Анализ возможностей, оптимизация массы и энергопотребления лазерного высотомера для управления спуском с окололунной орбиты

Автор: Зубов Николай Евгеньевич, Савчук Дмитрий Владимирович, Старовойтов Евгений Игоревич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Бортовые и наземные комплексы управления и системы
Статья в выпуске: 1 (4), 2014 года.
Бесплатный доступ
Выполнен системный анализ факторов, оказывающих влияние на работу лазерного высотомера для управления спуском с окололунной орбиты. Благодаря использованию метода поиска множеств Парето решена задача оптимизации энергопотребления и массы лазерного высотомера по критериям массы приемного объектива и мощности, потребляемой лазерными источниками, в качестве которых рассматривались твердотельные лазеры с диодной накачкой. В результате определены значения массы и потребляемой мощности, которые удовлетворяют требованиям для существующих моделей приборов.
Лазерный высотомер, космический аппарат, спуск, луна, парето-оптимизация, твердотельный лазер
Короткий адрес: https://sciup.org/14343433
IDR: 14343433 | УДК: 629.785.05:621.375.826:528.8
Analysis of possibilities, optimization of mass and of power consumption for a laser altimeter controlling the descent of a spacecraft from the lunar orbit
A systematic analysis of factors influencing the operation of a laser altimeter controlling the descent of a spacecraft from the lunar orbit was completed. By using the method of searching for Pareto sets, a solution was found for the problem of optimizing power consumption and mass of a laser altimeter by the criteria of the mass of the receiving lens and the power consumed by the laser sources, which were assumed to be solid-state diode-pumped lasers. As a result, mass and consumed power values were found which meet the requirements for the existing models of these devices.
Текст научной статьи Анализ возможностей, оптимизация массы и энергопотребления лазерного высотомера для управления спуском с окололунной орбиты
Осуществление экспедиций на Луну пилотируемыми космическими аппаратами (КА) подразумевает выполнение операций управляемого спуска (посадки) на поверхность лунного взлетно-посадочного комплекса. Для управления этой операцией могут быть использованы бортовые лазерные высотомеры (ЛВ) [1], обеспечивающие измерение высоты и скорости снижения.
К настоящему времени созданы ЛВ, предназначенные для топографической съемки под- стилающей поверхности планеты с борта КА, находящегося на орбите высотой 35…15 000 км, которые были использованы при выполнении полетов к другим планетам [2-5]. Для управления спуском на поверхность Фобоса автоматического КА «Фобос-Грунт» ОАО «Государственный оптический институт им. С.И. Вавилова» был разработан лазерный высотомер-вертикант (ЛВ-В) [6].
Сравнительные характеристики бортовых ЛВ, разработанных для различных автоматических КА, предназначенных для полетов к другим планетам, представлены в табл. 1.
Таблица 1
Сравнительные характеристики бортовых ЛВ разных конструкций
|
Параметр |
Значение |
||||||
|
КА-носитель |
Clementine |
NEAR Shoemaker |
Mars Global Surveyor |
MESSENGER |
BepiColombo |
LRO |
Фобос-Грунт |
|
Планета назначения |
Луна |
Эрос |
Марс |
Меркурий |
Меркурий |
Луна |
Фобос |
|
Название прибора |
LIDAR [4] |
NLR [4] |
MOLA [4] |
MLA [4] |
BELA [4] |
LOLA [5] |
ЛВ-В [6] |
|
Диапазон дальностей, км |
400…8 300 |
35…50 |
400 |
200…15 000 |
400…1 500 |
50 |
0,5…100 |
|
Энергия импульса, мДж |
171 |
15,3 |
42 |
20 |
50 |
2,7 |
1…36 |
|
Длительность импульса, нс |
4,2 |
5,1 |
3,4 |
2,5 |
3,4 |
6 |
10 |
|
Расходимость зондирующего пучка, мкрад |
500 |
235 |
370 |
80 |
50 |
100 |
4,8 |
|
Погрешность измерения, м |
40 |
0,32 |
0,3 |
0,15 |
0,3 |
0,1 |
— |
|
Частота повторения импульсов, Гц |
0,6 |
0,125…8 |
10 |
8 |
10 |
28 |
250 |
|
Диаметр приемной апертуры, см |
13 |
9 |
50 |
10,6 |
25 |
14 |
— |
|
Масса, кг |
2,37 |
4,9 |
26,2 |
7,4 |
12 |
12,6 |
— |
|
Потребляемая мощность, Вт |
6,8 |
15,1 |
28 |
23 |
43 |
34 |
— |
В качестве источника излучения во всех указанных ЛВ используются твердотельные Nd : YAG -лазеры, излучающие на длине волны λ = 1,06 мкм с частотой повторения зондирующих импульсов 0,125…250 Гц. Особенностью конструкции ЛВ является большой диаметр приемной оптической апертуры (до 0,5 м). Расходимость зондирующих пучков может приближаться к дифракционной, а масса ЛВ разных конструкций отличается на порядок.
