Анализ процесса развертывания окололунной тросовой системы с учетом притяжения Земли

Автор: Т.А. Ледкова, Ю.М. Заболотнов
Журнал: Космические аппараты и технологии.
Рубрика: Ракетно-космическая техника
Статья в выпуске: 3, 2021 года.
Бесплатный доступ
Разработка транспортных космических систем для доставки грузов и исследования поверхности Луны является важной научно-технической задачей. В работе рассматривается окололунная космическая тросовая система, состоящая из станции и микроспутника. Станция рассматривается как твердое тело, имеющее форму цилиндра, а микроспутник – как сферическое твердое тело. Трос рассматривается как невесомый нерастяжимый стержень переменной длины. Станция движется по окололунной орбите, на которую оказывает влияние притяжение Земли. Рассматривается процесс развертывания радиально направленной окололунной тросовой системы. Уравнения движения космической тросовой системы получены с помощью второго закона Ньютона и теоремы об изменении момента количества движения. Для выпуска троса и приведения орбитальной тросовой системы в рабочее состояние в статье предлагается использовать программу управления силой натяжения троса, которая обеспечивает развертывание тросовой системы в положение, близкое к вертикальному. Проводится сравнение движения тросовой системы по невозмущенной окололунной орбите и по возмущенной, учитывающей гравитационное влияние Земли. Для обоснования теоретических результатов проведено численное моделирование, по результатам которого сделан вывод о влиянии притяжения Земли на амплитуду колебаний микроспутника относительно местной вертикали.
Космическая тросовая система, космическая станция, микроспутник, окололунная орбита, развертывание тросовой системы, программа управления
Короткий адрес: https://sciup.org/14119648
IDR: 14119648 | УДК: 531.395 | DOI: 10.26732/j.st.2021.3.04
Analysis of the process of deployment of a lunar tether system taking into account the Earth's gravity
The development of space transport systems for the delivery of payloads and the study of the lunar surface is an important scientific and technical challenge. The article considers a near-lunar space tether system consisting of a station and a microsatellite. The station is considered as a rigid body having a cylindrical shape, and the microsatellite is considered as a spherical rigid body. The tether is considered as a weightless inextensible rod of variable length. The station moves in a near-lunar orbit, which is influenced by the Earth's gravity. The process of deployment of a radially directed near-lunar tether system is considered. The equations of motion of the space tether system are obtained using Newton's second law and the theorem on the change in the angular momentum. To release the tether and bring the orbital tether system to a working state, the article proposes to use the control program of tethers tension force, which ensures the deployment of the tether system to a position close to the vertical. A comparison of the motion of the tether system along the unperturbed lunar orbit and along the perturbed one, taking into account the gravitational influence of the Earth, is made. To substantiate the theoretical results, a numerical simulation was carried out, based on the results of which a conclusion was made about the influence of the Earth's gravity on the amplitude of oscillations of the microsatellite relative to the local vertical.
Текст статьи Анализ процесса развертывания окололунной тросовой системы с учетом притяжения Земли
Актуальность исследований динамики и разработка законов управления движением тросовых спутниковых группировок объясняется возможностью создания космических систем, состоящих из нескольких малых космических аппаратов, соединенных тросами. При этом входящие в группировку аппараты совершают согласованный полет. Такая система обладает легкостью и большим разнообразием конфигураций, и может применяться в задачах исследования космического пространства, планет и т. п. Обзор применения космических тросовых систем приведен в работах [1; 2].
Многие проекты освоения Луны и Марса предполагают использование космической стан-
Исследование выполнено при финансовой поддержке РФФИ и Государственного фонда естественных наук Китая в рамках научного проекта № 21-51-53002.
ции на окололунной орбите [3–6]. Она может служить космическим портом на орбите Луны, который сможет обеспечить жизнеобеспечение длительных экспедиций на поверхности Луны, а также станет отправной точкой для исследования глубокого космоса.
В работе рассматривается развертывание радиальной космической тросовой системы, состоящей из космической станции и малого космического аппарата, на окололунной орбите с учетом притяжения Земли (рис. 1).
Развертывание производится по закону управления, который обеспечивает развертывание троса на заданную длину при небольших отклонениях от вертикального положения. Приводится сравнение процесса развертывания при наличии притяжения Земли и без его учета.
