Анализ зависимостей алгоритмов управления взаимосвязанными технологическими процессами

Автор: Коковин Валерий Аркадьевич
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 4, 2015 года.
Бесплатный доступ
В статье приведен анализ зависимостей алгоритмов управления взаимосвязанными технологическими процессами при автоматизации больших промышленных или научных комплексов. Такие системы, как правило, представляют собой набор технологических подсистем, распределенных территориально и алгоритмически, что требует разработки сетевой системы. Рассмотрен пример управления взаимосвязанными технологическими процессами в задаче автоматизации работы географически распределенными технологическими платформами, находящимися в неустойчивой среде. Необходимо поддерживать определенное положение поверхности платформ методом распространения лазерного луча через все платформы. Анализируется зависимость управляющих алгоритмов и на основании этого анализа формируются требования к сетевой телекоммуникационной системе.
Взаимосвязанные технологические процессы, зависимости алгоритмов управления
Короткий адрес: https://sciup.org/14122628
IDR: 14122628
Analysis of the dependence of algorithms interrelated management processes
The article analyzes the interrelated dependencies control algorithms process the automation of large industrial or scientific complexes. Such systems typically are a set of geographically distributed processing subsystems and algorithmically that requires the development of a network system. An example of interrelated management process in problem geographically distributed automation technology platforms, are in an unstable environment. It is necessary to maintain a certain position of the platform by the spread of the laser beam across all platforms. The dependence of the control algorithms and on the basis of this analysis formed the requirements for telecommunications network system.
Текст научной статьи Анализ зависимостей алгоритмов управления взаимосвязанными технологическими процессами
Большое влияние на формирование требований к телекоммуникационным системам, обеспечивающих взаимодействие технологических подсистем распределенных промышленных комплексов, оказывает зависимость алгоритмов управления этих подсистем. Особые требования к системам связи предъявляются в случае, когда распределенная система управляет технологическими процессами отдельных подсистем в реальном времени и эти процессы являются взаимосвязанными с точки зрения решения главной задачи.
-
1. Взаимосвязанные технологические процессы
-
2. Пример ВТП и анализ зависимостей алгоритмов управления
Автоматизации технологических процессов больших промышленных или научных комплексов, когда существует большая территориальная и алгоритмическая распределенность, связана с разработкой сетевых систем для обеспечения взаимодействия отдельных технологических установок. Как правило, в качестве такой сетевой системы выступает телекоммуникационная система. В общем случае каждая установка реализует свою часть заданного алгоритма, функционируя в автономном режиме, после чего передает результаты другим установкам. В качестве результата выполнения могут выступать информационные данные, материалы, изделия и т.д. По таким технологиям работает большинство промышленных комплексов. Другой случай – когда результат работы распределенной автоматизированной системы создается большинством технологических подсистем совместно в реальном времени и при этом технологические процессы взаимосвязаны по алгоритмам.
Примером таких взаимосвязанных технологических процессов (ВТП) могут служить подсистемы прокатного стана непрерывной прокатки труб. Основная особенность технологического процесса непрерывной прокатки – это взаимосвязь отдельных клетей (систем прокатных валков) непрерывного стана через прокатываемую трубу с соблюдением равенства объема металла, проходящего через каждую клеть в единицу времени.
Другим примером ВТП могут служить технологические подсистемы циклического ускорителя заряженных частиц. Каждый ускоритель оснащен определенными средствами таймирования, которые необходимы для обеспечения режима реального времени систем управления и синхронизации технологических процессов на ускорителе. Технологические процессы отдельных подсистем являются взаимосвязанными с точки зрения решения главной задачи – получения устойчивого пучка заряженных частиц с заданными параметрами
В приведенных примерах к работе сетевых систем, обеспечивающих взаимодействие технологических подсистем управления, предъявляются специальные требования, определяемые зависимостями алгоритмов управления ВТП.
В качестве примера ВТП рассмотрим задачу выравнивания (в заданной плоскости) поверхности географически распределенных технологических платформ (ТП), находящихся в неустойчивой среде (например, на водной поверхности).
На рис.1 изображена упрощенная структура трех технологических платформ – ТП1, ТП2 и ТП3.
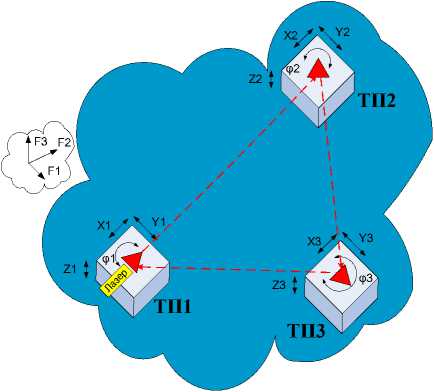
Рис. 1. Структура распределенных технологических платформ
Платформы могут находиться по отношению друг к другу на значительном расстоянии. Эту задачу можно решить методом распространения лазерного луча через все платформы. Необходимо управляя технологическими платформами замкнуть световую траекторию, т.е. построить плоскость через три точки. Согласно аксиоме стереометрии: через любые три точки, не лежащие на одной прямой, проходит плоскость, и притом только одна.
