Анализ технологического процесса технического обслуживания как объекта контроля состояния функциональной системы воздушного судна (на примере гидросистемы вертолета Ми-8)
")
Автор: Коптев Анатолий Никитович, Чекрыжев Николай Викторович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 4-1 т.15, 2013 года.
Бесплатный доступ
В статье представлен анализ технологического процесса технического обслуживания функциональной системы сложного бортового оборудования воздушного судна с целью его оптимизации и снижения материальных затрат.
Техническое обслуживание, модель функциональной системы, макрообразующие, технологический процесс
Короткий адрес: https://sciup.org/148202242
IDR: 148202242 | УДК: 656.7
Analysis of technological process of technical maintenance as an object of an aerial vehicle functional system condition control (by the example of hydraulic system of helicopter Mi-8)
The article provides analysis of technological process of technical maintenance of aerial vehicle complex aircraft equipment functional system for the purpose of its optimization and reducing the material expenses.
Текст научной статьи Анализ технологического процесса технического обслуживания как объекта контроля состояния функциональной системы воздушного судна (на примере гидросистемы вертолета Ми-8)
В настоящее время невозможно создать сложные системы, обладающие достаточным качеством функционирования, без постоянного контроля её состояния в процессе эксплуатации с целью своевременного предупреждения возможных отказов.
В связи с усложнением конструкций современных воздушных судов (ВС) и их систем, в последние годы все острее ставятся задачи о разработке теоретических и научных основ технического обслуживания и ремонта (ТОиР) всех видов авиационной техники с применением методов и средств упреждающего воздействия на бортовые системы, что позволит ввести в практику гибкие программы ТОиР, для ряда типов ВС отказаться от проведения весьма трудоемких капитальных ремонтов [1].
Для решения этих проблем требуется определенный объём специального информационного обеспечения системы ТОиР, направленный на совершенствование методов прогнозирования развития функциональных систем (ФС) ВС, анализ его технического состояния (ТС) и, соответствующий, выбор оптимальной стратегии ТОиР.
Таким образом, разработка моделей технического обслуживания (ТО) ФС современных ВС с целью решения практических задач снижения материальных затрат и оптимизации процессов их ТО, повышения эффективности и надёжности функционирования систем является актуальной.
Система ТОиР относится к классу больших систем, в которых превалирует человеческий фактор.
чии внешних возмущающих воздействий, предполагает последовательный переход от общего к частному [2] .
Для анализа и синтеза процедур оперативного, периодического и других видов системы ТО ВС необходимо совместно рассмотреть процесс функционирования составных частей ФС ВС с системой процедур их ТО, включающей контроль ТС её отдельных элементов.
Представим ФС ВС моделью в виде “чёрного ящика” (рис. 1), связанного с окружающим миром (системами, средой) посредством внешних входных связей х 1 , х 2 , . . ., х n и m (переменными) выходами y 1 , y 2 , . . . , y m . [3].
Под средой понимаем совокупность всех объектов, воздействие которых на систему изменяет её техническое состояние [4].
Состояние элемента ( g i ) ФС определяется его макросвойствами в данный момент времени (давлением, величиной перемещения, усилием и т.д.).
К реальным эксплуатационным факторам, под воздействием которых изменяется состояние ВС, относятся условия выполнения полётов, режимы работы изделий и агрегатов, температура, влажность, запылённость атмосферы, организация системы ТОиР ВС, квалификация исполни-
Воздействия окружающей среды
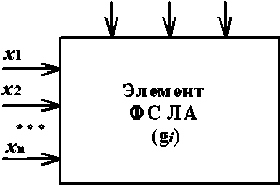
Рис. 1. Модель “чёрного ящика” элемента ФС
телей, качество выполнения ТО, условий выполнения работ и т.п. [5].
Входными величинами х 1 , х 1 , . . . , х n являются воздействия авиационного специалиста на исследуемый объект в виде операций технологических, регулировочных и контрольных работ на элементы ФС, согласно Единому регламенту технической эксплуатации (ЕРТЭ) данного типа ВС.
Выходными величинами y 1 , y 2 , . . . , y m являются параметры объекта и их оценка, изменяющиеся под влиянием входных величин (устранение отказа, восстановление работоспособности, изменение рабочих параметров элементов ФС в соответствии с заданным требуемым диапазоном и т.п.).
