Аппаратная организация цифрового устройства управления импульсным стабилизатором напряжения

Автор: Титовская Н.В., Титовский С.Н.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Технические науки: Процессы и машины агроинженерных систем
Статья в выпуске: 9, 2015 года.
Бесплатный доступ
В статье изложены результаты исследований применения ПЛИС FPGA в управлении импульсными стабилизаторами напряжения.
Плис, импульсный стабилизатор напряжения, управление
Короткий адрес: https://sciup.org/14084470
IDR: 14084470 | УДК: 681.323
The hardware organization of the digital control unit of the pulse voltage stabilizer
The research results on the application of EPLD (Electrically Programmable Logic Device) FPGA in the pulse voltage stabilizer control are presented in the article.
Текст научной статьи Аппаратная организация цифрового устройства управления импульсным стабилизатором напряжения
Введение. В настоящее время применению цифрового контура управления в импульсных стабилизаторах напряжения (ИСН) уделяется пристальное внимание, так как он исключает температурный и временной дрейф параметров схемы, свойственный аналоговым устройствам.
Цель исследования : оценка применимости ПЛИС FPGA в управлении ИСН.
Задача исследования : определение возможных скоростных характеристик ИСН с аппаратно-реализованным цифровым устройством управления.
Методы исследования: экспериментальное исследование макетного образца.
Как было показано в [1, 2], задачей УУ ИСН является формирование выходного импульса управления ключом стабилизатора, длительность которого является функцией от входных напряжений:
Тимп = F(Uинт, Uдиф, Uрас).
В результате моделирования работы стабилизатора было выявлено, что для инвертирующего интегратора наилучшие результаты получаются при использовании следующей функции [3, 4]:
Тимпi = Тп ∙ (Uинтi– (7.5 ∙ Uдифi– 2.25 ∙ Uдифi-1)) / Umax, где i – номер такта работы стабилизатора;
Тп – длительность такта (период) работы стабилизатора;
Uинт – напряжение с выхода интегратора;
Uдиф – переменная (дифференциальная) составляющая выходного напряжения;
Umax – условное максимальное напряжение (напряжение, при котором длительность выходного импульса совпадает с периодом).
Использование цифрового устройства для расчета требует предварительного аналогоцифрового преобразования, поэтому обобщенная функциональная схема устройства управления выглядит, как показано на рисунке 1.
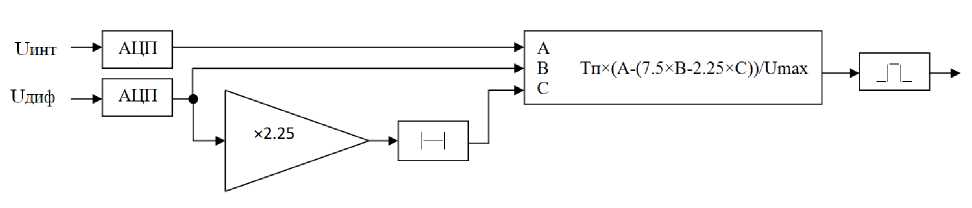
Рис. 1. Обобщенная функциональная схема устройства управления
Для уменьшения погрешности, накапливаемой в процессе вычислений, входной сигнал Uдиф был приведен к диапазону ±320 мВ (для статического режима работы) за счет предварительного усиления в 16 раз.
Для реализации устройства управления в интегральном виде использована ПЛИС FPGA Cyclone II EP2C20 фирмы Altera [5] в сочетании с аналого-цифровым преобразователем (АЦП) MAX1308 фирмы Maxim [6].
Поскольку данный этап работы являлся экспериментальным, для обеспечения возможности оперативного изменения алгоритма функционирования устройства управления стабилизатором напряжения было решено отказаться от его полностью аппаратной реализации и использовать процессорное ядро, позволяющее организовать программное управление. В этом случае изменение алгоритма расчетов реализуется за счет внесения изменений в программу, исполняемую процессором.
