Анализ перспективных направлений в проектировании протезов коленного сустава нового поколения

Автор: Епишев В.В., Эрлих В.В., Сапожников С.Б., Бурнашов Я.В.
Журнал: Человек. Спорт. Медицина @hsm-susu
Рубрика: Восстановительная и спортивная медицина
Статья в выпуске: 2 т.24, 2024 года.
Бесплатный доступ
Цель: определение современного состояния исследований при проектировании протезов коленного сустава.
Протез коленного сустава, активный протез, пассивный протез, кинематика, проектирование
Короткий адрес: https://sciup.org/147244057
IDR: 147244057 | УДК: 796.01:61 | DOI: 10.14529/hsm240224
Analysis of emerging trends in the design of next-generation knee joint prostheses
Aim. This study aims to ascertain the state of current research on the design of knee joint prostheses.
Текст научной статьи Анализ перспективных направлений в проектировании протезов коленного сустава нового поколения
Введение. Во всем мире тысячи людей ежегодно страдают от осложнений различных заболеваний, таких как диабет, заболевания системы кровообращения и сосудов, травмы и рак, которые могут привести к ампутации конечностей. Ампутация конечностей значительно снижает качество жизни, особенно в случае ампутации нижних конечностей, поскольку это затрудняет подвижность людей с ампутированными конечностями [12].
По данным Product narrative: prostheses, в мире на 2017 год жили около 64 млн человек с ампутациями (рис. 1).
8,51 млрд долларов США к 2028 году, при среднегодовом темпе роста 5,20 % в течение прогнозируемого периода [26]. По оценкам Prosthetics and Orthotics Market by Type, Enduser, and Geography – Forecast and Analysis 2023–2027, в период с 2022 по 2027 год рынок протезирования и ортопедии будет расти в среднем на 6,1 % в период с 2022 по 2027 год. Прогнозируется, что размер рынка увеличится на 2944,61 млн долларов США [27].
Рост рынка зависит от нескольких факторов, включая достижения в области протезноортопедических технологий, растущую распространенность хронических заболеваний и инвалидности, а также растущий спрос на персонализированные и индивидуальные решения. Кроме того, наблюдается рост военных конфликтов, числа дорожно-транспортных
Number of People with Amputations
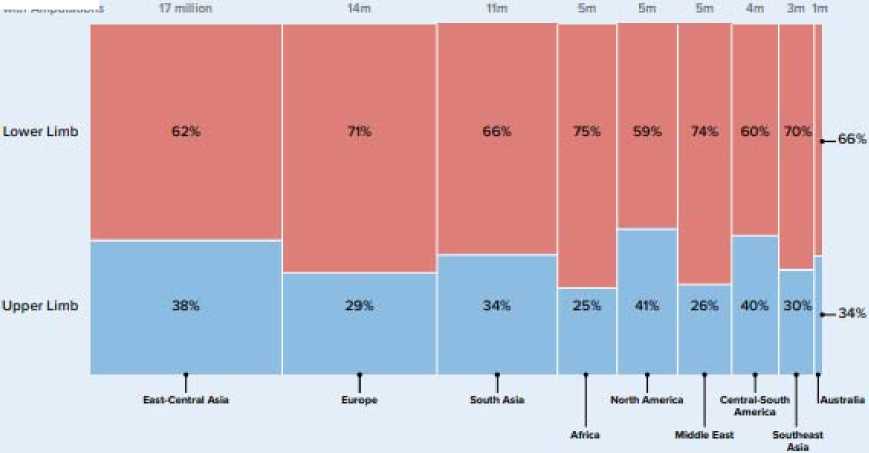
Рис. 1. Региональное распределение людей, живущих с ампутациями (2017 г.) Fig. 1. Regional distribution of people with amputations (2017)
происшествий, остеосаркомы, а также ампутаций, связанных с диабетом. Ожидается, что сегмент протезирования нижних конечностей будет занимать значительную долю на рынке в течение прогнозируемого периода.
Цель исследования – определение перспективных направлений в проектировании протезов коленного сустава нового поколения.