Как показывают исследования, приведенные в работах Бусленко В.Н., Устенко А.С., Дмитриева А.К., Советова Б.Я., Цвиркун А.Д., Виноградова В.А., Барзилович Е.Ю., Перегудова Ф.И., Волковой В.Н. и других, построение модели сложной системы в целом часто оказывается практически невозможным из-за сложности процесса ее функционирования. В этих случаях приходится расчленять моделируемый объект на конечное число подсистем, сохраняя связи между ними с учетом выполняемой задачи. Этот процесс продолжаем до тех пор, пока полученные подсистемы в условиях рассматриваемой задачи будут просты и удобны для математического описания.
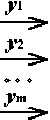
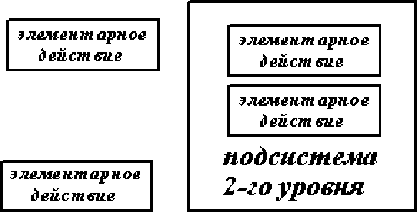
Виды ТО ВС, представляющие собой комплекс операций по поддержанию работоспособности или исправности изделия при использовании его по назначению, ожидании, хранении и транспортировании [6], разбиваем на подсистемы первого уровня (рис. 2), которые в своём составе имеют подсистемы второго, третьего . . . n – уровня, пока не получим неделимую её часть, называемую элементом, в виде отдельного элементарного действия авиационного специалиста (осмотреть, переместить, смазать, взять, положить и т.п.) (рис. 3).

Рис. 2. Виды ТО ВС
Для разработки обобщённой модели системы процедур ТО ВС взяты основные положения (ЕРТЭ) вертолёта Ми-8 (табл. 1).
Процедуры системы ТО достаточно отработаны и регламентированы руководящей, нормативной и эксплуатационной документацией, следовательно, отношения и связи между подсистемами и составляющими их элементами определена, т.е. сетевая структура системы процедур ТО по обеспечению заданного уровня безопасности ВС.
Указанные процессы достаточно успешно применялись с середины 70-х годов, в условиях централизованного планирования деятельности всех предприятий авиатранспортной системы.
С начала 90 –х годов для поддержания безопасности в ультрабезопасных системах, к которым относится авиация, ИКАО требует разработки прогностических систем сбора данных о безопасности полетов, которые дополнят существующие реагирующие системы (РУБП) [7].
В связи с новыми концепциями современного подхода к безопасности полётов, постоянный мониторинг технического состояния ФС ВС позволяет получать информацию о зарождающихся дефектах, что требует введения изменений и корректировки сложившихся производственных процессов, процедур и услуг ТО, в рамках реализации современных тенденций упреждающего обслуживания.
Для представления структурной схемы системы ТО используем графическое отображение её в виде многоуровневого графа, где вершины обозначают подсистемы первого уровня, второго и т.д., а рёбра между ними – отношения и связи (рис. 4).
Система процедур ТО
подсистема 1-го уровня
Рис. 3. Пример модели состава системы процедур ТО
Таблица 1. основные положения (ЕРТЭ) вертолёта Ми-8
|
№ |
Система процедур ТО ВС |
Подсистема процедур ТО 1-го уровня |
Подсистема процедур ТО ФС ВС 2-го уровня |
Элементы процедур ТО |
|
1. |
Оперативное ТО |
1. По встрече |
Общие работы согласно ЕРТЭ |
Элементарные действия |
|
2. По обеспечению стоянки |
Общие работы согласно ЕРТЭ |
Элементарные действия |
||
|
3. По обеспечению вылета |
Общие работы согласно ЕРТЭ |
Элементарные действия |
||
|
4. По осмотру и обслуживанию: форма А1, (А2, Б). |
Работы согласно ЕРТЭ по ФС ВС
|
Элементарные действия |
||
|
2. |
Периодическое ТО |
1. Через 150 часов налёта (300 часов, 450 часов, 600 часов, 750 часов) |
Работы согласно ЕРТЭ по ФС ВС
|
Элементарные действия |
|
3. |
Сезонное ТО |
1. При переходе к осенне-зимней (весенне-летней) эксплуатации |
Работы согласно ЕРТЭ по ФС ВС
|
Элементарные действия |
|
4. |
Специальное ТО |
1. В случаях: грубой посадки (полёт в турбулентной атмосфере, выкатывание ВС за пределы ВВП, и т.п.) |
Работы согласно ЕРТЭ по ФС ВС
|
Элементарные действия |
Реализацию учета изменения состояния z ( t ) [8] как некоторую внутреннюю характеристику элемента ФС в результате воздействия процедур ТО (соответствие ТТ, не соответствие ТТ, ослабло крепление агрегата, мал уровень масла в баке и т.д.), представим в виде динамической модели, рассматривая выход y ( t ) как реакцию элемента системы ( g i ) на управляемый сигнал u ( t ) и неуправляемый n ( t ) (рис. 5).
