Архитектура нейронных сетей, основанных на физических характеристиках объекта

Автор: Кузнецов А.А.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Новые информационные технологии
Статья в выпуске: 4 т.20, 2022 года.
Бесплатный доступ
Нейронные сети, основанные на физических характеристиках объекта, активно применяются в последнее время для решения сложных задач, требующих сложных вычислений. Поэтому важно знать и уметь применять данную технологию. Нейронные сети решают множество задач в разных областях науки. К настоящему времени существуют разные способы применения, одно из возможных применений решение уравнения частных производных, более частный случай - аппроксимация кусочно-функциональных систем. В статье представлен обзор архитектуры нейронных сетей, основанных на физических характеристиках объекта. Рассмотрено применение физических информированных нейронных сетей (PINNs) для аппроксимации кусочно-функциональных систем. Показано, что PINNs позволяют использовать информацию о физических уравнениях системы при обучении, автоматически определять границы между областями значений входных переменных и использовать различные функции активации и скрытые слои.
Нейронные сети, основанные на физических характеристиках объекта, анализ
Короткий адрес: https://sciup.org/140301272
IDR: 140301272 | УДК: 004855.2 | DOI: 10.18469/ikt.2022.20.4.08
Architectures of neural networks based on the physical characteristics of the object
Neural networks based on the physical characteristics of an object have been actively used in recent time in order to solve combined problems that require multi-step calculations. Therefore this technology shall be thoroughly studied and properly used. Neural networks solve many problems in different fields of science. Today there are several different ways of application, one of the possible applications is the solution of the equation of partial variables, in special cases the approximation of piecewise functional systems can be used. This article presents an overview of neural network architecture based on physical characteristics of the object. The application of physical informative neural networks (PINNs) for approximation of piecewise functional systems is considered. It is shown that PINNs allow to use information about the physical equations of the system in training, automatically determine boundaries between ranges of input variables, and use various activation functions and hidden layers.
Текст научной статьи Архитектура нейронных сетей, основанных на физических характеристиках объекта
Физически-информированные нейронные сети (PINN) – это тип универсальных аппроксиматоров функций, которые могут включать в процесс обучения знание любых физических законов, управляющих данным набором данных, и могут быть описаны частичными дифференциальными уравнениями (ЧДУ). Они позволяют преодолеть проблему низкой доступности данных для некоторых биологических и инженерных систем, из-за которой большинство современных методов машинного обучения не обладают достаточной устойчивостью, что делает их неэффективными в этих сценариях. Одной из основных проблем в традиционных численных методах является необходимость большого количества точных и достаточно подробных данных для построения модели. В случае отсутствия или недостатка данных, модель может давать неверные результаты. PINNs предлагают решение этой проблемы, используя физические законы, которые могут быть встроены в нейронные сети в качестве дополнительных условий, которые должны выполняться. Это позволяет использовать ограниченное ко- личество данных для получения точных результатов моделирования. Вместо того чтобы полагаться на большое количество точных данных для обучения сети, PINNs обучают нейронную сеть на основе разреженных и неточных данных и физических законов. Предварительное знание общих физических законов действует в процессе обучения нейронных сетей (NNs) как регулятор, который ограничивает пространство допустимых решений, повышая корректность аппроксимации функции. Таким образом, встраивание этой предварительной информации в нейронную сеть приводит к повышению информативности имеющихся данных, облегчая алгоритм обучения поиску правильного решения и хорошее обобщение даже при малом количестве обучающих примеров. Таким образом, метод PINNs может использоваться для решения сложных задач, таких как прогнозирование погоды, проектирование и анализ инженерных систем, моделирование биологических процессов и т.д.
Преимущества и недостатки PINNs
Преимущества:
-
1. PINNs могут быть использованы для реше-
- ния различных задач физики и инженерии, включая гидродинамику, механику, электродинамику и многие другие области.
-
2. Использование PINNs позволяет решать задачи, для которых традиционные методы численного анализа могут быть сложными или неэффективными.
-
3. PINNs могут быть эффективными для решения проблем, связанных с неоднородными или нелинейными материалами, или структурами.
