Архитектура бортового комплекса управления для малых космических аппаратов на основе сетевых технологий

Автор: Непомнящий Олег Владимирович, Постников Александр Иванович, Горева В.В., Варочкин С.С.
Журнал: Космические аппараты и технологии.
Рубрика: Космическое приборостроение
Статья в выпуске: 1 (19), 2017 года.
Бесплатный доступ
Рассмотрены способы организации сетевого взаимодействия бортовой аппаратуры космических аппаратов на основе стандарта SpaceWire. Предложена архитектура реконфигурируемого бортового комплекса управления. С целью обеспечения реконфигурируемости, программной настройки, универсальности и соответствия действующим международным и российским стандартам по эксплуатации космических аппаратов и бортовой аппаратуры в основу разрабатываемого бортового вычислительного комплекса положен магистрально-модульный принцип интеграции аппаратных средств. Это позволяет создать на борту единое информационное пространство на основе бортовой коммуникационной сети стандарта SpaceWire/SpaceWire-RUS. Основным вычислительным узлом комплекса является центральный процессорный модуль, а сетевая архитектура строится на основе маршрутиризирующих сетевых коммутаторов. Это позволяет организовать модульное построение комплекса на основе принципа взаимозаменяемости аппаратных модулей, входящих в его состав...
Малый космический аппарат, бортовой комплекс управления, сеть
Короткий адрес: https://sciup.org/14117388
IDR: 14117388 | УДК: 735.29
Architecture of onboard control system for small spacecrafts based on network technologies
The methods of organizing the network interaction of onboard spacecraft equipment on the basis of SpaceWire standard are considered. The architecture of the reconfigurable onboard control complex is proposed. With the aim of ensuring reconfigurability, software customization, universality and satisfaction with the current international and Russian standards for the operation of spacecrafts and onboard equipment, the basis of the onboard computer system under development is the trunk-module principle of hardware integration. This allows to create on board a single information space based on the onboard communication network standard SpaceWire / SpaceWire-RUS. The main computing unit of the complex is a central processing unit, and the network architecture is built on the basis of routing network switches. This allows to organize a modular construction of the complex, based on the principle of interchangeability of the hardware modules included in its composition. This approach allows integration of various onboard equipment into a single information and computing system based on standard interfaces...
Текст научной статьи Архитектура бортового комплекса управления для малых космических аппаратов на основе сетевых технологий
Особенностью разработки и изготовления архитектуры бортового комплекса управления (БКУ) на основе сетевых технологий является создание на космической платформе спутника такой
-
1 © Непомнящий О. В., Постников А. И., Горева В. В., Варочкин С. С., 2017
инфраструктуры передачи данных, которая позволяет легко дублировать основные компоненты сети, иметь несколько альтернативных путей передачи данных, масштабировать или модифицировать сеть под имеющееся оборудование на борту космического аппарата (КА).
Благодаря этому сетевая концепция в отличие от традиционного подхода позволяет добиться следующих преимуществ [1]:
-
- высокой надежности, сбое- и отказоустойчивости при приемлемом уровне затрат аппаратного резервирования;
-
- уменьшения массогабаритных показателей и потребляемой мощности;
-
- унификации интерфейсов и каналов передачи данных;
-
- технико-экономических показателей, позволяющих отечественным КА конкурировать на глобальном рынке с лучшими мировыми аналогами.
Разработка БКУ на основе высокоэффективных информационно-управляющих бортовых сетей и модульной конструкции является актуальной практической задачей и проводится в рамках приоритетных направлений Стратегической программы исследований технологической платформы «Национальная информационная спутниковая система» (ТП НИСС) на 2012–2020 годы.
Наиболее перспективной сетевой технологией является сеть, выполненная на основе стандарта SpaceWire (ECSS-E-50-12C) Европейского космического агентства, разработанного специально для применения в управляющих сетях на борту КА [2]. Причины выбора SpaceWire для построения БКУ на основе сетевых технологий следующие:
-
- открытость технологии, что обеспечивает неограниченность при выборе того или иного сегмента будущей сети;
-
- масштабируемость технологии, добавление/уда-ление из системы составной части не приводит к доработке или переработке всей системы;
-
- высокая пропускная способность, что дает возможность применять технологию для обеспечения обмена с целевой аппаратурой, формирующей большие объемы данных;
-
- поддержка большого числа абонентов сети для применения на больших аппаратах;
-
- наличие элементной базы космического применения.
