Анализ точности позиционирования при конструкционных погрешностях в установке меканум-колёс мобильной платформы

Автор: Панкратьева Г.В., Мордин А.Е., Сайпулаев Г.Р.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Механика
Статья в выпуске: 4 т.23, 2023 года.
Бесплатный доступ
Введение. Мобильные роботы, способные осуществлять всенаправленное движение, широко применяются в различных областях человеческой деятельности. Для обеспечения высокой точности позиционирования всенаправленных платформ с меканум-колёсами требуется разработать их детальные математические модели, используемые при построении системы управления движением. Из-за непростой конструкции меканум-колёс при построении всенаправленных платформ могут возникать различные погрешности, включая погрешность установки таких колёс на платформу. Влияние ее на точность движения платформы ранее не исследовалось. Целью данной работы является оценка ошибок позиционирования, возникающих из-за наличия конструкционных погрешностей в установке меканум-колёс, и анализ влияния указанных погрешностей на точность отработки программного движения при использовании управления на кинематическом уровне.Материалы и методы. Анализ точности позиционирования основан на математическом моделировании кинематики платформы с учетом конструкционных погрешностей в установке меканум-колёс. Для описания взаимосвязи между угловыми скоростями вращения колес и скоростями платформы используются условия непроскальзывания точек контакта по опорной поверхности. Численные расчеты проведены в математическом пакете Wolfram Mathematica.Результаты исследования. Получена формула для оценки погрешностей псевдоскоростей платформы при программном управлении, формируемом на кинематическом уровне. Проведена оценка погрешностей скоростей платформы для простых движений. По результатам расчетов показано, что погрешности скоростей являются значительными для роботов с меканум-колёсами, функционирующих автономно.Обсуждение и заключение. Результаты расчетов продемонстрировали существенное влияние погрешностей установки колес на точность позиционирования меканум-платформы и подтвердили необходимость учитывать указанные конструкционные погрешности при создании автономных меканум-платформ. Построенная модель кинематики робота позволяет прогнозировать ошибки отработки скоростей платформы, возникающие при программном управлении, а также отклонения координат геометрического центра платформы от программного движения. Кинематическая модель может быть использована для повышения точности позиционирования за счет формирования управления движением платформы, компенсирующего влияние неточностей установки меканум-колёс.
Меканум-колесо, всенаправленная платформа, кинематическая модель, конструкционные погрешности, программное управление
Короткий адрес: https://sciup.org/142239831
IDR: 142239831 | УДК: 531.133.1 | DOI: 10.23947/2687-1653-2023-23-4-356-364
Analysis of positioning accuracy in case of design errors in the installation of mecanum wheels of the mobile platform
Introduction. Mobile robots capable of omnidirectional movement are widely used in various fields of human activity. To provide high accuracy of positioning of omnidirectional platforms with mecanum wheels, it is required to develop their detailed mathematical models used in the construction of a motion control system. Due to the complicated design of the mecanum wheels, various errors may occur during the construction of omnidirectional platforms, including the error of installing such wheels on the platform. Its effect on the accuracy of the platform movement has not been studied before. This work aims at assessing the positioning errors that arise due to the presence of design errors in the installation of mecanum wheels, and analyzing the effect of these errors on the accuracy of program motion testing when using control at the kinematic level.Materials and Methods. The analysis of positioning accuracy was based on mathematical modeling of the platform kinematics, taking into account structural errors in the installation of mecanum wheels. To describe the relationship between the angular speeds of rotation of the wheels and the speeds of the platform, the conditions of nonslip of the contact points on the support surface were used. Numerical calculations were carried out in the Wolfram Mathematica package.Results. A formula was obtained for estimating errors in platform pseudovelocities under program control formed at the kinematic level. The estimation of the errors of the platform speeds for simple movements was carried out. According to the calculation results, it has been shown that the speed errors are significant for robots with mecanum wheels operating autonomously.Discussion and Conclusion. The calculation results demonstrated the significant impact of wheel installation errors on the positioning accuracy of the mecanum-platform, and confirmed the need to take into account these design errors when creating autonomous mecanum-platforms. The constructed model of the robot's kinematics makes it possible to predict errors in platform speeds that arise under program control, as well as deviations of the coordinates of the geometric center of the platform from the program motion. The proposed kinematic model can be used to improve the positioning accuracy through forming a platform motion control that compensates for the influence of wheel installation errors.
