Аппаратно-программный комплекс управления противокоррозионной защитой магистрального трубопровода

Автор: Кривцов Алексей Олегович, Карнаухов Николай Федорович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 6 (49) т.10, 2010 года.
Бесплатный доступ
Предложена структурная схема построения аппаратно-программного комплекса (АПК) управления устройством электрохимической защиты (УЭХЗ) транспортного трубопровода от коррозии. Показаны особенности функционирования АПК в режиме диагностики состояния трубопровода по разработанным алгоритмам с использованием методов нечеткой логики.
Аппаратно-программный комплекс, алгоритм, потенциал защиты, диагностика, нечеткая логика
Короткий адрес: https://sciup.org/14249432
IDR: 14249432 | УДК: 622.692.4.076:
Hardware-software complex of transmission pipeline anticorrosion protection
A structural construction scheme for the hardware-software control complex of transmission pipeline electrochemical anticorrosion protection equipment is offered. Performance features of the complex under test operation according to the developed algorithms with the use of fuzzy logic methods.
Текст научной статьи Аппаратно-программный комплекс управления противокоррозионной защитой магистрального трубопровода
Введение. Металлические транспортные трубопроводы (нефтегазовые, тепловые или водопроводные) из малоуглеродистой низколегированной стали, контактирующие или находящиеся в коррозийно-активных средах, обычно обеспечиваются пассивными и активными противокоррозионными защитами. Периодические обследования состояния противокоррозионной защиты, предусмотренные ГОСТ Р 51164-98, ГОСТ 9.602-89 и другими нормативными и рекомендательными документами, позволяют своевременно выявить места с дефектами на трубопроводе и предопределить аварийную ситуацию. Для этого применяют системы коррозийного мониторинга (СКМ) в виде программного продукта («Экстра», версия 4.4) нефтепромыслового оборудования и трубопроводов, характеризуемые совокупностью технических, методических, программных средств и организационных мероприятий [1]. Однако представленные методы позволяют в совокупности только выявить «фактические» изменения в материале трубопровода при коррозии, но не раскрывают динамику коррозийных процессов, которые могут проявиться при эксплуатации. К тому же, в научных работах пока нет информации о возможностях использования данных СКМ для диагностики и управления режимами работы устройств электрохимической защиты (УЭХЗ) транспортного трубопровода на основе анализа программного продукта. Сложность управления защитными процессами трубопровода очевидна и обусловлена рядом факторов: взаимным влиянием других подземных металлических сооружений (ПМС) на уровень защитного потенциала трубопровода, изменениями длины «плеча» защиты из-за снижения качества изоляционного покрытия трубопровода по истечении времени и характеристик проводимости грунта [2].
Постановка задачи . Эффективность указанных мероприятий, по нашему мнению, можно повысить, если автоматизировать режимы диагностики и управления УЭХЗ по поддержанию расчетного защитного потенциала на трубопроводе с учетом изменяющихся параметров грунта, факторов взаимного влияния ПМС и окружающей среды. Такое решение возможно c обеспечением необходимой «управляемости» режимами работы одного устройства противокоррозионной защиты (УЭХЗ) и некоторого числа N устройств защиты, обеспечивающих расчетный потенциал защиты φ защ по всей длине трубопровода в изменяющихся условиях. В этом случае система управления технологическим комплексом (ТК) противокоррозионной защиты значительно усложняется и увеличивается объем информации, обусловливающий необходимость построения автоматизированной системы реального времени. При этом функции диспетчера по анализу данных, прогнозированию ситуаций и принятию соответствующих решений (по управлению числом N устройств защиты) должны передаваться на компоненты интеллектуальных систем (ИС) поддержки принятия и исполнения решений (СППИР).