Помимо выпущенного зарубежного стандарта SpaceWire в настоящее время ведутся работы по созданию российского аналога SpaceWire-RUS, применение которого упростит производство оборудования, поддерживающего SpaceWire на отечественных предприятиях.
В российской космической отрасли развивать и внедрять технологию SpaceWire стратегически важно, поскольку она способствует обеспечению современных тактико-технических характеристик перспективных российских КА, конкурентоспособности на мировом рынке космических технологий и услуг, развитию международного сотрудничества в космической области с другими странами, совместимости и унификации разработок аппаратуры КА российских предприятий.
Методы решения
В качестве примера рассмотрим различные варианты топологии сети на основе SpaceWire.
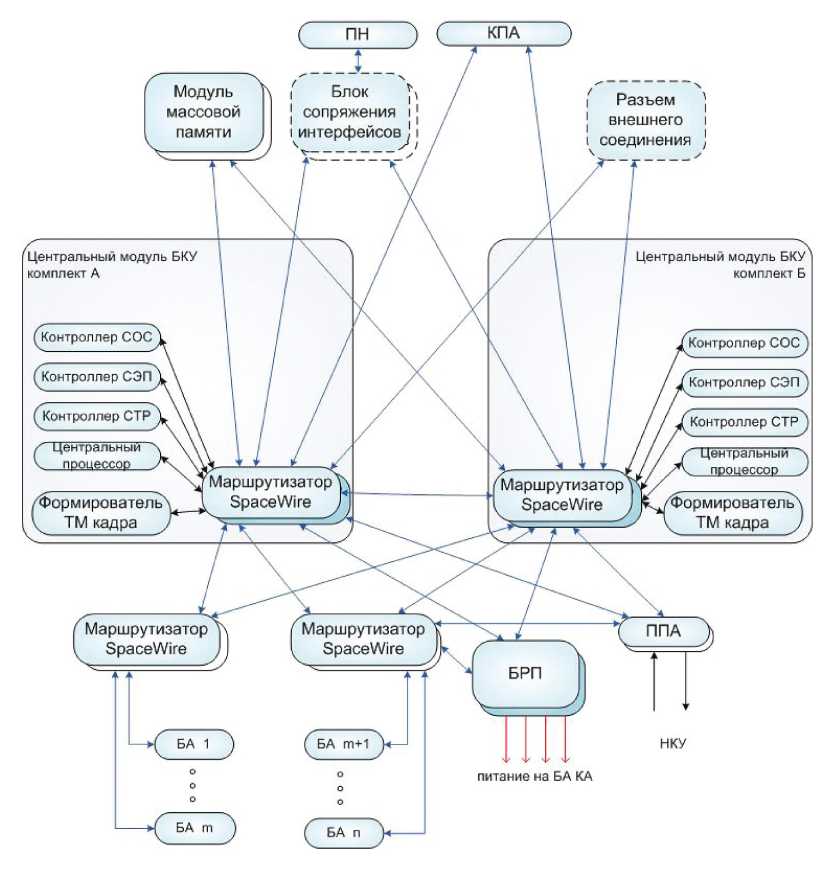
Архитектура БКУ с распределённой системой управления (РСУ) показана на рис. 1.
Архитектура БКУ с централизованной системой управления (ЦСУ) показана на рис. 2.
Центральный модуль БКУ имеет другую структуру – функции контроллеров СОС, СЭП, СТР и центрального процессора выполняет ЦВМ.
В случае применения центрального модуля сеть SpaceWire является ячеистой (решетчатой), то есть сетью, в которой существуют узлы, соединенные между собой несколькими путями.
Бортовая аппаратура (БА), соединенная с центральным модулем БКУ через маршрутизаторы, является датчиками систем КА или исполнительными органами (ИО). Общее количество датчиков и ИО равно n .
Разбиение БА на группы с индексами (1... m ) и ( m + 1... n ) производится в зависимости от ее пространственного положения на КА так, чтобы в одну группу, объединяемую в сеть SpaceWire маршрутизатором, входила бортовая аппаратура, расположенная на одной стороне КА. Такая структура сети SpaceWire позволяет сократить объем бортовой кабельной сети [3].