Для выбора места безопасной посадки определяют топографию поверхности бортовыми средствами. В работе [1] сформулированы требования к ЛВ, обеспечивающему безопасную посадку автоматических КА на Луну или Марс. Диапазон измеряемых высот составляет 10…5 000 м, при этом масса прибора не должна превышать 10 кг, а потребляемая мощность — 60 Вт. Предложена реализация ЛВ на основе комбинации линейного фотоприем-ного устройства (ФПУ) и оптико-механического сканирования [1].
Так как Луна не имеет атмосферы, то во время спуска единственным средством для торможения и выполнения безопасной посадки является тормозная двигательная установка, для управления которой необходимы данные о высоте над поверхностью и скорости снижения. Поэтому на борту КА необходима установка ЛВ, обеспечивающего надежные измерения во всем диапазоне высот (0,5…100 км). Аналогичный радиовысотомер будет иметь вдвое большую массу и потребляемую мощность [7], поэтому преимущества имеет ЛВ.
Анализ возможностей ЛВ для управления спуском с окололунной орбиты
Для импульсного лазерного высотомера максимальную измеряемую высоту D можно оценить по выражению [8]
D =
Елdв2хρп τпер τпр , 4qE пор
где Е л — энергия лазерного импульса; d вх — диаметр входного зрачка приемного объектива; q — отношение сигнал/шум; ρ п — коэффициент отражения подстилающей поверхности планеты (альбедо); Е пор — пороговая регистрируемая ФПУ энергия принятого сигнала; τ пер , τ пр — коэффициенты пропускания передающего и приемного оптических трактов.
В дальномерных и локационных системах, разрабатываемых в настоящее время, кроме твердотельных лазеров с диодной накачкой (на основе кристаллов Nd:YAG и эрбиевого стекла) используются также полупроводниковые лазерные диоды (ЛД) и волоконные лазеры (ВЛ) [9, 10, 11].
Энергия импульсов и масса разных типов лазеров указаны в табл. 2.
Таблица 2
Энергия и мощность импульсов для разных типов лазеров [9, 10, 11]
|
Тип лазера |
Активный элемент |
Длина волны, мкм |
Энергия импульса, Дж |
Масса, кг |
|
Решетка ЛД |
AlGaAs/GaAs |
0,86 |
50⋅10–6 |
— |
|
Твердотельные лазеры с диодной накачкой |
Nd:YAG |
1,06 |
150…200⋅10–3 |
5,0 |
|
ПГС на основе Nd:YAG |
1,57 |
15…50⋅10–3 |
5,0 |
|
|
Er: стекло |
1,54 |
5…20⋅10–3 |
0,2…5,0 |
|
|
ВЛ |
— |
1,06…1,55 |
200…500⋅10–6 |
12,0 |
Примечание: ПГС — параметрический генератор света.
Из данных, представленных в табл. 2, следует, что наибольшую энергию импульса обеспечивают твердотельные Nd:YAG -лазеры. Именно этим объясняется, что они использованы во всех конструкциях ЛВ, указанных в табл. 1. При этом наибольший КПД имеют полупроводниковые ЛД (свыше 30%), следом идут ВЛ и твердотельные Nd:YAG -лазеры (до 20%), а уже потом лазеры на эрбиевом стекле, имеющие при сравнении наименьшую эффективность (около 1%).