Материалы и методы. Был проведен анализ публикаций, индексированных в Web of Science, Google Scholar и Scopus, для рассмотрения перспективных направлений и обобщения современных подходов к проектированию протезов коленного сустава. Выборка по тематике формировалась только из исследований за последние 7 лет.
Результаты. Рынок протезирования и ортопедии является конкурентным и фрагментированным, на нем присутствует несколько глобальных и международных игроков. Ключевые игроки принимают различные стратегии роста для расширения своего присутствия на рынке, такие как партнерство, соглашения, сотрудничество, запуск новых продуктов, географическое расширение, а также слияния и поглощения. Одними из ключевых игроков рынка являются Ossur, Blatchford Inc., Ottobock, Bauerfeind AG, WillowWood Global LLC.
По данным РБК [1], российский рынок – один из крупнейших по числу пациентов, нуждающихся в протезировании.
По данным Минтруда РФ, ежегодно 1,5 млн граждан с инвалидностью обеспечиваются за счет федерального бюджета техническими средствами реабилитации (ТСР). Из них более 200 тыс. человек имеют протезы конечностей.
Уход с рынка иностранных компаний открывает для отечественных игроков новые возможности, отмечают эксперты. Еще недавно российский рынок протезов в основном был дистрибьюторским, на нем доминировали несколько крупных зарубежных корпораций. В частности, на импортную продукцию приходилось до трех четвертей всех поставок бионических протезов, доля импортных классических механических протезов была еще больше.
До 85 % спроса на средства реабилитации составляет госзаказ, следует из стратегии развития производства промышленной продукции реабилитационной направленности до 2025 года. В соответствии с постановлением правительства РФ № 877 от 31 декабря 2005 года, государство обязано обеспечивать граждан с инвалидностью необходимыми протезами или предоставить компенсацию на их покупку.
Одними из ключевых игроков рынка РФ являются ФГУП «ЦИТО», «Метиз», НОЦ «Ортос», «Медитроника Фут Системс», «Салют Орто», НПК «СПП», «Ортокосмос», НПФ
«Галатея», «Моторика», «Техбионик», «Ско-лиолоджик.ру».
Ампутации подразделяются на верхние и нижние конечности. В США ампутации нижних конечностей составляют почти 97 % от всех ампутаций, что указывает на актуальность проблемы протезирования именно нижних конечностей.
Протезы нижних конечностей предназначены для восстановления некоторых двигательных функций – амортизации, устойчивости и обеспечения движения. Большее внимания уделяется ампутациям голеностопного сустава и на уровне ниже колена из-за большей количественной потребности [25].
Выбор конструкции протеза нижних конечностей зависит от уровня подвижности человека и его способности им пользоваться. Этот уровень оценивается врачом, после чего лицам с ампутированными конечностями присваивается уровень К, который имеет значения К0, К1, К2, К3 или К4. Эта классификация определяет способность людей с ампутированными конечностями безопасно использовать протез стопы, где K0 представляет людей с ампутированными конечностями, которые не имеют возможности безопасно ходить без посторонней помощи, а K4 представляет людей с ампутированными конечностями, которые могут легко использовать протез и выполнять динамические действия.
Современный подход к разработке перспективных конструкций протезов нижних конечностей направлен на максимально возможное повторение биомеханики ходьбы человека (рис. 2). В фазе опоры сначала ударяется пятка стопы, затем стопа становится плоской, затем происходит середина позиции, когда на стопу приходится весь вес тела, пятка отрывается и отрывается носок. В фазе переноса происходит ускорение стопы, средний поворот и замедление стопы.
Критерии назначения и выбор протеза коленного сустава зависят от взаимодействия пациента и протеза. Функциональные уровни людей с ампутациями выше колена можно разделить также на уровни К в зависимости от способности пациента самостоятельно выполнять повседневные жизненные задачи. Во время горизонтальной ходьбы основная функция коленного протеза – попеременная опора и перенос веса тела.