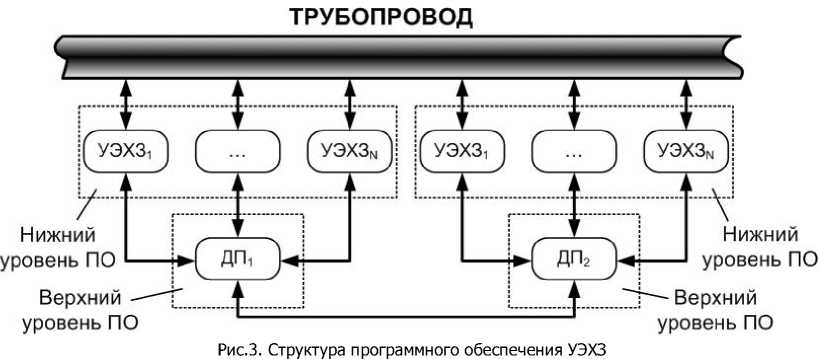
Структура построения УЭХЗ . Структуру построения УЭХЗ (рис.1) можно представить, когда каждое УЭХЗ имеет датчики, систему автоматического управления (САУ) силовым преобразователем электроэнергии, избирательный канал связи для передачи и приема информации диспетчерским пунктом (ДП) [3-5]. Принадлежность по управлению УЭХЗ к конкретному ДП определяется 881
условиями прохождения радиосигнала и стабильностью связи между УЭХЗ и ДП, дополнительно поддерживаемой спутниковым каналом связи.
ТРУБОПРОВОД
Рис.1. Структурная схема автоматизированного управления противокоррозионной защитой трубопровода
Трубопровод в точке дренажа (рис.1) присоединяется к минусовому потенциалу УЭХЗ, а плюсовое напряжение подается на анод заземления (АЗ). УЭХЗ подключается к трехфазной (однофазной) сети ~380/220 В, 50 Гц и содержит источник регулируемого напряжения (ИРН) с высокочастотным преобразователем (ВЧП). Источник и преобразователь управляются от процессорного модуля (ПРЦ) через генератор задающего напряжения (ГЗН). ВЧП в схеме выполняет также функции развязки трубопровода от силовой части преобразователя и цепи питания УЭХЗ. Связь датчиков контролируемых параметров, электрода сравнения (ЭС) с другими электронными узлами СУ, процессорного модуля (ПРЦ) осуществляется через интерфейс RS-232, например, с модулем обработки сообщений (МОС), радиостанцией (РС), работающей в дуплексном режиме с базовой приемно-передающей станцией [6].
Модуль сопряжения (МС) выполняет функцию согласования аналоговых сигналов, поступающих от датчиков и контролирующей аппаратуры с входными напряжениями модуля АЦП, и мультиплексирование этих сигналов.
Процессорный модуль, являясь интеллектуальным ядром, обеспечивает управление остальными модулями и осуществляет предварительную обработку информации, собираемой с датчиков и контролирующей аппаратуры. С помощью ПРЦ в схеме программным путем выполняются задачи самоконтроля и диагностики состояния трубопровода.
Модуль аналого-цифрового преобразования (АЦП) служит для преобразования аналоговых сигналов в цифровую форму и передачи этой информации в процессорный модуль по шине ISA.
Модуль цифрового ввода (МЦВ) и модуль дополнительных портов (МДП) расширяют возможности схемы управления по согласованию и присоединению дополнительных устройств контроля, датчиков информации с ПРЦ.
Генератор задающего напряжения предназначен для управления выходной мощностью полупроводникового преобразователя УЭХЗ. Сигналы датчиков поступают в модуль сопряжения, где проходят согласование по уровню входного напряжения АЦП и преобразуются в цифровую форму, через шину ISA поступают в ПРЦ. Каждое УЭХЗ, оснащенное МОС и радиостанцией, может выступать как приемник или передатчик. В случае невозможности прохождения радиосигнала, радиосвязь можно заменить спутниковой связью, например, спутниковым GPRS-модемом Siemens 882
MC35 с прямым подключением модема к процессорному модулю (ПРЦ). Процессорный модуль по специальному алгоритму обрабатывает полученную информацию и на основании анализа принимает решение об изменении режима работы УЭХЗ. При этом для управления и поддержания защитного потенциала на расчетном уровне предлагается возможная структура построения интеллектуальной СУ (ИСУ) и диагностики УЭХЗ с использованием методов нечеткой логики, реализуемых на базе аппаратно-программного комплекса (АПК).