В то же время необходимо отметить, что применение ЛВ для управления спуском в районе обитаемой лунной станции потребует обеспечения безопасности для ее персонала, находящегося на поверхности.
Наличие наблюдателей на поверхности потребует обеспечения лазерной безопасности для их органов зрения так же, как при эксплуатации лазерных локационных систем (ЛЛС) для управления сближением и стыковкой КА. В связи с этим может быть целесообразным использование спектрального диапазона 1,54…1,57 мкм (более безопасного для органов зрения).
Таким образом, необходимо рассмотреть использование Nd:YAG -лазеров с преобразованием длины волны (параметрических генераторов света — ПГС) и эрбиевых лазеров.
Для получения достоверного измерения дальности отношение сигнал/шум на практике выбирается не менее q = 3 [8], а обычно оно составляет q = 7…10 [12]. Значению q = 10 соответствуют вероятности ложной тревоги и пропуска сигнала порядка 10–6, что обеспечивает приемлемую надежность измерений. Дальнейшее повышение может ограничиваться лимитами энергопотребления на борту. Таким образом, используемый на практике диапазон q = 3…10.
Очевидно, что для обеспечения макси- мальной дальности следует использовать зон- дирующий пучок с наименьшей расходимостью. Как следует из табл. 1, в большинстве
ЛВ зондирующий пучок имеет расходимость, близкую к дифракционной.
Дифракционную расходимость γдиф зондирующего пучка можно определить по форму- ле Эйри
γ диф
2,44 λ
d
пер
где λ — длина волны зондирующего излучения; d пер — диаметр передающей оптической апертуры.
Необходимо отметить, что, исходя из массогабаритных ограничений, конструктору надо стремиться к тому, чтобы использовать излучающую апертуру небольшого диаметра.
Для d пер = 5 см дифракционная расходимость зондирующего пучка составляет 51,7 мкрад на λ = 1,06 мкм и 75,1 мкрад на λ = 1,54 мкм.
Использование узких зондирующих пучков ЛВ, совмещенных с узким полем зрения приемника, на больших дальностях может затрудняться явлением скоростной аберрации. Угловое смещение α а вследствие аберрации скорости определяется соотношением [3]
α
a
2 u ,
c
где υ — горизонтальная составляющая скорости движения КА относительно подстилающей поверхности.
Однако, если учитывать, что первая космическая скорость для Луны составляет всего 1,7 км/с, то аберрация скорости не превысит 11,3 мкрад, и этот эффект можно не учитывать из-за большой расходимости зондирующих пучков у большей части ЛВ (см. табл. 1).
Лунная поверхность имеет светотехнические особенности, заключающиеся в низкой отражательной способности и относительной однородности (отношение отражательной способности самых светлых и самых темных областей составляет 3,5:1). Со сдвигом в ближнюю инфракрасную область альбедо лунной поверхности увеличивается [13].
Дальше в спектральном диапазоне 0,8…1,6 мкм альбедо меняется сравнительно медленно, и для оценки примем его значение ρ п = 0,1.
Освещенная Солнцем лунная поверхность создает рассеянное излучение, которое представляет собой фон, на котором необходимо выделить полезный сигнал. Мощность фоновой засветки ФПУ P фз можно оценить с помощью выражения [3, 8]
1 ρ B Ω S τ , P фз = π п λ пр пр пр , (4)
где В λ — освещенность лунной поверхности в данном спектральном диапазоне; Ω пр — телесный угол поля зрения приемной оптической системы; S пр — площадь входного зрачка приемной оптической системы.