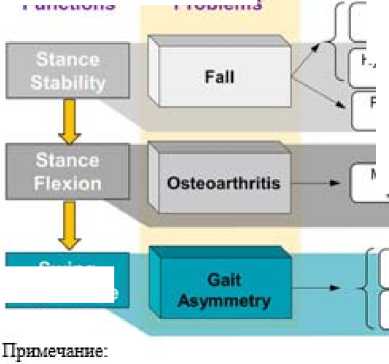
Стабильность и устойчивость протеза коленного сустава – ключевые функции, необходимые для безопасной и естественной ходьбы. Желаемое движение и крутящий момент протеза коленного сустава на разных стадиях неразрывно связаны с его функциональными структурами и компонентами. На рис. 3 представлены требования к протезу коленного сустава по Liang W. с соавт. [21].
Устойчивость стойки (Стабильность позиции, Stance Stability) – предотвращение падений на ранней стадии опоры и возможность коленному протезу сгибаться на этапе предварительного замаха.
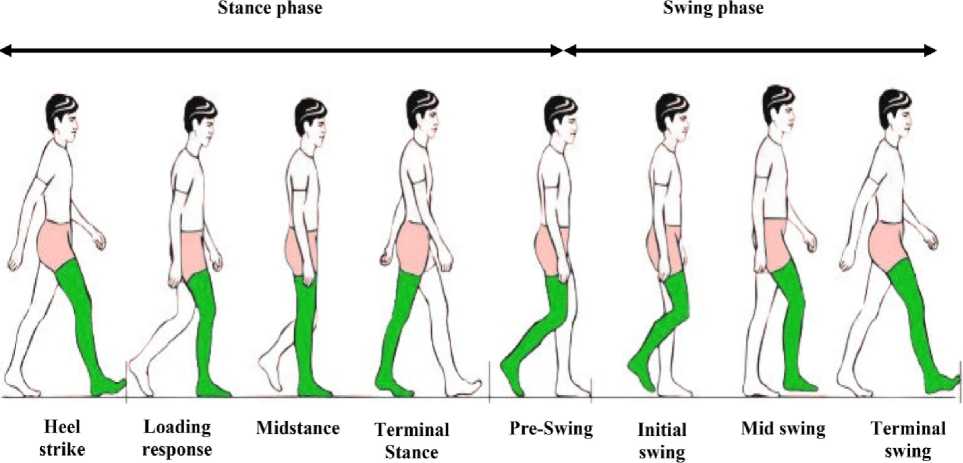
Рис. 2. Фазы ходьбы
Fig. 2. Gait phases
Passive knees
Healthy Problems
Required Functions
Manually locking mechanisms
Monocentnc ESF mechanrsms
Physical lock-axis mechanisms
Fnctional components
Hydraulic components
Hyperextension-controlled components ______
Swing Resistance
Required Function:
Stance Stability
Stance Flexion
Swing Resistance
Healthy Problem:
Fan
Osteoarthritis
Gait Asymmetry
Passive knees
Manually locking mechanisms Weight-activated mechanisms Polycentric mechanisms
HyperextensKm-ccnnoUed components Physical lock-axis mechanisms Monoceniric ESF mechanisms Frictianal components
Hydraulic components Pneumatic components
Integrated mechanisms
Polycentric mechanisms
Pneumatic components
Weight-activated mechanisms
Virtual lock-axis mechanisms
Polycentric ESF mechanisms

Сгибание в стойке
Проблемы со здоровьем
Остеоартрит
Асимметрии походки
Пассивные колени
Механизмы ручной блокировки Механизмы, активируемые весом Полицентрические механизмы Компоненты, отравляемые гиперэкстензией Физические механизмы блокировки оси Монопенгрические механизмы ESF фрикционные компоненты Гидравлические компоненты
Virtual lock-axis mechanisms
Механизмы виртуальной блокировки оси
Polvcentr.c ESF mechanism:
Рис. 3. Требуемые характеристики протеза коленного сустава в аспекте требуемых функций при ровной ходьбе [21]
Fig. 3. Essential characteristics of prosthetic knees for level walking and related functions [21]
Сгибание в стойке (Stance Flexion) – возможность поглощать удары в момент упоры области пятки у людей с ампутированными конечностями уровня K3 и K4. Утрата функции ампутированной конечности компенсируется неповрежденной стороной, которая имеет на 20 % большее время поддержки и поглощает в два раза больше ударов, что значительно повышает риск развития остеоартрита на здоровой ноге. Увеличение способности коленного протеза поглощать удары может эффективно снизить воздействие на суставы здоровой стороны у активных пользователей.