Таким образом, процедуру ТО ФС ВС можно описать в виде соответствия между элементами множества Х возможных значений xi и мно- жества Т моментов времени t в виде отображения Т > Х : х (t) е Х T, t е Т
Тогда динамическую модель элемента ( g i ) можно выразить как совокупность двух процессов: Х T ={ X ( t )} и YT { у ( t )}, t е Т .
Состоянию z ( t ) элементов ( g i ) соответствует отображение Т / : Z Ч Т > Y и выходная величина у ( t )= / ( t , z ( t )), t е Т .
Так как на практике при выполнении процедур ТО входной параметр x i не мгновенно преобразуется в выходной y ( t ) то для описания связи между входом х ( t ) и состоянием z ( t )
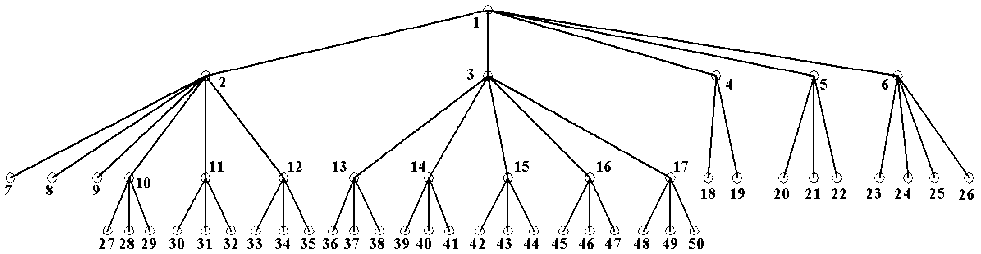
Рис. 4. Структурная схема системы процедур ТО:
1– система процедур ТО; 2 – оперативное ТО; 3 – периодическое ТО; 4 – сезонное ТО; 5 – специальное ТО; 6 – при хранении; 7 – по встрече; 8 – обеспечение стоянки; 9 – обеспечение вылета; 10 – А1, 11 – А2, 12 – Б, 13 – через 150 часов; 14 – через 300 часов; 15 – через 450 часов; 16 – через 600 часов; 17 – через 750 часов; 18 – работы к осенне-зимней эксплуатации; 19 – работы к весенне-летней эксплуатации; 20 – после грубой посадки; 21 – выкатывание ЛА за пределы ВПП; 22 – полёт в зоне грозовой деятельности; 23 – через 10 суток; 24 – через 30 суток; 25 – через 3 месяца; 26 – через 6 месяцев; 27, 28, 29, 30, 31, 32, 33, 34, 35, 36, 37, 38, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, 49, 50 – работы по ФС ВС
X(t)
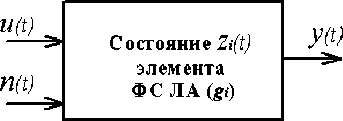
Рис. 5. Динамическая модель элемента ФС ВС
элемента ( g i ) введём семейство отображений ^ Tt : Z Ч Х (0)> Z для всех значений t G Т , т е Т и T ^ t , т.е. состояние ( g i ) в любой момент t > T однозначно определяется состоянием ZT в момент T и отрезком реализации входа X (0) от T до t :
Z ( t )= ^ Tt ( ZT , X (0))= ^ ( t , T , ZT , X (0))
Таким образом, модель процедуры ТО элементов ( g i ) можно представить как “белый ящик”, задав множество входов и получив множество выходов и связей между ними:
Х "> Z iP> Y. (1)
Для количественного анализа технологического процесса (ТП) ТО и оценки результатов состояния функционирования системы ТОиР необходимо построение модели, отражающей её динамические свойства.