Используем модель, аппроксимирующую Солнце абсолютно черным телом с температурой 6 000 К. Тогда можно определить спектральное распределение мощности излучения Солнца, испускаемого единицей поверхности, по закону Планка
Q X- x ,
B = c r *( X, T ) d X;
X П
X i
r *( λ, T ) =
2 π hc 2
λ 5 exp
hc kT λ
–1
λ 2 – λ 1 = Δλ, (7)
где Ω с = 6,8∙10–5 ср — телесный угол, в котором наблюдается Солнце с Земли и окололунной орбиты; Δλ — оптическая полоса пропускания (ограничивается интерференционным фильтром); h = 6,63∙10–34 Дж∙с — постоянная Планка; c = 3∙108 м/с — скорость света в вакууме; k = 1,38∙10–23 Дж/К — постоянная Больцмана; T — абсолютная температура, К; r * — спектральное распределение мощности излучения Солнца, испускаемого единицей поверхности.
Оценим влияние фоновой засветки на работу лавинного фотодиода (ЛФД), как наиболее чувствительного приемника. Шумовой ток ЛФД i ш составит [14]
4 kT
i
ш
∆ f
R
+ 2 e ( г T + n P ф 3 ) , (8)
где Δ f — полоса пропускания приемного тракта; k = 1,38∙10–23 Дж/К — постоянная Больцмана; R — сопротивление нагрузки; i Т — темновой ток ЛФД, А; е = 1,6·10–19 Кл — элементарный заряд электрона; η — токовая чувствительность ЛФД.
Мощность сигнала P ш , эквивалентная шуму, составляет
P = i T. (9)
ш η
Рассмотрим неблагоприятный случай — широкое поле зрения; рабочая длина волны относительно недалека от максимума излучения Солнца; широкая оптическая полоса пропускания: ω пр = 1,0 мрад (Ω пр = 7,85·10–7 ср); S пр = 3,14·10–2 м2 ( d вх = 20 см); λ = 1,06 мкм и Δλ = 20 нм. Пропускание приемного тракта составляет τ пр = 0,7. Фоновая засветка будет равна Р фз = 7,64·10–9 Вт.
ЛФД имеет характеристики i Т = 100 нА и η = 10 А/Вт. При емкости 1 пФ сопротивление нагрузки выбирается равным R = 10 кОм. Для оценки теплового шума абсолютная температура принимается равной 300 К. Мощность сигнала, эквивалентная шуму, согласно выражению (9), составит Р ш = 1,2·10–9 Вт.
При длительности импульса t и = 10 нс ширина полосы пропускания составит
A f = 2;
t и (10)
Δ f = 200 МГц.
Шумовой ток ЛФД при отсутствии помех согласно выражению (8) будет равен i ш = 18,2 нА, а шумовой ток при наличии фоновой засветки i фз = 18,3 нА.
Для оценки влияния фоновой засветки введем коэффициент ухудшения пороговой чувствительности приемника [15]
i
∆ζ = i фз ;
ш (11)
ζ = 1,01.
Таким образом, рассеянное солнечное излучение от лунной поверхности не оказывает заметного влияния на работу ЛВ, если ФПУ выполнено на основе ЛФД.
Существенно облегчает работу ЛВ отсутствие на Луне атмосферы и, соответственно, энергетических потерь при проходе через нее оптического излучения.
Для каждого из типов лазеров по выражению (1) оценим в первом приближении максимальную высоту измерений ЛВ. Выбираем максимальное отношение сигнал/шум ( q = 10) и средний диаметр входного зрачка приемного объектива ( d вх = 10 см).
Потери в передающем и приемном оптическом тракте примем равными τ пер = τ пр = 0,7, пороговую энергию ФПУ Е пор = 10–16 Дж.
В табл. 3 представлены полученные значения измеряемой высоты для соответствующих энергий зондирующих импульсов, а также отношения сигнал/шум и диаметра приемного объектива.
Таблица 3
Соотношение значений измеряемых ЛВ высот и энергии зондирующих импульсов разных типов лазеров при разных исходных данных
|
Тип лазера |
Энергия зондирующего импульса, Дж |
D , км |
|
Решетка ЛД |
50⋅10–6 |
2,47 |
|
ВЛ |
500⋅10–6 |
7,83 |
|
Nd:YAG -лазер |
100⋅10–3 |
110,68 |
|
Эрбиевый лазер |
10⋅10–3 |
35,0 |
На рис. 1 представлена диаграмма перекрытия диапазона измеряемых дальностей разными типами лазеров.
