Анализ колебаний конструкции спутника при наведении на солнце и землю с широтно-импульсной модуляцией управления двигателями

Автор: Сомов С.Е.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 3 т.9, 2007 года.
Бесплатный доступ
Рассматриваются проблемы колебаний конструкции космического аппарата при дискретных ал- горитмах широтно-импульсного управления реактивными двигателями в режимах наведения на Солнце и Землю. Представлены результаты динамического исследования в этих режимах спут- ника связи SESAT с крупногабаритными панелями солнечных батарей.
Короткий адрес: https://sciup.org/148198014
IDR: 148198014 | УДК: 629.786.2.062
Analysis of the satellite structure oscillations at guidance on the sun and the earth with width-pulse modulation of jet engines
Original methods for analysis of the spacecraft weak damping structure oscillations and for designing the spacecraft attitude control system wit width-pulse modulation of jet engines at initial modes, are presented.
Текст научной статьи Анализ колебаний конструкции спутника при наведении на солнце и землю с широтно-импульсной модуляцией управления двигателями
Колебания конструкции крупногабаритных космических аппаратов (КА) могут оказывать существенное влияние на их пространственное движение в режимах начальной ориентации на Солнце и Землю (РНОС и РНОЗ), которые выполняются последовательно после завершения режима начального успокоения [1]. Широтно-импульсная модуляция (ШИМ) управления реактивными двигателями (РД) в этих режимах имеет известные преимущества (например, в отношении затрат топлива) и применяется на многих КА. Спутник связи SESAT (Siberia Europe SATellite) с крупногабаритными панелями солнечных батарей (СБ) (рис. 1, [2]) разработан НПО ПМ им. акад. М.Ф. Решетнева, выведен на геостационарную орбиту в апреле 2000 г. и успешно решает целевые задачи. При полете этого спутника была экспериментально установлена квазимонотонная амплитудная зависимость декремента колебаний панелей СБ. Поэтому проблема нелинейного анализа динамики конструкции КА данного класса с малым декрементом колебаний панелей СБ в режимах начальной ориентации на Солнце и Землю является актуальной.
Системы координат
Инерциальные системы координат (СК), используемые для описания движения центра масс (ЦМ) и углового движения КА:
I⊕ (O⊕XeIYeIZeI) – инерциальная геоцентрическая экваториальная СК (ИСК) с началом в центре Земли O⊕ , осью XeI , направленной в точку весеннего равноденствия ϒ , и осью ZeI , направленной на Северный полюс мира PN по оси суточного вращения Земли, рис. 1;
I S (OsXsIYsIZsI) – инерциальная солнечноэклиптическая СК с началом в центре Солнца O s , осью XIs также направленной в точк у ϒ и осями YsI и Z Is , которые получаются поворотом соответствующих осей YeI и ZeI на угол εe относительно оси XeI ( XIs) , причем угол εe между плоскостями Земного экватора XeI O ⊕ YeI и эклиптики XIs OsYsI равен 0, 41015234 рад ( 23o27/ ), рис. 1.
Положение плоскости орбиты КА определяется долготой восходящего узла Ω o и наклонением i o , положение ЦМ КА на эллиптической орбите с большой полуосью a o и эксцентриситетом e o – радиусом-вектором r o( t ) и истинной аномалией ν o( t ), отсчитываемой от перигелия орбиты π , который находится на угловом расстоянии ωπ от ее восходящего узла в направлении движении ЦМ, рис. 2. Орбита КА считается известной, Ω o, i o, a o, e o, ωπ – известные константы либо функции времени, как и момент времени прохождения ЦМ О перигея орбиты t π . Истинная аномалия ν o ( t ) связана с аргументом широты u o ( t ) = ωπ + ν ο ( t ) и точно определяется в функции времени t как решение нелинейного дифференциального уравнения
V o( t) = Цо2(1 + eо cosv o( t))2/PO2 , (1) где µo – гравитационный параметр Земли, pο = aο(1 + eο2) – фокальный параметр орбиты. Текущий радиус орбиты rο (t) определяется соотношением rο(t)= pο/(1+eοcosνο(t)).