Текст научной статьи Анализ точности позиционирования при конструкционных погрешностях в установке меканум-колёс мобильной платформы
Original article
Analysis of Positioning Accuracy in Case of Design Errors in the Installation of Mecanum Wheels of the Mobile Platform
Galina V. Pankrateva , Anton E. Mordin , Gasan R. Saypulaev И
Introduction. Mobile robots capable of omnidirectional movement are widely used in various fields of human activity. To provide high accuracy of positioning of omnidirectional platforms with mecanum wheels, it is required to develop their detailed mathematical models used in the construction of a motion control system. Due to the complicated design of the mecanum wheels, various errors may occur during the construction of omnidirectional platforms, including the error of installing such wheels on the platform. Its effect on the accuracy of the platform movement has not been studied before. This work aims at assessing the positioning errors that arise due to the presence of design errors in the installation of mecanum wheels, and analyzing the effect of these errors on the accuracy of program motion testing when using control at the kinematic level.
Materials and Methods. The analysis of positioning accuracy was based on mathematical modeling of the platform kinematics, taking into account structural errors in the installation of mecanum wheels. To describe the relationship between the angular speeds of rotation of the wheels and the speeds of the platform, the conditions of nonslip of the contact points on the support surface were used. Numerical calculations were carried out in the Wolfram Mathematica package. Results. A formula was obtained for estimating errors in platform pseudovelocities under program control formed at the kinematic level. The estimation of the errors of the platform speeds for simple movements was carried out. According to the calculation results, it has been shown that the speed errors are significant for robots with mecanum wheels operating autonomously.
Discussion and Conclusion. The calculation results demonstrated the significant impact of wheel installation errors on the positioning accuracy of the mecanum-platform, and confirmed the need to take into account these design errors when creating autonomous mecanum-platforms. The constructed model of the robot's kinematics makes it possible to predict errors in platform speeds that arise under program control, as well as deviations of the coordinates of the geometric center of the platform from the program motion. The proposed kinematic model can be used to improve the positioning accuracy through forming a platform motion control that compensates for the influence of wheel installation errors.
Введение. Мобильные роботы (или всенаправленные платформы), способные осуществлять движение в любом направлении, широко применяются в военной, медицинской, образовательной и промышленной областях человеческой деятельности [1, 2] . Возможность всенаправленного движения может быть достигнута за счет оснащения мобильной платформы омни-колёсами различного вида (меканум-колёса, классические омни-колёса). Для обеспечения высокой точности позиционирования всенаправленных платформ требуется разработать их детальные математические модели, используемые при построении системы управления движением. Необходимость обеспечения высокой точности движения связана с потребностью обеспечить автономное функционирование всенаправленных платформ.
Зачастую при математическом моделировании кинематики меканум-колёс принимаются допущения, упрощающие описание движения таких колёс, об этом, например, идет речь в [3 –5] . Так, в работах [3, 4] рассматривается динамика меканум-платформы с учетом сил сухого трения качения и условий непроскальзывания точек контакта, выражающихся неголономными связями. А в статье [5] отмечается, что интерес представляет исследование влияния конечных линейных размеров роликов и вибраций, связанных с этим эффектом, на динамику меканум-платформы.
Механика
Актуальными направлениями исследований всенаправленных колёс являются моделирование влияния конструкции роликов меканум-колёс и оптимизация формы роликов [6–9]. Необходимость оптимизации формы роликов связана с тем, что при некоторых формах роликов омни-колёс могут возникать вертикальные вибрации точек контакта при движении всенаправленных платформ (подробнее см. в обзоре патентов [10]).