Таким образом, прикидочный расчет показывает, что по энергетике для использования в ЛВ наилучшим образом подходят Nd:YAG -лазеры, обеспечивающие измерения высот свыше 100 км при отношении сигнал/шум q = 10 и небольшом диаметре приемного объектива. Однако Nd:YAG -лазер имеет относительно невысокий КПД (до 20%), что может привести к ограничению энергии и частоты повторения зондирующих импульсов из-за лимитов энергопотребления на борту КА. В этом случае придется увеличивать диаметр приемного объектива, также имеющий ограниченные значения.

Рис. 1. Диаграмма перекрытия диапазона измеряемых дальностей для разных типов лазеров: ■ — решетка лазерных диодов, ■ — волоконный лазер, ■ — эрбиевый лазер, ■ — Nd'.YAG-лазер
При выборе параметров ЛВ, обеспечивающих выполнение целевых задач, приходится сталкиваться с конструктивными ограничениями. Поэтому в процессе разработки аппаратуры возникает необходимость выполнения многокритериальной оптимизации.
Парето-оптимизация массы и потребляемой мощности ЛВ
Оптимизация параметров ЛЛС и уголковых отражателей для управления сближением КА по нескольким критериям рассмотрена в работах [16, 17]. Там же предложено использование метода поиска множеств Парето (Парето-оптимизация) для решения этих задач, и представлен соответствующий математический аппарат.
Парето-оптимизация позволяет выделить множество решений, где уменьшение значения одного критерия приводит к увеличению значений других критериев, из которых впоследствии можно выбрать наиболее приемлемые для технической реализации.
В работах [16, 17] при оптимизации параметров ЛЛС не были рассмотрены такие критерии, как потребляемая мощность и масса аппаратуры.
Эти величины можно выразить через энергию зондирующего импульса и диаметр входного зрачка приемного объектива ( Е з и d вх ). Последние два параметра легко варьировать для получения необходимых характеристик ЛВ.
Из табл. 1 следует, что масса существующих аналогов ЛВ лежит в пределах 2,37…26,2 кг, а потребляемая мощность составляет 6,8…43,0 Вт. В качестве ограничений возьмем средние значения 10 кг и 15 Вт.
Энергопотребление лазерного источника ЛВ оценивается следующим образом. Если лазер излучает зондирующие импульсы излучения с частотой f , то средняя мощность лазерного излучения будет равна
Р и = Е л f . (12)
При КПД лазера η л потребляемая им мощность составит
P
P л = и . (13) η л
Массу оптической системы можно оценить следующим образом. Для линзовых объективов масса пропорциональна третьей степени их диаметра
М = к п d вх 3, (14) где к п — коэффициент плотности заполнения конструкции объектива.
Примем, что максимальная высота измерений ЛВ составляет 100 км, потери в передающем и приемном оптическом тракте равны τ пер = τ пр = 0,7, пороговая энергия ФПУ составляет Е пор = 10–16 Дж, а отношение сиг-нал/шум q = 10. Частота повторения зондирующих импульсов f = 10 Гц.
Для определения массы приемного объектива по выражению (14) принимаем к п = = 3 000 кг/м3, т.е. объектив с диаметром входного зрачка 10 см будет иметь массу 3 кг. С учетом ограничений массы ЛВ (на приемный объектив выделяем не более 50% — 5 кг) и потребляемой лазером мощности (которая зависит от размеров входного зрачка ~1/ d вх 2), диаметр входного зрачка будет находиться в диапазоне 7…12 см.
Для лазерного источника примем допущение, что Nd:YAG-лазер и эрбиевый лазер имеют одинаковую массу, пропорциональную мощности излучения (определяется размерами активного элемента, резонатором, количеством диодов накачки). Как видно из табл. 2, масса данных типов лазеров может изменяться в диапазоне 0,2…5,0 кг.