Аппаратно-программный комплекс (АПК). Ядром информационной подсистемы (ИПС) ИСУ АПК является набор функциональных блоков, работающих со знаниями, хранящимися в базе знаний [4, 7, 8], причем в рассматриваемой ИПС базу знаний составляют различные типы знаний как статистического, так и динамического характера. К первому типу относятся знания, имеющие описательный характер, на базе которых основываются все дальнейшие рассуждения. В этой связи электрохимический комплекс противокоррозионной защиты трубопровода следует отнести к виду производственных систем, в которых параметры и показания технологических датчиков являются постоянно изменяемыми факторами. Поэтому СУ ТК, содержащую до нескольких сот датчиков, приборов с контролем параметров текущего характера и аварийных сигналов, меняющих величину или состояние защитного потенциала в течение нескольких минут (часов), можно рассматривать как сложную динамическую многопараметрическую систему (рис.2).
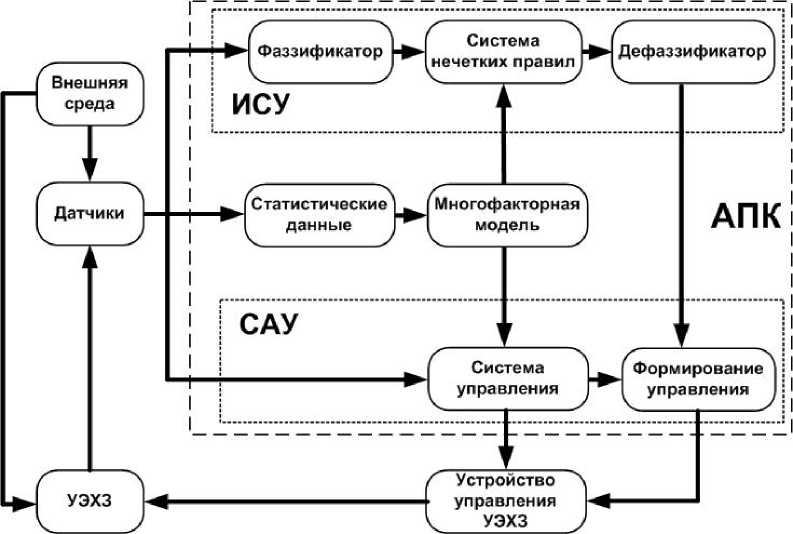
Рис.2. Обобщенная схема управления противокоррозионной защитой c использованием аппаратно-программного комплекса
В этом режиме в задачу системы вменяется установка экспертного диагноза состояния электрохимической защиты всего комплекса и разработка рекомендаций по обеспечению целесообразных режимов работы всех УЭХЗ. Такое положение обычно характеризует второй тип знаний – это логические правила (правила продукций), обеспечивающие принятие решений на основе анализа посылок. При этом экспертная система формируется на принципе механизма нечётких выводов и имеет в своей основе базу знаний.
База знаний создается специалистами проектных организаций по данным коррозийной активности грунтов и наличия блуждающих токов с учетом совмещенного плана (проектируемых и существующих подземных сооружений, а также рельсовых сетей электрифицированного транспорта), выполненного в масштабе 1: 2000 или 1: 5000.
Для разработанного АПК в соответствии с физическими основами работы электрохимической защиты входными переменными могут быть: ρ – сопротивление участка трубопровода единичной длины (удельное сопротивление); R – сопротивление изоляционного покрытия на этом участке; a – радиус трубопровода; k – удельная проводимость грунта; b – расстояние анода от оси трубопровода; z – координата, отсчитываемая вдоль трубопровода; N – число УЭХЗ на проектируемом участке трубопровода, а переменными вывода : U a , U b , U f , U g и т.д. - потенциалы в контрольных точках трубопровода.
Приведенные выше параметры в указанной предметной области находятся в некоторой зависимости, и на основе совокупности парных оценок можно построить матрицы предпочтений с дополнительными калибровочными ограничениями [8] в виде простой калибровки (совокупности нечётких предикатных правил). Используя текущие или промежуточные исходные данные и знания (из базы знаний), можно формировать некоторые правила по обработке исходных данных (полученных от СУ ТК), позволяющие выполнить конкретную задачу диагностики состояния трубопровода и осуществить регулирование важнейших параметров технологического процесса противокоррозионной защиты с необходимой точностью. Структурное представление движения потока информации при реализации уровня нечетких логических выводов в ИС управления комплексом электрохимической защиты (из-за ограниченности объема статьи) не приводится.
