Applied quantum soft computing: sustainable SW & HW toolkit of robust intelligent robotic controllers

Author: Reshetnikov Andrey, Ulyanov Sergey
Journal: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Article in issue: 1, 2018.
Free access
A generalized design strategy of intelligent robust control systems based on quantum/soft computing technologies that enhance robustness of hybrid intelligent controllers by supplying a self-organizing capability is described. We stress our attention on the robustness features of intelligent control systems in unpredicted control situations with the simulation of Benchmark.
Intelligent control, quantum algorithm, self-organization, knowledge base, quantum fuzzy inference
Short address: https://sciup.org/14123282
IDR: 14123282
Применение квантовых мягких вычислений: надежная программно-аппаратная поддержка робастных интеллектуальных контроллеров
Описана обобщенная стратегия проектирования интеллектуальных робастных систем управления на основе технологий квантовых / мягких вычислений, которые повышают надежность гибридных интеллектуальных контроллеров, обеспечивая возможность самоорганизации. Основное внимание уделено свойствам робастности интеллектуальных систем управления в непредвиденных ситуациях управления с помощью моделирования типовых объектов управления.
Text of the scientific article Applied quantum soft computing: sustainable SW & HW toolkit of robust intelligent robotic controllers
For complex and ill-defined dynamic control objects that are not easily controlled by conventional control systems (such as P-[I]-D-controllers) — especially in the presence of fuzzy model parameters and different stochastic noises — the System of Systems Engineering methodology provides fuzzy controllers (FC) as one of alternative way of control systems design.
Soft computing methodologies, such as genetic algorithms (GA) and fuzzy neural networks (FNN) had expanded application areas of FC by adding optimization, learning and adaptation features.
But still now it is difficult to design optimal and robust intelligent control system, when its operational conditions have to evolve dramatically (aging, sensor failure and so on).
Such conditions could be predicted from one hand, but it is difficult to cover such situations by a single FC. Using unconventional computational intelligence toolkit we propose a solution of such kind of generalization problems by introducing a self - organization design process of robust KB - FC that supported by the Quantum Fuzzy Inference (QFI) based on quantum soft computing ideas [1 – 3].
Problem’s Formulation
Main problem and toolkit
One of main problem in modern FC design is how to design and introduce robust KBs into control system for increasing self-learning, self-adaptation and self-organizing capabilities that enhance robustness of developed FC in unpredicted control situations.
The learning and adaptation aspects of FC’s have always the interesting topic in advanced control theory and system of systems engineering. Many learning schemes were based on the back-propagation (BP) algorithm and its modifications (see, for example, [1] and their references). Adaptation processes are based on iterative stochastic algorithms.
These ideas are successfully working if we perform our control task without a presence of ill-defined stochastic noises in environment or without a presence of unknown noises in sensors systems and control loop, and so on.
For more complicated control situations learning and adaptation methods based on BP-algorithms or iterative stochastic algorithms do not guarantee the required robustness and accuracy of control.
The solution of this problem based on SCO was developed in [2]. For achieving of self-organization level in intelligent control system it is necessary to use QFI [3, 4]. The described self-organizing FC design method is based on special form of QFI that uses a few of partial KBs designed by SCO.
QFI uses the laws of quantum computing technologies [5] and explores three main unitary operations: (i) superposition; (ii) entanglement (quantum correlations); and (iii) interference. According to quantum gate computation, the logical union of a few KBs in one generalized space is realized with superposition operator; with entanglement operator (that can be equivalently described by different models of quantum oracle [6]) a search of a “successful” marked solution is formalized; and with interference operator we can extract “good” solutions with classical measurement operations [7].
Method of solution
Proposed QFI system consists of a few KB-FCs, each of which has prepared for appropriate conditions of control object and excitations by Soft Computing Optimizer (SCO) [2]. QFI system is a new quantum control algorithm of self-organization block, which performs post processing of the results of fuzzy inference of each independent FC and produces in on-line the generalized control signal output [4].
In this case the output of QFI is an optimal robust control signal, which combines best features of the each independent FC outputs. Therefore the operation area of such a control system can be expanded greatly as well as its robustness.
Robustness of control is the background for support the reliability of advanced control accuracy in uncertainty and information risk [5].
The simulation example of robust intelligent control based on QFI is introduced.
Main goal
The main technical purpose of QFI is to supply a self-organization capability for many (sometimes unpredicted) control situations based on a few KBs. QFI produces robust optimal control signal for the current control situation using a reducing procedure and compression of redundant information in KB’s of individual FCs. Process of rejection and compression of redundant information in KB’s uses the laws of quantum information theory [5 – 7].