В качестве такого процессорного ядра выбранLeon3 фирмы AeroflexGaisler, основанный на архитектуре SPARCV8. Шаблон Leon3 свободно доступен в составе библиотеки IP-cores (ядер) GRLIB [7].
Для организации устройства управления в рамках ПЛИС FPGACycloneIIEP2C20 была использована конфигурация аппаратуры, включающая процессор, контроллер памяти, системную магистраль, два порта ввода/вывода из библиотеки GRLIB-CPL-1.1.0-b4108 и специализированный дополнительно разработанный таймер-счетчик (ТС) (рис. 2).
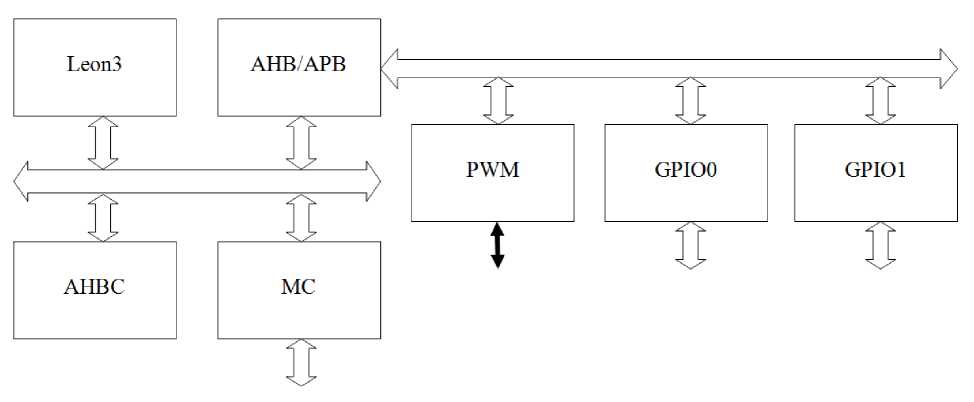
Рис. 2. Конфигурация аппаратуры в ПЛИС FPGACycloneIIEP2C20
На приведенном рисунке 2: Leon3 – процессорное ядро; AHBC – контроллер интерфейса
AMBA 2.0 AHB; MC – Leon2 контроллер памяти; AHB/APB – мост между интерфейсами AHB и APB
(AMBA 2.0); PWM – специализированный таймер-счетчик; GPIO0, GPIO1 – универсальные порты ввода/вывода.
Необходимость дополнительного таймера обусловлена большим временем передачи данных между процессором и портами ввода/вывода. Поэтому программное обнаружение и формирование сигналов сопровождается значительными задержками и нестабильностью во времени, измеряемыми сотнями наносекунд, что, в свою очередь, приводит к нестабильности работы стабилизатора напряжения в целом.
Разработанный ТС имеет в своем составе канал захвата частоты, использующийся для измерения длительности периода запуска стабилизатора, и два канала сравнения, работающие в режиме широтно-импульсной модуляции, формирующие импульсы запуска АЦП и открывания силового ключа стабилизатора напряжения. Блок-схема разработанного таймера приведена на рисунке 3.
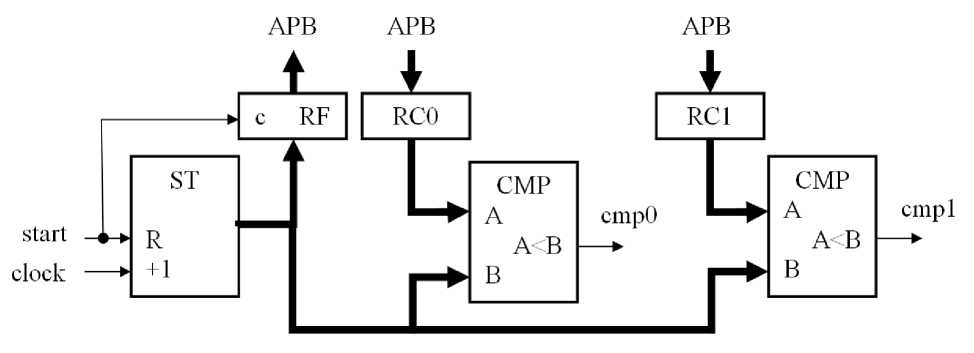
Рис. 3. Структура ТС
На приведенном рисунке 3: start – сигнал запуска стабилизатора напряжения; clock – тактовая частота (50 МГц); APB – AMBA 2.0 APB интерфейс; ST – двоичный счетчик (32 разр.); RF – регистр канала захвата частоты (32 разр.); RC0, RC1 – регистры каналов сравнения 0 и 1 (32 разр.); CMP – цифровые компараторы (32 разр.).