Важнейшей частью АПК является программное обеспечение (ПО), представленное условно в виде двух частей: ПО нижнего и ПО верхнего уровней (рис. 3), установленные соответственно в одноплатный компьютер (на стороне защищаемого объекта) и в персональный компьютер (в месте расположения диспетчерского пункта). ПО нижнего уровня матрицы предпочтений выполняет определенные функции, такие, как:
-
– диагностика подключенных к одноплатному компьютеру модулей (датчики, радиостанция и т.д.);
-
– считывание данных с измерительной аппаратуры в определенные интервалы времени;
-
– анализ принятых данных на основе информации, содержащейся в базе знаний;
-
– изменение режима работы УЭХЗ и автокоррекция защитного потенциала защищаемого объекта;
-
– подготовка информации для передачи ее по каналу связи в диспетчерский пункт в определенные интервалы времени;
-
– прием информации от диспетчера по каналу связи и ее обработка;
-
– ведение ежедневного архива данных.
Построение ПО должно выполняться по блочно-модульному принципу с максимальной независимостью модулей и обеспечением их универсальности по отношению к устройствам сопряжения.
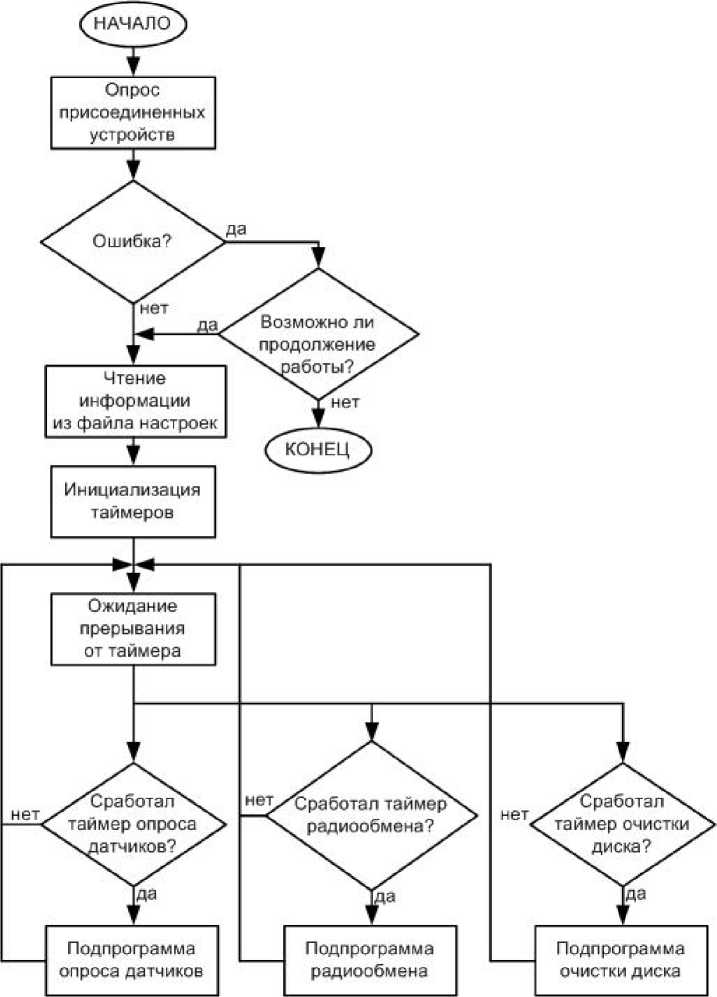
Функционирование такой программы можно представить в виде алгоритма (рис.4), определяющего последовательность опроса периферийных устройств, подключенных к одноплатному компьютеру посредством шины ISA, и портов RS-232. В качестве процессорного модуля можно 884
использовать, например, модуль PCA-6145 фирмы Advantech на базе микропроцессора типа 80486DX4 с тактовой частотой 100 МГц и оперативной памятью от 1 до 32 Мбайт [6, 7].
НАЧАЛО
Ошибка?
КОНЕЦ
Возможно ли продолжение \работы?/
^/Сработал^х
■^^таймер опроса
\_датчиков? /
./Сработал^х нет^таймер очистки диска? / нет не]/С работа л таймер радиообмена?