Представим статическую модель гидросистемы (ГС) вертолёта Ми-8 (рис. 6) [9] совместно с процессом ТО как динамическую систему с причинно-следственными связями в пространстве состояний элементов ( g i ) исследуемой системы.
Разработанную формальную модель ГС вертолёта Ми-8 (рис. 6), рассмотрим как основание для её декомпозиции, т.е. процесса расчленения на функциональные узлы составных частей ФС с целью уменьшения сложности сети причинно-следственных связей между элементами исследуемой системы.
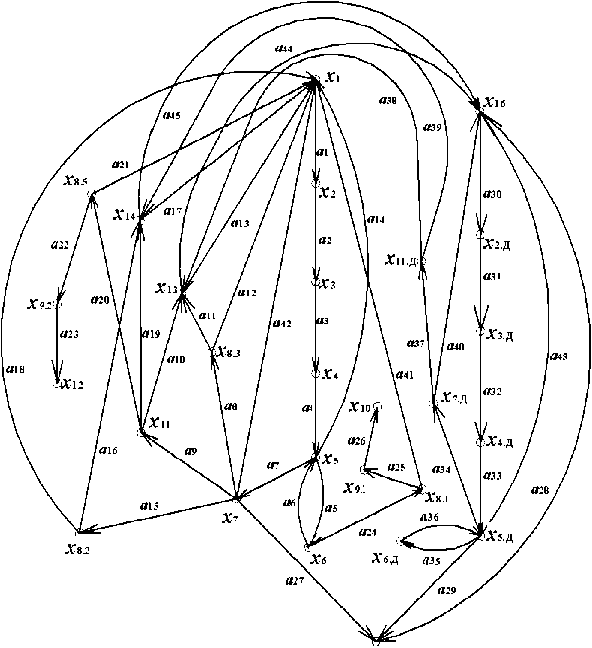
Для этого используем общее её представление в рамках теории графов (рис. 7) [9].
Для анализа структурной схемы полного графа G , используемого при разработке модели ТО исследуемой ГС, выделим его сильные компоненты (СК) путём построения соответствующим им порожденных графов G i- е G •
Для этого определим СК ( Х * 1 ) в графе G , содержащую начальную вершину х 1 . Множество любых вершин графа G , достижимых из х 1 , можно представить в виде
R ( X 1 )={ X 1 } и Г ( X 1 ) и Г 2 ( X 1 ) и
U ... U Гр ( X 1 ), (2)
где р – конечное число длин (0, 1, 2 . . . р ) пути достижимости вершины х 1 .
Контрадостижимым множеством Q ( х 1 ) графа G является множество вершин, из которых можно достигнуть вершину х 1 . Для этого используем выражение
Q ( X 1 )={ X 1 } и Г " 1 ( X 1 ) и Г "2 ( X 1 ) и
U ... и Г " р ( x 1 ). (3)
Так как R ( х 1 ) является множеством вершин, достижимых из х 1 , а Q ( х j ) – множеством вершин х j , из которых можно достигнуть х 1 , то множество R ( X 1 ) n Q ( х j ) однозначно определяет СК графа G , содержащую вершину х 1 .
Из полного графа G (рис. 7) определим
R ( х 1 )={ х 1 , х 2 , х 3 , х 4 , х 5 , х 6 , х 8 . 1 , х 9 . 1 , х 10 , х 7 , х 8 . 2 , х 11 , х 8 . 3 , х 13 , х 14 , х 8 . 5 , х 9 . 2 , х 12 , х 15 , х 16 , х 2 . Д , х 3 . Д , х 4 . Д , х 5 . Д , х 6 . Д , х 7 . Д , х 15 , х 11 . Д }
Q (х1 )={ х1 ,х8.2,х8.5,х14,х13,х8.3, х5 , х8.1, х7 }
Следовательно, СК, содержащая вершину х1 , является порождённым подграфом х * 1 = ( R(х 1) П Q(х 1)) =
={ х 1 , х 8 . 2 , х 8 . 5 , х 14 , х 13 , х 8 . 3 , х 5 , х 8 . 1 , х 7 }. (4)
Так как путь между вершинами х 1 и х 5 представляет собой простую ориентированную цепь дуг а 1 , а 2 , а 3 , а 4 , в которой вершины х 2 , х 3 , х 4 используются только один раз, то в этом случае её можно представить как последовательность вершин х 2 , х 3 , х 4 .