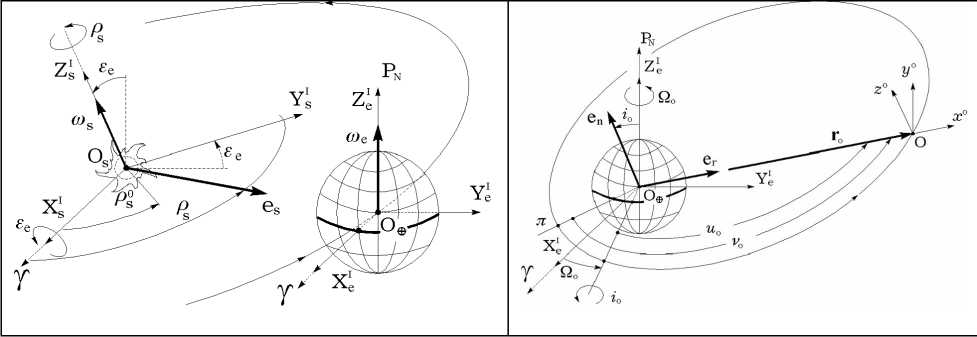
Рис. 1. Инерциальные СК
Рис. 2. Орбитальная СК
Орбитальная система координат (ОСК) O xoyozo (базис O ) вводится на рис. 2. Стандартно вводятся также связная система координат (ССК) O xyz и связанный базис B = { b i }, составленный из ортов b i , i = 1,2,3 = 1 ^ 3 = x , y , z , направленных по соответствующим осям ССК O xyz . Здесь и далее символ { • } обозначает вектор-столбец.
Кинематика и моделиортов внешних ориентиров
При традиционном обозначении [ a ] i для матрицы элементарного поворота правого ортогонального базиса относительно i -ой оси на угол a , а именно
c
a
0 - s a
[«],= 0
C a
s a
[a]2
-s
a
c a
s a 0
c
a
s a
[a]3
s
c a
ca = cosa; sa = sina.
Орт e s (см. рис. 1), в проекциях на оси ОСК обозначаемый как e o( t ) = К ( t ), e o y (t) , e o z (t)} , имеет вид
e o ( t ) = T o • [ -s eJ 1 [ -p s ( t )] з {1,0,0}, (2) где T 0 = [ u 0( t )] 3 [ i 0] 1 [ Q 0]3 - матрица направляющих косинусов координатного перехода из базиса I e (нижний индекс) в базис O (верхний индекс матрицы); астрономическая долгота Солнца p s ( t ) = p 0 + ю s ( t - t 0 ), p 0 =p s ( t o ) , см. рис. 2, t 0 – некоторый начальный момент
времени, ю s - средняя угловая скорость годового обращения Земли вокруг Солнца, ю s = 7,2921158 • 10 - 5 c - 1.
При последовательности { v } 1 ^ { 0 }з ^ { ф }2 углов поворота рыскания V , крена ф и тангажа 0 ССК относительно ОСК матрица направляющих косинусов T bo координатного перехода от базиса O к базису B вычисляется по формуле
Р», }] =[t, .t 2,t3 ] = MWvl, (3) где [•] - обозначение строки, здесь с компонентами в виде векторов-столбцов tj = {tij}. Наряду с кинематическими параметрами ориентации ССК относительно ОСК в виде углов Эйлера-Крылова у, ф, 0 и матрицы направляющих косинусов Tbo , имеющих очевидный геометрический смысл, в дальнейших расчетах используется нормированный кватернион Л0 = (X0o,X0), с векторной частью X0 = (Х0, i = 1,2,3), также однозначно определяющий ориентацию базиса B относительно базиса O . Вектор абсолютной угловой скорости ОСК V/0 относительно инерциальной СК Ie в проекциях на оси базиса O имеет представление V 0 = {0,0,v o}, причем на круговой орбите V 0 = ®0 = {О,О,ю0}. При векторе абсолютной угловой скорости ССК ω , определенном в базисе B в виде вектора-столбца ® = {юx, юy, юz}, решение кинематического уравнения с символом (о) кватернионного умножения уЛ0 = |(Л0 о ю - V0° Л0) (4) для кватерниона Л0 определяет ориентацию базиса B относительно ОСК O без какого-либо вырождения, в отличии от кинематичес-
ких соотношений для углов Эйлера-Крылова в используемой последовательности поворотов
V = ( ro z sin ф +ro x cos ф—v 0 sin V sin 9)/ cos 9;
ф = roy + ((гоz sin ф + гоx cos ф)sin ф—v 0 sinv)/cos9; (5) 9 = ro z cos ф —ro x sin ф — v 0 cos v , и при 4 (минимально-избыточном числе)
скалярных кинематических параметрах, свя- занных единственным условием нормировки, в отличии от 9 элементов матрицы направляющих косинусов Tob с шестью условиями ортогональности. Элементы матрица Tob выражаются по известным явным соотношениям через компоненты кватерниона
Лo, которые вычисляются в явном виде по значениям углов Эйлера-Крылова у, ф, 9 в указанной выше последовательности как Х°0 = c1c2c3+s1s2s3;
X ° = s 1 c 3 c 2
—
c 1 s 3 s 2;
Х°2 = c1c3s2—s1s3s2; X°= c1s3c2 + s1c3s2, где ci = cos(ai/2); si = sin(ai/2); a1 =v ; a2 =9 ; a3 = ф. Это позволяет легко опреде- лить начальные условия для интегрирования кватернионного кинематического уравнения
-
(4) с соблюдением условий нормировки и
- однозначно определить текущую ориентацию ССК относительно ОСК. Решение кинематического уравнения Л = 1Л ° ю для кватерниона Л определяет ориентацию базиса B относительно инерциального базиса Iф также без каких-либо сингулярностей. Направления ортов e° и eo в проекциях на оси ССК вычисляются по соотношению eo = Tob {1,0,0} = t1 = {t11, t12 ,t13}. При этом орт направления S из ЦМ КА на Солнце определяется как S = — es, а орт направления E на центр Земли - как E = — er, рис. 2.