На каждой платформе размещены отражатели лазерного луча, а на ТП1 - генератор лазерного излучения. Каждая платформа может перемещаться по трем координатам X, Y, Z и поворачиваться относительно вертикальной оси на угол ф . Таким образом, текущая координата центра тяжести каждой платформы будет:
K1 ={X1,Y1,Z1, ф1} - координаты ТП1;
K2 ={X2,Y2,Z2, ф2} - координаты ТП2;
K3 ={X3,Y3,Z3, ф3} - координаты ТП3.
Перемещение по соответствующей координате выполняется с помощью привода, управляемого от локальной системы управления (ЛСУ), на основании анализа датчиков обратной связи и информации, поступающей от других платформ. На каждую платформу воздействуют внешние возмущения (течения, ветер и т.д.), обозначенные как интегрированные по каждой координате силы F1, F2 и F3.
Задача ЛСУ заключается в следующем:
-
- Обработка информационных сообщений от других ТП. На основании этих сообщений корректируется траектория движения платформы.
-
- Определение текущих координат платформы с помощью датчиков обратной связи и сравнение их с заданными.
-
- Формирование оптимальных управляющих воздействий для отработки заданных координат, согласно выбранного закона управления, и с учетом внешних возмущающих воздействий.
-
- Формирование сообщений для ЛСУ других ТП.
Локальная система управления реализует алгоритм управления платформой исходя из решения приведенных выше задач.
Поскольку технологические процессы (формирование траектории движения платформ) взаимосвязаны и распределены географически, то управление системой платформ должна обеспечивать распределенная система управления (РСУ). Составной частью РСУ является телекоммуникационная система. Взаимосвязанность отдельных технологических процессов, большие расстояния между подсистемами и малое время реакции ЛСУ накладывают определенные требования при построении телекоммуникационной системы:
-
- Передача данных от одной ЛСУ к другой (передача параметров выполнения технологических процессов).
-
- Детерминированность передачи данных от одной ЛСУ к другой.
-
- Минимальное время передачи данных.
-
- Обработка больших объемов данных и преобразование их в события.
-
- Кодирование данных в виде сообщений.
Приведенные требования существенно влияют на многие характеристики телекоммуникационной системы. Это топология телекоммуникационной сети, среда распространения сигналов, способ доступа и т.д. Кроме того, при проектировании телекоммуникационной системы большое влияние оказывают зависимости технологических процессов.
В работе [1] даны методика и определение зависимости управляющих алгоритмов через построение графов зависимостей. Граф зависимостей по данным определен как G D = {A,R D } , где А = {А 1 ,А 2 ,А з } - множество алгоритмов управления технологическими платформами (рис.1),
R d с A х A - множество связей по данным между алгоритмами. Граф зависимостей по управлению определен как G c = {A,R c } , где А = {А 1 ,А 2 ,А з } - множество алгоритмов управления технологическими платформами, R c с A х A - множество связей по управлению между алгоритмами.
Будем считать, что алгоритм A j (рис. 2, а) зависит по данным от A i , если алгоритм A i в результате своего выполнения модифицирует некую переменную, а алгоритм A j ее использует. Тем самым определена зависимость по данным. Аналогично алгоритм A j (рис. 2, б) зависит по управлению от A i , если выполнение алгоритма A j зависит от выполнения алгоритма A i . Поскольку алгоритм управления каждой платформы, в приведенном примере (рис. 1), независим от других, то есть только зависимость по данным.
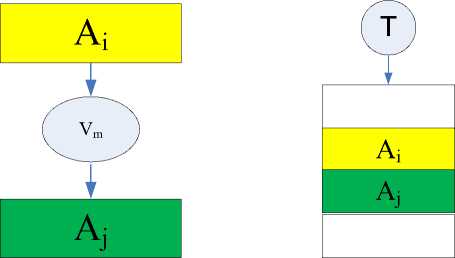
Рис. 2. Зависимость алгоритмов: а) по данным, б) по управлению
Входными параметрами управления ЛСУ (рис. 1) являются сигналы корректировки от распределенной системы управления. Задача распределенной системы управления состоит в согласовании локальных многоконтурных регуляторов для выполнения поставленной задачи – построении плоскости.
Заключение
Основные зависимости алгоритмов управления ВТП связаны с зависимостями по данным и по управлению. Зависимость по данным определяет выбор определенного алгоритма в исполняемом технологическом процессе. Зависимость по управлению определяется заданным порядком исполнения алгоритмов. Особое внимание при анализе зависимостей необходимо уделить взаимосвязанным временным рядам параметров технологических процессов. Анализ временных рядов таких параметров некоторых физических процессов (например, изменение температуры, скорость изменения ее и т.д.), в разных технологических процессах может показать взаимосвязанность ТП, что даст определенные качественные требования для распределенной системы управления, а, следовательно, и для сетевой системы. Одним из эффективных способов выявления зависимостей является построение графа зависимостей программного обеспечения систем управления.
Список литературы Анализ зависимостей алгоритмов управления взаимосвязанными технологическими процессами
- Дубинин В.Н., Вяткин В.В., Дроздов Д.Н. Опережающие вычисления в системах функциональных блоков IEC 61499 // Труды Международной научно-технической конференции «Современные информационные технологии», Пенза, 2013, вып. 17. - С. 9-24.
- Wall D.W. Limits of instruction-level parallelism // Proc. 4th Int. Conf. on Architectural Support for Programming Languages and Operating Systems (ASPLOS-91). - Pp. 176-188.