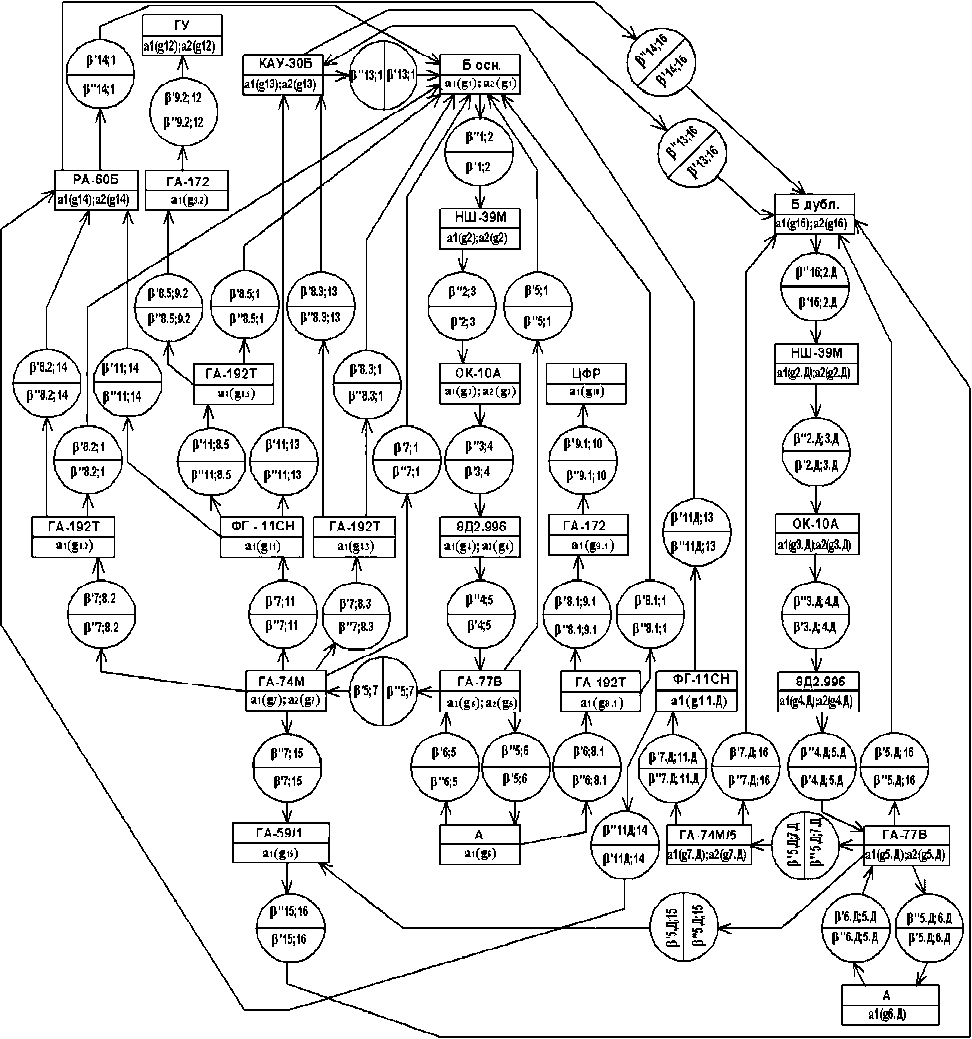
Рис. 6. Схема множества изображений образующих конфигурации гидросистемы вертолёта
Xis
Рис. 7. Полный граф G исследуемой ГС вертолёта Ми-8
Путь, состоящий из дуг а 5 , а 6 (рис. 7) является замкнутым маршрутом, в котором начальная и конечная вершина является одной и той же вершиной х 5 , поэтому его представим как последовательность вершин х 5 , х 6 , х 5 .