Моделирование движения деформируемой конструкции КА
Для получения приближенных моделей движения упругих КА используется метод конечных элементов, представляющий собой локализованный метод предполагаемых форм колебаний. Применяемый здесь подход заключается в представлении упругих колебаний элементов конструкции КА в виде конечного числа тонов. При этом вычисляются матрицы коэффициентов взаимовлияния движений всех подконструкций КА как абсолютно твердых тел, включая корпус КА, так и деформируемых тел. Собственные формы и парциальные частоты колебаний каждой панели СБ КА Sesat рассчитаны с учетом nq = 10 низших тонов в стандартной нормировке, значения парциальных частот колебаний панелей представлены в [1,2]
Модель динамики углового движения КА с упругими неподвижными панелями СБ, составленная при упрощающих предположениях [2], имеет вид
A o
ю
• • q
F ro
F q
F
F q
— H — ю X G + M do + M o
— Dq — Wq
A o
J ( Y ) D q
( D q)т I q 2 n
Здесь q = {q1, q2} - вектор обобщенных координат упругих колебаний панелей СБ, где qkcR nq , k=1, 2 – вектор обобщенных координат упругих колебаний k-й панели СБ; f q = {Fq, fq} – вектор-столбец обобщенных сил, соответствующих колебаниям панелей СБ, где Fq = —(5/п)Qk qk—Q2qk ; диагональная матрица Qk = diag{Qks} составлена из парциальных частот Qks, s = 1 ^ nq и 5 - логарифмический декремент колебаний панелей СБ, матрица собственного демпфирования D = (5 /п) Q, причем матрицы Q = diag{ Q 1, Q 2} , W= Q2; G = J(y)ю + H+ Dq(y) q - вектор кинетического момента (КМ) упругого КА с гироскопическим стабилизатором (ГС), где H – вектор собственного кинетического момента ГС, причем вектор H = 0 в режимах наведении КА на Солнце и Землю; Mо = M! + Mo - суммарный вектор возмущающих моментов относительно полюса О, где Mgo– вектор гравитационного момента и Mso – вектор момента возмущающих сил солнечного давления, остальные внешние возмущающие моменты на геостационарной орбите пренебрежимо малы; Mdoo– вектор моментов двигательной установки ориентации (ДУО). Прямоугольная матрица Dq (у) инерционного взаимовлияния движений панелей СБ и корпуса КА представляется матрицей-строкой Dq = Dq(y) = [Dq(y), Dq(y)], при- чем структура матриц D1q и Dq2 инерционного влияния упругих панелей СБ такова:
-
- матрица D q = { D q 1 , D q2 , D q3 } представляется столбцом, составленным из строк,
-
- D kj - строки матриц влияния, j = 1,2,3 - номер строки; k = 1,2 - номер панели.
Тензор инерции КА J в полюсе O при произвольном положении панелей СБ, определяемом углом у , вычисляется по формуле J = J ( y ) = J o + 2 J p( y ), причем тензор инерции J p( y ) каждой панели СБ рассчитывается по соотношениям
J p( y ) =
J X C Y + JP y S 2 J Xd C Y S Y 0
pd
J xy C Y S Y
J X S 2 + JP y C 2
0 J z p
;
J Pd = J P - J p ; C y = cos Y ; S y = sin Y , где y = 3 n /2 для положения панелей СБ при завершении режима успокоения, когда спутник вращается в ИСК с вектором угловой скорости to ~ to c, где to c = { to X , ra y , to Z } - вектор-столбец, составленный из командных угловых скоростей по осям ССК O xyz . Для спутника Sesat принято ra c = to Z = 0 o /с; ra y = 0.2 o /с , поиск направления на Солнце осуществляется вращением КА относительно оси O y ССК.
