Анализ механизма заключающих платин вязально-прошивных машин

Автор: Мурадов А.А.
Журнал: Экономика и социум @ekonomika-socium
Рубрика: Основной раздел
Статья в выпуске: 12-1 (79), 2020 года.
Бесплатный доступ
В статье рассматривается вопросы определение технологических и конструктивных ограничений на движение заключающих платин вязально-прошивных машин
Вязально-прошивная машина, рабочие органы, закон движение, технологические ограничение, конструктивные ограничение
Короткий адрес: https://sciup.org/140258127
IDR: 140258127 | УДК: 62-1/-9
Analysis of the mechanism of closing plates of knitting and stitching machines
In this article, considered the question of clarifying the parameters of the movement of the working organs of knitting and piercing machines, taking into account technological and constructive conditions.
Текст научной статьи Анализ механизма заключающих платин вязально-прошивных машин
Целесообразность создания новой конструкции определяется тем, насколько вновь создаваемая машина отвечает требованиям развития экономики. Это условие определяет и требования к текстильному машиностроению, перед которым стоит задача - всемерно снижать себестоимость выпускаемой продукции. Решение этой задачи возможно только в том случае, если новая обеспечивать повышение производительности оборудования путем интенсификации скоростных режимов, повышение принципиально новых методов переработки сырья при изготовление продукции. Из перечисленных задач вытекает одно из направлений в машиностроении для текстильной промышленности -модернизация оборудования, то есть улучшение технико - экономических показателей [1,2]. Основным и принципиально важным направлением в модернизации машин является конструктивная преемственность, которая характеризуется степенью использования деталей, сборочных единиц и отдельных механизмов, применяющихся в базовой, исходной конструкции машин.
Технологические ограничения на взаимную установку и движение исполнительных органов определим, рассмотрев условия выполнения операций технологического процесса. Направленный на получение петельной структуры, этот процесс представляет собой последовательность десяти известных технологических операций: заключения, прокладывания, вынесения, прессования, нанесения, соединения, кулирования, сбрасывания, формирования, оттяжки. Взаимные положения исполнительных органов, определяющие условия выполнения технологических операций называются контрольными положениями исполнительных органов. Анализ контрольных положений позволяет сформулировать технологические ограничения на взаимную установку и движение исполнительных органов [3]. Механизм привода заключающих платин служат для облегчения работы пазовой движковой иглы при прокалывании волокнистого холста. Верхние платины подводятся в зону вязания в момент прокола движковой иглой волокнистого холста снизу вверх, прижимая его к неподвижным платинам [4]. При движении движковой иглы в обратном направлении платины выводятся из зоны вязания, не мешая протаскиванию нити через волокнистый холст.
Угол, характеризующий начальное положение кривошипа механизма привода заключающих платин – α =20º. Необходимые данные для анализа механизма: длина звеньев, координаты оси вращения и кинематическая схема показаны на рис.1.
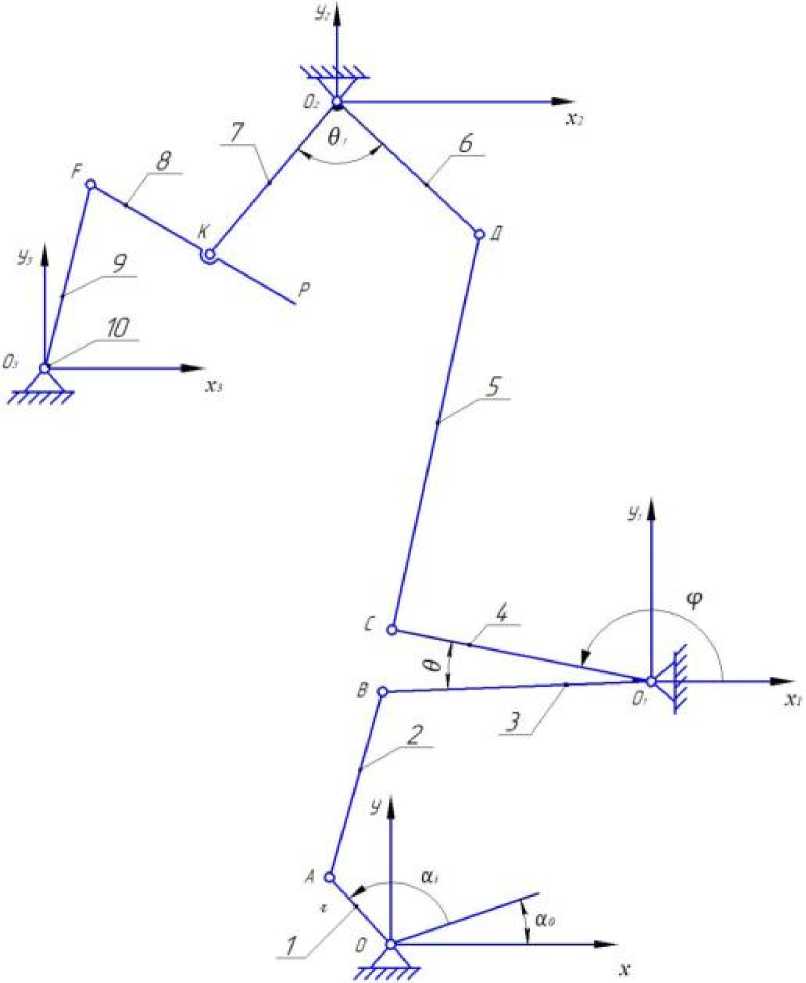
Рис-1. Кинематическая схема привода заключающих платин
Наша задача определить перемещение звеньев, описываемые точками звеньев, в зависимости от угла поворота главного вала машины α .