Путь х 1 , х 5 , х 7 , х 11 , х 8 . 5 , х 1 является контуром, т.к. в нём все вершины используются только один раз (за исключением начальной и конечной вершины, которые совпадают), поэтому вершину х 8 . 5 считаем входящей в состав СК.
Тогда выражение (4) примет окончательный вид х * 1 = { R ( X 1 ) Q Q ( x 1 ) ) ={ х 1 , х 2 , х 3 , х 4 , х 5 , х 6 , х 7 , х 11 , х 8 . 1 , х 8 . 2 , х 13 , х 14 , х 8 . 3 , х 8 . 5 }. (5) Откуда
Г ( х * 1 )={ х 9 . 1 , х 9 . 2 , х 15 , х 16 };(6)
Г " 1 ( х * 1 )={ х 11 . д }. (7)
Удаляя вершины { х 1 , х 2 , х 3 , х 4 , х 5 , х 6 , х 7 , х 11 , х 8 . 1 , х 8 . 2 , х 13 , х 14 , х 8 . 3 , х 8 . 5 } из графа G =( Х , Г ), выделим в оставшемся порождённом подграфе G 1 = ( Х - R ( х 1 ) Q Q ( х 1 ) ) новую СК, содержащую х j Е Х - R ( х 1 ) Q Q ( х 1 ).
Эту процедуру продолжаем до тех пор, пока все вершины графа G не сгруппируем в соответствующие СК [10].
Новый полученный граф G =( Х * , Г * ), называемый конденсацией графа G , определяется таким образом, что каждая его вершина представляет множество вершин некоторой сильной компоненты графа G , при этом дуга ( х * , , х * j ) существует в G тогда, когда в G существует дуга ( х i , х j ) такая, что х i принадлежит компоненте, соответствующей вершине х * i , а X j - компоненте, соответствующей вершине х * j (рис. 8).
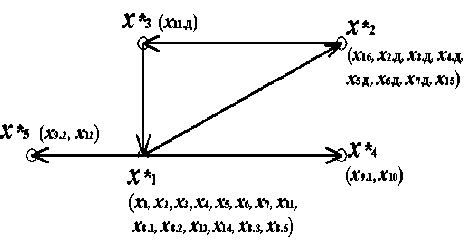
Рис. 8. Граф G * - конденсация графа G
Полученная конденсация графа G * представляет структуру гидросистемы в которой элементы каждой сильной компоненты графа G имеют равное влияние на работу друг на друга.
Используя понятия ранг элемента, позволяющий распределить элементы графа в порядке их значимости, определяемой количеством связей данного элемента, можно предположить, что чем выше ранг элемента, тем более тяжёлыми будут последствия при изменении качества его функционирования [11].
Полученную конденсацию графа G исполь- зуем в дальнейшем для разработки модели системы ТО ФС, в основе которой процедуры ТО будут построены в соответствии с вершинами графа G , представляющие собой его сильные компоненты.
Теория образов [12] допускает в случае сложной конфигурации объединение нескольких образующих в подконфигурации, рассматриваемые как неделимые элементы, называемые макрообразующими с заданными внутренними связями и внешней арностью подконфигурации.
В качестве макрообразующих G i конфигурации ГС (рис. 6) примем сильные компоненты конденсации G * (рис. 8).
Таким образом, алгоритм декомпозиции конфигурации гидросистемы вертолёта Ми-8 (рис. 6) можно представить в виде блок-схемы (рис. 9).
Состав и внутренняя структура макрообразующей G i определяется составом и множеством дуг порождённых подграфов х * i , а внешняя арность макрообразующих соответствует дугам х *i , связывающими их с вершинами графа G (табл. 2).
Изображение макрообразующей G 1 представлено на рис. 10.
Аналогично определяем макрообразующие G 2 , G 3 , G 4 , G 5 .
Для анализа большинства операций по ТОиР ВС, с целью совершенствования ТП, уменьшения времени обслуживания и снижения влияния случайных задержек, часто необходимо знание параметров и характеристик промежуточных подопераций, что требует расчленения операции на отдельные микродвижения, позволяющие представить любой трудовой процесс как совокупность пространственно-временных образов, описывающих движения [13].