Другим фактором, существенно влияющим на точность позиционирования меканум-платформы, является проскальзывание точек контакта меканум-колёс с опорной поверхностью. Одним из способов учета проскальзывания точек контакта при описании кинематики является использование допущения, что скорость скольжения пропорциональна произведению угловой скорости вращения колеса и радиуса меканум-колеса, причем коэффициент пропорциональности считается постоянным [11, 12] . Это допущение позволяет свести уравнения кинематики к задаче с неголономными связями. Однако результаты экспериментов показывают, что указанный коэффициент изменяется при движении платформы [13, 14] .
Стоит отметить, что из-за непростой конструкции меканум-колёс при построении меканум-платформ могут возникать различные погрешности изготовления, в том числе погрешность установки меканум-колёс на платформу, малые отклонения формы роликов и др. Влияние погрешностей установки меканум-колес на точность движения платформы ранее не исследовалось. В рамках данной работы будет исследовано влияние неточностей установки меканум-колёс на точность позиционирования всенаправленной платформы и её кинематику.
Для достижения поставленной в статье цели, то есть для оценки ошибок позиционирования, возникающих из-за конструкционных погрешностей в установке меканум-колёс, и анализа их влияния на точность движения всенаправленной меканум-платформы, необходимо построить математическую модель движения такой платформы с учетом конструкционных погрешностей в установке меканум-колёс. Полученная математическая модель позволит исследовать их влияние на точность позиционирования мобильной платформы. Эта модель может быть применена для формирования управления, компенсирующего погрешности позиционирования платформы.
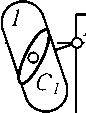
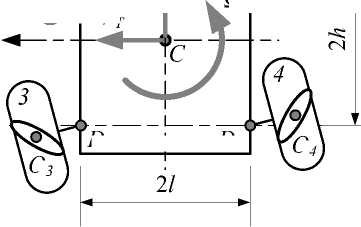
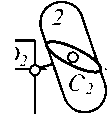
Материалы и методы. Описание конструкции робота. Как основа для данного исследования рассматривается модель робота в виде прямоугольной платформы с четырьмя меканум-колёсами при его движении по горизонтальной плоскости (рис. 1). При этом учитываются погрешности, связанные с неортогональностью осей вращения колёс и продольной оси платформы.
Для описания кинематики робота вводится подвижная система координат Cxyz , связанная с платформой робота и началом в геометрическом центре платформы.
При математическом моделировании используются следующие обозначения: h — половина расстояния между осями колёсных пар (при ортогональных осях колёс); l — половина ширины платформы; xi и yi — абсцисса и ордината точк и Di крепления привода i -го колеса к платформе; Oi — геометрический центр i -го меканум-колеса; VL , VT — продольная и поперечная скорости геометрического центра платформы; s = DiOi — длина вала привода; Ω — угловая скорость верчения платформы; α i — угол между осью Cx и осью вращения i -го колеса (параллельной вектору -0, - 0 , -) (рис. 1). Номера колёс платформы указаны на схеме на рис. 1, а эллипсами на колёсах показано расположение контактирующих роликов каждого колеса.
x
O 1
D 1 D
V L
VT
y
D 3
O 4
O 3
Рис. 1. Кинематическая схема платформы
D4
O 2
Ω
Описание метода построения кинематической модели. Движение платформы будем описывать в рамках неголономной постановки задачи, используя упрощенную модель меканум-колёс: колесо моделируется диском радиусом R , а точка контакта может проскальзывать относительно направления, перпендикулярного оси контактирующего ролика. При этом в случае отсутствия погрешности в расположении осей колёс существует связь между угловыми скоростями вращения колёс вокруг собственной оси ф, и скоростями платформы
V l , V t ,Q [15] :
ф, = — [ VL + VT tan 5, - (y, - x, tan5,)Q], R где 5, — угол между направлением оси контактирующего ролика и плоскостью меканум-колеса.
Для исследования влияния конструкционных погрешностей необходимо описать зависимость между угловыми скоростями колёс ф , и скоростями платформы V L , VT , Q при учете погрешностей, связанных с расположением осей колёс. Параметры конструкции платформы и расположения колёс приведены в таблице 1.