Модели компонентов системы ориентации
Приборный состав системы управления ориентацией КА в РНОС и РНОС состоит из ДУО на основе шести термокаталитических реактивных двигателей (РД) с широтно-импульсной модуляцией (ШИМ) тяги, приборов ориентации на Солнце (ПОС) и Землю (ПОЗ), блока трех одноосных датчиков угловой скорости (ДУС), а также БЦВМ, реализующей алгоритмы фильтрации дискретных измерений и цифрового управления.
Математические модели ДУО и блока ДУС подробно представлены в [1,2], поэтому здесь приводятся только необходимые соотношения. Модель ШИМ нормированного сигнала Pn ( t, τ k d ) включения РД принята в виде
'0 Tk < Tm
|
d |
т k |
т т |
- |
т k |
< т т |
|
т k =1 |
т т |
m т |
- |
т k |
< T u |
T u
T k > T u
Здесь Pn(t,тdd) e {0,1}, k e No ^ [0,1,2...) -сигнал включения реактивного двигателя, t e [tk,tk + тd), тd =тd(tk) - длительность включения; тk - командный входной сигнал, поступающий в моменты времени tk = k Tu, где Tu – период управления. Изменение нормированной тяги Pdn(t) каждого РД с учетом времен-нуго запаздывания Tzdu описывается дифференциальным уравнением TdPП iPn =Pn(t-Td , тd) с d d zu, k начальным условием Pdn(t0) = 0, где Td- постоянная времени, причем Td = T+d, если Pn = 1; иначе Td = Td. Для последовательности командных импульсов Pn(t,Td) с длительностями тd на полуинтервалах времени t e [ tk, tk+1) начальные условия для этого уравнения в моменты времени t = tk + Tdu и t = tk + Tdu + Tk получаются “припасовыванием” по непрерывности решения Pdn(t).
Каждому j -му РД D j , j = 1 ^ 6, сопоставляется вектор текущей реактивной тяги P. ( t ) = PmPdn j ( t ) • P j с фиксированным ортом p j и началом в точке Od j , где Pm – одинаковое для всех РД значение текущей максимальной тяги. Расположение точки Od j относительно полюса O определяется радиусом-вектором ρ j . Управляющие моменты ДУО относительно осей O x , O y и O z ССК создаются парами РД (D1,D2) , (D3,D4) и (D5 ,D6) соответственно, причем РД с нечетным номером в i -ой паре создает управляющий момент положительного знака относительно соответствующей i -ой оси, i = x , y , z. Логика формирования команд т jk включения каждого j -го РД в составе ДУО учитывает знак командного входного сигнала v ik по соответствующему каналу управления i = x , y , z и для значений индекса k e N0 описывается следующим алгоритмом:
т ik = 1 v ik I; s ik = sign v ik ; i = x , y , z ;
pn( t , т d ) =^
tk - t < tk +т d
tk +T k - t < tk+1
т 1 k
1т 1 k
= т xk , т 2 k = 0 , = 0 , т 2 k = т xk ,
s xk > 0;
s xk
< 0;
<
T 3 k = T yk , T 4 k = 0,
T 3k = 0 , T 4k = T yk ,
T 5 k = T zk , T 6 k = 0,
T5k = 0, T6k = Tzk , syk > 0;
s yk < 0;
s zk > 0;
s zk < 0.
Вектор управляющего момента M d ο ο , формируемого ДУО относительно полюса О, в проекциях на оси ССК вычисляется по формуле 6
j =1
Используются обозначения M i m для максимальных значений модулей моментов ДУО по каналам управления и стандартные функции:
• ограничения
Sat( a , x )
x
a sign x
|x| < a
|x| > a ;
Sats( a, k, x ) =
k x
a sign x
x | < a /k x | > a /k ;
• релейная гистерезисная функция общего вида
Relh( a ,b, X , x( t ))
signx( t )
x > X b x < b
Relh( a ,b, X ,x( t 0)) = a е { - 1,0,1}
-
• функция “генерации” импульсов длительностью т < T u , начиная с момента tk :
Puls( t k, T ,xk) = <
xk 0
t k < t < t k + т tk+ т < t < tk+1
-
• функция фиксации сигнала на периоде T u : Zh ( Tu,xk ) = Puls( t k ,Tu,xk );
-
• функция квантования по уровню y = Qntr( a , x ) = a E[( x / a ) + 0,5sign x ], где a -шаг дискретизации и E [ • ] - символ целой части числа [ • ].
