Анализ суточных вариаций измеренных координат GPS-станции ULAZ программами RTKLIB и Mathlab

Автор: Шунков А.Д., Башкуев Ю.Б.
Журнал: Вестник Бурятского государственного университета. Химия. Физика @vestnik-bsu-chemistry-physics
Статья в выпуске: 1, 2019 года.
Бесплатный доступ
Определены статистические характеристики суточных вариаций измеренных координат GPS-станции ULAZ. Проведена первичная обработка суточных данных, сравнение и статистический анализ данных станции ULAZ 2001 и 2017 гг. Показано некоторое различие статистических характеристик между измерениями координат за 16 лет. Выяснено, что программы RTKLIB и MATHLAB удобны при обработке первичных данных, связанных с позиционированием и навигацией с применением ГНСС. Выяснено, что необходима дальнейшая обработка данных, что потребует создания системы обработки больших объемов данных.
Gps-станция, радионавигационные системы, искусственные спутники, навигационные данные
Короткий адрес: https://sciup.org/148316707
IDR: 148316707 | УДК: 528.06 | DOI: 10.18101/2306-2363-2019-1-32-37
Analysis of diurnal changes of coordinates of the GPS receiving station ULAZ by programs of RTKLIB and Mathlab
Statistical characteristics of daily variations of the measured coordinates of the GPS-station ULAZ are determined. Conducted initial processing of daily statistics, comparison and statistical analysis of the data station ULAZ 2001 and 2017, Shows a difference of statisticalcharacteristics between the measurement coordinates over 16 years. It is shown that RTKLIB and MATHLAB programs are convenient for processing primary data related to positioning and navigation using GNSS. It was found that further data processing is necessary, which will require the creation of a system for processing large amounts of data.
Текст научной статьи Анализ суточных вариаций измеренных координат GPS-станции ULAZ программами RTKLIB и Mathlab
Шунков А. Д., Башкуев Ю. Б. Анализ суточных вариаций измеренных координат GPS– СТАНЦИИ ULAZ программами RTKLIB и MATHLAB // Вестник Бурятского государственного университета. Химия. Физика. 2019. Вып. 1. С. 32–37.
Целью работы является анализ суточных вариаций измеренных координат GPS–станции ULAZ программами RTKLIB и MATHLAB.
Проведена первичная обработка «сырых» суточных данных, сравнение и статистический анализ данных станции ULAZ в разные дни 2017 и 2001 гг. Показано некоторое различие статистических характеристик между измерениями координат за 16 лет.
Глобальные спутниковые радионавигационные системы (ГНСС) предназначены для определения местоположения объекта в пространстве. Они также позволяют получить данные о скорости и направление движения приёмника сигнала. В состав системы GPS (рис. 1) входят:
-
1) созвездие искусственных спутников Земли (космический сегмент);
-
2) сеть наземных станций слежения и управления (сегмент управления);
-
3) GPS-приемники (аппаратура потребителей).
Данные от спутника передаются в виде raw-файлов (в виде «сырых» данных), которые быть должны быть преобразованы в RINEX-формат (Receiver Independent Exchange Format), то есть в аппаратно-независимый формат обмена навигационными данными.
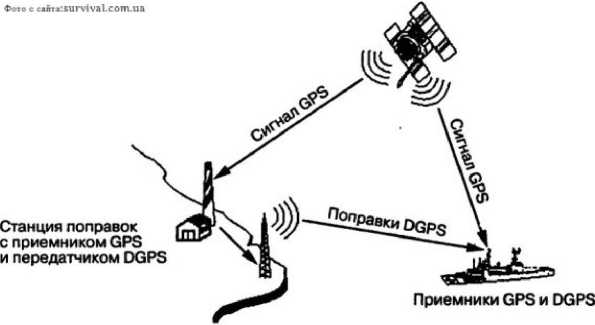
Структура дифференциальной системы GPS
Рис. 1. Структура системы GPS с дифференциальной поправкой
Этот формат позволяет производить пост-обработку полученных данных для выполнения более точных вычислений — обычно с помощью других данных, неизвестных приемнику, например за счёт применения более точных моделей ионосферных и атмосферных задержек. Для преобразования можно воспользоваться универсальным RINEX-конвертором TEQC.
