Анализ преимуществ реактивных электрических машин при построении гребной электрической установки

Автор: Самосейко Вениамин Францевич, Шарашкин Сергей Владимирович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электроэнергетика
Статья в выпуске: 2 т.17, 2017 года.
Бесплатный доступ
В работе рассмотрены различные типы гребных установок судов, приведены их основные достоинства и недостатки. Описаны достоинства системы полного электродвижения на базе электрического двигателя. Рассмотрены различные типы электрических машин, применяемых при построении систем электродвижения судов. Произведено обоснование выбора реактивной электрической машины в качестве приводного двигателя для гребной установки судов. Рассмотрены различные типы реактивных электродвигателей и перспективы использования их в гребных электроприводах судов, показаны возможные пути оптимизации характеристик двигателей (энергетические показатели, массогабаритные характеристики). Выполнен сравнительный анализ конструкций реактивных электрических машин и их конкурентных преимуществ между собой и классическими электрическими машинами, используемыми в электроприводе. Рассмотрены машины с различными конструкциями обмоток, показаны отношения продольной и поперечной индуктивностей различных типов двигателей, являющиеся критерием оценки качества конструкции. Подробно описаны машины с зубчатым статором и ротором, обоснована возможность их оптимизации по критерию минимума пульсаций электромагнитного момента. Приведено описание реактивных электрических машин с анизотропной магнитной проводимостью ротора с продольной и поперечной шихтовкой. Произведен анализ энергетических характеристик и массогабаритных показателей реактивных электрических машин.
Реактивные электрические машины, зубчатый ротор, продольно и поперечно шихтованный ротор, анизотропная магнитная проводимость ротора, системаэлектродвижения
Короткий адрес: https://sciup.org/147158396
IDR: 147158396 | УДК: 621 | DOI: 10.14529/power170202
Analysis of advantages of reactive electric machines in propulsion system construction
The work considers various types of ship propulsion systems, their main advantages and disadvantages are given below. The advantages of an electric propulsion system based on an electric motor are described in this work. Various types of electric machines used in the construction of ship electrical propulsion systems are also considered. The choice of the reactive electric machine in ship propulsion systems was made. Various types of reactive electric machines and prospects of their use in the electric drive are considered; possible ways of their optimization (energy indicators, mass-dimensional characteristics) are shown. A comparative analysis of the reactive electric machines designs and their competitive advantages between themselves and the classic electric machines used in the electric drive is performed. Machines with different winding designs are considered, the longitudinal and transverse inductance ratios of the various types of motors are shown, which are the criterion for assessing the structure quality. The machines with a gear stator and a rotor are described in detail, the possibility of their optimization is proved by the criterion of a minimum of pulsations of the electromagnetic moment. A description is given for a synchronous reluctance machine with anisotropic magnetic conductivity of a rotor with longitudinal and transverse blending. The analysis of the energy characteristics and mass-dimensional parameters of reactive electric machines was made.
Текст научной статьи Анализ преимуществ реактивных электрических машин при построении гребной электрической установки
В состав современного электропривода гребной электрической установки входит множество элементов, таких как: электродвигатель, вентильный коммутатор, датчики электрических и механических координат, микропроцессорная система управления и др. Применение тихоходных электрических двигателей позволяет отказаться от понижающих редукторов, без которых невозможно построение гребной электрической установки, приводимой в движение быстроходными главными двигателями. Важнейшим элементом судового электропривода является электродвигатель. Для реализации системы электродвижения чаще всего применяются асинхронные и синхронные электрические машины, принцип действия которых основан на пульсации взаимных индуктивностей обмоток статора и ротора.
Основными недостатками систем электродвижения являются увеличение габаритов и уменьшение коэффициента полезного действия, связанные с многократным преобразованием энер- гии, в сравнении с системами движения на основе тепловых двигателей, поэтому основными критериями выбора электродвигателя являются уменьшение массо-габаритных характеристик и улучшение энергетических показателей системы. Несмотря на это гребные электрические установки обладают возможностью обеспечения глубокого регулирования скорости и высокой перегрузочной способностью. Суда с системами электродвижения обладают высокой маневренностью, в особенности, когда системы построены на базе винторулевых колонок и двигательно-движительных комплексов типа Azipod. При этом реверс гребного винта осуществляется путем изменения напряжения, подаваемого на статорные обмотки без дополнительных механических устройств.
