Архитектура и возможности системы пространственной ориентации беспилотных и сверхлегких летательных аппаратов на чувствительных элементах нового поколения

Автор: Батищев Юрий Александров, Дудник Виталий Владимирович, Гуринов Андрей Сергеевич, Копкин Андрей Сергеевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 2 (45) т.10, 2010 года.
Бесплатный доступ
Рассмотрены архитектура и возможности построения системы пространственной ориентации беспилотных и сверхлегких летательных аппаратов на основе современных твёрдотельных инерциальных датчиков. Подтверждена возможность применения микромеханических датчиков для построения недорогой инерциально-навигационной системы для беспилотных и сверхлегких летательных аппаратов.
Инерциально-навигационная система (инс), гироскоп, акселерометр, летательный аппарат, микромеханические инерциальные датчики
Короткий адрес: https://sciup.org/14249346
IDR: 14249346 | УДК: 629.056.6
Architecture and possibilities of attitude system of unmanned and ultralight air vehicles based on sensitive elements of new generation
The architecture and building possibilities of attitude system of unmanned and ultralight air vehicles based on modern inertial sensors are considered. Executed development testing has corroborated possibility of using micromechanic sensors for the construction of an inexpensive inertial navigation system for unmanned and ultralight air vehicles.
Текст научной статьи Архитектура и возможности системы пространственной ориентации беспилотных и сверхлегких летательных аппаратов на чувствительных элементах нового поколения
Введение. Конец ХХ и начало ХХI веков ознаменовались во всём мире бурным развитием беспилотных летательных аппаратов (БЛА) и пилотируемых сверхлёгких летательных аппаратов (СЛА). Штатная система ориентации любого летательного аппарата (ЛА) включает высокоточные чувствительные элементы-гироскопы и акселерометры, обеспечивающие решение различных задач, -определение координат мест положения объекта, определение параметров для его ориентации, стабилизации и прочее.
Современные навигационные системы, как правило, объединяют в себе ряд навигационных приборов, работающих на разных физических принципах. Это могут быть и приборы для определения высотно-скоростных параметров полёта, углов атаки, скольжения, тангажа и крена, выдающие информацию об ориентации летательного аппарата относительно вертикали на один из важнейших авиационных приборов – авиагоризонт, и приборы и системы для определения угловых скоростей и ускорений ЛА.
Прогресс в области беспилотных летательных аппаратов и сверхлегких летательных аппаратов в основном обусловлен следующими факторами:
-
- развитием новых серийно пригодных технологий для формообразования основных элементов планера – крыла и фюзеляжа;
-
- появлением системы глобальной навигации GPS и широким распространением малогабаритных приемоиндикаторов GPS;
-
- микроминиатюризацией элементов вычислительной техники – процессоров и памяти.
Управление ЛА заключается в управлении положением центра масс платформы (траекторное управление) и в управлении ориентацией платформы относительно центра масс.
Траекторное управление осуществляется на основании измерений текущих координат платформы. Для управления ориентацией ЛА используют измерения углов ориентации – курса, тангажа, крена либо измерения угловых скоростей ЛА (без вычисления углов ориентации). Для измерения углов ориентации ЛА обычно используют позиционные гироскопы. Коррекцию уходов позиционных гироскопов проводят, опираясь на данные маятника (акселирометров) и магнитных датчиков. Другим способом получения углов ориентации является использование бесплатфор-менных инерциальных навигационных систем (БИНС) на основе гироскопических датчиков угловой скорости и акселерометров. Из-за высокой стоимости БИНС не получили распространения в БЛА и СЛА.
В настоящее время уровень микроминиатюризации бортового оборудования ограничивается габаритами и массой позиционных гироскопов для хранения местной вертикали, относительно которой отсчитываются крен и тангаж. Самая лёгкая гировертикаль МГВ-6 представляет собой цилиндр 090 ⋅ 150 массой 1,0 кг. Дальнейшее уменьшение массы гировертикали практически не возможно из-за сопутствующего гироскопического момента. В то же время общая масса всей авионики может быть на порядок меньше 0,1 кг. Аналогичное соотношение стоимостей: гировертикаль стоит не менее 5000$, в то время как приемник GPS не более 100 $, а твёрдотельный инерциальный датчик 60-70$.
Постановка задачи. В настоящей работе поставлена цель разработать систему (устройство) пространственной ориентации для БЛА и СЛА на основе современных миниатюрных твердотельных инерциальных датчиков, лишенных недостатков, присущих традиционным ИНС, и которые смогут стать основным прибором пилотажной навигации для БЛА и СЛА [1].
Разработка и создание опытного образца. Основным объектом исследования в данной статье является разработанное нами устройство, которое позволяет:
-
- определять угловое положение объекта с точностью не более ± 2,0 0 по каналам крена, тангажа, курса;
-
- определять географическое положение ЛА по результатам измерений спутниковой радионавигационной системой с точностью 10 м;
-
- определять географическое положение ЛА в период между обновлениями данных от спутниковой радионавигационной системы с точностью 100 метров в минуту полета в условиях отсутствия данных от GPS.