Сопротивление качанию (Swing Resistance) – фундаментальный принцип управления протеза, основанный на анатомии и функции коленного сустава. В настоящее время широко применяются 3 типа устройств: фрикционные, пневматические и гидравлические (рис. 4).
Одним из перспективных направлений развития протезирования являются протезы ног с микропроцессорным управлением (Microprocessor controlled prosthetic legs – MPCPL). Они обеспечивают лучшую функциональность, чем обычные протезы ног, поскольку в них используются приводы для замены недостающей функции суставов. Это потенциально снижает потребление метаболической энергии пользователя, что позволяет максимально приблизить ходьбу к нормальной биомеханике.
Важнейшей частью протезов MPCPL является протез коленного сустава, управляемый микропроцессором (Microprocessor controlled knee – MPK). MPK с использованием внешних датчиков и технических устройств позволяет автоматически регулировать характеристики демпфирования, что обеспечивает более широкий диапазон скорости передви-
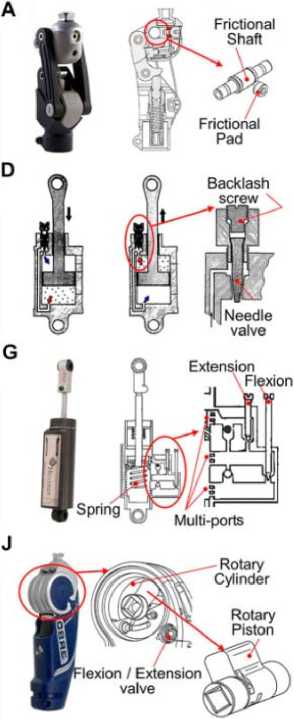
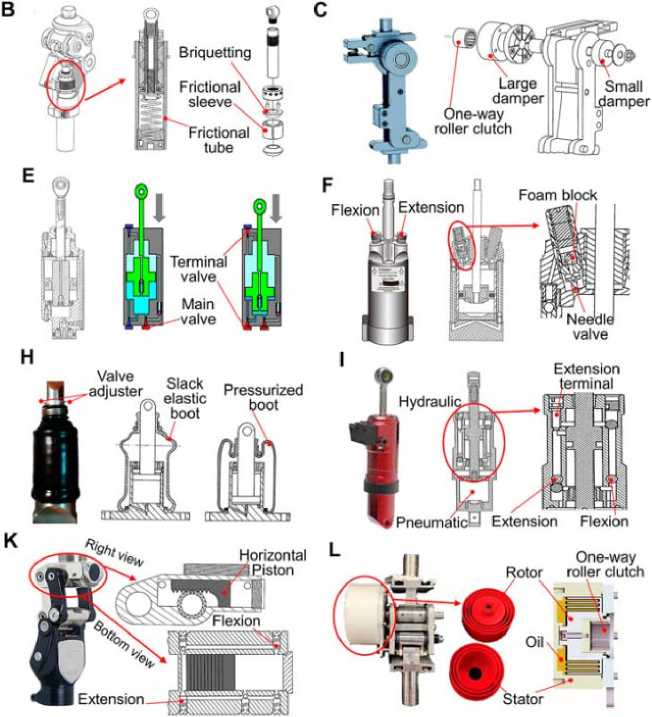
Рис. 4. Функциональные компоненты для сопротивления качанию (Swing Resistance) в пассивных коленях (Passive Knees) [21]: A – колено с фрикционными элементами, действующими на ось поворота, B – протез коленного сустава с цилиндрическими фрикционными элементами, C – протез коленного сустава с дифференциальной фрикционной системой, D – пневматический блок с регулируемым зазором в верхней части игольчатого клапана (колено UC-BL, E – пневматический блок с клапаном регулирования конечной фазы, F – автоматически регулируемый пневматический блок управления, G – гидравлический цилиндр с различным отверстием, H – гидравлический цилиндр с эластичным чехлом, I – гидравлический цилиндр с пневматической пружиной, J – гидравлический агрегат с поворотным поршнем, К – гидравлический агрегат с горизонтальным поршнем, L – гидравлический блок, использующий вязкое трение
Fig. 4. Functional components for swing resistance in passive knees [21]: A – knee with the frictional elements acting on the pivot axis, B – prosthetic knee with the cylindrical frictional elements, C – prosthetic knee with the differential frictional system, D – pneumatic unit with the adjustable backlash at the top of the needle valve (UC-BL knee), E – pneumatic unit with the terminal phase control valve, F – automatically adjusting pneumatic control unit, G – hydraulic cylinder with varying port, H – hydraulic cylinder with an elastic boot, I – hydraulic cylinder with air spring, J – hydraulic unit with a rotary piston, К – hydraulic unit with a horizontal piston, L – hydraulic unit that utilizes viscous friction
жения и повышенную стабильность. Кроме того, коленные протезы MPK могут использоваться на различных поверхностях, включая неровные дороги, лестницы и пандусы. В таблице представлены перспективные исследования создания управляемого протеза коленного сустава [29].