Таблица 1
Параметры конструкции платформы
|
i |
xi |
yi |
5 , |
а , |
di |
|
1 |
h |
l |
- 45 ° |
90° + Аа , |
s |
|
2 |
h |
- 1 |
45 ° |
-90° + Аа2 |
- 5 |
|
3 |
- h |
l |
45 ° |
90° + Аа3 |
s |
|
4 |
- h |
- 1 |
- 45 ° |
-90° + Аа4 |
- 5 |
Здесь Аа , — угол, характеризующий неортогональность осей колёс и продольной оси платформы Cx ; di — проекция вектора D,O* на собственную ось вращения i-го колеса.
Результаты исследования. Описывая кинематику меканум-платформы в рамках неголономной механики, как это было сделано в работах [3-5], при отсутствии конструкционных погрешностей (Аа, = 0), определяем условие непроскальзывания точки контакта вдоль оси контактирующего ролика:
VK,x cos (5i + Аа. ) + VK,y sin (5i + Аа, ) = 0,(2)
где VKx,VKy — проекции скорости точки Ki контакта i-го колеса с опорной поверхностью, которые определяются из векторного уравнения: ---------*
VK = VC + Q„x CO, + m,x O,K,.
KiCPiiii
Здесь V k , =[ V k , x V^ 0 ] T — вектор скорости точки K контакта -го колеса с опорной поверхностью в проекциях на оси подвижной системы координат Cxyz ; V C = [ V L VT 0 ] T — вектор скорости геометрического центра платформы в проекциях на оси Cxyz ; Q P = [ 0 0 Q ] T — вектор угловой скорости платформы в
* * *
проекциях на оси Cxyz ; CO, = CO, + O,D, = [xi - di sin Аа, yi + di cos Аа, 0] — радиус-вектор, соединяющий геометрические центры платформы C
и -го колеса O , в проекциях на оси Cxyz ;
m , = [ ф , . sin Аа , ф , . cos Аа , Q ] T — вектор угловой скорости в проекциях на оси Cxyz ; O , K, = [ 0 0 - R ] T — радиус-вектор, соединяющий геометрический центр i -го колеса Oi и точку контакта ролика Ki .
Переписывая векторное уравнение (3) и используя кососимметрические матрицы для вычисления векторных произведений, перепишем уравнение (3) в матричной форме:
|
V^ 1 |
[ VL 1 |
■ 0 |
-Q |
0 1 |
[ x |
- d i sin Аа , |
■ 0 |
-Q |
ф , cos Аа , |
■ 0 1 |
|||
|
V y |
= |
V VT |
+ |
Q |
0 |
0 |
y , |
+ d , cos Аа , |
+ |
Q |
0 |
-ф , sin Аа , |
0 |
|
_ 0 ] |
_ 0 _ |
_ 0 |
0 |
0 _ |
[ |
0 _ |
-ф , cos Аа , |
ф , sin Аа , |
0 _ |
- R |
.
После проведения вычислений:
VKx = V L - Q ( y i + d i cos Аа, ) - R ф, cos Аа, ,
V
=
VT
+Q
(
x,
-
d,
sin
Аа,
)
-
R
Аа,
.
Ki yTiiiii После переноса параметров платформы из таблицы 1 в уравнения связей (2) с учетом (5) представить в виде: их можно Механика
Отметим, что в при отсутствии погрешностей крепления осей двигателей колёс
(
Аа
i
= 0
)
уравнения (6)
принимают вид:
ideal
Ф
1
=
-[
VL
-
V 1
L
L
=
1
[
V
L
+
V
T
-
(
h
+
1
)
q|
,
Ф
2
dea1
=
1
[
V
L
+
V
T
=
1
[
VL
-
V
T
+
(
h
+
1
)
Q|
,
(7)
(i
3"
-
(
h
+
1
)
q|
,
Ф
,
c
ea1
+
(
h
+
1
)
Q]
.