Число групп БА, каждая из которых объединяется маршрутизатором, зависит от общего количества n и от числа линков, подсоединяемых к одному маршрутизатору. Так, при большом числе БА количество групп БА следует увеличить в связи с ограниченным числом связей одного маршрутизатора SpaceWire. Стандарт ECSS-E-ST-50-12C ограничивает число портов маршрутизатора 32 (включая конфигурационный порт).
Как видно из рис. 1 и 2, отличия БКУ РСУ и ЦСУ с ячеистой структурой сводятся к прошивке ПЛИС центрального модуля.
Каждая из приведенных схем имеет свои преимущества и недостатки относительно друг друга. Преимуществами РСУ относительно ЦСУ являются быстродействие и гибкость управления, однако это влечет за собой усложнение программирования ПЛИС центрального модуля [4–5].
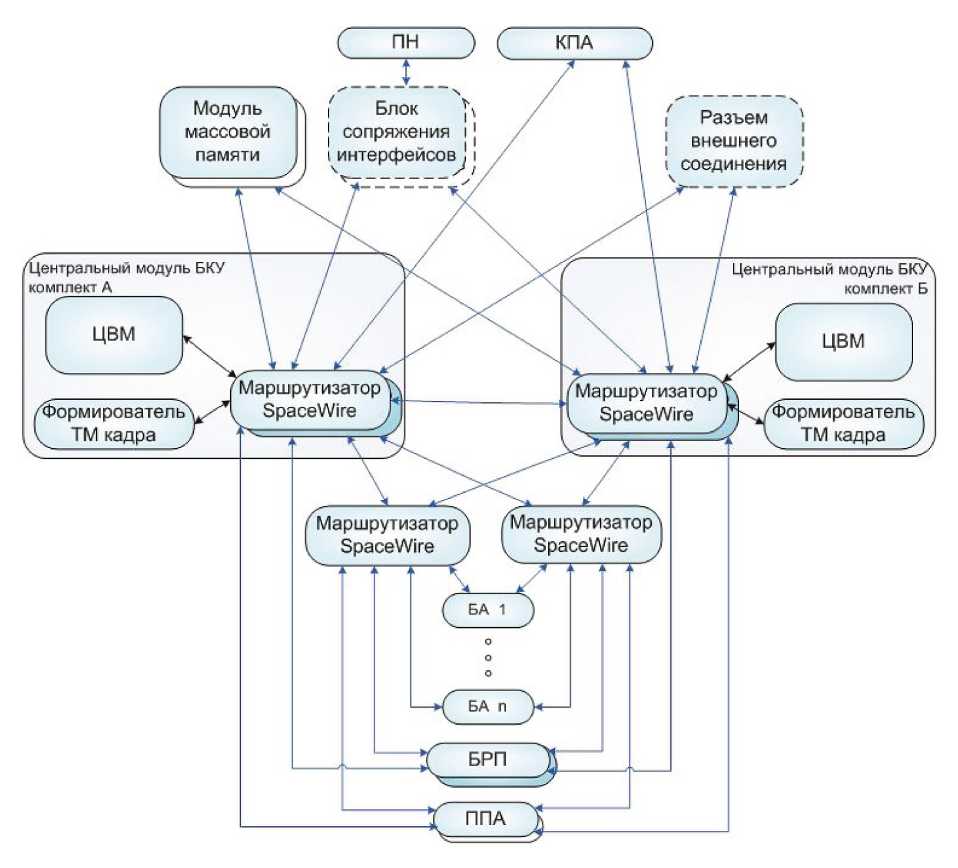
В приведенных схемах БКУ маршрутизаторы SpaceWire играют роль концентраторов для датчиков и разделителей для исполнительных органов, обеспечивая сопряжение БА с центральным модулем БКУ и сокращая бортовую кабельную сеть. Каждый из этих маршрутизаторов резервирован. Однако существует возможность отказаться от их резервирования без потери надежности. Рассмотрим такую возможность на примере БКУ с ЦСУ (БКУ с ЦСУ модификация 1 – ЦСУ-М).