Развитие полупроводниковой преобразовательной техники привело к тому, что особое внимание разработчиков на сегодняшний день привлекают реактивные электрические машины, электромагнитный момент которых обусловлен пульсациями собственных индуктивностей обмоток статора. Такие машины имеют хорошие массогабаритные характеристики, высокие энергетические показатели и высокую надежность. Помимо этого ротор таких электрических машин не имеет обмоток и постоянных магнитов, поэтому он не нуждается в охлаждении и не создает аварийных ситуаций при необходимости резкого отключения питания двигателя. Важнейшими характеристиками электрических машин в судовом электроприводе являются габариты и надежность, а при построении гребных установок на базе системы Azipod – отведение тепла от ротора. Задачей настоящей статьи является выявление и анализ конкурентных преимуществ реактивных электродвигателей.
Возможны различные варианты построения гребных установок судов, каждые из них имеют свои достоинства и недостатки, ниже приведены некоторые из них (рис. 1).
На рис. 1а приведена схема гребной установки с быстроходным тепловым двигателем (дизельный двигатель, турбина). Такая система имеет ряд недостатков: длинный валопровод, необходимость регулирования скорости движения судна посредством винта регулируемого шага или редуктора с переменным передаточным числом, большая площадь машинного отделения. Винт регулируемого шага является сложной механической системой, нуждается в дополнительном обслуживании и уменьшает надежность системы движения.
На рис. 1б изображена комбинированная система движения, в которой главным является тепловой двигатель, а вспомогательным служит электродвигатель. На полном ходу судно приводится в движение тепловым двигателем, и регулирование скорости может осуществляться на 30 % вниз от номинала, поскольку дальнейшее понижение скорости ведет к значительному понижению энергетической эффективности установки. В швартовом режиме главный двигатель отключается и подключается электрический вспомогательный двигатель, который обеспечивает высокую маневренность и глубокое регулирование скорости без потери энергетической эффективности.
На рис. 1в приведена схема с полным электродвижением. Достоинствами такой системы являются: отсутствие длинного валопровода, уменьшение площади машинного отделения, отсутствие редуктора и винта регулируемого шага. При построении гребной электрической установки общий КПД системы уменьшается, но возможность глубокого регулирования скорости оправдывает применение такого типа установок на судах технического флота, судах ледового класса, военных кораблях и подводных лодках. Помимо этого применение электрических и механических накопителей позволяет выбирать главные двигатели меньшей мощности, а соответственно меньшего габарита.
В классических системах электродвижения применяются двигатели постоянного тока, асинхронные электродвигатели с короткозамкнутым ротором и синхронные электродвигатели с возбуждением от постоянных магнитов [1–5].
Двигатели постоянного тока имеют высокую перегрузочную способность, хорошие виброшу-мовые характеристики, а также простую систему управления, при этом недостатками таких двигателей являются высокие габариты и низкая надежность, обусловленная наличием щеточно-коллекторного механизма. Асинхронные двигатели достаточно надежны, имеют низкую рыночную
Тепловой двигатель
Электрический генератор
Редуктор
Тепловой двигатель
Редуктор
Электрический двигатель
Тепловой двигатель Электрический генератор
Электрический двигатель
в)
Рис. 1. Варианты построения гребных установок стоимость, обусловленную высокой технологичностью производства и высокой конкуренцией среди производителей. Недостатками такого типа машин являются низкие энергетические характеристики в сравнении с синхронными двигателями, необходимость отведения тепла от ротора, связанная с наличием роторных обмоток, а также приводящая к увеличению габарита за счет наличия системы охлаждения не только статора, но и ротора. Синхронные электродвигатели с постоянными магнитами на роторе обладают высокими энергетическими характеристиками, хорошими массогабаритными показателями. В то же время наличие постоянных магнитов на роторе приводит к невозможности снятия магнитного поля, что вызывает повышенную аварийную опасность в режиме аварийного торможения. Помимо вышесказанного, двигатели с возбуждением от постоянных магнитов чувствительны к высоким электромагнитным полям и нуждаются в обеспечении защиты от металлической пыли.
