Аппаратура имитации сигнала, отраженного от объекта локации

Автор: Андрюшин Олег Федорович, Ореховский Владимир Александрович, Рыжов Игорь Альбертович, Фабричный Михаил Григорьевич, Шульгач Олег Владимирович, Ягунов Сергей Константинович
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 1, 2010 года.
Бесплатный доступ
Рассмотрены схемы построения имитаторов отраженного от объекта локации сигнала для комплексов полунатурного моделирования работы систем ближней радиолокации метрового и дециметрового диапазонов длин волн. Имитатор реализован с применением современных технологий, использующих микрополосковые устройства и ПЛИС. Приведены характеристики разработанных аппаратурных модулей.
Система ближней радиолокации, автоматизированный комплекс полунатурного моделирования, математическая модель, управляемая линия задержки, управляемый аттенюатор, устройство сопряжения с пэвм
Короткий адрес: https://sciup.org/14966998
IDR: 14966998
Текст научной статьи Аппаратура имитации сигнала, отраженного от объекта локации
С овременным инструментом, позволяющим эффективно решать сложные задачи всесторонней отработки и испытаний систем ближней радиолокации (СБРЛ), являются автоматизированные комплексы полуна-турного моделирования.
Одним из основных элементов моделирования работы СБРЛ в этих комплексах является воспроизведение процесса электромагнитного взаимодействия СБРЛ с объектами локации (ОЛ). Эта задача решается аппаратно-программными средствами, формирующими сигнал, поступающий на вход приемного устройства испытываемой СБРЛ. Моделирование отраженного сигнала, поступающего на вход СБРЛ в реальном масштабе времени, производится с помощью имитатора, содержащего управляемую линию задержки (УЛЗ) и управляемый аттенюатор [1, 2].
Управление параметрами имитатора производится программно-аппаратными средствами, обеспечивающими выдачу сформированных в математической модели сигналов на управляемые устройства.
Зондирующий высокочастотный радиосигнал, сформированный в СБРЛ, подается на вход имитатора, в котором длина линии задержки и затухание аттенюатора меняются в соответствии с законом изменения параметров реального входного сигнала СБРЛ. В результате сигнал на выходе имитатора приобретает задержку, доплеровское смещение и амплитудную модуляцию, обусловленную изменением мощности отраженного сигнала.
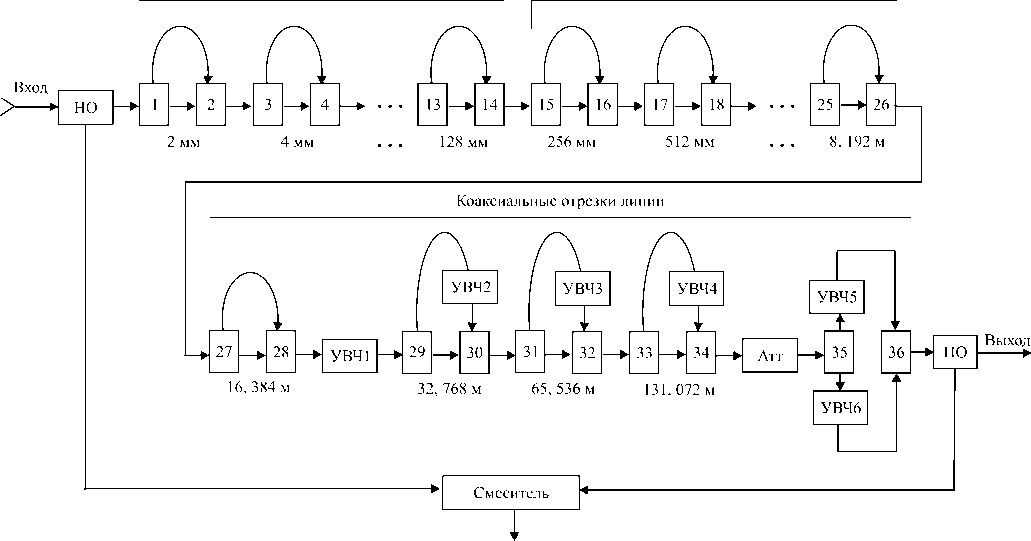
Общий вид и структурная схема имитатора отраженного сигнала приведены на фото 1 и рис. 1 соответственно.
Схема содержит микрополосковую и кабельную части. Отрезки линии за- держки переключаются с помощью СВЧ-ключей переключателями 1 – 36. Для моделирования изменения мощности на входе испытываемой СБРЛ и контроля доплеровского смещения частоты модуль содержит управляемый дискретный аттенюатор и балансный смеситель.
В состав модуля имитатора входят:
-
♦ ответвители;
-
♦ линии задержки, реализованные в микрополосковом исполнении с дискретами электрической длины 2, 4, 8, 16, 32, 64, 128 мм и отрезками коаксиального кабеля с электрическими длинами 256, 512, 1024, 2048, 4096, 8192, 16 384, 32 768, 65 536, 131 072 мм;
-
♦ усилители высокочастотные;
-
♦ аттенюатор дискретный;
-
♦ балансный смеситель;
-
♦ источник вторичного питания.