Схема, изображенная на рис. 3, имеет более высокие надежность и гибкость управления бортовой аппаратурой, меньшее число маршрутизаторов SpaceWire. Недостатком такой схемы является увеличение бортовой кабельной сети, что влечет за собой увеличение массы. Кроме того, применение данной схемы ограничено числом линков для одного маршрутизатора (максимум 31). Для снятия это-
WW ИССЛЕДОВАНИЯ
Havko-
Том 1
жГРАДА
Контроллер СЭП
Контроллер СТР
ППА
БА 1
БА m+1
БА п
Маршрутизатор SpaceWire
Маршрутизатор SpaceWire
Маршрутизатор SpaceWire
Маршрутизатор SpaceWire
Формирователь . ТМ кадра
Формирователь , ТМ кадра
Центральный процессор
Центральный процессор
КПА
( контроллер С ОС
^Контроллер СОС^
(Контроллер СЭП
(^Контроллер СТР"
НКУ питание на БА КА
Модуль массовой памяти
Центральный модуль БКУ комплект А
' Центральный модуль БКУ
' комплект Б
I Разъем ; внешнего i
1 соединения ]
I Блок
■ сопряжения ।
। интерфейсов ! i
Рис. 1. Структурно-функциональная схема БКУ с РСУ
го ограничения возникает необходимость наращивания сети за счет увеличения числа маршрутизаторов, играющих роль концентраторов данных.
Архитектура БКУ с кольцевой топологией показана на рис. 4. Кольцевая топология предполагает разбиение узлов сети на подгруппы по пространственному принципу: в одной группе находятся расположенные в одной части КА узлы. Число групп равно числу маршрутизаторов, соединенных между собой и расположенных по кольцу. В каждой группе все элементы подсоединяются к сети через два ближайших маршрутизатора.
Во всех рассмотренных схемах ядром БКУ является центральный модуль, располагающийся на одной плате ПЛИС. Такая реализация позволяет повысить быстродействие системы, уменьшить массу и снизить энергопотребление. Однако она имеет и существенные недостатки: крайне высокую сложность изготовления и, соответственно, высокую стоимость. Кроме того, встроенный маршрутизатор SpaceWire является для данной платы точкой единичного отказа, для исключения чего необходимо использовать его резервирование на этой же плате, что еще больше повышает сложность и стоимость схемы.
Рассмотрим реализацию вычислительного ядра в виде нескольких микросхем. Структурнофункциональная схема БКУ с ЦСУ показана на рис. 5.
Теперь построим схему БКУ с кольцевой топологией сети на основе распределенной системы управления (рис. 6). Здесь вычислительное ядро состоит уже из отдельных микросхем контроллеров систем, центрального процессора и формирователя телеметрического кадра.
Как видно из рис. 5 и 6, распределенная структура управления без интеграции вычислительного ядра на одной схеме имеет большее число элементов и линий связи, чем централизованная. Это выражается в увеличении кабелей и размеров всей системы в целом. Поэтому при недоступности реализации вычислительного ядра на