Обмотки статора реактивной машины
Согласно [6], реактивный двигатель – это синхронный двигатель, вращающий момент которого обусловлен неравенством магнитных проводимостей по поперечной и продольной осям ротора, не имеющего обмоток возбуждения или постоянных магнитов. Основной особенностью реактивных электрических машин является то, что на роторе отсутствуют электрические обмотки.
Существуют различные конструкции статорных обмоток машин. У электрических машин типа LL пульсируют собственные фазные индуктивности обмоток, машины типа LM отличаются тем, что электромагнитный момент в них обусловлен пульсацией взаимных и собственных индуктивностей статорных обмоток. Теоретически возможно создание машин типа MM , в которых пульсирует только взаимные индуктивности, но такие машины не получили распространение ввиду низкой энергетической эффективности.
В машинах типа LL фазные обмотки имеют двухсекционное исполнение, c сильно укороченным шагом, такая конфигурация обеспечивает отсутствие взаимных индуктивностей фазных обмоток. В машинах типа LM обмотки идентичны статорным обмоткам синхронных и асинхронных электрических машин.
В реактивных электродвигателях величина электромагнитного момента обусловлена размахом пульсации индуктивности статорных обмоток. Качество конструкции реактивных электрических машин оценивается отношением максимальной (продольной) индуктивности L d к минимальной (поперечной) L q .
При использовании различных конструкций ротора можно добиться пульсаций индуктивности статорных обмоток. Известны два варианта по- строения ротора реактивных электрических машин. Первый обеспечивается зубчатой формой статора и ротора, второй – преданием материалу ротора формы, обеспечивающей анизотропную магнитную проводимость.
Машины с зубчатым ротором, чаще всего, имеют обмотки типа LL и зубчатую форму основания цилиндра ротора. У машин данного типа отношение продольной и поперечной индуктивностей L d / L q менее 10. Машины с обмотками статора типа LM также могут иметь зубчатый ротор. Синхронные машины с такой конструкцией известны давно. Отношение индуктивностей L d / L q у таких машин не превосходит 2. Из-за низкого значения отношения Ld / Lq машины данного типа не получили распространения.
Машины с обмоткой статора типа LM целесообразно использовать в совокупности с ротором, имеющим анизотропную магнитную проводимость. Отношение индуктивностей в этом случае достигает, в зависимости от способа достижения магнитной анизотропии ротора, значений Ld / Lq ≈ 6…18.
Реактивные машиныс зубчатым ротором и статором
Поскольку машины с зубчатым ротором чаще всего имеют сосредоточенные обмотки типа LL , форма статора также имеет зубчатую форму (рис. 2).
Такие машины давно известны как шаговые двигатели, и ранее применялись в качестве исполнительных двигателей дискретного действия небольшой мощности, ротор которых поворачивался при подаче на фазную обмотку импульса электрической энергии. В восьмидесятых годах двадцатого столетия с развитием силовой электроники машины типа LL получили вторую жизнь. Двигатели такого типа, как правило, имеют импульсное питание статорных обмоток от вентильного коммутатора, и в отечественной литературе называются вентильно-индукторными [7].
По фазным обмоткам вентильно-индукторных машин протекают пульсирующие прерывистые токи. При разложении статорных токов в полигар-монический ряд Фурье и представлении индуктивностей обмоток в виде синусоидальных функций с постоянной составляющей, видно, что постоянная составляющая электромагнитного момента обусловлена гармониками 0, 1 и 2 порядков [8–11].