Рис. 9. Блок – схема алгоритма декомпозиции конфигурации ГС вертолёта
Таблица 2. Состав и внутренняя структура макрообразующих G i
|
№ п/п |
Макро образующая |
Состав |
Входящая арность |
Выходящая арность |
Г ( х 1 ) |
Г ( х 1 ) |
|
1. |
G 1 |
х 1 , х 2 , х 3 , х 4 , х 5 , х 6 , х 7 , х 11 , х 8 . 1 , х 8 . 2 , х 13 , х 14 , х 8.3 , х 8 . 5 |
а 38 , а 39 |
а 25 , а 22 , а 27 , а 44 , а 45 |
а 25 , а 22 , а 27 , а 44 , а 45 |
а 38 , а 39 |
|
2. |
G 2 |
х 16 , х 2 . Д , х 3 . Д , х 4 . Д , х 5 . Д , х 6 . Д , х 7 . Д , х 15 |
а 27 , а 44 , а 45 |
а 37 |
а 37 |
а 27 , а 44 , а 45 |
|
3. |
G 3 |
х 11 . Д |
а 37 |
а 38 , а 39 |
а 38 , а 39 |
а 37 |
|
4. |
G 4 |
х 9 . 1 , х 10 |
а 25 |
0 |
- |
а 25 |
|
5. |
G 5 |
х 9 . 2 , х 12 |
а 22 |
0 |
- |
а 22 |
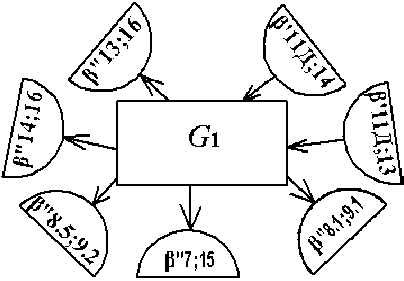
Рис. 10. Графический формализм макрообразующей G 1
Для этого производственный процесс ТО зададим последовательностью основных действий выполняемых работ ТО (осмотреть, проверить, замерить и т.п.), сгруппировав их в четыре класса образующих, обозначив символами и выделив следующим образом (табл. 3).
Для представления пространственно-временных образов движения [12], для описания процедур ТО, носящих направленный детерминированный временной характер, используем четырёхмерное опорное пространство Х = R 3 X R 1 , где R 1 — пространство времени, характеризующееся направлением смены состояний ( Z ) элементов в соответствии с порядком выполнения процедур ТО.
Таблица 3. Классы образующих
|
(^^ — Операция процедуры TO hi продолжительностью Ti |
||
|
Tk |
- Контроль состояния ki продолжительностью Tk |
|
|
IF |
Перемещение nj продолжительностью Тп |
|
|
T”^ — 3 адержк a 3i продолжительностью Тз |
||
Последовательность смены состояний подразумевает наличие упорядоченных процессов выполнения процедур ТО, которыми объясняется переход элемента из одного состояния в другое, т.е. его движение.
Представим процесс ТО элемента ФС как динамическую систему с причинно-следственными связями между выполненной работой и его состоянием, оцениваемым по определённым правилам.
Под оценкой состояния будем понимать результат сравнительного анализа набора фиксированных параметров элементов ФС ВС в данный момент времени (время срабатывания, величина давление, перемещение штока, уровень рабочей жидкости в баке и т.п.) с номинальными значениями этих параметров.
Для построения конфигураций и изображений пространственно-временных образов процедур ТО, описывающих операции для смены состояний образующей, конфигурации и т.п. по определённым законам, используем преобразования подобия, включающие в себя сдвиги по времени t ^ t + A t. Воздействия на показатели связей образующей примут значения tex. + A t и teux. + A t при условии teux. < tBX., что означает, любая работа начи- нается тогда, когда выполнены предыдущие и стрелка направлена от tвых. к tвх. .
Таким образом, множество 7 соединений образующих конфигурации системы ТОиР ФС ВС имеет У, - частичный порядок и состоит из линейных упорядоченных цепочек смены состояний об- разующих, что и определяет полное движение объекта из одного состояния в другое в пространстве состояний системы процедур ТОиР [11].