Применяются также стандартные обозначения для значений скалярного дискретного сигнала y( tk ) = y k и y( t s ) = y s соответственно в моменты времени tk = k Tu и в кратные им моменты времени t s = s T q с периодом измерения T q , причем кратность n q = Tu / T q – целое положительное число, где целые числа k,s е N0.
Модель блока измерителей скорости (БИС) корпуса КА to ( t ) = { ro x( t ), ro y( t ), ro z ( t )} представляет совокупность трех однотипных каналов измерения угловой скорости ro i ( t ), i = x,y,z одноосными ДУС, каждый из них описывается соотношениями
T“( b s( t ) + ro s( t ) = ro ( t );
ro se ( t ) = Sats(b “ , k ш , ro s ( t ) + ro b);
ro " = ro se( t s) + ro sn; ro d = Qntr(d “ , ro " ), где Tq – период квантования измеряемого сигнала по времени, ω sd – дискретный выходной сигнал и все параметры описаны в [2].
Выходными сигналами оптико-электронного ПОС являются признак наличия Солнца Ns в его поле зрения и сферические угловые координаты 0 s , v s орта S направления на Солнце относительно орта b 1 (оси O x ) ССК. Рабочее поле зрения ПОС составляет 2 A S = 184 ° в плоскости BsOCs и 2 BS = 64 ° в плоскости AsOBs - см. рис. 3, г де представлена привязка приборных осей ПОС к осям ССК и связь углов a s и р s, определяющих положение орта S в приборной СК, с углами 0 s, v s.
В моменты времени t s = ts - Tzs по значениям проекций орта S ( t ) = { sx ( t ), sy ( t ), sz ( t )} в базисе B вычисляются угловые координаты a s , в s этого вектора в приборной СК, признак наличия Солнца Ns в поле зрения ПОС, и далее в дискретные моменты времени t s = s T q формируются дискретные значения измеренных углов 0 d s , v d s с учетом методических погрешностей, дискретного шума измерения и дискретизации сигналов по уровню:
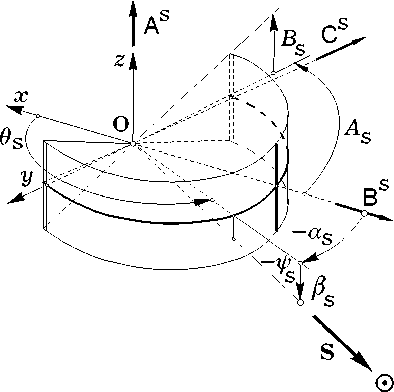
Рис. 3. Схема ПОС
β s ( ts ′ ) = arcsin( sz ( ts ′ ));
α s ( ts ′ ) =π- arctg( sy ( ts ′ )/ sx ( ts ′ ));
N s s = N s ( t s ′ ) = n α ( t s ′ ) n β ( t s ′ );
ss
ψ s ss =ψ s ss ( t s ) =β s ( t s ′ )N s s ;
θ s ss =θ s ss ( t s ) = ( π-α s ( t s ′ ))N s s ;
xsd = Qntr( dx , xss + xb + xsn ), x = ψ s ,θ s .
Здесь nx ( t ) = Nh( nx 0, bx , λ x , x ( t )), x = α s , β s , релейная гистерезисная характеристика наличия ориентира
Nh( a , b , λ , x ) = 1 - Relh( a , b , λ ,| x |) графически представлена на рис. 4; ψ b s ,θ b s – квазипостоянные погрешности ПОС, обусловленные неточностью привязки приборной СК к ССК; ψ n ss , θ s n s – дискретные шумы измерения, которые считаются гауссовскими независимыми стохастическими процессами с нулевым математическим ожиданием и среднеквадратическим отклонением σ s ; d θ s = d ψ s = ds – шаг квантования выходных сигналов по уровню.
Прибор ориентации на Землю (ПОЗ) предназначен для определения отклонения оси минус O x ССК по углам тангажа и крена от направления на центр Земли. Принятая математическая модель описывает формирование выходных дискретных сигналов ПОЗ θ d s , ϕ d s об углах отклонения КА по тангажу и крену и признак наличия Земли Ne в поле зрения прибора.