Теперь оценим максимальную высоту измерений ЛВ по формуле (1) при диаметре входного зрачка d вх = 7…12 см для лазеров с разной энергетикой (при q = 10). Nd:YAG -лазер с энергией импульса 50…200 мДж обеспечивает высоту измерения до 100 км. При использовании ПГС на основе Nd:YAG -лазера (энергия импульса 15…50 мДж) максимальная измеряемая высота снижается до 50 км, а для эрбиевого лазера (энергия импульса 5…20 мДж) она будет равна 30 км.
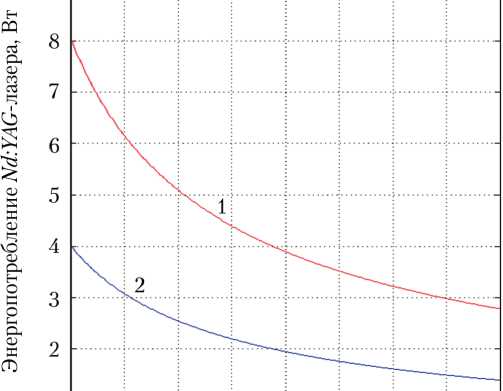
Рассмотрим Nd:YAG -лазер, имеющий КПД η л = 0,2, и ПГС на его основе (с преобразованием излучения с длиной волны λ = 1,06 мкм в излучение с длиной волны λ = 1,57 мкм), имеющий эффективность преобразования 0,5. Множества Парето для массы приемного объектива ЛВ и энергопотребления Nd:YAG -лазера и ПГС на его основе представлены в виде кривых на рис. 2.
1 1 1,5 2 2,5 3 3,5 4 4,5 5
Масса приемного объектива, кг
Рис. 2. Множества Парето для массы приемного объектива лазерного высотомера и энергопотребления лазерных источников: 1 — Nd:YAG-лазер; 2 — параметрический генератор света на основе Nd:YAG-лазера
Принадлежность кривых к множеству Парето подтверждается методом «обхода конусом». Массе приемного объектива в 1,5 кг ( d пр = 8 см) соответствует энергопотребление Nd:YAG -лазера около 6 Вт. Если потребляемая мощность электроники составляет 4 Вт, то суммарное энергопотребление будет равно 10 Вт. При КПД источника питания η п = 0,7 мощность, подводимая к ЛВ, должна быть не менее 14,3 Вт.
Nd:YAG- лазер с указанной мощностью будет иметь массу около 4 кг, 0,5 кг составляет масса объектива передающей оптической системы, масса электроники равна 3 кг, корпус имеет массу 1 кг. Тогда суммарная масса ЛВ составит 10 кг. В результате ограничения не превышены.
При отклонении от данной точки картина меняется. Массе приемного объектива 3,5 кг соответствует потребляемая мощность лазера 3,5 Вт. Суммарная потребляемая мощность ЛВ составит 10,7 Вт. Если масса лазера равна 2,5 кг, то суммарная масса ЛВ возрастет до 10,5 кг, что превышает допустимый лимит.
Минимальная масса приемного объектива 1 кг при потребляемой мощности лазера 8 Вт (и его массе 5 кг) соответствует суммарной массе ЛВ 10,5 кг и потребляемой мощности 17,1 Вт, что также превышает установленные ограничения.
При использовании ПГС на основе Nd:YAG -лазера в точке, соответствующей массе приемного объектива 1,5 кг, показатели ЛВ составят 9 кг (при массе лазера 3 кг) и 10 Вт, что не превышает ограничения по массе и потребляемой мощности.
Теперь рассмотрим эрбиевый лазер, имеющий КПД η л = 0,01. Примем, что его массовые характеристики соответствуют таковым для Nd:YAG -лазера. Существенным отличием является низкая энергетическая эффективность данного типа лазера, которая потребует ограничения либо измеряемой высоты, либо частоты повторения зондирующих импульсов.
На рис. 3 представлено множество Парето для массы приемного объектива ЛВ и энергопотребления эрбиевого лазера.