1. Математическая модель
Рассматриваемая в работе механическая система представлена на рис. 2. Она состоит из кос-

1оСМ1ЛЧЕск|ЛЕ АППАРАТЫ И технологии двиган
Том 5
мической станции D и малого космического аппарата B , который прикреплен к станции невесомым нерастяжимым тросом длины lb . Станцию будем считать цилиндром, масса которого md , длина d , радиус ρ d . Спутник рассмотрим как шар, масса которого mb , радиус ρ b . На рис. 2 v – угол истинной аномалии станции; θ – угол истинной аномалии Луны; β – угол отклонения центральной оси спутника В от локальной вертикали; φ – угол отклонения троса, соединяющего станцию и спутник, от оси симметрии спутника; δ – угол отклонения оси симметрии станции от троса в месте его кре-
пления к станции; rb – радиус орбиты спутника B . Станция движется по окололунной возмущенной орбите радиуса rd .
С помощью второго закона Ньютона и теоремы об изменении кинетического момента запишем уравнения движения [7]:
т ь Г, = - T + G m + G b , m d Y d = - T + G m + G d ,
Jb to, = to, x J, to, - r, x T - M mm - M ^, (1)
Jd to d = to d x Jd to d - rd x T - M m - M d, где Gm =-mbцmrb |rb |-3, Ge = -mbцerb |rb |"3,
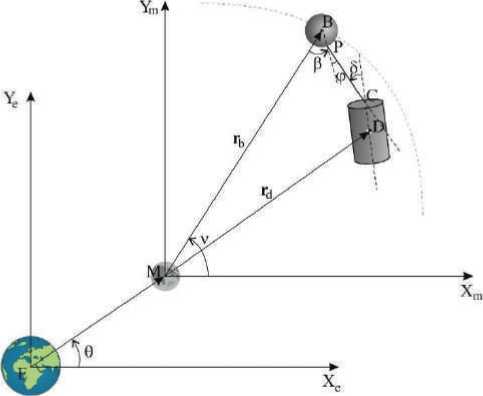
Рис. 1. Радиальная окололунная тросовая система
G m = — m d M Mdd 1 r d 1 - 3 , G d = — m d H E r d 1 r d 1 - 3 — векторы сил притяжения Луны (с индексом m ) и Земли (c индексом e ), действующие на спутник B и станцию D , соответственно; T = { T sin(P + ф), -T cos(p + ф), 0 } , T = - T - векторы силы натяжения троса, €0 b = { 0,0, v + p } T , CD d = { 0,0, v + Р + Ф + 8 } - угловые скорости спутника B и станции D относительно центра масс механической системы; матрицы моментов инерции спутника B и станции D :
b
( J bx
I 0
Jby 0
0 , Jd = 0
Jbz J I 0
0 0 ^
Jdy 0
dz J
Радиус-векторы, задающие положение станции и спутника в орбитальной системе координат:
r d
cos vI pb sin P + lb (P + Ф) + - sin(p + Ф + 5) I- sin v I Гь - pb cos P - lb cos(p + Ф) - - cos(p + Ф + 5
V 2 / X 2 .
sin v | p^ sin P + lb (P + ф) + — sin(P + ф + 5) | + cos v I rb - p6 cos P - lb cos(P + ф) - — cos(P + ф + 5
r6 ={rb cos v, rb sin v,0}r.
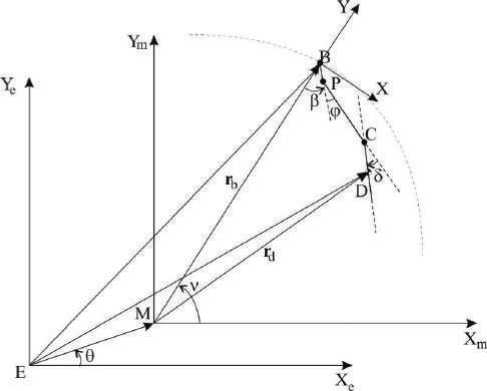
Рис. 2. Механическая система
Гравитационные моменты, действующие на спутник B и станцию D , обусловленные притяжением Луны, в общем виде записываются как [8]:
'3цM (Jbz - Jby)MByMBz 3ЦM (Jbx - Jbz)MBzMBx 3ЦM (Jby m m =I
I k b Г ’ k b Г ’
- J bx ) MB z MB y '
I r b Г ,
Mm _ J 3 Ц M ( Jdz - Jdy ) MD y MD z 3 ц M ( J .
M d = I I 13 ’
Положение Луны относительно Земли задается вектором:
P M cos 6 , P M sin 6 ,0 I ,
1 + eM cos 6 1 + eM cos 6
где e , ρ – эксцентриситет и фокальный параметр орбиты Луны. Движение Луны вокруг Земли описывается уравнением [9]:
°=A ^E" ( 1 + e M cos 6 ) 2, V p m
где µ – гравитационный параметр Земли.