Ф
1
=
1
V
VT
-
(
h
+
1
)
Q]
cos
Аа
1
+
~[
VL
+
V
T
+
(
h
-
1
)
Q]
sin
Аа
1 -
-
—
Q
,
R
Ф
2
=
1
[
V
L
+
V
t
+
(
h
+
1
)
Q]
cos
Аа
2
-
-1
[
VL
-
VT
-
(
h
-
1
)
Q]
sin
Аа
2
+
—
Q
,
R
Ф
3
=
1
[
VL
+
V
t
-
(
h
+
1
)
Q]
cos
Аа3 -
— [VL
R
-
VT
+
(
h
-
1
)
Q]
sin
Аа
3
-
—
Q
,
R
Ф
4
=
[
VL
R
T
+
(
h
+
1
)
Q]
cos
Аа4
+ — [
VL
R
+
VT
-
(
h
-
1
)
Q]
sin
Аа
4
+
—
Q
.
R
И совпадают с известными результатами
[6]
.
В матричной форме уравнения (6) и (7) можно представить в виде:
q
=
H
(
Аа
i
)
П, (8)
q
=
H
о тс, (9)
где П
=
[
VL V
T
Q
]
T
— вектор псевдоскоростей платформы;
q
=
[
Ф
1
Ф
2
ф
3
ф
4
]
т—
вектор угловых скоростей колёс;
H
(
Аа
i
) —
матрица коэффициентов при псевдоскоростях в уравнениях (6);
а
H
0 =
H
(
Аа
,
= 0
)
.
При формировании управления на кинематическом уровне по желаемым значениям псевдоскоростей платформы П
d
рассчитываются значения угловых скоростей платформы по формуле.
q
d
=
H
о
П
d
, (10)
где верхний индекс
d
указывает на желаемые (программные) значения скоростей. Полученные значения угловых скоростей подаются на вход системе управления двигателями колёс.
Однако при наличии неточностей крепления осей двигателей колёс по результатам отработки программных значений угловых скоростей колёс будет реализовано движение платформы в виде:
П =
(
H
т
(
Аа
,
.)
H
(
Аа
,
.)
)-
1
H
т
(
Аа
,
.)
q
d
=
(
H
т
(
Аа
,
.)
H
(
Аа
,
.)
)
-
1
H
т
(
Аа
,
.)
H
0
П
d
. (11)
По найденному выражению можно оценить погрешность отработки программного движения платформы, обусловленную наличием неточностей крепления осей двигателей колёс, по формуле:
АП = П-П
d
= [
(
H
т
(
Аа
,
)
H
(
Аа
,
)
)-
1
H
т
(
Аа
,
)
H
0
-
E
3
"|п
d
, (12)
где
E
3 — единичная матрица порядка 3.
Поскольку псевдоскорости платформы связаны с координатами геометрического центра в неподвижной системе отсчета соотношениями [15], xC = VL cos у - VT sin у, yC = VL sin у + VT cos V, (13) у = Q, то, учитывая погрешности псевдоскоростей, можно переписать указанные выражения в виде: xC = xC cos Ау-yC sin Ау + АVL cos (уd +Ау)-АVT sin(уd + Ау),
y
C
=
x
C
sin
Ау +
y
C
cos
Ау + А
V
L
sin
(
y
d
+ Ау
)
+А
VT
cos
(
y
d
+Ау
)
, (14)
у = у d + Ау, где xd = Vd cos уd - VT sin уd , ydc = Vd sin уd + VT cos уd — законы изменения скоростей геометрического центра платформы в неподвижной системе отсчета, соответствующие программному движению;
v
d
= y
d
(0)
+
J
Q
d
(
t
1
) dt
1
закон изменения угла курса платформы, соответствующий программному t движению; Ay = J AQ(t1)dt1 — погрешность угла курса.
С учетом введенных обозначений получим формулы для ошибок позиционирования в виде: A
x
C
=
x
C
(
cos Ay-1
)
-
y
C
sin Ay + A
V
L
cos
(
y
d
+Ay
)
-A
V
T
sin
(
y
d
+ Ay
)
, A
y C
=
x
C
sin Ay +
y
C
(
cos Ay-1
)
+A
V
L
sin
(
y
d
+ Ay
)
+A
V
T
cos
(
y
d
+ Ay
)
.
В качестве числового примера для оценки погрешностей рассмотрим параметры робота KUKA youBot
[16]
:
h
= 0.235 м,
l
= 0.14 м,
R
= 0.05 м,
5
= 0.01м.