Схема привязки приборной СК ПОЗ к ССК представлена на рис. 5. В моменты времени t ′ s = ts -Tze по значениям проекций орт а E ( t ) = { ex ( t ), ey ( t ), ez ( t )} в базисе B вычисляются угловые координаты α e , β e этого вектора в приборной СК, признак наличия Земли Ne в поле зрения ПОЗ, и в моменты времени t s = s Tq формируются значения измеренных углов θ d s , ϕ d s с учетом методических погрешностей, дискретного шума измерения, ограничения и дискретизации сигна-
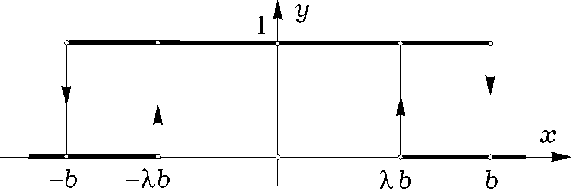
Рис. 4. Характеристика наличия ориентира
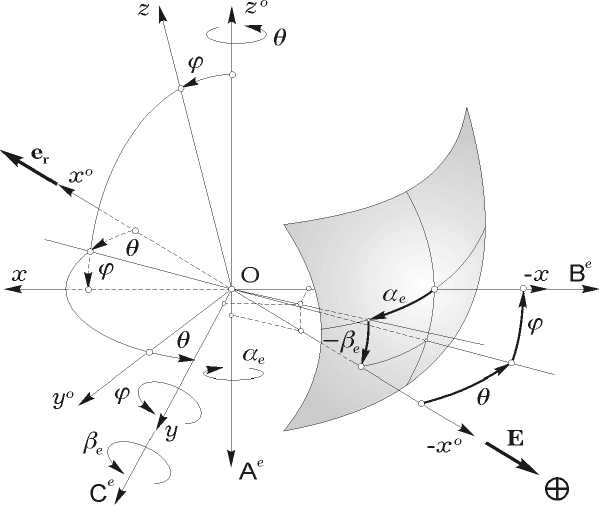
Рис. 5. Схема ПОЗ лов по уровню:
β e ( te ′ ) = arcsin( - ez ( ts ′ ));
α e ( te ′ ) = arctg( ey ( ts ′ )/ ex ( ts ′ ));
N s e = Ne( t s ′ ) = n α ( t s ′ ) n β ( t s ′ );
ss nx(t) = Nh(nx0, bx, λx, x(t)), x= αe,βe
ϕ s s =ϕ s s (t s ) =-β e (t ′ s ) ⋅ N e s ;
θ s s =θ s s (t s ) =α e (t ′ s ) ⋅ N s e;
xsd = Qntr(d x ,Sat( ax , xss + xb + xsn )), x =ϕ,θ .
Здесь ϕ b ,θ b – квазипостоянные погрешности ПОС, обусловленные как неточностью привязки приборной СК к ССК, так и дрейфом точки отсчета статической характеристики из-за несферичности Земли; ϕ s n , θ sn – дискретные шумы измерения, которые считаются гауссовскими независимыми стохастическими процессами с нулевым математическим ожиданием и среднеквадратическим отклонением σ e ; a ϕ , a θ – уровни ограничения выходных сигналов; d θ = d ϕ = de – шаг квантования выходных сигналов по уровню.
Дискретные алгоритмы фильтрации и управления
Оператор осреднения с одинаковыми весами только nq последних измерений ys сигнала с получением оценки yk , оптимальной по методу наименьших квадратов, называемый обычно алгоритмом осреднения координаты (АОК), имеет описание yk =MS(ys)≡( ∑ys)/nq ;
s = k -nq +1
n q = Tu / Tq ; k = E[ s /n q ], k, s e N 0 •
Для КА Sesat принято Tq = 1c и T u = 4c, поэтому здесь кратность периодов nq = 4. АОК используется для многократной дискретной фильтрации выходных дискретных сигналов to d БИС, 0 1 , у 1 ПОС и в ! , o d is ss ss s s
ПОЗ:
to k = M S( to d s ), i = x, y ,z ;
0 sk = MS( 0 ds ) ; v sk = ms( v ds ); (8)
k x и k to — коэффициенты усиления, у s — постоянное командное значение угла рыскания и c 1 – ограничение сигнала по модулю.
С целью наведения КА на Солнце по кратчайшему пути после попадания Солнца в поле зрения ПОС (т.е. при N s = 1) предлагается дискретный векторный алгоритм управления. Согласно этому алгоритму сначала формируется предварительный дискретный сигнал
ф k = MS( ф d ) ; 0 k = MS( 0 s ').