Запишем в общем виде выражения гравитационного момента, действующего на спутник B и станцию D и обусловленного притяжением Земли:
|
m b =< |
'3 ц E ( Jbz - J by ) EB y EB z 3 ц E ( J bx - Jte) EB z EB x 3 ц e ( Jby - J b X ) EB z EB y' 1 k b l3 ’ k b l3 ’ k b Г 1 |
3 ц E ( J* — J dy ) ED y ED z 3 ц E ( Jdx - J dz ) ED z ED x 3 ц e ( J dy - Jd x ) ED z ED y
I rd Г ’ kd Г ’ kd Г где векторы EB = EM + rb, ED = EM + rd.
Из первого уравнения системы (1) выразим силу натяжения троса:
T = 8 m - - 7 I ( 1 + e M cos 6 ) | V rb + 1 V rb l (( - 4 e M r P M sin (v - 26 ) - 8 r b P M sin (v - 26 ) +
+ 2 e 2 r 2 cos 26 + 8 e..r2 cos 6 - 4 er p sin v + ( 2 e2 + 4) r 2 + 4p2 )/(1 + eM cos 6 ) 2 )2 +
Mb Mb Mb M M b MM
+ ц E p M ( cos v cos 6 + sin v sin 6 )]/
( -4 er pM sin (v - 26 )-8 r p^ sin (v - 6 ) + 2 e 2, r2 cos26 + 8 erK2 cos 6 - 4 er ры sinv + (2 e2 + 4) r2 + 4p2 ^2 Mb M b M Mb Mb Mb M M bM
< (1 + eM cos 6 )2
ub = ( l b max l b ) Г 1 v - ( р + ф + 5 ) J b _) . (3)
b max V bb max /
Выражая из (3) lb и дифференцируя по t , получим:

V
7 Л •
v
L 2
1 b max V
Р + Ф l b l b max
). ( lb max - lb ) f v ( P + ф ) lb ( Р + Ф ) ^^
. lb 2 lb lb b max b max b max
( l b max - l b ) l b f v (в + ф) l b
2-Ч lb max 2 lb max
Таким образом, в систему уравнений движения космической тросовой системы входят уравне- ния (1) без первого уравнения, уравнение (2) и уравнение (4).
1оСМ1ЛЧЕск|ЛЕ АППАРАТЫ И ТЕХНОЛОГИИ ЕКЙЙЙМЕЯ
Том 5
2. Численные результаты
При численном моделировании использовались следующие массово-геометрические параметры тросовой системы: масса станции md = 2000 кг, ее длина d = 2 м, радиус ρd = 1 м, масса спутника mb = 20 кг, его радиус рb = 1 м, конечное значение длины троса lbmax=500 м, максимальная скорость развер- тывания Vmax = 1 м/с. Начальные условия: 0О=п/2 рад, vо = -п/2 рад, в = 0,01 рад, 5о = Фо = 0 рад, lbо = 0,01 м, v = 0,00066 рад/с, rb0 = 500 км, в0 = 50 = р>0 = 0 рад/с, lb0= 0,00033 м/с.
На рис. 3–6 показаны графики изменения параметров системы при ее движении по возмущенной (сплошная линия) и невозмущенной (штриховая линия) окололунной орбите.