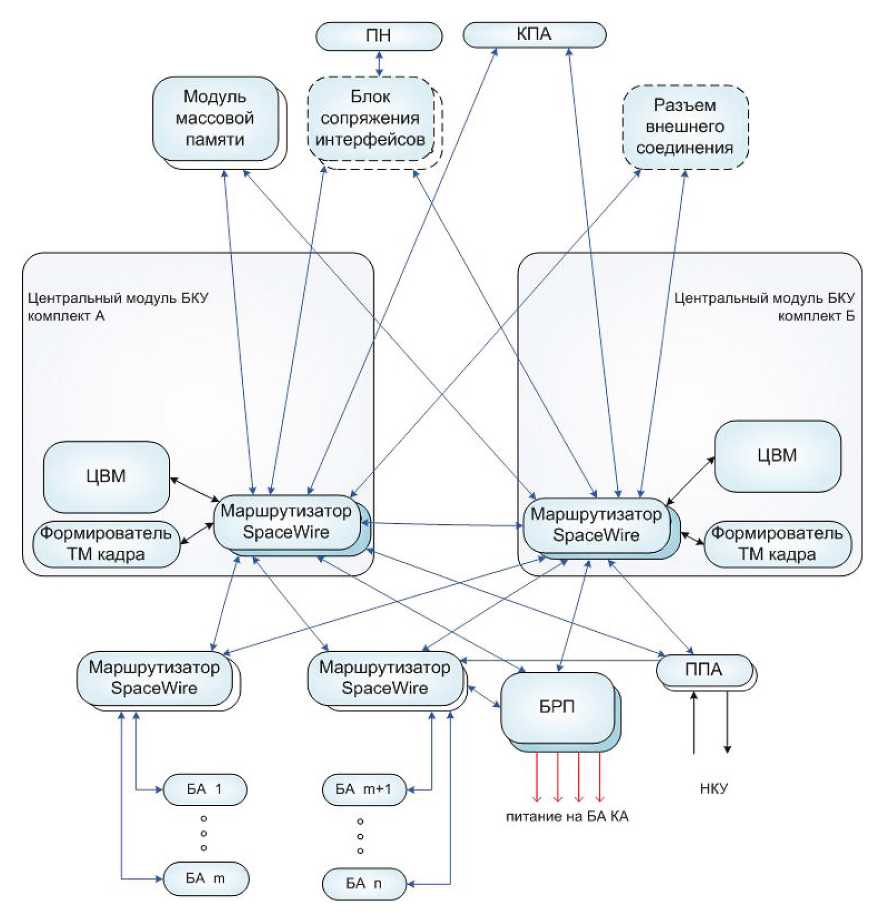
Рис. 2. Структурно-функциональная схема БКУ с ЦСУ
одной ПЛИС предпочтительнее централизованная система управления БКУ, где задачи управления системами КА реализуются в ЦВМ.
Наличие на борту стандартизированного интерфейса и скоростной сети передачи данных создает возможности упрощения интеграции полезной нагрузки и платформы КА. Существенно упрощается задача сбора телеметрической информации как с платформы, так и с полезной нагрузки за счет унифицированного единого механизма, использующего свойства и возможности сети. Кроме того, облегчается создание модульной структуры полезной нагрузки. Это особенно важно в том случае, когда не только платформу, но и КА в целом с использованием собственной платформы выпускают в условиях сокращения цикла производства КА.
Жесткая стандартизация интерфейсов и сетевых протоколов позволит перевести этап отладки сетевых соединений отдельных модулей с системой в целом со стадии сборки КА интегратором в монтажно-испытательном комплексе на стадию разработки модуля, то есть в лабораторные условия.
Наличие реконфигурируемой сети на борту КА упрощает процедуру отладки аппарата из-за отсутствия необходимости перекоммутации разъемов на стенде [6]. Для решения большинства задач достаточно подсоединить одним-единственным разъемом внешние терминалы, рабочие места отладчиков, программные или аппаратные симуляторы посредством моста из локальной сети предприятия в бортовую сеть SpaceWire. Оптимизация внутренней структуры бортовой аппаратуры для решения конкретной прикладной задачи сводится к организации потоков данных в рамках единой бортовой сети путем программирования маршрутизаторов. Структура информационных потоков хорошо поддается моделированию и оптимизации средствами автоматизированного проектирования. Выбранное решение реализуется удаленно и практически мгновенно.
Возможность удаленной реконфигурации ресурсов КА остается и после его запуска, что по-
■J ИССЛЕДОВАНИЯ
Havko-
Том 1
ЖГРАДА
КПА
БА 1
БРП
ППА
Маршрутизатор SpaceWire
Маршрутизатор SpaceWire
Маршрутизатор SpaceWire
Формирователь v ТМ кадра
Формирователь ч ТМ кадра v
। Блок
■ сопряжения I i интерфейсов !
ЦВМ
ЦВМ
БА л
Модуль массовой памяти
/Центральный модуль Б КУ комплект А______
'Маршрутизатор SpaceWire
/ Центральный модуль БЮЛ
/ комплект Б
Разъем внешнего соединения ] г_ ___-
Рис. 3. Структурно-функциональная схема БКУ с ЦСУ-М
зволяет в широких пределах изменять функциональность аппарата в зависимости от задач и, кроме того, повышает его «живучесть».
Все перечисленные факторы сокращают время, которое тратит производитель КА на подготовку решения, максимально удовлетворяющего заказчика, и, соответственно, повышают рыночную привлекательность его изделий и услуг.