Машины с зубчатым статором и ротором, питаемые токами синусоидальной формы с постоянной составляющей, будем называть индукторными и обозначать LL -02. Реактивными будем называть машины, которые требуют для питания чисто синусоидальных токов (тип LL -01). Таким образом, необходимо формировать конструкцию ротора так, чтобы пульсации индуктивностей статорных обмоток и токи, протекающие по обмоткам, имели
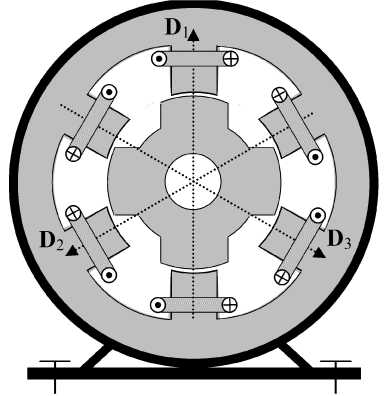
Рис. 2. Магнитопровод реактивной 2-полюсной машины типа LL
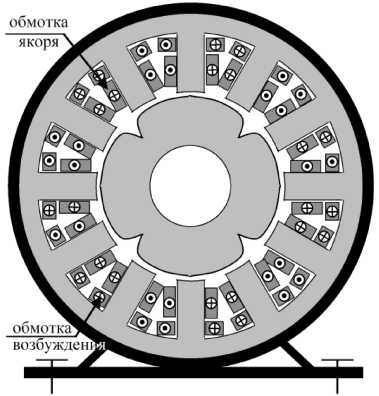
Рис. 3. Пример магнитопровода машины типа LL- 02 с пульсирующими по синусоидальному закону индуктивностями
синусоидальную форму. Высшие гармоники токов вызывают лишь пульсации электромагнитного момента.
Для достижения синусоидальной формы пульсаций индуктивностей обмоток статора используют два технических решения: предание зубцам ротора специальной формы и обеспечение аксиального скоса зубцов ротора по отношению к статору. В работах [12–14] описана форма ротора, которая позволяет получить идеально синусоидальный характер пульсации индуктивности обмоток статора (рис. 3).
Статорная обмотка реактивной электрической машины может быть разделена на две части. Первая обмотка в этом случае получает питание от источника постоянного тока и называется обмоткой возбуждения, вторая обмотка питается синусоидальным напряжением (обмотка якоря). Такие машины могут применяться в качестве генератора переменного напряжения. При этом обмотка постоянного тока аналогична обмотке возбуждения синхронного генератора, а обмотка переменного тока аналогична обмотке якоря.
При написании уравнения амплитуд напряжений реактивной электрической машины можно выделить индуктивность продольного LD и поперечного L Q контуров якоря. Индуктивности продольного и поперечного контуров связаны с индуктивностями обмоток следующими соотношениями:
т _ 3 L d + L q T _L d + 3 L q
L D = 4 ; L Q = 4 .
Отношение индуктивностей контуров ^ = = LD/LQ < 3. Оно определяет электрические свойства реактивной машины с зубчатым роторам и статором. Достаточно малое отношение LD/LQ обуславливает низкий коэффициент мощности машины. Управление напряжением питания обмоток машин типа LL-02 и LL-11 может быть реализовано посредством классического преобразователя частоты.
Реактивные машины с анизотропной магнитной проводимостью ротора
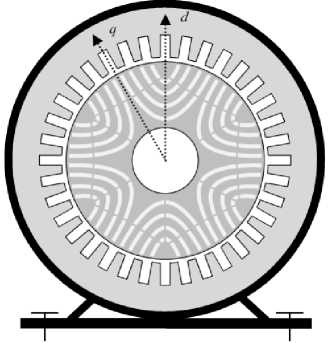
В машинах типа LM основание цилиндра ротора имеет круглую форму, пульсации статорных обмоток обусловлены анизотропией магнитных свойств ротора. Для достижения анизотропной магнитной проводимости ротора применяются два конструктивных решения [15–19].