RTKLIB — это пакет программ с открытым исходным кодом для стандартного и точного позиционирования. RTKLIB включает в себя следующие компоненты:
-
1) RTKNAVI: Позиционирование в реальном времени;
-
2) RTKCONV: Преобразование «сырых» данных приемника в RINEX-формат;
-
3) RTKPLOT: Просмотр и построение данных в графическом виде, полученных от RTKNAVI и RTKPOST;
-
4) RTKPOST: пост-обработка RINEX-файлов.
С помощью данного пакета программ можно анализировать суточные вариации измеренных координат GPS–станции. После преобразования raw-файлов в RINEX-формат, далее можно производить пост-обработку и анализ в RTKLIB. Для статического анализа данные обрабатываются в MATHLAB.
Для примера рассмотрим данные за 3 сентября 2017 г. и за 10 января 2001 г.
GPS-станция ULAZ является постоянно действующей с 1999 г. Для исключения влияния небольших вибраций она установленна на бетоном постаменте. Станция определяет свои текущие координаты каждые 30 сек, начиная с 00 ч 00 мин 00 сек до 23 ч 59 мин 30 сек. Количество отсчетов координат, или как принято их называть эпохами, составляет 2880 эпох.
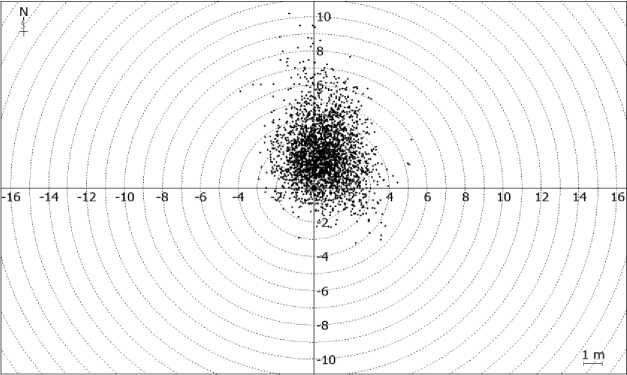
Рис. 2. Вариации координат станции ULAZ за 3 сентября 2017 г.
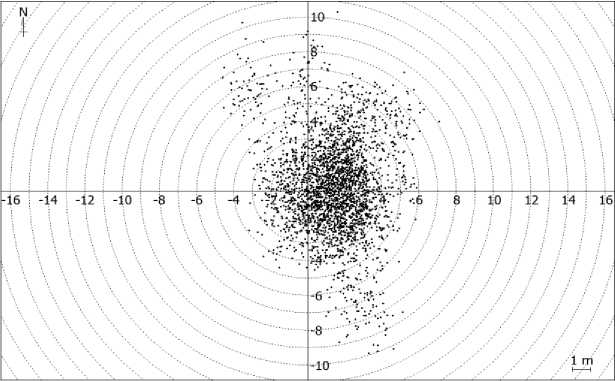
Рис. 3. Вариации координат станции ULAZ за 10 января 2001 г
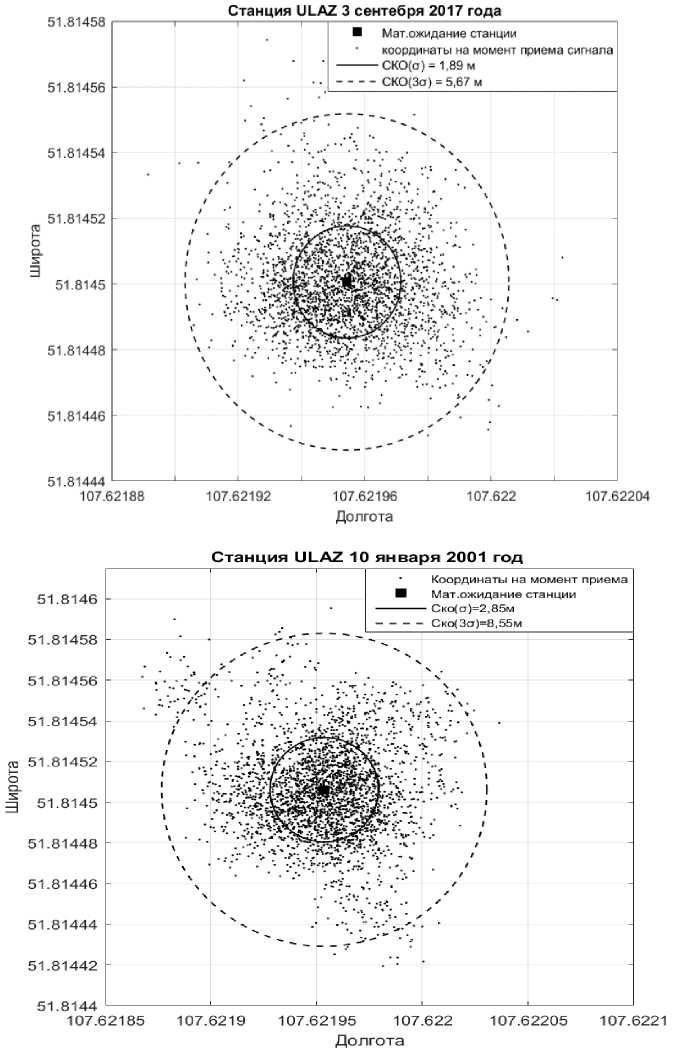
Рис. 4. Результат обработки в MATHLAB
Преобразовав данные в RTKLIB, мы получим следующую пространственную картину суточных вариаций измеренных координат станции (рис. 2-4).
При визуальном сравнении можно заметить что, на рис. 2 отсчеты координат (точки) расположены более плотно, с меньшим разбросом по сравнению с рис. 3.