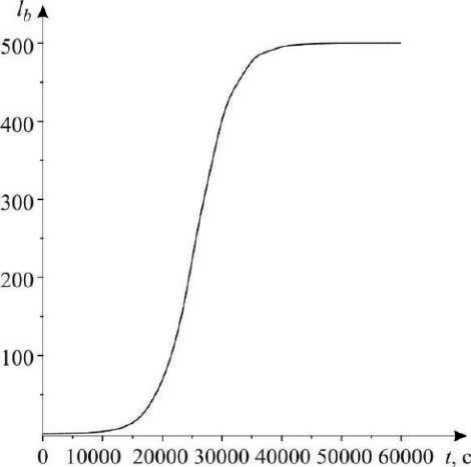
Рис. 3. Изменение длины троса bb ( t ) и скорости изменения длины троса lb ( t ) при развертывании космической тросовой системы
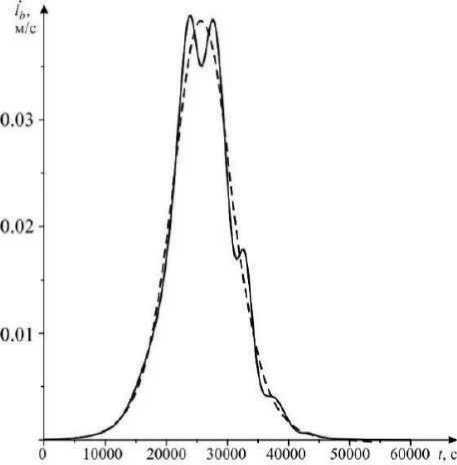
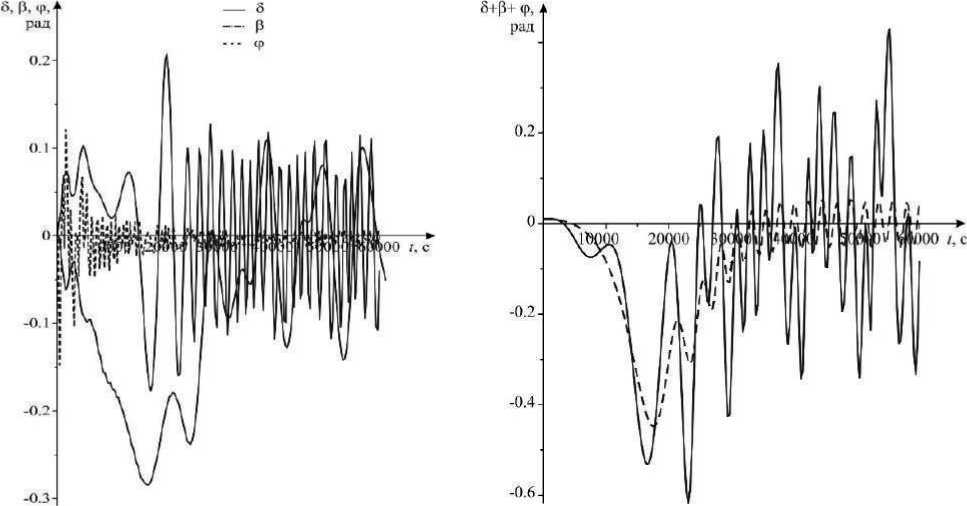
Рис. 4. Изменения углов β, φ, δ и отклонение спутника от местной вертикали (β + φ + δ) при развертывании космической тросовой системы
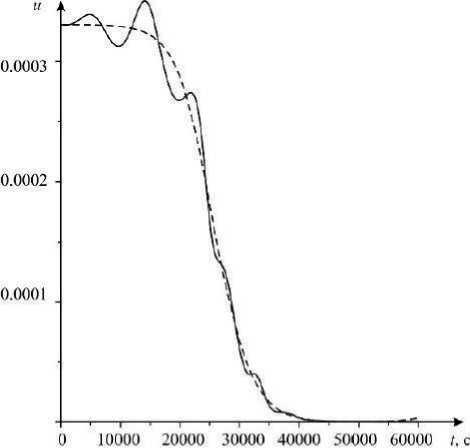
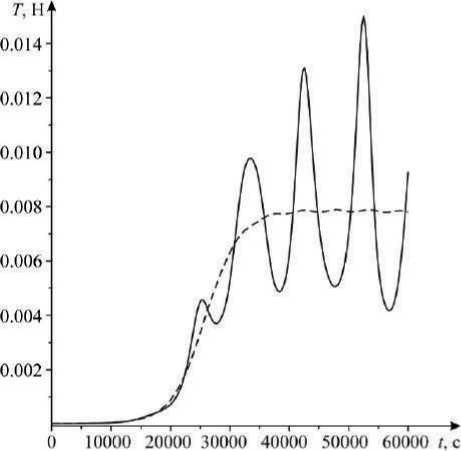
Рис. 5. График управляющей функции ub и изменения силы натяжения троса T при развертывании космической тросовой системы
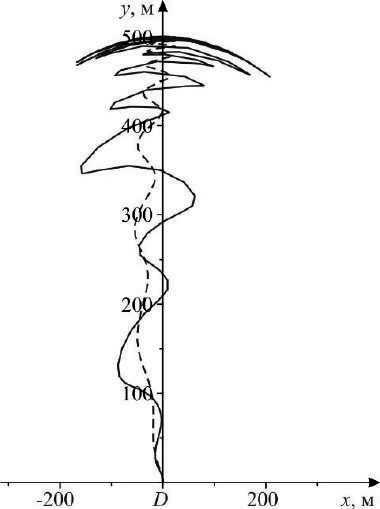
Рис. 6. Развертывание тросовой системы и орбита станции D
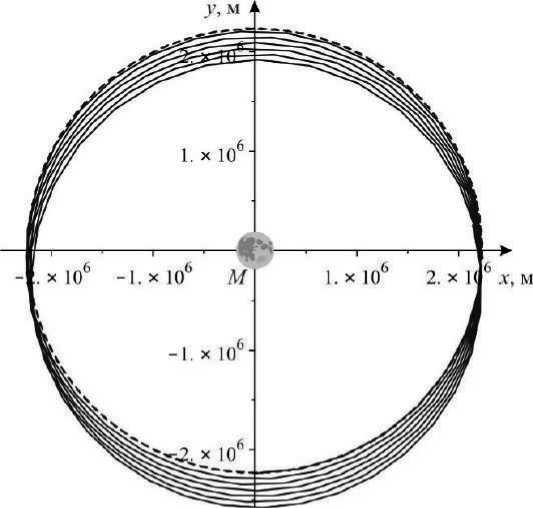
Исследуя полученные графики, можно сделать вывод, что возмущения, вызванные притяжением Земли, вызывают увеличение амплитуды колебаний спутника относительно местной вертикали.