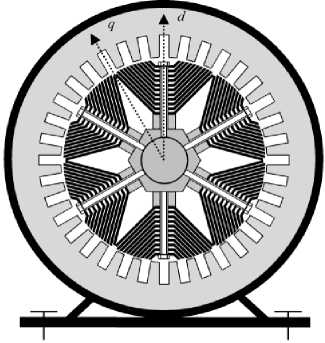
Первым решением является обеспечение поперечной шихтовки ротора листами электротехнической стали с вырезами, которые формируют магнитные полюса (машина типа LM-TL ) (рис. 4а). Вторым решением является обеспечение продольной шихтовки ротора (машина типа LM-АL ) (рис. 4б).
Отношение индуктивности L d к Lq ( £ = L d / L q = = LD / L Q ) у машин с продольной и поперечной шихтовкой отличается. Для машин типа LM-TL ^ « 6 ^ 7, типа LM-AL ^ ® 14 ^ 18, что говорит о преимуществе машин с продольной шихтовкой над машинами с поперечной шихтовкой.
Управление напряжением питания обмоток машин типа LM-TL и LM-AL может быть реализовано посредством преобразователя частоты.
Существуют два направления совершенствования реактивных электрических машин с анизотропной магнитной проводимостью ротора с продольной шихтовкой: улучшение энергетических характеристик, улучшение массогабаритных характеристик (рис. 5).
При оптимизации массогабаритных характеристик возможно уменьшение габаритов машины на 25 % в сравнении с классическим асинхронным двигателем с короткозамкнутым ротором. При оптимизации энергетических характеристик, при со-
а)
Рис. 4. Магнитопровод 6-полюсных машин типов LM-TL и LM-AL
б)
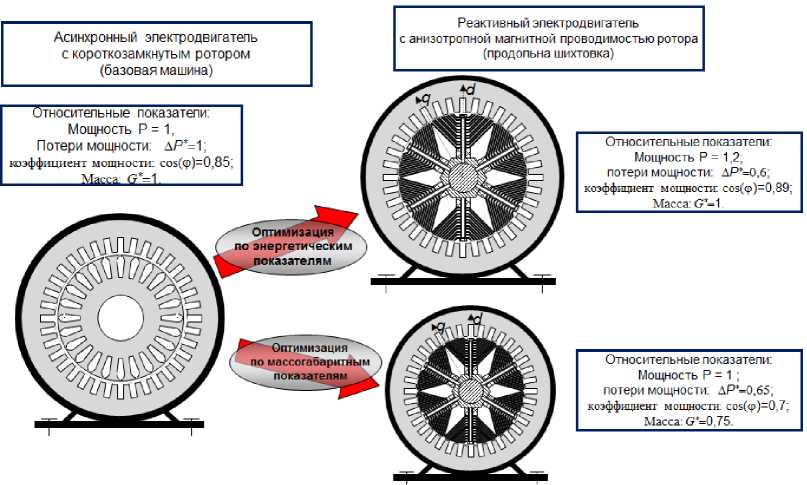
Рис. 5. Направления совершенствования реактивной электрической машины с анизотропной магнитной проводимостью ротора
хранении того же габарита, возможно увеличение мощности машины на 20 %.
При реализации системы электродвижения на базе винто-рулевой колонки типа Azipod важнейшим фактором является отведение тепла от ротора машины, поскольку система охлаждения значительно усложняет конструкцию движителя.
Энергетические характеристики реактивных машин
Коэффициент мощности и КПД являются основными характеристиками электрических машин, они характеризуют энергетическую эффективность. Соотношение LD/LQ в значительной степени влияет на коэффициент мощности реактивных электрических машин [13]. В связи с этим машины с поперечный шихтовкой (LM-TL) имеют доста- точно высокий коэффициент мощности, который превосходит этот показатель в машинах LL, но уступает машинам типа LM-AL.
В машинах типа LM-AL коэффициент мощности превосходит этот показатель во всех других типах электрических машин переменного тока, этот факт подтверждается расчётами и экспериментальными исследованиями [13].
Известно, что максимум показателя энергетической эффективности реактивной машины достигается при равенстве токов намагничивания и нагрузки. Так как машины типа LL работают с низким коэффициентом мощности, то их показатель энергетической эффективности достаточно высок. Низкий уровень потерь мощности у этих машин обусловлен также короткими лобовыми частями обмотки.