Разработка современных протезов нижних конечностей требует вовлеченности в НИР и НИОКР специалистов из различных областей науки. От исследовательской команды требуются знания об анатомии и биомеханике стопы для проектирования протеза стопы и коленного сустава, детальное представление об ускорениях, скоростях, реакции опоры и крутящих моментов в суставах во время цикла ходьбы. При конструировании необходимо учитывать степень нагрузки на здоровую конечность, симметрию походки и потенциальную возможность для людей с ампутированными конечностями вести нормальную общественную жизнь.
Таблица
Table
Перспективные исследования протеза коленного сустава
Advanced research on prosthetic knee joints
|
Авторы |
Ключевые результаты |
|
Tran M., 2019 [32] |
Создан легкий коленный протез с электроприводом, который обеспечивает необходимый крутящий момент и мощность для подъема по лестнице, а также для ходьбы по ровной земле |
|
Murabayashi M., 2022 [24] |
Разработан механизм, предотвращающий нежелательное сгибание во время фазы опоры |
|
Bartlet, H.L., 2022 [5] |
Вспомогательный протез увеличил максимальный угол сгибания колена в фазе переноса согласно изменяющейся скорости |
|
Guercini L., 2022 [14] |
Двойной моторный протез напоминал кинематику естественной походки во время ровной ходьбы и создавал необходимый крутящий момент во время перехода из положения сидя в положение стоя |
|
Sturk J.A., 2019 [31] |
Предоставлена всесторонняя оценка и сравнение различных адаптаций, развивающихся как у людей с трансфеморальной ампутированной конечностью, так и у здоровых людей на различных типах поверхностей |
|
Cao W., 2018 [8] |
I-KNEE был более устойчив к изменениям скорости, что показало лучшие характеристики в сравнении с протезами коленного сустава, управляемыми микропроцессором |
|
Lee J.T., 2020 [19] |
Проведена оценка протезов с инерцией и показаны их преимущества как в повседневной жизни, в том числе и при поворотах |
|
Murabayashi M., 2022 [23] |
Результаты экспериментов с походкой показали эффективность предложенного механизма для реализации беговых действий |
|
Lenzi T., 2018 [20] |
Представлено гибридное колено, обеспечивающее физиологический крутящий момент и мощность во время активного подъема по лестнице и пассивной ходьбы по земле |
|
Geng Y., 2022 [13] |
Созданная модель позволяет воспроизвести более симметричную модель ходьбы, что подтверждается данными подошвенного давления на стороне протеза, схожего с давлением на стороне здоровой конечности |
|
Wang, S., 2022 г. [33] |
Прототип позволил дифференцировать значение крутящего момента в различных фазах ходьбы |
|
Rahmi D., 2022 [28] |
Четырехрычажный пневматический протез коленного сустава показал снижение энергозатрат и увеличение скорости ходьбы по сравнению с механическим |
|
Hood S., 2022 [18] |
Контроллер поворотов позволил подниматься по лестнице с различной высотой, подстраивался под разнообразные модели походки, синхронизируя движения бедер |
|
Cortino R.J., 2022 [11] |
Контроллер позволил активным протезам коленного сустава выполнять механическую работу, необходимую для подъема по лестнице |
|
Hood S., 2022 [17] |
Исследование показало, что активные протезы коленного и голеностопного суставов приводят к улучшению движений и уровня жизни людей с двусторонней трансфеморальной ампутацией |
|
Azimi V., 2021 [4] |