Decreasing of redundant information in KB-FC increases the robustness of control without loss of important control quality as reliability of control accuracy. As a result, a few KB-FC with QFI can be adapted to unexpected change of external environments and to uncertainty in initial information.
We introduce main ideas of quantum computation and quantum information theory [6] applied in developed QFI methods. Quantum Fuzzy Inference ideas are introduced. Robustness of new types of selforganizing intelligent control systems is demonstrated.
SCO-structure based on soft computing
KB of FC creation
SCO uses the chain of GAs (GA1, GA2, GA3) and approximates measured or simulated data (TS) about the modeled system with desired accuracy or using real robot for it. GA1 solves optimization problem connected with the optimal choice of number of membership functions and their shapes. GA2 searches optimal KB with given level of rules activation. Introduction of activation level of rules allows us to sort fuzzy rules in accordance with value information and design robust KB. GA3 refines KB by using a few criteria.
Figure 2 shows the flow chart of SCO operations on macro level and combines several stages.
Input: Teaching Signal
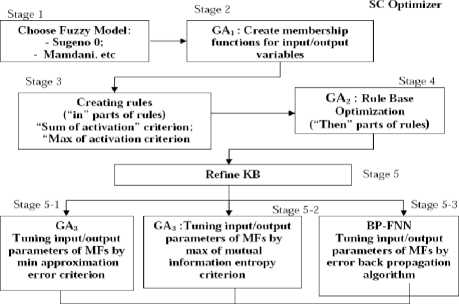
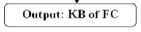
Figure 1: Flow chart of SC Optimizer
Stage 1: Fuzzy Inference System (FIS) Selection. The user makes the selection of fuzzy inference model with the featuring of the following initial parameters: Number of input and output variables; Type of fuzzy inference model (Mamdani, Sugeno, Tsukamoto, etc.); Preliminary type of MFs.
Stage 2: Creation of linguistic values. By using the information (that was obtained on Stage 1), GA1 optimizes membership functions number and their shapes, approximating teaching signal (TS), obtained from the in-out tables, or from dynamic response of control object (real or simulated in Matlab).
Stage 3: Creation rules. At this stage we use the rule rating algorithm for selection of certain number of selected rules prior to the selection of the index of the output membership function corresponding to the rules. For this case two criteria based on a rule’s activation parameter called as a “manual threshold level” (TL). This parameter is given by a user (or it can be introduced automatically).
Stage 4: Rule base optimization. GA2 optimizes the rule base obtained on the Stage 3, using the fuzzy model obtained on Stage 1, optimal linguistic variables, obtained on Stage 2, and the same TS as it was used on Stage 1. Rule base optimization can be performed by using mathematical model, or by using distance connection to real control object.
Stage 5: Refine KB. On this stage, the structure of KB is already specified and close to global optimum. In order to reach the optimal structure, a few methods can be used.
First method is based on GA3 with fitness function as minimum of approximation error, and in this case KB refining is similar to classical derivative based optimization procedures (like error back propagation (BP) algorithm for FNN tuning). Second method is also based on GA3 with fitness function as maximum of mutual information entropy. Third method is realized as pure error back propagation (BP) algorithm. BP algorithm may provide further improvement of output after genetic optimization. As output results of the Stages 3, 4 and 5, we have a set of KB corresponding to chosen KB optimization criteria.
Remote rule base optimization
Remote KB optimization is performed on the fourth stage of designing FC (Fig. 1). The implementation of the physical environment connection intends to use additional equipment for the data transfer, such as radio channel, Bluetooth, WiFi or a cable connection, such as USB. Exchange of information between the management system and the SCO intended to form a KB (Fig. 2).
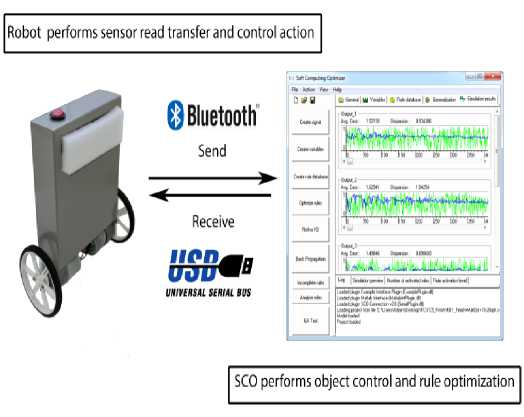
Figure 2: Remote rule base optimization scheme
The control system reads the sensors and sends data to a computer for further processing. By taking input values, SCO evaluates previous decision (KB-FC) and performs fuzzy inference to check the following solutions (KB-FC). The result of the fuzzy inference is sent to the remote device. Thereafter, the control system by processing the input values generates control action.