Машины типа LM не имеют потерь в роторе. Поэтому они существенно выигрывают по этому показателю у асинхронных электродвигателей. Электрические потери в обмотках асинхронных двигателей на 80–95 % выше, чем потери в обмотках реактивных машин с анизотропной магнитной проводимостью в роторе. Поэтому коэффициент полезного действия реактивных машин типа LM существенно выше, чем асинхронных. Математическое обоснование приведено ниже.
Известно, что электрические потери в асинхронном электродвигателе можно определить по формуле:
A P АД = A P с + A P р = Г ( i d 2 + i q 2 ) + Г i q 2 , где A PC = r 1 ( i d 2 + i q 2 ) - электрические потери в статоре; A Pp = r 2 i q 2 - электрические потери в роторе.
Электрические потери в реактивной машине могут быть записаны аналогичным образом:
A P рд = A P с = Г 1 ( i d 2 + i q 2).
A P АД
Отношение характеризует улучшение
APРД энергетических характеристик реактивного электродвигателя в сравнении с асинхронным. Рассмотрим подробно это соотношение:
A P АД r 1 ( i d 2 + i q 2) + r2 i q 2 , r 2 i q 2
------ = --------й----й----- = 1 +--й---- V .
A P РД Г 1 ( i d 2 + i q 2 ) Г 1 ( i d 2 + i q 2 )
Учитывая, что сопротивление статорных обмоток приблизительно равно сопротивлению роторных обмоток r1 ® r2, выражение может быть приведено к следующему виду:
APa = 1 + .
A P РД ( i d + i q )
При проектировании электрических машин в качестве исходных данных принимают значение угла токовой нагрузки в номинальном режиме [13], который может быть представлен в следующем виде:
в = arctan
Г
vV L Q, L D
Тангенс угла токовой нагрузки определяется как отношение токов tan (в) = —.
id
Отсюда следует, что
Л 7 ад = 1 + Jan(p )^
A P РД tan ( в ) 2 + 1
На рис. 6 приведена зависимость отношения
APАД L от отношения D .
A PРД LQ
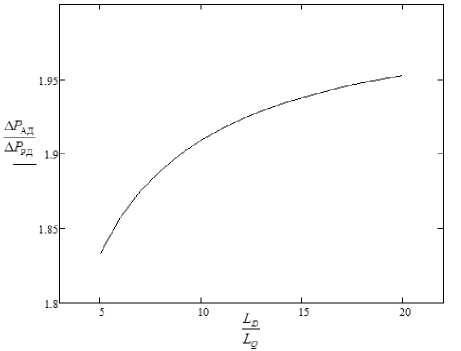
Рис. 6. Зависимость отношения Δ P АД Δ P РД от отношения L D L Q
Исходя из приведенной зависимости, можно сделать заключение, что КПД у реактивного электродвигателя с анизотропной магнитной проводимостью ротора существенно выше, чем у асинхронного двигателя.
Заключение
Реактивные электрические машины обладают рядом конкурентных преимуществ при построении гребных электрических установок, основным из которых является простота конструкции.
Надежность . Простота конструкции обеспечивает реактивной машине высокую безотказность. Второй фактор надежности – пассивный ротор. Реактивные машины не содержат постоянных магнитов ни на роторе, ни на статоре. В машине с постоянными магнитами необходима защита от металлической пыли. Они боятся сильных электромагнитных полей и перегрева. Диапазон рабочих температур машины с постоянными магнитами ограничен. В случае короткого замыкания обмотки, отключение машины с постоянными магнитами от сети не устраняет проблему нагрева обмотки токами короткого замыкания. Машина в этом случае превращается в самовозгорающийся объект. Реактивные машины не имеют всех этих недостатков. Пассивный ротор реактивной машины не является источником неисправностей, обусловленных электромагнитными процессами. Для устранения токов короткого замыкания достаточно отключить обмотку от сети.