Логика работы ТС заключается в следующем: сигнал запуска стабилизатора своим нарастающим фронтом переписывает текущее содержимое счетчика ST в регистр RF и одновременно обнуляет счетчик. Цифровые компараторы CMP вырабатывают сигнал, соответствующий результату сравнения текущего содержимого счетчика с кодом, хранящимся в регистре RC0/RC1 соответственно. Выходной сигнал компаратора CMP0/CMP1 принимает единичное значение в случае, когда код, накопленный в счетчике, превышает содержимое соответствующего регистра RC0/RC1.
Реализация устройства управления стабилизатором заключается в соединении операционного усилителя, АЦП и ПЛИС FPGACycloneIIEP2C20, при этом порт GPIO1 ПЛИС использован для передачи управляющих сигналов, порт GPIO0 – для передачи данных между АЦП и процессором. Для исключения необходимости расширять знак кода, полученного с АЦП, его старший (знаковый) разряд подключен к пяти разрядам порта GPIO0.
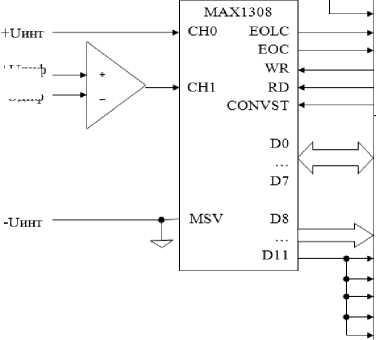
Подключение дифференциальных сигналов к АЦП MAX1308 не предусмотрено, поэтому положительный сигнал Uинт соединен с информационным входом АЦП, а отрицательный – непосредственно с контактом MSV (Midscalevoltage), относительно которого фактически производятся измерения. Сигнал Uдиф в дифференциальном виде подключен к входам операционного усилителя, расположенного в непосредственной близости к АЦП, с выхода которого поступает на информационный вход АЦП.
Оцифрованные данные с АЦП считывались после окончания всех преобразований, так как результаты преобразований с отдельных каналов появляются с интервалом в 200 нс, в то время, как время программного обнаружения сигнала составляет приблизительно 400÷500 нс.
Блок-схема такого устройства управления представлена на рисунке 4.
Управление ключом
Cyclone П EP2C20
Импульсы запуска
gpioOp]
gpioO[S]
gpioOp 1] gpio0[12] gpio0[13] gpio0[14] gpioOriS]
GPIO1
— EP'oiP] gpiol[0] gpiolp] gpiolp] gpiolP] gpiolp] gpb°l[l]
GPIO0 gpioO[0]
+идиф
-Идиф
Контроллер памяти fl_addr[0]
fl_addr[21]
fl_dq[O]
W]
Flash -

память addr[O]
addr[21]
dqp]
dqp]
floen flrstn fl we n
oe_n rst n
Рис. 4. Блок-схема устройства управления
Для тактирования ПЛИС FPGA Cyclone II EP2C20 использован кварцевый генератор прямоугольных импульсов частотой 50 МГц, для АЦП MAX1308 – внутренний тактовый генератор с частотой 15 МГц.
Требуемая организация функционирования УУ ИСН реализуется с помощью программы, в которой используется программно-аппаратная организация УУ, приведенная на рисунке 5.