Три разработанных контроллера обеспечивали отслеживание протеза колена при ходьбе по неровным поверхностям |
|
Cheng S., 2022 [10] |
Результаты моделирования показали адаптивную способность модели к ошибкам прогнозирования наклона и классификации режимов пользования протезом |
|
Hong W., 2019 [16] |
Система контроля позволила в режиме реального времени использовать трансфеморальный протез для устранения осложнений ходьбы по пандусу |
|
Andrysek J., 2020 [2] |
Необходимостью разгрузки колена для начала сгибания колена во время ходьбы обеспечивается увеличением фазы переноса тормозного колена |
|
Mazumder A., 2022 [22] |
Данные об угловых скоростях позволяют оценивать фазы походки, что позволяет пользователю согласовать свою реакцию с реакцией протеза |
|
Andrysek J., 2022 [3] |
Прототип улучшил различные модели походки, связанные с контролем фазы переноса, включая синхронизацию фазы поворота и пиковые углы сгибания колена |
|
Warner H., 2022 [34] |
Первый в мире протез с электроприводом, способный регенерировать электрическую энергию в протезном коленном суставе |
Окончание таблицы
Table (end)
|
Авторы |
Ключевые результаты |
|
Best T., 2022 [6] |
Прототип протеза с непрерывным адаптивным характером показал возможность подстраиваться под изменения характера движения человека |
|
Gupta R., 2019 [15] |
Предложенный подход к идентификации местности повысил эффективность системы управления протеза, что, в свою очередь, улучшило мобильность и качество жизни людей с ампутированными конечностями. |
|
Schulte R.V., 2022 [30] |
Прототип, в сравнении с существующими протезами, показал меньшее количество ошибок при прогнозировании крутящего момента |
|
Bittibssi T.M., 2022 [7] |
Предложена нейронная система для решения широкого спектра задач систем управления трансфеморальными протезами |
|
Zhang Y., 2019 [36] |
Результаты моделирования протеза коленного сустава с шестью стержнями подтвердили возможность реализации нормальной походки у пользователя |
|
Yang C., 2019 [35] |
Проведена оценка взаимного влияния различных параметров кинематики движения, показавшая свою эффективность для расчета угла коленного сустава при различных типах движений ног |
|
Chen X., 2022 [9] |
Создан метод, обеспечивающий высокую точность прогнозирования фаз походки в различных режимах ходьбы |
Список литературы Анализ перспективных направлений в проектировании протезов коленного сустава нового поколения
- A Body Parts. How the Prosthetics Market in Russia Took Off. Available at: https://www.rbc.ru/ industries/news/65377d919a7947c1f7a2dd21
- Andrysek J., García D., Rozbaczylo C. et al. Biomechanical Responses of Young Adults with Unilateral Transfemoral Amputation Using Two Types of Mechanical Stance Control Prosthetic knee Joints. Prosthet. Orthot. Int., 2020, no. 44, pp. 314–322. DOI: 10.1177/0309364620916385
- Andrysek J., Michelini A., Eshraghi A. et al. Gait Performance of Friction-Based Prosthetic Knee Joint Swing-Phase Controllers in Under-Resourced Settings. Prosthesis, 2022, no. 4, pp. 125–135. DOI: 10.3390/prosthesis4010013
- Azimi V., Shu T., Zhao H. et al. Model-Based Adaptive Control of Transfemoral Prostheses: Theory, Simulation, and Experiments. IEEE Trans. Syst. Man Cybern. Syst., 2021, no. 51, pp. 1174–1191. DOI: 10.1109/TSMC.2019.2896193
- Bartlett H.L., King S.T., Goldfarb M., Lawson B.E. Design and Assist-As-Needed Control of a Lightly Powered Prosthetic Knee. IEEE Trans. Med. Robot. Bionics, 2022, no. 4, pp. 490–501. DOI: 10.1109/TMRB.2022.3161068