Разработанное устройство состоит из блоков: инерциально-измерительный блок (ИИБ); трехкомпонентный магнетометр; приемник GPS, вычислитель и источник питания.
Инерциально-измерительный блок:
-
- диапазон измеряемых угловых скоростей от - 150 0/с до +150 0/с;
-
- диапазон измеряемых линейных ускорений по трем осям от – 2 g до + 2 g;
-
- напряжение питания – 5 В ± 10 %;
-
- ток потребления – 50 мА;
-
- эксплуатационный диапазон температур – 40 0/С до + 50 0/С.
Магнитометр:
-
- информация, получаемая от магнитометра должна обеспечивать ориен
тирование по сторонам света без использования информации от GPS ;
-
- питание блока – 5 В ± 10 %;
-
- номинальный ток потребления – 50мА;
-
- эксплуатационный диапазон температур – 40 0С до + 500 С.
Приемник GPS:
-
- прием текущего значения широты;
-
- прием текущего значения долготы;
-
- прием текущего значения истинного курса;
-
- прием текущего значения высоты полета;
-
- прием текущего значения истинной скорости;
-
- прием текущего значения времени.
Вычислительное устройство:
-
- аналого-цифровое преобразование сигналов от датчиков ИИБ и трех-компанентного магнитометра;
-
- прием и обработку сигналов GPS по протоколу NMEA;
-
- расчет углов крена, тангажа по информации от ИИБ;
-
- расчет магнитного курса;
-
- реализацию алгоритмов инерциальной навигации с коррекцией по показаниям спутниковой радионавигационной системы (СРНС).
С появлением на рынке новых миниатюрных чувствительных элементов во всем мире (по оценкам зарубежных аналитиков, в настоящее время 32 страны мира занимаются или выпускают БЛА) начались попытки создания на их основе дешевых приборов ИНС. В настоящее время в области компактных механических инерциальных датчиков доминирует технология MEMS (Micro – Electro Mexanical System), которая подразумевает изготовление на кристалле кремния микроскопических подвижных элементов и при совмещении с микроэлектронными технологиями позволяет создавать очень компактные, надежные и простые в эксплуатации датчики и не просто датчики, а «системы на кристалле» высокой степени интеграции [2].
В качестве датчиков для построения ИИБ были выбраны микромеханические датчики фирмы Analog Devices ADXR 150 и ADXL 103. На рис.1 представлена функциональная схема датчика ADXR 150. Основные характеристики датчиков приведены в таблице.
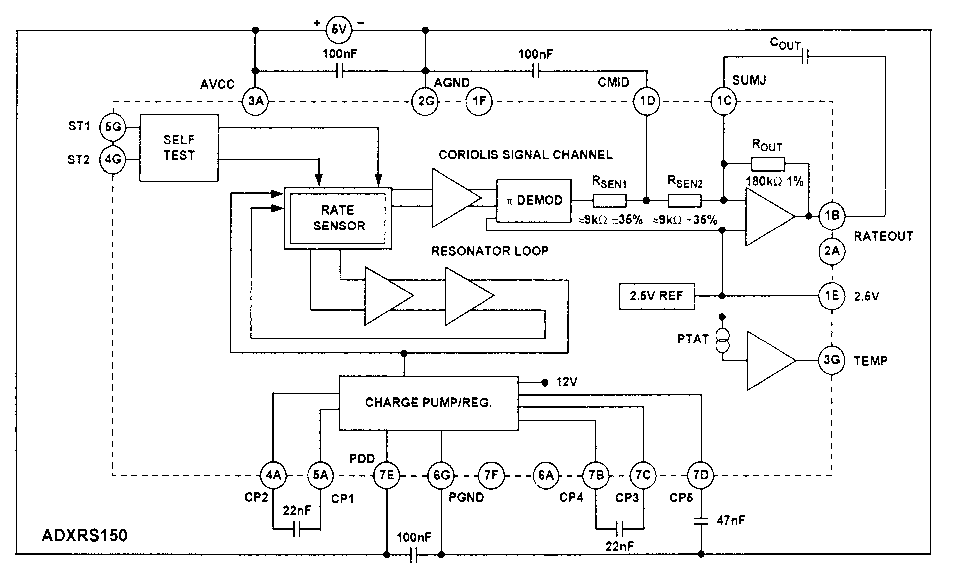
Рис. 1 Функциональная схема ADXR 150
Технические и точностные характеристики датчиков
|
Параметр |
ADXRS 150 |
AXDL 103 |
|
Электропитание, В |
5 |
5 |
|
Рабочий диапазон температур |
-400 - +850 |
-400 - +1250 |
|
Скорость дрейфа, 0/с/Гц |
0,05 |
- |
|
Предел измерений |
± 150 % |
± 1,7 g |
|
Чувствительность |
12,5 mB/0/с |
1 mg (на 60 Гц) |
|
Частотный диапазон, Гц |
40 |
10 |
|
Смещение нуля |
- |
± 25 mg |
|
Смещение нуля от температуры |
0,384 0/с/0С |
± 0,1 mg/0С |
|
Линейность в диапазоне, % |
0,1 |
± 0,5 |
|
Уровень помех |
0,05 0/с/Гц |
110 µg/Гц |
|
Температурная чувствительность |
- |
± 0,5 % |
|
Чувствительность к ускорению |
0,2 0/с/g |
- |
В качестве основного источника информации используется ИИБ, состоящий из трех взаимно перпендикулярных установленных акселерометров и гироскопов. Магнитометр 3-осевой представлен магниторезистивными датчиками фирм HONEY WELL или PHILIPS. Источником дополнительной информации служит приемник спутниковой радионавигационной системы (СРНС) GM-210, фирмы Holux. Приемник выдает стандартный набор навигационной информации в соответствии с протоколом NMEA-0183, с частотой 1 Гц.