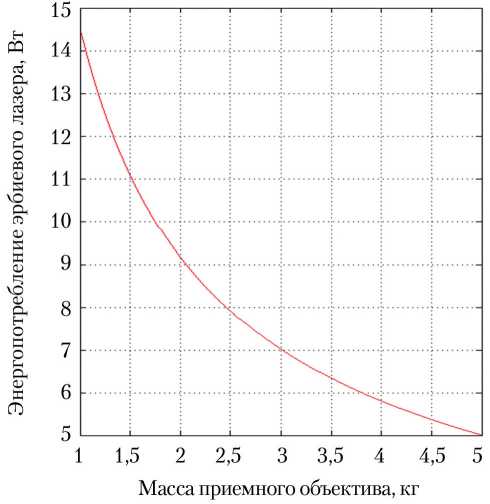
Рис. 3. Множество Парето для массы приемного объектива лазерного высотомера и энергопотребления эрбиевого лазера
Массе приемного объектива 4 кг соответствует потребляемая лазером мощность около 6 Вт. При массе лазера 0,5 кг показатели ЛВ составят 9 кг и 14,3 Вт, что не превышает установленные ограничения.
Суммарная масса ЛВ и потребляемая им мощность при использовании рассмотренных лазерных источников представлены в табл. 4.
Таблица 4
Суммарная масса ЛВ и потребляемая им мощность при использовании рассмотренных лазерных источников
|
Тип лазера |
Суммарная масса ЛВ, кг |
Суммарная потребляемая мощность ЛВ, Вт |
|
Nd:YAG -лазер |
10 |
14,3 |
|
Nd:YAG -лазер с ПГС |
9 |
10 |
|
Эрбиевый лазер |
9 |
14,3 |
Результаты исследований и их обсуждение
В работе были исследованы факторы, оказывающие влияние на работу ЛВ, предназначенного для измерения высот до 100 км при управлении спуском на поверхность Луны.
С использованием закона Планка для абсолютно черного тела, зонной теории внутреннего фотоэффекта и модели дробового шума исследовано влияние фоновой засветки от освещенной Солнцем лунной поверхности на работу ФПУ на основе ЛФД. Установлено, что фоновая засветка, создаваемая рассеянным солнечным излучением, не оказывает влияния на функционирование ЛВ.
Показано, что при измерении высот в диапазоне 10…100 км для использования в ЛВ больше всего подходят твердотельные лазеры с диодной накачкой.
Для достижения наилучших показателей ЛВ при заданных значениях высоты и отношения сигнал/шум с помощью метода поиска множеств Парето решена задача оптимизации массы и потребляемой мощности прибора. Эти параметры не учитывались в предыдущих работах по оптимизации параметров лазерной аппаратуры [16, 17].
Парето-оптимизация энергопотребления и массы ЛВ по критериям массы приемного объектива и мощности, потребляемой лазерным источником, выполнялась для измеряемых высот 30, 50 и 100 км, соответствующих используемым видам твердотельных лазеров: Nd:YAG -лазеру, ПГС на основе Nd:YAG -лазера и эрбиевому лазеру.
В результате получено множество решений, из которых выбраны значения, не превышающие ограничений 10 кг по массе и 15 Вт по потребляемой мощности, что соответствует характеристикам большинства моделей ЛВ.
Список литературы Анализ возможностей, оптимизация массы и энергопотребления лазерного высотомера для управления спуском с окололунной орбиты
- Pereira do Carmo J., Moebius B., Pfennigbauer M. Imaging lIdARs for Space Applications//Proc. of SPIE Vol. 706170610J-1. Режим доступа: http://www.sensl.com/downloads/irp/2008_doCarmo_Img_LIDAR_Space_Apps.pdf (дата обращения 14.01.2012 г.).
- Аспис Л.А., Васильев В.П., Волконский В.Б. и др. Лазерная дальнометрия//Под ред. Васильева В.П. и Хинрикус Х.В. М.: Радио и связь, 1995. 256 с.
- Козинцев В.И., Белов М.Л., Орлов В.М. и др. Основы импульсной лазерной локации: Учеб. пособие для вузов/Под ред. Рождествина В.Н. М.: Изд-во МгТу им. Н.Э. Баумана, 2010. 571 с.