Для количественного анализа найдем математическое ожидание и среднее квадратичное отклонение (СКО) с использованием программы MATHLAB.
Математическое ожидание за 3 сентября 2017 г. и за 10 января 2001 г. составляет: 51.814506°С.Ш, 107.621954°В.Д.
Вариация точек по величине СКО (рис. 4) с 2001 г. уменьшилось на 0,96 метров. Точки, выходящие за радиус 3σ, за 3 сентября составляют 1,1%, а за 10 января 2,01%. Отсюда можно предположить, что точность позиционирование со временем изменилась и стала выше. Причинами этих изменений могут быть: 1) созвездие новых GPS-спутников (космический сегмент); 2) увеличение точности определения орбит GPS-спутников сетью наземных станций слежения и управления (сегмент управления).
Таким образом, определены статистические характеристики суточных вариаций измеренных координат GPS–станции ULAZ . Показано, что программы RTKLIB и MATHLAB удобны при обработке первичных данных, связанных с позиционированием и навигацией с применением ГНСС. Необходима дальнейшая обработка данных GPS–станции ULAZ за период с 1999 по 2019 гг. Она потребует создания системы обработки больших объемов данных, которая будет соответствовать приоритету научно-технологического развития Российской Федерации, пункт а).
Список литературы Анализ суточных вариаций измеренных координат GPS-станции ULAZ программами RTKLIB и Mathlab
- Спутниковая система навигации [Электронный ресурс]. - Режим доступа: https://ru.wikipedia.org/wiki/Спутниковая_система_ навигации, свободный (дата обращения 12.04.19)
- [Электронный ресурс]. - Режим доступа: https://ru.wikipedia.org/wiki/RINEX, свободный (дата обращения 12.04.19)
- Manual for program RTKLIB [Электронный ресурс]. - Режим доступа: http://www.rtklib.com, свободный.(дата обращения 12.04.19.)