В РНОС на спутнике Sesat используется канальный алгоритм формирования дискретных команд v ik включения пар РД в состав е ДУО:
по каналу тангажа vzk = kp(kpp Sat( c з, 8 sk) - k to tozk), (9) где
8 zk
0 s — 0 sk
k
E ( to zA )
, j =0
N s K n = 1;
N s K n = 0;
N sto N s = 1;
N n to N s = 0;
(| v sk < V sn ) & (| to yk | < to yn );
(| v sk >V sn ) v (| ю yk | > to yn );
kp – коэффициент компенсации вариации тяги РД, см. [1,2], k z и k to — коэффициенты усиления, 0 s = 0 s = 7/12 л - командное значение угла ориентации КА относительно орта S , рис. 3, v sn = 3 ° , m yn = 1 угл. мин/с и c 3 -некоторая константа;
по каналу крена v yk = kp ( kp Ф s (c 21, c 22,N s , 8 yk ) - k to toyk ), (10) где
. ( , ATs \ [Sat( a , x ) N s = 1;
ф l a , b ,N s , x ) =]
-
sV 7 - b N s = 0;
-
8 sy =ф s v sk cos 0 sk ; kp и k yy - коэффици енты усиления, ф с = 0 - командное значение угла крена и c 21, c 22 – некоторые константы;
по каналу рыскания v^ = k„(kpp Sat( c, 8 xsk) - k totoJ, (11) xk p x 1 sk x xk где
~k = -kp(kp pk + ktotok),i = x,y,z -1,2,3, (12) где при постоянном векторе bs требуемого положения орта направления на Солнце в ССК и обозначениях s(t) = sл' = x, y,z ; is is sik = MS(sis); Sk = {sik} компоненты Pk вектора pk = {p1 k, p2k, p3k} вычисляются по соотношению pk = bs x Sk. Далее вычисляется значение ~™ = max(| ~k |,i = x,y,z) и при условии ~m > Tu результирующие дискретные команды включения ДУО по каналам приводятся к масштабу максимальной длительности работы РД на такте управления по простой формуле
V» = T u ~ k /~ mm , i = x , y , z . (13)
В РНОЗ дискретное управление vzk по каналу тангажа формируется в соответствии с алгоритмом управления (9) по этому каналу в РНОС. Одновременно ПОЗ при наличии Земли в его поле зрения (т.е. при ne = 1) выдает дискретные сигналы фs и 0ds , которые после осреднения с помощью АОК принимают в моменты времени tk значения фk, 0k (8). При выполнении условия (| фk |< 1 o) & (| 0k |< 1 o) координата 0sk в (9) заменяется на координату 0k. Алгоритм управления по каналу крена в этом режиме имеет вид vyk = kp(kp ф e (c 2,N e , 8 yk ) - k to toyk ), (14) где 8yk = фk- фk;
Ф . ( b ,N e , x ) =
x
s
N e = 1;
_- b N e = 0;
x sk
V s —V sk sin 0 sk
k
Sat( c „ E (® xk T,))
j =0
N s = 1;
N s = 0,
kp и kto - коэффициенты усиления; фk = 0 -командный сигнал по углу крена и c2 –поис-ковая уставка. Наконец, алгоритм управления по каналу рыскания в РНОЗ представляется соотношением vxk = k„(kpSat(cj,8xk)-kx’to.J, (15) xk p x 11 sk x xk где
c 12 -v sk N e = 0;
V c + K s v ok -^sk N e = 1; s o sk sk
K o s
= <
(| ф k\ < 1 ° )&(\ to xk\ <to 0 )
&( \ to yk\ < Ю 0 )&( \ to zk\ < Ю 0 ); \ (\ ф к\ > i o ) л (\ ш хк\ > ю о )
л ( \ to yk | > to 0 ) л ( \ to zk | >ю 0 );
kPp и к to — коэффициенты усиления; vtok = arcsin(sin(Ps(tk) sinse) - командный сигнал на отработку солнечного склонения; ps (t) - астрономическая долгота Солнца, см. рис. 1; уc - командное значение угла рыскания; параметр to0 = 1 угл. мин/с; c11, c12 – соответственно ограничение сигнала по модулю и поисковая уставка.