- Santovito M.R., Hussman H., Oberst J., Lingenauber K. Europa Jupiter System Mission and Marco Polo Mission: Italian participation in studies of laser altimeters for Jovian moons and asteroids exploration. Режим доступа: http://sait.oat. ts.astro.it/MSAIS/16/PDF/35.pdf (дата обращения 02.08.2013 г.).
- Riris H., Cavanaugh J., Sun X. et al. The Lunar Orbiter Laser Altimeter (LOLA) on NASA’s Lunar Reconnaissance Orbiter (LRO) Mission. ICSO 2010 (International Conference on Space Optics), Rhodes Island, Greece, Oct. 4-8, 2010. Режим доступа: http://congrex.nl/ICSO/Papers/Session%203a/FCXNL-10A02-1985954-1-Riris_icso_paper_LOLA.pdf (дата обращения 02.08.2013 г.).
- Поляков В.М., Покровский В.П., Сомс Л.Н. Лазерный передающий модуль с переключаемой диаграммой направленности для дальномера космического аппарата//Оптический журнал. 2011. Т. 78. № 10. С. 4-9.
- Rozas P., Cunningham A.R. Apollo experience report Lunar Module landing Radar and RendezVous Radar. Режим доступа: http://www. hq.nasa.gov/alsj/ApolloLMRadarTND6849.pdf (дата обращения 08.08.2013 г.).
- Назаров В.Н., Балашов И.Ф. Энергетическая оценка импульсных лазерных дальномеров. СПбГУИТМО, 2002. 38 с. Режим доступа: http://de.ifmo.ru/bk_netra/start.php?bn=27 (дата обращения 19.01.2012 г.).
- Старовойтов Е.И., Савчук Д.В., Зубов Н.Е. Выбор лазеров для увеличения дальности бортовых локационных систем космических аппаратов//Наука и образование (МГТУ им. Н.Э. Баумана). 2013. №. 8. Электронное научно-техническое издание. Режим доступа: http://technomag.bmstu.ru/doc/609292.html (дата обращения 26.09.2013 г.).
- Институт физики им. Б.И. Степанова НАН Беларуси. Каталог разработок. Режим доступа: http://ifanbel.bas-net.by/russian/booklet_ russian.pdf (дата обращения 15.07.2013 г.).
- НТО ИРЭ-Полюс: Импульсные иттербиевые лазеры. Режим доступа: http://www. ntoire-polus.ru/products_low_ili.html (дата обращения 22.08.2013 г.).
- Ставров А.А., Поздняков М.Г. Импульсные лазерные дальномеры для оптико-локационных систем//Доклады БГУИР. Минск, 2003. Т. 1. № 2. С. 59-65.
- Старовойтов Е.И., Воробьев С.А. Оценка уровня фоновой засветки для оптико-электронной системы обеспечения сближения и стыковки космических аппаратов при межпланетных полетах//МГОУ-ХХ1-Новые технологии. 2009. № 5-6. С. 26-32.
- Малашин М.С., Каминский Р.П., Борисов Ю.Б. Основы проектирования лазерных локационных систем. М.: Высшая школа, 1983. 207 с.
- Рудь Е.Л. Импульсные высотомеры на основе твердотельных и полупроводниковых лазеров для контроля окружающей среды и характеристик объектов подстилающей поверхности. Дисс. канд. техн. наук. Казань, 2009. 152 с.
- Старовойтов Е.И., Савчук Д.В. Паретооптимизация параметров бортовых лазерных локационных систем космических аппаратов//Наука и образование (МГТУ им. Н.Э. Баумана). 2013. № 4. Электронное научно-техническое издание. Режим доступа: http://technomag. edu.ru/doc/574259.html (дата обращения 03.06.2013 г.).
- Старовойтов Е.И., Савчук Д.В. Исследование и оптимизация применения уголковых отражателей для локации космических объектов//Космическая техника и технологии. 2013. № 1. С. 38-43.