Synchronization of SCO and control systems is based on the remote device (robot). To this end, a special program (firmware) is developed.
Connection profile uses the serial port. Transmission rate in this case is 115,200 bits / sec. During operation, floats in symbolic form are passing via COM-port. Connection to SCO uses designed plug-in. Before establishing a connection to the SCO, COM port number and the check time of one solution (the number of cycles of the system to test solution) are selected.
QFI-structure based on quantum computing
For design of QFI based on a few KBs it is needed to apply the additional operations to partial KBs outputs that drawing and aggregate the value information from different KBs. Soft computing tool does not contain corresponding necessary operations [8].
The necessary unitary reversible operations are called as superposition, entanglement (quantum correlation) and interference that physically are operators of quantum computing in information processing.
We introduce briefly the particularities of quantum computing and quantum information theory that are used in the quantum block QFI (Fig. 3) supporting a self-organizing capability of FC in robust intelligent control system (ICS).
Figure 3: Structure of robust ICS based on QFI
Quantum computing cl
In Hilbert space the superposition of classical states called quantum bit (qubit) means that False and True are jointed in one state with different probability amplitudes, i, , . If the н 1 f11
h = ^1I
Hadamard transform 2^ ^ - ^ is independently applied to different classical states then a tensor product of superposition states is the result:

The fundamental result of quantum computation stays that all of the computation can be embedded in a circuit, which nodes are the universal gates. These gates offer an expansion of unitary operator U that evolves the system in order to perform some computation. Thus, naturally two problems are discussed: (i) Given a set of functional points $ {(x, y)} find the operator U such thaty = U' x ; (ii) Given a problem, fined the quantum circuit that solves it. Algorithms for solving these problems may be implemented in a hardware quantum gate or in software as computer programs running on a classical computer.
It is shown that in quantum computing the construction of a universal quantum simulator based on classical effective simulation is possible [3, 6, 7].
In the general form, the model of quantum algorithm computing comprises the following five stages:
-
• preparation of the initial state ' ^ out^ (classical or quantum);
-
• execution of the Hadamard transform for the initial state in order to prepare the superposition state;
-
• application of the entangled operator or the quantum correlation operator (quantum oracle) to the superposition state;
-
• application of the interference operator;
-
• application of the measurement operator to the result of quantum computing | ^ out .
Hence, a quantum gate approach can be used in a global optimization of KB structures of ICSs that are based on quantum computing, on a quantum genetic search and quantum learning algorithms [8].
Quantum information resources in QFI algorithm
Figure 4 shows the algorithm for coding, searching and extracting the value information from two KBs of fuzzy PID controllers designed by SCO.
Thus the quantum algorithm for QFI (Fig. 5) the following actions are realized [5]:
-
• The results of fuzzy inference are processed for each independent FC;
-
• Based on the methods of quantum information theory, valuable quantum information hidden in independent (individual) knowledge bases is extracted;
-
• In on-line, the generalized output robust control signal is designed in all sets of knowledge bases of the fuzzy controller.
-
• In this case, the output signal of QFI in on-line is an optimal signal of control of the variation of the gains of the PID controller, which involves the necessary (best) qualitative characteristics of the output control signals of each of the fuzzy controllers, thus implementing the selforganization principle.
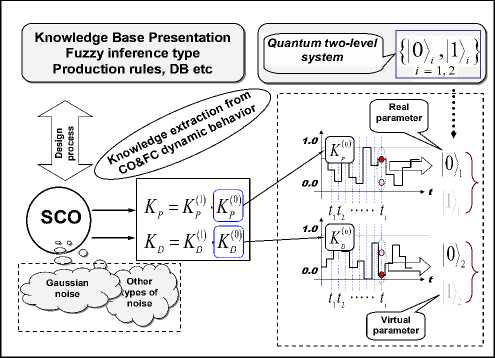
Figure 4: Example of information extraction in QFI
Therefore, the domain of efficient functioning of the structure of the intelligent control system can be essentially extended by including robustness, which is a very important characteristic of control quality.
max. for normalization probability density function max K
P
K FC1

Choice of Correlation type
normalization
K FC2
Input
T emplating
I
quantum state
(Q-bit) II
2 4 = 16 possibilities
1.Superposition
Self-Organization
3.Interference
2.Entanglement
(Oracle)
max. probability Amp.
Extraction of hidden quantum information selected (measured) possibility
QFI block
4 states selection
III
IV
Grover’s
Searching Q-Gate should be implemented

VI
Decoding New K
QFI
scaling factorp=— C = { Cp , CD , Cp }
Result
-
Figure 5: The structure of QFI gate
The robustness of the control signal is the background for maintaining the reliability and accuracy of control under uncertainty conditions of information or a weakly formalized description of functioning conditions and/or control goals.