Чтение информации из файла настроек
Подпрограмма опроса датчиков
Подпрограмма радиообмена
Подпрограмма очистки диска
Опрос присоединенных устройств
Инициализация таймеров
Ожидание прерывания от таймера
Рис.4. Алгоритм работы программы нижнего уровня
К периферийным устройствам относятся различные датчики, АЦП и МДП, а также модуль отправки сообщений. При наличии ошибки программа определяет, какое устройство допускает «сбой», что сообщается диспетчеру по радиоканалу. Диспетчер принимает решение о возможности продолжения работы УЭХЗ или введения коррекции в режим работы N -го противокоррозионного устройства по трассе трубопровода. Причем выполняется программа в режиме реального времени (РВ) с принятым рангом приоритетности, что определяет главную совокупность функций выбранной операционной системы (ОС). При числе N УЭХЗ такая ОС РВ решает более разветвленные задачи, как в распределенных системах. После проверок программа считывает из 885
конфигурационного файла параметры своего функционирования. Диспетчер имеет возможность дистанционно изменять эти параметры, считывание которых происходит каждый раз после получения новых значений. Затем выполняется инициализация таймеров, т.е. определение периодичности наступления каких-либо событий в работе ТК. Например, опрос датчиков происходит каждые три минуты, сеанс радиосвязи наступает каждые пятнадцать минут, а очистка диска и архивирование данных – каждый день, например, в полночь. Диспетчер имеет возможность дистанционно менять эти интервалы через конфигурационный файл. Затем программа входит в режим ожидания сигнала от таймера о наступлении какого-либо события из трех: снятие информации с датчиков и измерительной аппаратуры, радиообмен УЭХЗ и диспетчерского пункта, архивирование данных, полученных в течение суток. После чего программа сравнивает текущие значения параметров с заданными в конфигурационном файле. Если наблюдаются расхождения текущих параметров за пределами допустимых значений, происходит автоматическая коррекция режима работы одного устройства УЭХЗ, а в режиме диспетчерского управления – числом N УЭХЗ по трассе трубопровода.
ПО верхнего уровня устанавливается на персональные компьютеры в местах расположения ДП и позволяет осуществлять:
-
– мониторинг состояния защищаемого объекта и УЭХЗ;
-
– дистанционное управление уровнем защитного потенциала;
-
– сбор статистических данных для анализа параметров защищаемого объекта с течением времени;
-
– построение графиков зависимости параметров защищаемого объекта и окружающей его среды во времени;
-
– построение картины распределения защитного потенциала по длине транспортного трубопровода.
При выполнении программы с определенным интервалом производится последовательный опрос станций, осуществляемый в два этапа: прием информации и отправка управляющих параметров. Если прием прошел успешно, происходит разбор принятых данных и сохранение их на диск. В соответствии с новыми данными обновляется информация на мониторе ПК ДП и видоизменяются графики зависимости принятых данных от времени. Затем в цикле опрашиваются остальные УЭХЗ, закрепленные за диспетчерским пунктом. Если программа установит, что произошел отказ в работе УЭХЗ или обнаружена тенденция к изменению защитного потенциала, то диспетчер будет оповещен. Это необходимо для того, чтобы равномернее распределить защитный потенциал по трубопроводу и избежать «перетекания» тока трубопровода из зоны защиты одного УЭХЗ в зону защиты другого.
Таким образом, имея данные с защищаемых участков одновременно, с помощью базы знаний и алгоритмов на основе нечеткой логики [4, 8] можно в диспетчерском режиме по целесообразному алгоритму управлять защитным потенциалом трубопровода, исключающим возможность «перетекания» токов между УЭХЗ и позволяющим получить желаемый график распределения потенциалов для каждого из числа N УЭХЗ в отдельности и по трассе трубопровода в целом (рис.5).
При этом в поле 3 выводятся текущие значения следующих параметров: защитный потенциал, сопротивление трубы, сопротивление изоляции трубы и удельная проводимость грунта. Под цифрой 4 показаны поля для ввода управляющей информации, с помощью которой можно изменить режим работы станции. Для этого необходимо ввести нужные значения в соответствующие поля, выбрать нужную станцию (поле 2) и нажать кнопку «отправить». Параметрами (защитный потенциал, время опроса датчиков и период передачи данных) можно управлять. Время опроса датчиков – это паузы между предыдущим опросом и последующим, а период передачи данных определяется количеством циклов опроса датчиков. В поле под номером 5 показаны графики изменения потенциала защиты в контролируемой точке трубопровода во времени.