- Best T., Welker C., Rouse E., Gregg R. Data-Driven Variable Impedance Control of a Powered Knee-Ankle Prosthesis for Adaptive Speed and Incline Walking. IEEE Trans. Robot., 2023, no. 39, pp. 2151–2169. DOI: 10.1109/TRO.2022.3226887
- Bittibssi T.M., Zekry A., Genedy M.A., Maged S.A. Implementation of Surface Electromyography Controlled Prosthetics Limb Based on Recurrent Neural Network. Concurr. Comput. Pract. Exp., 2022, no. 34, e6848. DOI: 10.1002/cpe.6848
- Cao W., Yu H., Zhao W. et al. The Comparison of Transfemoral Amputees Using Mechanical and Microprocessor- Controlled Prosthetic knee Under Different Walking Speeds: A Randomized Cross-over Trial. Technol. Health Care, 2018, no. 26, pp. 581–592. DOI: 10.3233/THC-171157
- Chen X., Chen C., Wang Y. et al. A Piecewise Monotonic Gait Phase Estimation Model for Controlling a Powered Transfemoral Prosthesis in Various Locomotion Modes. IEEE Robot. Autom. Lett., 2022, no. 7, pp. 9549–9556. DOI: 10.1109/LRA.2022.3191945
- Cheng S., Bolívar-Nieto E., Welker C.G., Gregg R.D. Modeling the Transitional Kinematics between Variable-Incline Walking and Stair Climbing. IEEE Trans. Med. Robot. Bionics, 2022, no. 4, pp. 840–851. DOI: 10.1109/TMRB.2022.3185405
- Cortino R.J., Bolívar-Nieto E., Best T.K., Gregg R.D. Stair Ascent Phase-Variable Control of a Powered Knee-Ankle Prosthesis. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 2022, pp. 5673–5678. DOI: 10.1109/ICRA46639.2022. 9811578
- Elgamsy R., Awad M.I., Ramadan N. et al. Localization of Composite Prosthetic Feet: Manufacturing Processes and Production Guidelines. Sci Rep, 2023, no. 13, 17421. DOI: 10.1038/s41598-023-44008-7
- Geng Y., Wu Z., Chen Y. et al. The Control Methods of Knee-Ankle-Toe Active Transfemoral Prosthesis in Stance Phase. Asian Journal Control., 2022, no. 25, pp. 976–988. DOI: 10.1002/asjc.2848
- Guercini L., Tessari F., Driessen J. et al. An Over-Actuated Bionic Knee Prosthesis: Modeling, Design and Preliminary Experimental Characterization. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 2022, pp. 5467–5473. DOI: 10.1109/ICRA46639.2022.9812197
- Gupta R., Agarwal R. Single Channel EMG-based Continuous Terrain Identification with Simple Classifier for Lower Limb Prosthesis. Biocybern. Biomed. Eng., 2019, no. 39, pp. 775–788. DOI: 10.1016/j.bbe.2019.07.002
- Hong W., Paredes V., Chao K. et al. Consolidated Control Framework to Control a Powered Transfemoral Prosthesis Over Inclined Terrain Conditions. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 2019, pp. 2838–2844. DOI: 10.1109/ICRA.2019.8794140
- Hood S., Creveling S., Gabert L. et al. Powered Knee and Ankle Prostheses Enable Natural Ambulation on Level Ground and Stairs for Individuals with Bilateral Above-knee Amputation: A Case Study. Science Rep., 2022, no. 12, 15465. DOI: 10.1038/s41598-022-19701-8
- Hood S., Gabert L., Lenzi T. Powered Knee and Ankle Prosthesis with Adaptive Control Enables Climbing Stairs With Different Stair Heights, Cadences, and Gait Patterns. IEEE Trans. Robot, 2022, no. 38, pp. 1430–1441. DOI: 10.1109/TRO.2022.3152134
- Lee J.T., Bartlett H.L., Goldfarb M. Design of a Semi-Powered Stance-Control Swing-Assist Transfemoral Prosthesis. IEEE ASME Trans. Mechatron., 2020, no. 25, pp. 175–184. DOI: 10.1109/TMECH.2019.2952084