В качестве идентификатора образующей gi ФС примем операцию её ТО Ai , признака образующей – продолжительность Т i операции Ai ТО, а показателями связей являются переходы из одного состояния в другое, соответствующие Т i продолжительности Ai - той операции системы процедур ТОиР.
Преобразования подобия, включающие сдвиги по времени t ^ t + A t и воздействия на показатели связей образующих примут значения t ex. + A t и t вых. + A t .
Тогда признаки A i операции соответствуют
Тi ,
продолжительности
её
так что показатели
связей удовлетворяют уравнению ti = ts-i + A ti, где ti - окончание Ai - той операции ТО, ts.i - начало Ai - той операции ТО.
При проведении планового ТО (в соответствии с ЕРТЭ), возможно несоответствие ТТ или обнаружение отказов и неисправностей агрегатов ФС, что требует проведения внеплановых дополнительных работ по восстановлению работоспособности агрегата ( A ' i ) продолжительностью T i' .
Графическое изображение образующей регулярной пространственно - временной конфигурации представлено на рис. 11.
A i ( g i ) – операция ТО образующей g i в системе процедур ТОиР, T i – продолжительность A i
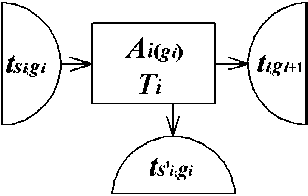
Рис. 11. Изображение пространственновременного образа образующей процедуры ТО элемента системы ВС
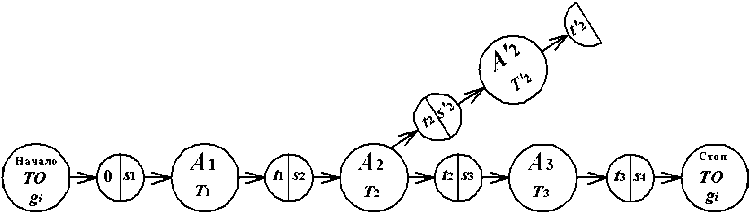
Рис. 12. Пример диаграммы выполнения операций A i процедуры ТО образующей g i
Масло АМ Г-10
— Заправка масла в АМЗ
_ подготовка рабочего
Список литературы Анализ технологического процесса технического обслуживания как объекта контроля состояния функциональной системы воздушного судна (на примере гидросистемы вертолета Ми-8)
- Чинючин Ю.М. Методология и современные научные проблемы технической эксплуатации летательных аппаратов. Часть I. М.: МГТУ ГА, 1999. 64 с.
- Буравлев А.И. Управление техническим состоянием динамических систем. М.: Машиностроение, 1995. 240 с.
- Эшби У.Росс. Введение в кибернетику. М.: Иностранная литература, 1959. 432с.
- Волкова В.Н. Теория систем. М.: Высшая школа, 2006. 511 с.
- Далецкий С.В. Эффективность технической эксплуатации самолетов гражданской авиации. М.: Воздушный транспорт, 2002. 210с.
- ГОСТ 18322-78. Система технического обслуживания и ремонта техники. Термины и определения. М.: Стандартинформ, 2007. 11 с.
- Doc. 9859 -AN/474. Руководство по управлению безопасностью полетов. ИКАО. 2009.
- Мельникова Л.И. Системный анализ при создании и освоении объектов техники. М.: ВНИИПИ, 1991. 85 с.
- Чекрыжев Н.В., Коптев А.Н. Формализация представления функциональных систем летательных аппаратов для структурного анализа (на примере гидравлической системы вертолета Ми-8)//Проблемы машиностроения и автоматизации, №3, 2012. С. 29 -34.
- Кристофиденс Н. Теория графов: алгоритмический подход. М.: Мир, 1978. 432 с.
- Нечипоренко В.И. Структурный анализ систем. М.: Советское радио, 1977. 216 с.
- Гренандер У. Лекции по теории образов. Том 1. Синтез образов. М.: Мир, 1979. 382 с.
- Дружинин Г.В. Процессы технического обслуживания автоматизированных систем. М.: Энергия, 1973. 272 с.