Как известно, анализ механизма можно провести графическим или аналитическим методом.
Аналитическое решение задачи о положениях звеньев механизма будем находить по методу преобразования координат. Для определения положений всех звеньев механизма достаточно задать значение обобщенной координаты и постоянные параметры механизма. Механизм привода заключающих платин – плоский рычажной механизм первого класса, образованный последовательным соединением трех шарнирных передаточных четырех звенников. Поэтому кинематический анализ выполняется в последовательности присоединения этих групп. систему координат ХОУ. Координаты точки А в неподвижной системе координат находятся из соотношений:
Х А = l OA cOs( " । « 0 )
Y A = l OA sinC ^ y + a o ) (1)
Где α – углы поворота главного вала машины.
Координаты точки О 1 заданы схемой механизма. Следовательно, для первого шарнирного четырехзвенника ОАВО оказываются известными координаты точек А и О , то есть центров элементов внешних пар, что дает возможность найти положение точки В в системе ОХУ. Положение звена плоского механизма в движении относительно стойки определяется либо координатами двух его точек, либо координатами одной точки, расстоянием ее до другой точки и углом наклона линии, соединяющей эти точки. Для определения неизвестных координат точки воспользуемся известной теоремой из курса аналитической геометрии для определения растояния между двумя данными точками. Имеем систему двух уравнений ( X B - X o i ) 2 + (Y B - Y o 1 ) 2 = L2OB
( Xb - Xa ) 2 + (Yb - Ya ) 2 = L 2 ab
Где X , Y – искомые координаты точки В.
Система уравнений выражает условия пересечения геометтрических мест точек В в незамкнутых кинематических цепях АВ и ВО , то есть пересечения окружностей с центрами в точках А и О и радиусом L иL .
Решая систему уравнений (2) получаем
Х B = М - Y b N (3) Y b = T ± 4T 2 - D
12 -l2 -X2-Y2+X2+Y2 Y -Y
AB ^01 B A] a A + ^Oj + J0i _ Y 01 YA
Где
2( X 0 1 - X A ) X 0 1 - X A
M * N — Y + X * N ( X„ + M ) + Y — 10 n
0 j 0 j 0 Oy / 0 j 0 j B
1 + N 2 " 1 + N2
,
Для определения координат точек остальных двух шарнирных передаточных четырёхзвенного О СД O и O КF O расчет проводится аналогично.
Зная координаты Х и Y в зависимости от угла поворота главного вала α можно определить необходимое перемещение заключающих платин, которое удовлетворяет технологическим условиям, путем подбора радиуса кривошипа L , при движении движковых игл.
Список литературы Анализ механизма заключающих платин вязально-прошивных машин
- Проектирование исполнительных механизмов вязально-прошивных машин "Экономика и социум" №12 (67), 2019г.
- Muradov A.A. Pirnazarov A.U. Flexible joined needle mechanism for knitting stitch-bonding machines. Актуальные научные исследования в современном мире".5 (25), 104-106,Украина. 2017,май
- Мурадов А.А. "Исследование и разработка механизмов петлеобразования с упругими звеньями для вязально-прошивных машин". Дисс. канд. тех. наук., -М., 1990.
- Мурадов А.А. Проектирование петлеобразующей системы вязально-прошивных машин. Вестник ТашИИЖТ 2016г.№4