Алгоритм работы разработанного устройства представлен на рис.2. Вычислительное устройство реализовано с помощью процессорного модуля на основе сигнального процессора TMS320F2812.
▼
Начальные настройки
Получение значений угловых скоростей и ускорений с учетом температурного дрейфа датчиков
Фильтрация данных
Формируем признак наличия / отсутствия ускорения в текущий момент
Формируем признак превышения значения текущей угловой скорости пороговой величиныугловой скорости при которой допускается приведение вертикали
Ускорение отсутствует и текущая скорость не превышает пороговой величины
Нет
Да
Вычисляются приведенные углы крена и тангажа по показаниям акселерометров
Дополнительные угловые скорости списывания разностей для углов крена и тангажа принимаются ра вными нулю
Вычисляются разности между текущими и приведенными углами крена и тангажа
Вычисляются дополнительные угловые скорости списывания полученных разностей для углов крена и тангажа
Есть информация от GPS
Нет
Вычисляется разность между текущим курсом и курсом от GPS
Дополнительная угловая скорость списывания разности для угла курса принимается равной нулю
Вычисляется дополнительная угловая скорость списывания полученной разности для угла курса
I
По текукщим и дополнительным угловым скоростям вычисляются новые значения крена, курса и тангажа
Рис. 2 Алгоритм работы разработанного устройства
Полученные результаты. Опытный образец испытывался в лабораторных условиях, Уфимского приборного завода на серийном испытательном стенде МПУ–1 АП–34Б (зав. № 4140). Получены следующие результаты:
-
- стабильность нуля не более - 10 % ;
-
- случайное блуждание нуля – 0,15 0 r ;
-
- нестабильность масштабного коэффициента – 0,1 % ;
-
- полоса пропускания – 40 Гц.
Выводы. Проведённые испытания подтверждают:
-
- возможность применения микромеханических датчиков (МЕМS) при построении ИНС для беспилотных и сверхлёгких летательных аппаратов;
-
- применение микромеханических датчиков с использованием специальных методов обработки информации, которые позволяют обеспечивать точность, существенно превосходящую точность отдельного прибора;
-
- возможность создания недорогой ИНС на основе современных твердотельных инерциальных датчиков, лишенной существующих недостатков для БЛА и СЛА;
-
- возможность применения разработанной ИНС для микроспутников типа «Nana», доукомплектовав ее блоком термочувствительных элементов термодинамической системы ориентации и стабилизации [3]; точность определения углового положения микроспутников этого типа ± 50 по каналам крена, тангажа, курса.
Список литературы Архитектура и возможности системы пространственной ориентации беспилотных и сверхлегких летательных аппаратов на чувствительных элементах нового поколения
- Савенко Н. Акселерометры и гироскопы для портативых устройств/Н. Савенко//Современная электроника. -2006. -№ 6. -С.18-21.
- Дудник В.В. Разработка и создание опытного образца твердотельного авиагоризонта для сверхлегких летательных аппаратов на чувствительных элементах нового поколения: отчет о НИР. -№0120610360 ФНТИЦ/В.В. Дудник, Ю.А. Батищев, Д.М. Кузнецов и др. 2007. -98 с.
- Костенко В.И. Особенности применения термопреобразователей сопротивления в системах ориентации и энергообеспечения космических аппаратов./В.И. Костенко, М.Б. Добриян, А.В. Наганов, О.Т. Захарчук.//Современные проблемы определения ориентации и навигации космических аппаратов. Сер. Механика и информатика: сб. тр. Всерос. науч.-техн. конф. Россия, Таруса: ИКИ РАН; опубл. 24-25 сентября 2008 года. -С.231-236.