Несмотря на преимущества использования сетевой архитектуры SpaceWire для БКУ и КА в целом, на сегодняшний день нет разработанных в России КА с использованием данной сетевой архитектуры.
Причины этого кроются в следующих факторах:
-
- консерватизм космической отрасли в целом;
-
- отсутствие российского стандарта SpaceWire;
-
- отсутствие лётной квалификации сети SpaceWire;
-
- внедрение технологии SpaceWire требует переделки оборудования, что сопряжено с дополнительными материальными затратами и техническими рисками;
-
- некоторые особенности технологии SpaceWire (дополнительное оборудование для организации сети, достаточно большая масса кабелей).
Данные факторы не позволяют создавать большие и дорогие КА для коммерческого или государственного заказчика с использованием сетевой архитектуры SpaceWire в качестве системообразующей сети.
Для выхода из этой ситуации мы видим два пути:
-
- внедрение на КА, создаваемых для государственного заказчика, сетевой архитектуры SpaceWire в качестве дополнительной (экспериментальной) сети для проведения её отработки и получения лётной квалификации;
-
- внедрение архитектуры SpaceWire в качестве системообразующей сети на малых КА, обладающих вновь разработанной аппаратурой, низкой стоимостью, малым сроком активного существования и чаще всего создаваемых в обучающих или экспериментальных целях.
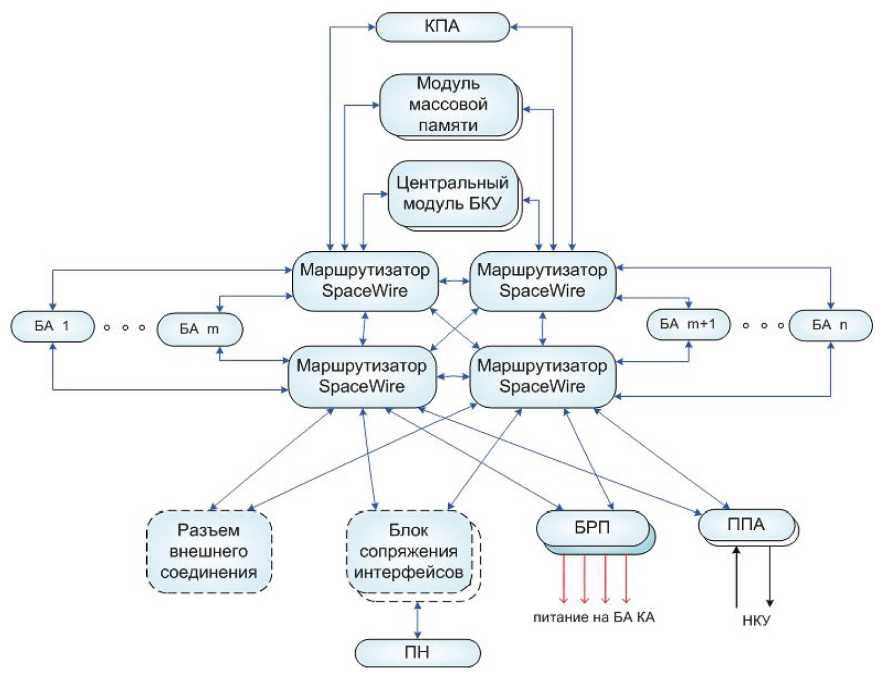
Рис. 4. Структурно-функциональная схема БКУ с кольцевой топологией
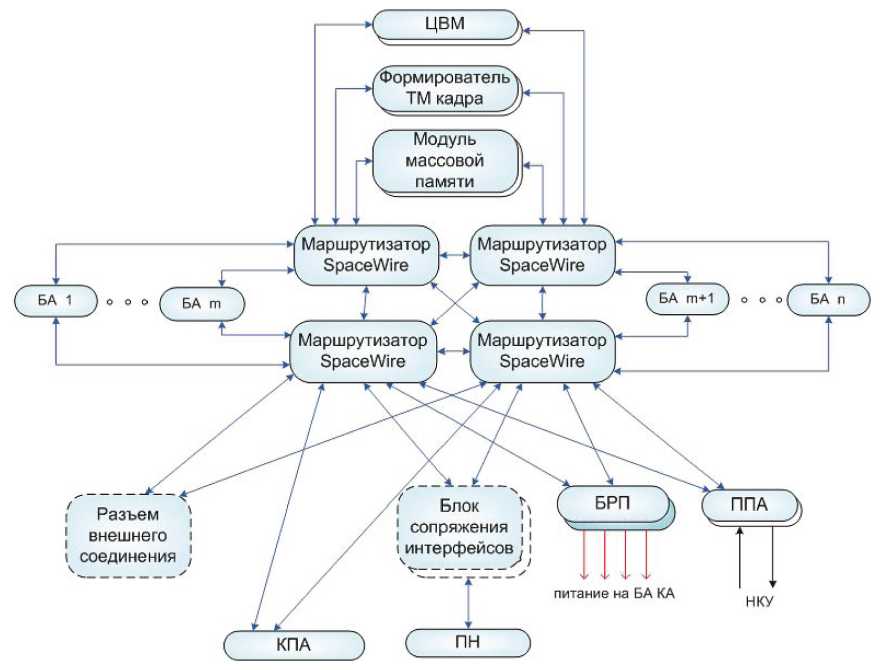
Рис. 5. Структурно-функциональная схема БКУ с кольцевой топологией сети на основе ЦСУ
ГРАДА
Том 1

БА 1
БРП
ППА
КПА
Маршрутизатор Space Ware
Формирователь ТМ кадра
Маршрутизатор Spa се Wire
Маршрутизатор Spa се Wire центральный проц^ор
Модуль массовой памяти j Маршрутизатор
1 Space Wire
^Контроллер С ОС
п питание на БА КА
НКУ пн )
♦
QbA т+1 ^ о
( Разъем ]
внешнего i
1 соединения *
^Контроллер СЭгГ
►(^Контроллер СТР^
Д._£_____х
। Блок
[ сопряжения ।; t интерфейсов ! i
ГП ч
Рис. 6. Структурно-функциональная схема БКУ с кольцевой топологией сети на основе РСУ
Заключение