Технологичность изготовления. Простота конструкции реактивной машины определяет трудоемкость ее изготовления. Простота обмотки статора обуславливает возможность применения машинного производства. В реактивной машине отсутствуют постоянные магниты, усложняющие технологию производства, стоимость и надежность.
Стоимость реактивной машины определяется простотой ее конструкции и технологичностью изготовления и является самой низкой из всех известных конструкций электрических машин.
Тепловыделение происходит в основном только на статоре, при этом легко обеспечивается воздушное или жидкостное охлаждение. Охлаждение ротора не требуется.
Массогабаритные показатели. Реактивные машины типа LL по массогабаритным показателям уступают другим машинам переменного тока, габарит реактивной электрической машины с зубчатым статором и ротором в 1,5–2 раза выше габарита классического асинхронного двигателя с короткозамкнутым ротором.
Реактивные машины с анизотропной магнитной проводимостью ротора не уступают по массогабаритным характеристикам машинам с возбуждением от постоянных магнитов.
Энергетические характеристики. Снижение энергетических потерь в реактивных электрических машинах обусловлено отсутствием обмоток на роторе.
У машин с зубчатым статором и ротором коэффициент мощности, как правило, не превышает значение 0,5. Машины с продольной шихтовкой превосходят асинхронный двигатель с короткозамкнутым ротором по коэффициенту мощности.
Управление электромеханическими процессами. Управление реактивной электрической машиной осуществляется классическим преобразователем частоты. Для формирования электромагнитного момента могут быть использованы алгоритмы управления с минимальными электрическими потерями на единицу момента и управление с максимальным быстродействием.
Быстродействие управления моментом реактивных машин определяется поперечным контуром. У машин типа LM-AL постоянная времени поперечного контура достаточно мала, что позволяет синтезировать алгоритмы управления с высоким быстродействием управления моментом. У машин типа LL большого быстродействия управления моментом поперечный контур имеет относительно большую постоянную времени и соответственно низкое быстродействие управления моментом.
Момент инерции ротора машин типа LM-AL сравнительно мал, что повышает быстродействие механической части приводов.
Область применения. Реактивные электрические машины могут применяться в регулируемом электроприводе с высокими требованиями к надежности и условиям эксплуатации. Машины с зубчатым статором и ротором могут использоваться в качестве генераторов электрической энергии, а также при обеспечении специальной формы ротора, такие машины могут применяться в малошумном электроприводе.
Синхронные машины с анизотропной магнитной проводимостью ротора с демпферной (пусковой) обмоткой допускают прямой пуск. Пусковая обмотка с продольным и поперечным короткозамкнутым контуром на роторе обеспечивает условия втягивания в синхронизм и устойчивую ра- боту в синхронном режиме. После втягивания в синхронизм пусковая обмотка машины не принимает участия в работе.
Таким образом, установка на ротор продольного и поперечного замкнутого накоротко контура позволяет производить прямой пуск таких электродвигателей, что создает перспективы их широкого использования взамен асинхронных электродвигателей. Однако основным конкурентным преимуществом реактивных машин с анизотропной магнитной проводимостью ротора, обеспечивающих их продвижение на рынок, является высокий коэффициент полезного действия, существенно превосходящий этот показатель асинхронных машин.
Реактивные электрические машины с анизотропной магнитной проводимостью ротора имеют высокие энергетические характеристики и низкие массогабаритные показатели, помимо этого пассивный ротор реактивных двигателей не нуждается в охлаждении и не создает аварийных ситуаций при необходимости остановки привода. Такие машины являются наиболее перспективными при построении систем электродвижения судов.
Список литературы Анализ преимуществ реактивных электрических машин при построении гребной электрической установки
- Преобразователь частоты для гребного электродвигателя/Г.М. Мустафа, С.В. Волков, А.А. Ершов и др.//Электротехника. -2014. -№ 1. -С. 46-53.
- Хватов, О.С. Гребная электрическая установка колесного судна/О.С. Хватов, Е.М. Бурда, Г.И. Коробко//Конгресс Международного форума «Великие реки». -2014. -С. 223-227.