Динамические свойства упругого объекта
Выполняя линеаризацию пространственной упругой модели КА (6) при постоянном значении вектора H КМ ГС, совпадающего по направлению с ортом b 3 ССК относительно некоторого состояния КА в инерциальном базисе при произвольном векторе вращения КА to c, M = M do , q = q = 0 и векторе невязки 5 Ю = ю - ю с по угловой скорости КА получаем линейную непрерывную модель.
В РНОС вектор кинетического момента ГС H = 0 и поисковое движение для захвата Солнца ПОС выполняется относительно оси Oу ССК, т.е. вектор toc = {0,toy,0}, где toy = 0,2 o/c. При практически диагональном тензоре инерции КА с панелями СБ в парковом положении движение КА по каналу крена отделяется от взаимосвязанных движений по каналам рыскания и тангажа. Отсюда следует, что влияние упругости конструкции КА по каналу крена в РНОС будет точно таким же, как и в режиме успокоения, причем частотные характеристики по каналам рыскания и тангажа будут изменяться только в их низкочастотной части за счет гироскопической взаимосвязи каналов поисковой угловой скоростью to у =0,2 %=0,0035р/с вращения спутника относительно оси крена. В режиме поиска Земли уже все три канала взаимосвязаны поисковой угловой скоростью, что четко проявляется на частотных характеристиках каналов. Также как и в РНОС, при заданном значении командной угловой скорости поиска Земли завязка каналов в РНОЗ является слабой , поэтому вполне обоснованно можно автономно проводить параметрический синтез дискретных алгоритмов управления по отдельным каналам при наведении КА как на Солнце, так и на Землю.
В режиме предварительной ориентации на Землю, который реализуется после завершения РНОЗ, выполняется разгон ротора ГС [3] до величины его КМ Н = 85 Нмс. Для анализа собственных динамических свойств упругого КА, как непрерывного объекта управления, при разгоне ротора ГС в этом режиме были построены частотные характеристики по каналам для трех фиксированных значений модуля КМ в парковом состоянии ГС. В качестве примера на рис. 6 представлена логарифмическая частотная характеристика по каналу рыскания. Здесь явно видно, что при наличии КМ ротора ГС появляется дополнительный резонансный пик, соответствующий
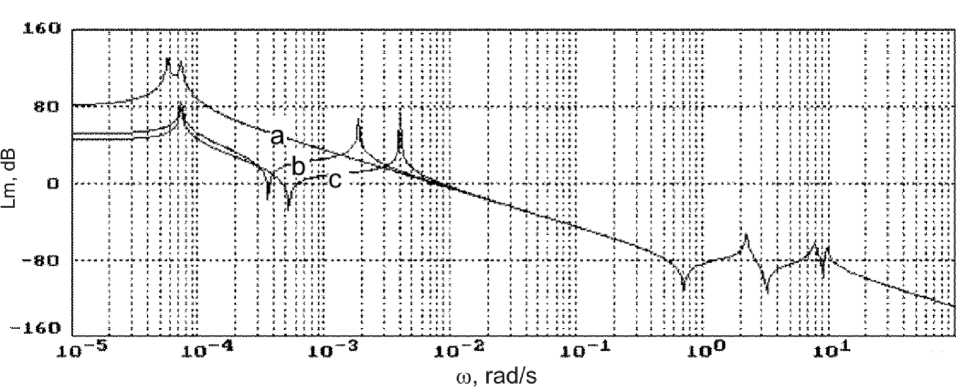
Рис. 6. Канал рыскания: a) H=0; b) H =40 Нмс; c) H =85 Нмс
нутационным колебаниям КА из-за наличия собственного кинетического ГС. Этот резонансный пик последовательно сдвигается вправо с возрастанием значения КМ H, как параметра. Тем не менее, при номинальном значении H= 85 Hмс среднечастотный участок имеет наклон 40 dB/dek, что вполне соответствует условиям автономного параметрического синтеза дискретных алгоритмов управления по отдельным каналам также и в этом режиме.
Список литературы Анализ колебаний конструкции спутника при наведении на солнце и землю с широтно-импульсной модуляцией управления двигателями
- Сомов С.Е. Нелинейная динамика упругого спутника при начальном успокоении//Известия Самарского научного центра РАН. 2005. Т. 7. № 1.
- Сомов С.Е. Динамика успокоения упругого спутника при широтно-импульсной модуляции управления двигателями//Известия ВУЗов. Сер. "Авиационная техника". 2005. № 4.
- Сомов С. Е. Динамика начальных режимов упругого геостационарного спутника с широтно-импульсным управлением двигателями и разгоном ротора силового гироскопического стабилизатора//Навигация и гироскопия. 2006. № 4 (55).