В качестве примера примем погрешности крепления осей двигателей колёс равными
Aa
1
= Aa2 = 1°, Aa3 = Aa
4
= 2°.
Ниже приведем результаты расчета погрешностей скоростей платформы при простых движениях платформы. В качестве примеров простых движений платформы рассмотрим:
-
поступательное движение вперед:
V
L
= 1 м/с,
V
T
= 0 м/с, Q = 0 рад/с ;
-
поступательное движение влево:
V
L
= 0 м/с,
V
T
= 1 м/с, Q = 0 рад/с ;
-
вращение вокруг вертикальной оси, проходящей через геометрический центр платформы:
V
L
= 0 м/с,
V
T
= 0 м/с, Q = 1 рад/с .
Погрешности псевдоскоростей платформы при указанных движениях рассчитаем по формулам (12):
-
движение вперед:
A
V
L
=
1.35
-
10
-
4
м/с,
A
V
T
=-
8.73
-
10
-
3 м/с,
AQ =
6.8
-
10
-
2 рад/с ;
-
боковое движение влево:
A
V
L
=
8.72
-
10
-
3 м/с,
A
VT
=-
3.81
-
10
-
4
м/с,
AQ =
1.46
-
10
-
4
рад/с;
-
вращение вокруг вертикальной оси, проходящей через геометрический центр платформы:
A
V
L
=-
2.49
-
10
-
3 м/с,
A
VT
=-
4.22
-
10
-
5
м/с,
AQ =
1.97
-
10
-
4
рад/с.
Полученные значения погрешностей псевдоскоростей являются значительными для мобильных роботов с меканум-колёсами, поскольку приводят к отклонениям по координатам порядка 10 см за 2 минуты движения робота. Это делает недопустимым функционирование меканум-платформы в автономном режиме в случае отсутствия компенсации указанных погрешностей позиционирования. Отметим, что наличие ненулевой погрешности угловой скорости вращения платформы приводит к нелинейному росту ошибки позиционирования платформы (формулы (15) при рассмотрении управления на кинематическом уровне.
Данные результаты позволяют сделать вывод о необходимости учета неточностей крепления осей колёс при построении системы управления. Отметим, что, поскольку погрешности крепления осей двигателей колёс являются неизвестными величинами, то для их определения требуется разрабатывать методики идентификации параметров математической модели движения робота
[16]
.
Применение разработанной кинематической модели меканум-платформы, учитывающей неточности крепления осей двигателей колёс, даст возможность построить управление на кинематическом уровне с большей точностью позиционирования. Таким образом, в рамках данной работы представлена модель кинематики мобильной платформы с меканум-колёсами при наличии погрешности установки осей двигателей колёс. Получена формула для оценки погрешностей псевдоскоростей платформы при программном управлении, формируемом на кинематическом уровне. Проведены оценки погрешностей отработки программного движения для простых движений меканум-платформы (движение вперед, боковое движение влево и вращение на месте).
Обсуждение и заключение.
Полученная кинематическая модель мобильной платформы с меканум-колёсами может быть использована для повышения точности позиционирования за счет формирования управления движением платформы, компенсирующего влияние неточностей установки колёс. Для использования полученной модели в задачах управления меканум-платформой необходимо разработать в будущем методики идентификации параметров математической модели.
В качестве направления для дальнейших исследований в этой области можно назвать разработку математической модели динамики меканум-платформы с учетом погрешностей установки осей двигателей колёс. Механика
Список литературы Анализ точности позиционирования при конструкционных погрешностях в установке меканум-колёс мобильной платформы
- Adascalitei F., Doroftei I. Practical Applications for a Mobile Robots Based on Mecanum Wheels - A Systematic Survey. The Romanian Review Precession Mechanics, Optics & Mechatronics. 2011;40:21-29.