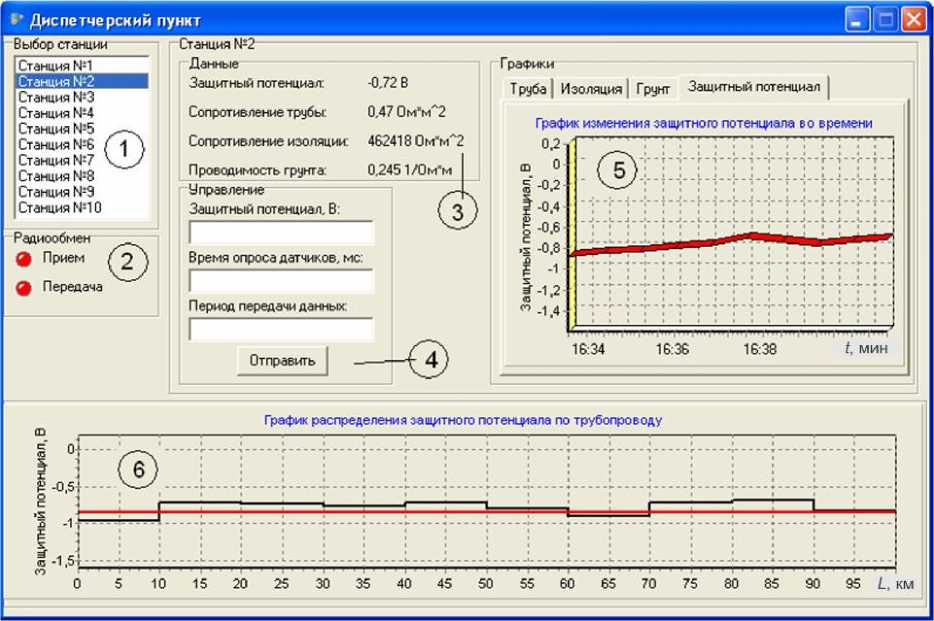
Рис.5. Примерный вид функционирования программы верхнего уровня
В поле 6 выводится график распределения защитного потенциала по всей длине трубопровода при работе числа N УЭХЗ. Функционирование программы верхнего уровня предусматривает возможность реагирования на сообщения, пересылаемые между ПРЦ в обоих направлениях. Такие сообщения несут информацию, подлежащую обработке, сведения о состоянии системы и синхронизируют работу СУ на глобальном уровне. Приведенную программу функционирования верхнего уровня ПО АПК можно совершенствовать с приданием новых функций, необходимых для улучшения качества управления технологическим комплексом противокоррозионной защиты трубопровода, что важно для упрощения работы диспетчера при оценке большого объема информации и автоматизации процесса принятия решений.
Выводы. Реализация структуры управления УЭХЗ в специфических условиях эксплуатации ТК противокоррозионной защиты трубопровода возможна в ряде случаев:
-
– когда технические и программные средства разработаны на базе комплексного решения задач управления числом N УЭХЗ, а созданная специальная аппаратура внутрисистемного сопряжения УЭХЗ, датчиков и используемых РIC-контроллеров позволяет разделить задачи, решаемые центральными и местными устройствами управления, и соответствует требованиям функциональной, электромагнитной и электрической совместимости;
-
– если разработаны соответствующие системное программное обеспечение (базовое верхнего уровня ПО в ) и групповое (технологическое нижнего уровня ПО н ), позволяющие в совокупности решать задачи диспетчерского управления УЭХЗ на глобальном уровне;
-
– при построении структуры противокоррозионной защиты, если заложены методы нечеткого управления, позволяющие на диспетчерском уровне обеспечить режимы работы числа N УЭХЗ с учетом широкого изменения параметров трубопровода, изоляционного покрытия, грунта и элементов цепи защитного тока натекания.
Список литературы Аппаратно-программный комплекс управления противокоррозионной защитой магистрального трубопровода
- Гумеров А.Г. Методы, средства и программное обеспечение для систем коррозийного мониторинга трубопроводов./А.Г. Гумеров, А.П. Медведев, А.Т. Фаритов [и др].//Транспорт и подготовка нефти. -2002. -№10.