В настоящее время проект разработки БКУ для малых КА с использованием сетевой архитектуры находится в стадии НИОКР. Специалистами АО «ИСС» и ФГАОУ ВО «СФУ» разработано техническое задание на бортовой комплекс управления и изготавливается его экспериментальный образец.
В ближайшем будущем сетевая аппаратно-программная платформа БКУ станет основой
важнейшего функционального элемента унифицированной цифровой модульной космической платформы – интегрированной информационновычислительной среды, предоставляющей общий пул вычислительных, коммуникационных и информационных ресурсов с возможностью адаптивной реконфигурации под оперативные задачи, обеспечения отказоустойчивости и живучести КА на системном уровне.
Список литературы Архитектура бортового комплекса управления для малых космических аппаратов на основе сетевых технологий
- Nepomnyashchy O.V., Legalov A. I., Sirotinina N. J. High-Level design flows for VLSI circuit // Journal of Siberian Federal University. Engineering & Technologies. 2014. no. 6, pp. 674-684.
- Непомнящий О. В., Вейсов Е. А., Правитель А. С. Однокристалльные системы с динамической реконфигурацией в радиоэлектронной аппаратуре специального назначения // Успехи современной радиоэлектроники. Зарубежная радиоэлектроника. 2014. № 5. С. 25-29.
- Designing a single board computer for space using the most advanced processor and mitigation technologies / L. Longden, e.a. Maxwell Technologies, 2012. 17 p.
- Шахматов А. В., Чекмарев С. А. Процессорный модуль типа «система на кристалле» для малого КА «ТаблетСат-Аврора» // Разработка, производство, испытания и эксплуатация космических аппаратов и систем: науч.-техн. конф. молодых специалистов ОАО «ИСС». 2014. С. 104-106.
- Гришин В. Ю., Ракитин А. В., Костров В. В. Облик перспективного вычислительного комплекса космического базирования с гибкой архитектурой для обработки сигналов // Космическая радиолокация. 2013. C. 52-57.
- Концепция создания бортового комплекса управления для малых космических аппаратов / В. Х. Ханов и др. // Вестник СибГАУ. 2012. № 5 (45). С. 144-149.