- Ананьев, С.С. Асинхронный электропривод с улучшенными виброакустическими показателями/С.С. Ананьев, А.Н. Голубев//Электричество. -2008. -№ 8. -С. 52-56.
- Григорьев, А.В. Судовая система электродвижения нового поколения/А.В. Григорьев//Морской флот. -2012. -№ 2. -С. 38-40.
- Васин, И.М. Особенности создания гребного автоматизированного электропривода для судов с электродвижением ледового класса/И.М. Васин//Труды VIII международной (XIX всероссийской) конференции по автоматизированному электроприводу АЭП-2014. -2014. -С. 458-462.
- ГОСТ 27471-87 (Машины электрические вращающиеся. Термины и определения).
- Корнева, А.М. Реактивные электрические машины в электроприводе/А.М. Корнева, С.В. Шарашкин//Материалы VII межвузовской научно-практической конференции аспирантов, студентов и курсантов «Современные тенденции и перспективы развития водного транспорта России» 18 мая 2016 года. -СПб.: Изд-во ГУМРФ им. адм. С.О. Макарова, 2016. -С. 158-161.
- Skvarenina, T. The Power Electronics Handbook/T. Skvarenina. -CRC Press, 2002 DOI: 10.1201/9781420037067
- Liang, J.N. DITC of SRM Drive System Using 4-Level Converter/J.N. Liang, Z.G. Lee, D.H. Lee, J.W. Ahn.//Proceedings of ICEMS. -2006. -Vol. 1. -P. 21-23.
- Boldea, I. Linear electric actuators and generators/I. Boldea, S.A. Nasar. -Cambridge Univ. Press, 1997 DOI: 10.1017/CBO9780511529641
- Liang, J.N. Novel active boost power converter for SR drive/J.N. Liang, S.H. Seok, D.H. Lee, J.W. Ahn//International Conference on Electrical Machines and Systems. -2008. -P. 3347-3352.
- Шарашкин, С.В. Применение синхронного реактивного двигателя с лепестковым ротором в малошумных судовых электроприводах/С.В. Шарашкин//Конференция молодых ученых и специалистов 2016: тез. докл. -СПб.: Крыловский государственный научный центр, 2016. -С. 130.
- Реактивные электрические машины с зубчатым статором и ротором. Методика проектирования. Алгоритмы управления/В.Ф. Самосейко, Ф.А. Гельвер, В.А. Хомяк, Н.А. Лазаревский; под ред. В.Ф. Самосейко. -СПб.: Изд. Крыловский государственный научный центр, 2016. -197 с.
- Самосейко, В.Ф. К теории индуктивных явнополюсных электрических машин/В.Ф. Самосейко//Электричество. -2009. -№ 11. -С. 38-47.
- Ahn, J.W. A three-phase switched reluctance motor with two-phase excitation. Industry Applications/J.W. Ahn, Se.G. Oh, J.W. Moon, Y.M. Hwang//IEEE Transactions on. -1999. -Vol. 35, iss. 5. -P. 1067-1075 DOI: 10.1109/28.793367
- Chiba, A. Principles and Characteristics of a Reluctance Motor with Windings of Magnetic Bearing/A. Chiba, K. Chida and T. Fukao//Proc. PEC Tokyo. -1990. -P. 919-926.
- Ahn, J.W. Torque Control Strategy for High Performance SR Drive/J.W. Ahn//Journal of Electrical Engineering &Technology (JEET). -2008. -Vol. 3, no. 4. -P. 538-545 DOI: 10.5370/JEET.2008.3.4.538
- Krishnan, R. Switched Reluctance Motor Drives: Modeling, Simulation, Analysis, Design, and Applications/R. Krishnan. -CRC Press, 2001 DOI: 10.1201/9781420041644
- Husain, I. Torque Ripple Minimization in Switched Reluctance Motor Drives/I. Husain//IEEE Trans. On Industrial Electronics. -2002. -Vol. 49, no. 1. -P. 28-39 DOI: 10.1109/41.982245