- Juhairi M.A.S. Holonomic and Omnidirectional Locomotion Systems for Wheeled Mobile Robots: A Review. Jurnal Teknologi (Sciences & Engineering). 2015;77(28):91-97. https://doi.org/10.11113/jt.v77.6799
- Hendzel Z., Rykala L. Modeling of Dynamics of a Wheeled Mobile Robot with Mecanum Wheels with the Use of Lagrange Equations of the Second Kind. International Journal of Applied Mechanics and Engineering. 2017;22(1):81-99. https://doi.org/10.1515/ijame-2017-0005
- Hendzel Z., Rykala L. Description of Kinematics of a Wheeled Mobile Robot with Mecanum Wheels. Modeling in Engineering. 2015;57:5-12.
- Zeidis I., Zimmermann K. Dynamics of a Four-Wheeled Mobile Robot with Mecanum Wheels. Journal of Applied Mathematics and Mechanics. 2019;99(12):e201900173. https://doi.org/10.1002/zamm.201900173
- Adamov B.I. Influence of Mecanum Wheels Construction on Accuracy of the Omnidirectional Platform Navigation (on Example of KUKA youBot Robot). In: Proc. 25th Saint Petersburg Int. Conf. on Integrated Navigation (ICINS). New York City: IEEE; 2018. P. 1-4. https://doi.org/10.23919/ICINS.2018.8405889
- Palacin J., Martinez D., Rubies E., Clotet E. Suboptimal Omnidirectional Wheel Design and Implementation. Sensors. 2021;21(3):865. https://doi.org/10.3390/s21030865
- Kyung-Lyong Han, Oh-Kyu Choi, Jinwook Kim, Hyosin Kim, Jin S. Lee. Design and Control of Mobile Robot with Mecanum Wheel. In: Proc. Int. Conf. on Control, Automation and Systems (ICCAS-SICE). New York City: IEEE; 2009. P. 2932-2937.
- Sun Wencheng, Li Shuge, Wang Weiqiang, Zhao Pengju, Yang Renqiang. Design of Chassis and Kinematics Research of Wheeled Robot. In: Proc. IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference. New York City: IEEE; 2020. P. 2405-2408. https://doi.org/10.1109/ITNEC48623.2020.9085044
- Junpeng Shao, Tianhua He, Jingang Jiang, Yongde Zhang. Recent Patents on Omni-Directional Wheel Applied on Wheeled Mobile Robot. Recent Patents on Mechanical Engineering. 2016;9(3):215-221. https://doi.org/10.2174/2212797609666160616091009
- Dianfeng Zhang, Guangcang Wang, Zhaojing Wu. Reinforcement Learning-Based Tracking Control for a Three Mecanum Wheeled Robot. In: Proc. IEEE Transactions on Neural Networks and Learning Systems. New York City: IEEE; 2022. P. 1-8. https://doi.org/10.1109/TNNLS.2022.3185055
- Danwei Wang, Chang Boon Low. Modeling and Analysis of Skidding and Slipping in Wheeled Mobile Robots: Control Design Perspective. IEEE Transactions on Robotics and Automation. 2008;24(3):676-687. https://doi.org/10.1109/TRQ.2008.921563
- Yunwang Li, Shirong Ge, Sumei Dai, Lala Zhao, Xucong Yan, Yuwei Zheng, et al. Kinematic Modeling of a Combined System of Multiple Mecanum-Wheeled Robots with Velocity Compensation. Sensors. 2019;20(1):75. https://doi.org/10.3390/s20010075
- Li Xie, Christian Henkel, Karl Stol, Weiliang Xu. Power-Minimization and Energy-Reduction Autonomous Navigation of an Omnidirectional Mecanum Robot via the Dynamic Window Approach Local Trajectory Planning. International Journal of Advanced Robotics Systems. 2018;15(1):1-12. https://doi.org/10.1177/1729881418754563
- Adamov B.I. A Study of the Controlled Motion of a Four-Wheeled Mecanum Platform. Russian Journal of Nonlinear Dynamics. 2018;14(2):265-190. https://doi.org/10.20537/nd180209
- Адамов Б.И., Кобрин А.И. Идентификация параметров математической модели мобильной роботизированной платформы всенаправленного движения KUKA youBot. Мехатроника, автоматизация, управление. 2018;19(4):251-258. https://doi.org/10.17587/mau.19.251-258