Для компенсации потерь в длинах от-


Фото 1. Модуль имитатора отраженного сигнала
резков коаксиального кабеля, бóльших 32 м, в них включаются широкополосные СВЧ-усилители.
СВЧ-ключи выполнены на микросхемах HMC239S8 фирмы Hittite, и 74ACT04 (Motorola). Широкополосные СВЧ-усилители построены на микро- схемах HMC311LP3 фирмы Hittite. Управляемый дискретный аттенюатор выполнен на микросхемах HMC239S8 (Hittite), HMC424LP3 (Hittite), 74ACT04 (Motorola).
Для балансного смесителя используется микросхема MXJ-2501-7 фирмы Premier
Devices. Технические характеристики модуля имитатора приведены в табл. 1. Функциональным элементом, обеспечивающим работу моделирующей аппаратуры в реальном масштабе времени, является устройство сопряжения, передающее сформированные в математической модели сигналы на управляемые устройства имитатора. Эти сигналы в виде массивов данных хранятся в ОЗУ устройства сопряжения. При работе в реальном масштабе времени по команде ПУСК массив из памяти устройства сопряжения с заданной тактовой частотой поступает на управляемые устройства. Объем необходимой памяти зависит от моделируемой дистанции полета L , погрешности представления данных, длины волны зондирующего сигнала и количества разрядов, требуемых для управления.
Если Lmax = 200 м, шум квантования порядка 40 дБ и число разрядов для управления равно 25 (17 – линия задержки и 8 – цифровой аттенюатор), то объем ОЗУ должен быть не менее 200 кБ, тактовая частота выдачи информации – не менее 300 кГц [2].
На устройство сопряжения, кроме задач управления каналом моделирова-
Коаксиальные отрезки линии
Микрополосковые отрезки линии
Выход смесителя
Рис. 1. Структурная схема модуля имитатора отраженного сигнала:
1–36 – СВЧ-переключатели линии задержки; НО – направленный ответвитель; УВЧ – усилитель высокой частоты;
Атт – аттенюатор дискретный
Таблица 1. Технические характеристики модуля имитатора
|
Характеристика |
Значение |
|
Диапазон частот, МГц, не хуже |
100…1500 |
|
Неравномерность АЧХ, дБ, не более |
±2 |
|
Начальная моделируемая длина, м, не более |
1,5 |
|
Начальные потери сигнала в линии, дБ, не более |
2 |
|
Суммарные потери сигнала в линии задержки при всех включенных разрядах, дБ, не более |
20 |
|
Уровень входного сигнала, мВт, не более |
10 |
|
Количество разрядов линии задержки |
17 |
|
Диапазон ослабления аттенюатора, дБ |
0,5…96 |
|
Шаг аттенюатора, дБ |
0,5 |
|
Количество разрядов аттенюатора |
8 |
|
Время переключения разрядов в линиях задержки, нс |
10 |
|
Время переключения разрядов аттенюатора, нс |
50 |
|
Волновое сопротивление, Ом |
50 |
ния полезного сигнала, возлагаются также задачи управления каналами моделирования помех, поэтому необходимо предусматривать запас по производительности устройства (объем памяти и тактовая частота).
Стандартные платы цифрового ввода-
-
♦ для формирования импульсных последовательностей произвольной формы используется виртуальный импульсный генератор (Pattern-генератор) со своей независимой памятью;
-
♦ отсчет времен от момента начала процесса моделирования работы СБРЛ до момента ее срабатывания производится тремя счетчиками времени: 0…65 000 мс с дискретом 1 мс, 0…1000 мс с дискретом 1 мкс, 0...1000 нс с дискретом 5 нс;
-
♦ число выходных управляющих разрядов – 128;
-
♦ передача информации на светодиодные индикаторы производится плоским 16-проводным кабелем в последовательном формате;
-
♦ основные функции устройства реализованы на основе ПЛИС XC2S200-PQ208C фирмы XLINX и микроконтроллера AT89S52-24A1.
Блок-схема устройства сопряжения приведена на рис. 2.
Устройство содержит два функциональных модуля: первый – для управления СВЧ-переключателями линии задержки и аттенюатором при проведении моделирования в реальном масштабе времени – «электронный пуск»; второй – для обеспечения генерации импульсной последовательности, используемой для формирования модулирующей функции импульсных помех.
Работа первого модуля происходит следующим образом ( рис. 2 ).