- Ткаченко В.Н. Электрохимическая защита трубопроводов: учеб. пособие/В.Н. Ткаченко. -Волгоград: НП ИПД «Авторское перо», 2005. -234 с.
- Карнаухов Н.Ф. Пат. №2278458. Устройство для запуска сетевого преобразователя напряжения./Н.Ф. Карнаухов, Н.Д. Зиновьев, М.Э. Шошиашвили [и др.]; заявл. №2005101440/09 (001762) от 21.01.2005; опубл. 20.06. 2006, Бюл. №17.
- Карнаухов Н.Ф. Электрохимическая защита магистральных газопроводов с «элементами» искусственного интеллекта/Н.Ф. Карнаухов, А.О. Кривцов//Интеллектуальные системы: тр. седьмого междунар. симпозиума; под ред. К.А. Пупкова -М.: РУСАКИ, 2006. -656 c.
- Карнаухов Н.Ф. О перспективных направлениях в разработке современных устройств электрохимической защиты/Н.Ф. Карнаухов, А.Ю. Ястребов, М.Э. Шошиашвили [и др.]//Управление. Конкурентоспособность. Автоматизация; под. общ. ред. И.В. Богуславского. -Ростов н/Д: ИУИ АП, 2004. -№3.
- Кузнецов А.П. Промышленные компьютеры фирмы Advantech/А.П. Кузнецов//Современные технологии автоматизации. -1997. -№1. -С.12-20.
- Жиленков Н.С. Новые технологии беспроводной передачи данных/Н.С. Жиленков//Современные технологии автоматизации. -2003. -№4. -С.44-47.
- Алиев Р.А. Управление производством при нечёткой исходной информации/Р.А. Алиев. -М.: Энергоатомиздат, 1991. -240 с.
- Gumerov A.G. Metody, sredstva i programmnoe obespechenie dlya sistem korroziinogo monitoringa truboprovodov./A.G. Gumerov, A.P. Medvedev, A.T. Faritov [i dr].//Transport i podgotovka nefti. -2002. -№10. -in Russian.
- Tkachenko V.N. Elektrohimicheskaya zaschita truboprovodov: ucheb. posobie/V.N. Tkachenko. -Volgograd: NP IPD «Avtorskoe pero», 2005. -234 s. -in Russian.
- Karnauhov N.F. Pat. №2278458. Ustroistvo dlya zapuska setevogo preobrazovatelya napryajeniya./N.F. Karnauhov, N.D. Zinov'ev, M.E. Shoshiashvili [i dr.]; zayavl. №2005101440/09 (001762) ot 21.01.2005; opubl. 20.06. 2006, Byul. №17. -in Russian.
- Karnauhov N.F. Elektrohimicheskaya zaschita magistral'nyh gazoprovodov s «elementami» iskusstvennogo intellekta/N.F. Karnauhov, A.O. Krivcov//Intellektual'nye sistemy: tr. sed'mogo mejdunar. simpoziuma; pod red. K.A. Pupkova -M.: RUSAKI, 2006. -656 c. -in Russian.
- Karnauhov N.F. O perspektivnyh napravleniyah v razrabotke sovremennyh ustroistv elektrohimicheskoi zaschity/N.F. Karnauhov, A.Yu. Yastrebov, M.E. Shoshiashvili [i dr.]//Upravlenie. Konkurentosposobnost'. Avtomatizaciya; pod. obsch. red. I.V. Boguslavskogo. -Rostov n/D: IUI AP, 2004. -№3. -in Russian.
- Kuznecov A.P. Promyshlennye komp'yutery firmy Advantech/A.P. Kuznecov//Sovremennye tehnologii avtomatizacii. -1997. -№1. -S.12-20. -in Russian.
- Jilenkov N.S. Novye tehnologii besprovodnoi peredachi dannyh/N.S. Jilenkov//Sovremennye tehnologii avtomatizacii. -2003. -№4. -S.44-47. -in Russian.
- Aliev R.A. Upravlenie proizvodstvom pri nechetkoi ishodnoi informacii/R.A. Aliev. -M.: Energoatomizdat, 1991. -240 s. -in Russian.