QFI model based on physical laws of quantum information theory, for computing use unitary invertible (quantum) operators and they have the following names: superposition, quantum correlation (entangled operators), and interference. The forth operator, measurement of result quantum computation is irreversible.
Optimal drawing process of value information from a few KBs that are designed by soft computing is based on following four facts from quantum information theory [4]: (i) the effective quantum data compression; (ii) the splitting of classical and quantum parts of information in quantum state; (iii) the total correlations in quantum state are “mixture” of classical and quantum correlations; and (iv) the exiting of hidden (locking) classical correlation in quantum state [6, 9].
This quantum control algorithm uses these four Facts from quantum information theory: (i) compression of classical information by coding in computational basis {^^' ^} and forming the quantum correlation between different computational bases (Fact 1); (ii) separating and splitting total information and correlations on “classical” and “quantum“ parts using Hadamard transform (Facts 2 and 3); (iii) extract unlocking information and residual redundant information by measuring the classical correlation in quantum state (Fact 4) using criteria of maximal corresponding amplitude probability.
These facts are the informational resources of QFI background. Using these facts it is possible to extract an additional amount of quantum value information from smart KBs produced by SCO for design a wise control using compression and rejection procedures of the redundant information in a classical control signal.
Below we discuss the application of this quantum control algorithm in QFI structure.
Remote quantum base optimization
As the adjustable parameter scaling factor is used in remote quantum base optimization. Scaling factor is used in the final step of forming the gain of PID (Fig. 5).
During operation, floats in symbolic form are passed via COM-port. The control system reads the sensors and sends them to a computer for further processing. By taking the input values, the GA evaluates the previous decision, and carries a quantum fuzzy inference to check the following solutions. The result of the fuzzy inference is sent to the remote device. Thereafter, the control system by processing the input values generates control action. Connecting to QFI developed through a plug-in.
Before establishing a connection to the SCO, COM port number and the check time of one solution (the number of cycles of the system to test solution) are selected (Fig. 6).
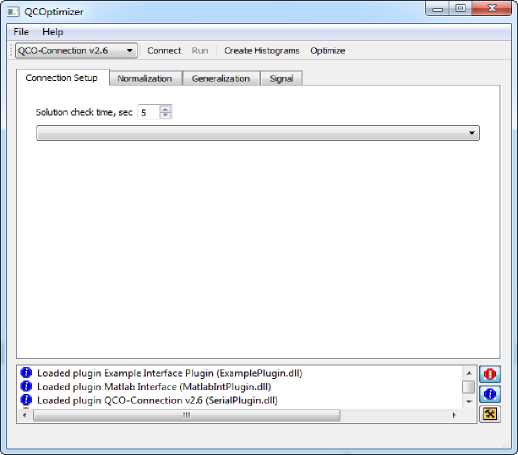
Figure 6: Remote connection plug-in for QCOptimizer
References Applied quantum soft computing: sustainable SW & HW toolkit of robust intelligent robotic controllers
- L.V. Litvintseva, K. Takahashi, and S.V. Ulyanov, "Intelligent robust control design based on new types of computation", Note del Polo Ricerca, Università degli Studi di Milano (Polo Didattico e di Ricerca di Crema) Publ., Vol. 60, 2004; European Patent (EP) PCT 023970, 2005.
- L.V. Litvintseva, S.V. Ulyanov, and S. S. Ulyanov, "Design of robust knowledge bases of fuzzy controllers for intelligent control of substantially nonlinear dynamic systems: II A soft computing optimizer and robustness of intelligent control systems", J. of Computer and Systems Sciences Intern., vol. 45, № 5, pp. 744 - 771; 2006.
- US Patent No 6,578,018B1, "System and method for control using quantum soft computing" (Inventor: S.V. Ulyanov), US Patent No 7,383,235 B1, 2003; EP PCT 1 083 520 A2, 2001.
- L.V. Litvintseva and S.V. Ulyanov, "Quantum fuzzy inference for knowledge base design in robust intelligent controllers", J. of Computer and Systems Sciences Intern, vol. 46, № 6, pp. 908 - 961, 2007.
- L.V. Litvintseva and S.V. Ulyanov, Quantum information and quantum computational intelligence: Quantum optimal control and filtering - stability, robustness, and self-organization models in nanotechnologies. Note del Polo Ricerca, Università degli Studi di Milano (Polo Didattico e di Ricerca di Crema) Publ., vols 81&82, 2005 - 2007.