Массив данных, сформированный в математической модели, через USB- вывода информации, обладая необходимым быстродействием и возможностью наращивания памяти, имеют два существенных недостатка. Это, во-первых, недостаточное число параллельных цифровых каналов и, во-вторых, отсутствие принудительного останова вывода информации с фиксацией времени останова. Отмеченные недостатки ограничивают применение стандартных плат в качестве управляющего устройства в задачах моделирования сигналов. Поэтому для решения перечисленных выше задач, возлагаемых на устройство сопряжения, была разработана специализированная плата со следующими характеристиками:
-
♦ массив данных, сформированный в математической модели, передается в память устройства (статическое ОЗУ объемом 4096 кБ) через USB-порт;
-
♦ тактирование выдачи данных из ОЗУ может производиться как внутренним, так и внешним тактовым генератором с частотой 0…20 МГц;
Фото 2. Плата устройства сопряжения

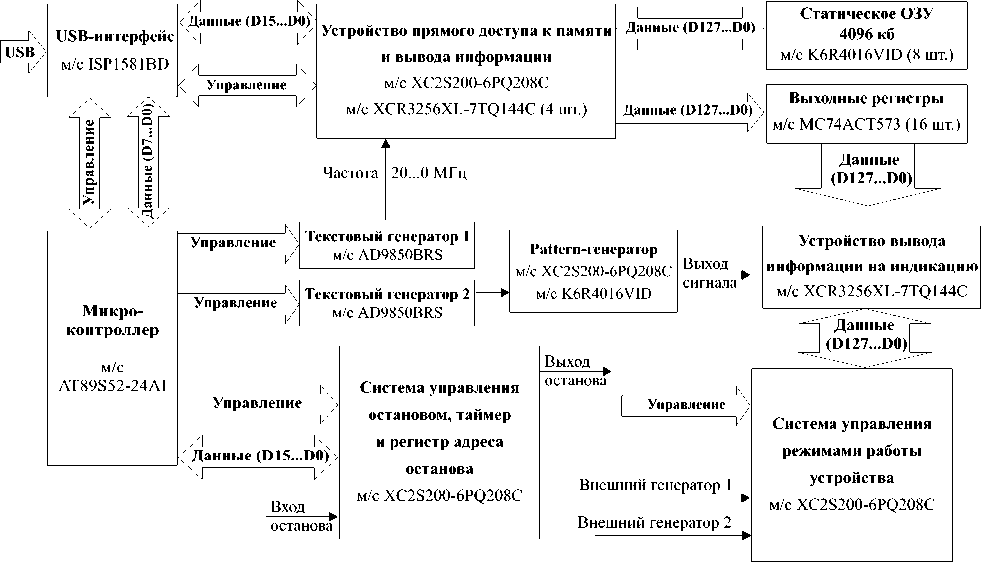
Рис. 2. Блок-схема устройства сопряжения
порт (микросхема (м/с) ISP1581BD) с помощью устройства прямого доступа к памяти (м/с XC2S200-6PQ208C и 4 м/с XCR3256XL-7TQ144C) записывается в ОЗУ (8 м/с K6R4016V1D, объем памяти 4096 кБ) под управлением микроконтроллера (м/с AT89S52-24A1). По команде ПУСК контроллер передает данные из ОЗУ через устройство прямого доступа к памяти в виде 128-раз-рядного параллельного кода на выходные регистры (м/с 74ACT573) и далее на входы управляемых устройств имитатора. Выдача данных тактируется тактовым генератором 1 (м/с AD9850BRS) или внешним генератором через схему управления режимами работы (м/с XC2S200-6PQ208C). По команде ПУСК также запускается таймер, входящий в состав схемы управления остановом (м/с XC2S200-6PQ208C).
Процесс выдачи массива останавливается либо по команде ОСТАНОВ (срабатывание СБРЛ), либо по завершении выдачи всего массива данных (если срабатывания не было). По команде ОСТАНОВ в регистр адреса останова схемы управления остановом (м/с XC2S200-6PQ208C) записывается шаг, на котором произошло срабатывание, и интервал времени, рассчитанный таймером. Как отмечалось выше, второй мо- дуль, входящий в состав устройства, обеспечивает генерацию импульсной последовательности. Данный Pattern-генератор построен на микросхеме XC2S200-6PQ208C и содержит ОЗУ на микросхеме K6R4016V1D (объем памяти 512 кБ). Выдача импульсной последовательности с Pattern-генератора тактируется либо внутренним генератором 2 (м/с AD9850BRS), либо внешним генератором, сигнал с которого поступает на вход схемы управления режимами работы устройства.
Для отображения и контроля выдаваемой устройством информации в состав этого блока включена плата индикации (м/с XCR3256XL-7TQ144C).
Конструктивное исполнение устройства сопряжения (плата) показано на фото 2.
Список литературы Аппаратура имитации сигнала, отраженного от объекта локации
- Андрюшин О.Ф., Болдырев Г.М., Фабричный М.Г. Имитационное моделирование электродинамического взаимодействия систем ближней радиолокации с объектами, формирующими суммарный входной сигнал/Специальная техника, 2006. -№ 6.
- О.Ф. Андрюшин О.Ф., Болдырев Г.М, Павлов Г.Л., Сучков В.Б., Фабричный М.Г. Имитация отраженного эхо-сигнала в комплексах полунатурного моделирования работы систем ближней радиолокации/Оборонная техника, 2009. -вып. 4/5.