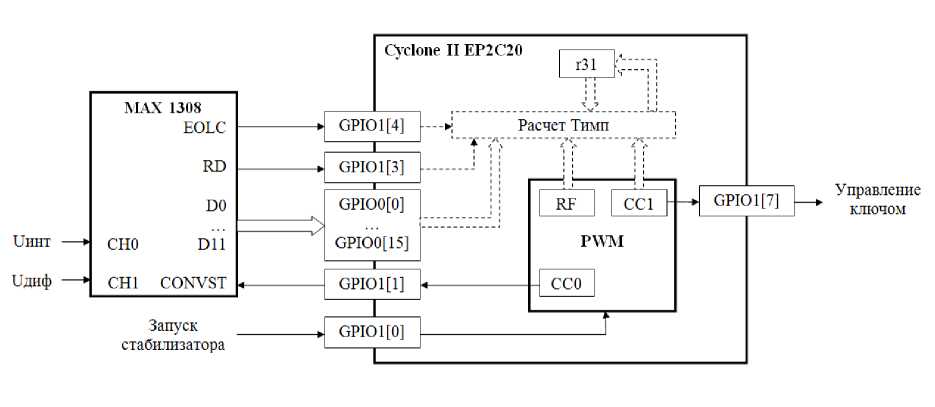
Рис. 5. Программно-аппаратная организация УУ
Импульс запуска с контакта GPIO1[0] своим передним фронтом перезапускает ТС PWM и одновременно в регистре RF фиксирует содержимое счетчика – время, прошедшее с момента предыдущего запуска, т. е. длительность предыдущего периода запуска Тп.
Для запуска аналого-цифрового преобразователя используется нулевой канал сравнения ТС CC0, что позволяет задержать момент запуска АЦП по отношению к моменту коммутации ключа силовой части стабилизатора, сопровождающемуся значительными импульсными помехами.
По истечении времени (количества тактов), определяемого содержимым регистра CC0, сигнал с выхода нулевого канала сравнения через контакт GPIO1[1] поступает на вход CONVST (ConversionStart) и своим нарастающим фронтом запускает АЦП.
После завершения преобразования данных всех каналов АЦП вырабатывает сигнал EOLC (EndOfLastConversion), поступающий на вход GPIO1 [4]. Падающий фронт сигнала EOLC обнаруживается программой и, как следствие, инициирует процедуру расчета Тимп. Процедура расчета, подавая на АЦП через вывод GPIO1 [3] сигналы чтения (RD), через порт GPIO0 считывает двухбайтовые коды входных напряжений Uинт, Uдиф. Далее выполняется расчет Тимп на основании полученных значений Тп, Uинт, Uдиф и в регистр RC1 первого канала сравнения ТС CC1 помещается код, обеспечивающий формирование выходного импульса требуемой длительности на выходе GPIO1 [7].
Поскольку используется 12-разрядный АЦП, Umax принято равным 2047.
В рассматриваемом варианте стабилизатора используется модуляция переднего фронта импульса управления ключом, поэтому в регистр RC1 первого канала сравнения ТС PWM в качестве длительности импульса помещается разность Тп – Тимп.
В этой же процедуре вычисляется и помещается в регистр процессора R31 значение Uпред = 2,25 ∙ Uдиф, которое будет использоваться в расчетах следующего периода запуска.
Контрольные моменты времени для частоты 120 КГц иллюстрируются осциллограммами на рисунке 6.