Заключение
Рассматривалось движение космической тросовой системы, состоящей из космической станции и малого космического аппарата. Станция и спутник рассматривались как твердые тела, трос – как невесомый нерастяжимый стержень.
В работе предполагалось, что космическая тросовая система совершает радиальное развертывание по заданной программе. На движение тросовой системы оказывали влияние возмущения, связанные с притяжением Земли.
В работе получены следующие результаты:
-
1. С помощью второго закона Ньютона и теоремы об изменении кинетического момента были составлены уравнения движения и разработана математическая модель движения космической системы.
-
2. Был рассмотрен предложенный ранее закон управления развертыванием тросовой систе-

- мы и найдена сила натяжения троса, обеспечивающая требуемое управление с учетом притяжения Земли.
-
3. Показано, что предлагаемый закон управления выпуском троса обеспечивает развертывание троса на заданную длину.
-
4. Проведено сравнение графиков при движении тросовой системы по возмущенной и невозмущенной окололунной орбите. Из приведен-
Список литературы Анализ процесса развертывания окололунной тросовой системы с учетом притяжения Земли
- Белецкий В. В., Левин Е. М. Динамика космических тросовых систем. М. : Наука, 1990. 329 с.
- Cartmell M. P., McKenzie D. J. A review of space tether research // Progress in Aerospace Sciences. 2008. vol. 44. no. 1. pp. 1–21.
- Levack D. J., Horton J. F., Joyner C. R., Kokan T. S., Widman F., Guzek B. J. Mars NTP Architecture Elements Using the Lunar Orbital Platform-Gateway // 2018 AIAA SPACE and Astronautics Forum and Exposition. 2018. P. 5105.
- Burns J. O., Mellinkoff B., Spydell M., Fong T., Kring D. A., Pratt W. D., Cichan T., Edwards C. M. Science on the lunar surface facilitated by low latency telerobotics from a Lunar Orbital Platform – Gateway // Acta Astronautica. 2019. vol. 154. pp. 195–203.
- Haws T. D., Zimmerman J. S., Fuller M. E. SLS, the Gateway, and a Lunar Outpost in the Early 2030s // IEEE Aerospace Conference Proceedings. 2019.
- Пугаченко С. Е., Козедуб Д. А. Исследование режимов обслуживания экипажем окололунной орбитальной станции-космопорта // Вестник Московского государственного технического университета им. Н. Э. Баумана. Серия машиностроение. 2019. № 4. С. 31–43.
- Бухгольц Н. Н., Гольцман В. К. Курс теоретической механики. М. Оборонгиз, 1939.
- Junkins J. L., Schaub H. Analytical mechanics of space systems. American Institute of Aeronautics and Astronautics, 2009.
- Егоров В. А., Гусев Л. И. Динамика перелетов между Землей и Луной. М. : Наука, 1980. 544 с.
- Заболотнов Ю. М., Ледкова Т. А. Развертывание и стабилизация движения космической тросовой системы на круговой окололунной орбите // Труды 63-й Всеросс. науч. конф. М. 2020. С. 67–70.
- Zabolotnov Yu. M. Control of the deployment of an orbital tether system that consists of two small spacecraft // Cosmic Research. 2017. vol. 55. no. 3. pp. 224–233.
- Levin E. Dynamic analysis of space tether missions // Am. Astronaut. Soc. Adv. Astronaut. Sci.. 2007. 126 p.