- Lenzi T., Cempini M., Hargrove L., Kuiken T. Design, Development, and Testing of a Lightweight Hybrid Robotic knee Prosthesis. International Journal Robot. Research, 2018, no. 37, 027836491878599. DOI: 10.1177/0278364918785993
- Liang W., Qian Z., Chen W. et al. Mechanisms and Component Design of Prosthetic Knees: A Review from a Biomechanical Function Perspective. Front. Bioeng. Biotechnology, 2022, no. 10, 950110. DOI: 10.3389/fbioe.2022.950110
- Mazumder A., Hekman E.E.G., Carloni R. An Adaptive Hybrid Control Architecture for an Active Transfemoral Prosthesis. IEEE Access, 2022, no. 10, pp. 52008–52019. DOI: 10.1109/ACCESS.2022.3173348
- Murabayashi M., Inoue K. New Function and Passive Mechanism of Transfemoral Prosthetic knee for Running Safely. In Proceedings of the 2022 44th Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Glasgow, UK, 2022, no. 11–15, pp. 4334–4337. DOI: 10.1109/EMBC48229.2022.9870830
- Murabayashi M., Mitani T., Inoue K. Development and Evaluation of a Passive Mechanism for a Transfemoral Prosthetic Knee That Prevents Falls during Running Stance. Prosthesis, 2022, no. 4, pp. 172–183. DOI: 10.3390/prosthesis4020018
- Muscolino J.E. Kinesiology-E-Book: The Skeletal System and Muscle Function. Elsevier Health Sciences, 2010.
- Prosthetics & Orthotics Market Size & Share Analysis – Growth Trends & Fore-casts (2023–2028).
- Prosthetics and Orthotics Market by Type, End-user, and Geography – Forecast and Analysis 2023–2027.
- Using Mechanical Four-bar Linkage and Pneumatic System Prosthetic knee Joints. Journal Pros-thet. Orthot. Science Technology, 2022, no. 1, pp. 28–33. DOI: 10.36082/jpost.v1i1.647
- Rasheed F., Martin S., Tse K.M. Design, Kinematics and Gait Analysis, of Prosthetic Knee Joints: A Systematic Review. Bioengineering, 2023, no. 10 (7), p. 773. DOI: 10.3390/bioengineering10070773
- Schulte R.V., Zondag M., Buurke J.H., Prinsen E.C. Multi-Day EMG-Based Knee Joint Torque Estimation Using Hybrid Neuromusculoskeletal Modelling and Convolutional Neural Networks. Front. Robot. AI, 2022, no. 9, 869476. DOI: 10.3389/frobt.2022.869476
- Sturk J.A., Lemaire E.D., Sinitski E.H. et al. Maintaining Stable Transfemoral Amputee Gait on Level, Sloped and Simulated Uneven Conditions in a Virtual Environment. Disabil. Rehabilitation Assist. Technology, 2019, no. 14, pp. 226–235. DOI: 10.1080/17483107.2017.1420250
- Tran M., Gabert L., Cempini M., Lenzi T. A Lightweight, Efficient Fully Powered Knee Prosthesis with Actively Variable Transmission. IEEE Robot. Autom. Lett., 2019, no. 4, pp. 1186–1193. DOI: 10.1109/LRA.2019.2892204
- Wang S. Biomechanical Analysis of the Human Knee Joint. Journal Healthc. Eng., 2022, 9365362. DOI: 10.1155/2022/9365362
- Warner H., Khalaf P., Richter H. et al. Early Evaluation of a Powered Transfemoral Pros-thesis with Force-Modulated Impedance Control and Energy Regeneration. Med. Eng. Physiology, 2021, no. 100, 103744. DOI: 10.1016/j.medengphy.2021.103744
- Yang C., Xi X., Chen S. et al. SEMG-based Multi-features and Predictive Model for Knee-joint-angle Estimation. AIP Adv., 2019, no. 9, 095042. DOI: 10.1063/1.5120470
- Zhang Y., Liu S., Mo X. et al. Optimization and Dynamics of Six-bar Mechanism Bionic Knee. Proceedings of the 2019 WRC Symposium on Advanced Robotics and Automation (WRC SARA), Beijing, China, 2019, pp. 91–96. DOI: 10.1109/WRC-SARA.2019.8931941