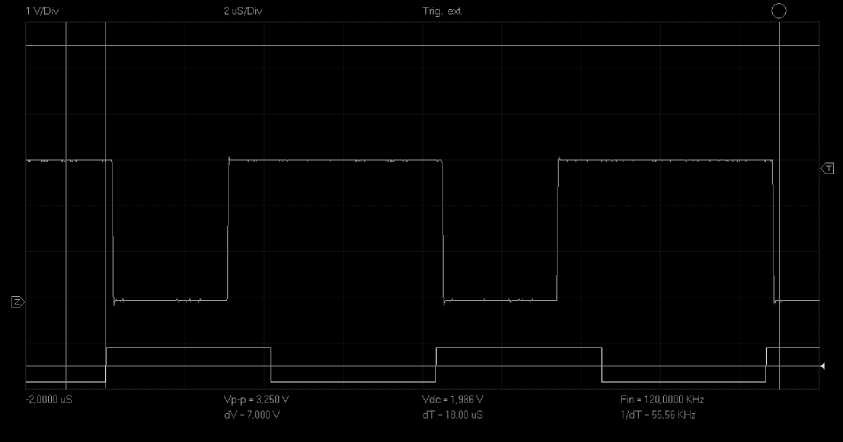
а
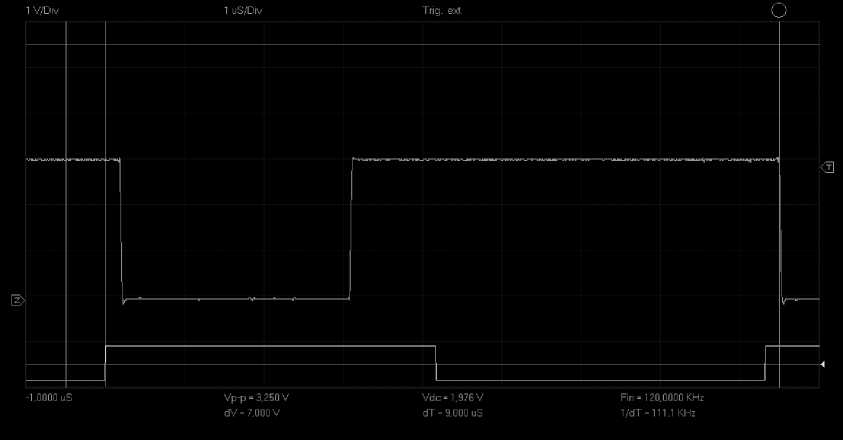
б
Рис. 6. Осциллограммы работы УУ ИСН
На осциллограммах рисунка 6 (а, б) в разных масштабах показаны импульсы запуска стабилизатора (желтый луч в нижней части) и выходные импульсы управления ключом стабилизатора (зеленый луч в средней части) в случае, когда Uинт = Umax, Uдиф = 0. Из них видно, что максимально возможная длительность выходных импульсов составляет приблизительно 5,4 мкс.
Таким образом, на частоте 120 КГц максимальная длительность выходного импульса не превышает 65 % от периода и с увеличением частоты работы стабилизатора будет уменьшаться, что, в свою очередь, уменьшает диапазон изменения выходного тока, при котором наблюдается неизменное выходное напряжение.
Выводы. Проведенное исследование показало, что применение аппаратно-реализованного на FPGA быстродействующего процессорного ядра в сочетании с внешним быстродействующим высокоточным АЦП позволяет достичь частоты работы ИСН порядка 120 КГц при высоком качестве стабилизации выходного напряжения. При реализации УУ ИСН в виде цифрового автомата с жесткой логикой по предварительным оценкам частота работы ИСН может достигать (0,6 ÷ 1) МГц и более.
Список литературы Аппаратная организация цифрового устройства управления импульсным стабилизатором напряжения
- Титовская Н.В., Титовский С.Н. Применение микроконтроллера ATxmega в устройстве управления импульсным стабилизатором напряжения//Вестн. КрасГАУ. -2015. -№ 7. -С. 58-63.
- Титовская Н.В., Титовский С.Н. Организация устройства управления импульсным стабилизатором напряжения на базе микроконтроллера//Вестн. КрасГАУ. -2015. -№ 8. -С. 87-92.
- Лукас В.А. Теория автоматического управления: учеб. для вузов. -М.: Недра, 1990.
- Иванчура, В.И., Краснобаев Ю.В. Модульные быстродействующие стабилизаторы напряжения с ШИМ. -Красноярск: Изд-во КГТУ, 2006.
- URL: http://www.altera.com/literature/hb/cyc2/cyc2_cii5v1.pdf.
- URL: http://datasheets.maxim-ic.com/en/ds/MAX1304-MAX1314.pdf.
- URL: http://www.gaisler.com/products/grlib/grlib-gpl-1.1.0-b4108.zip.