-
4. PINNs могут быть использованы для обработки данных экспериментов, которые содержат ошибки или шум, и для извлечения значимых закономерностей из таких данных.
Недостатки:
-
1. PINNs требуют большого количества данных для обучения, что может быть трудно, если данные являются дорогостоящими для сбора или ограничены.
-
2. Обучение PINNs может быть сложным и требовать значительных вычислительных ресурсов, так как они объединяют в себе искусственный интеллект и физические уравнения.
-
3. PINNs могут быть чувствительны к выбору параметров, таких как скорость обучения, размер сети и другие параметры, и требуют тщательной настройки.
-
4. PINNs могут давать неточные результаты, если используемые физические уравнения недостаточно точны или аппроксимативны.
Функции аппроксимации
Большинство физических законов, которые управляют динамикой системы, могут быть описаны дифференциальными уравнениями в частных производных. Например, уравнения Навье-Сток-са [1] – это набор дифференциальных уравнений, вытекающих из законов сохранения (т.е. сохранения массы, импульса и энергии), которые управляют механикой жидкости. Решение уравнений Навье-Стокса с соответствующими начальными и граничными условиями позволяет количественно оценить динамику потока в точно определенной геометрии. Однако эти уравнения невозможно решить точно, поэтому необходимо использовать численные методы (такие как конечные разности, конечные элементы и конечные объемы). В такой постановке эти управляющие уравнения должны решаться с учетом предварительных допущений, линеаризации и адекватной дискретизации во времени и пространстве. В последнее время решение управляющих дифференциальных уравнений физических явлений с помощью глубокого обучения стало новой областью научного машинного обуче- ния, использующей универсальную аппроксимацию [2] и высокую выразительность нейронных сетей. В целом, глубокие нейронные сети могут аппроксимировать любую функцию при наличии достаточного количества обучающих данных [3]. Однако такие сети не учитывают физические характеристики, лежащие в основе проблемы, и уровень точности аппроксимации, обеспечиваемый ими, по-прежнему сильно зависит от тщательной спецификации геометрии задачи, а также начальных и граничных условий. Без этой предварительной информации решение не является уникальным и может потерять физическую корректность. С другой стороны, нейронные сети с физической информацией (PINN) используют физические уравнения для обучения нейронной сети. А именно, PINN разрабатываются для обучения таким образом, чтобы удовлетворять заданным обучающим данным, а также наложенным управляющим уравнениям. Таким образом, нейронная сеть может управляться с помощью обучающих данных, которые не обязательно должны быть большими и полными [4]. Потенциально, точное решение дифференциальных уравнений может быть найдено без знания граничных условий [5]. Поэтому, имея некоторые знания о физических характеристиках задачи и некоторую форму обучающих данных (даже редких и неполных), PINN может быть использована для поиска оптимального решения с высокой точностью. PINN позволяют решать широкий спектр проблем в вычислительной науке и представляют собой новаторскую технологию, ведущую к разработке новых классов численных решателей для PDE. PINN можно рассматривать как альтернативу традиционным подходам (например, вычислительная гидродинамика), и новые подходы на основе данных для инверсии моделей и идентификации систем [6]. Примечательно, что обученная сеть PINN может использоваться для прогнозирования значений на симуляционных сетках разного разрешения без необходимости повторного обучения [7]. Кроме того, они позволяют использовать автоматическое дифференцирование (AD) [8] для вычисления необходимых производных в дифференциальных уравнениях – новый класс методов дифференцирования, широко используемых для вывода нейронных сетей, которые, по оценкам, превосходят численное или символьное дифференцирование.
Аппроксимация кусочно-функциональных систем с помощью PINNs
Кусочно-функциональная система (PiecewiseFunction System) – это система, которая может быть описана набором функциональных зависимостей, каждая из которых действительна только в определенном диапазоне значений входных переменных. Примером может служить система управления, которая может использовать различные управляющие законы в зависимости от текущего состояния системы. Для аппроксимации кусочно-функциональных систем с помощью PINNs необходимо определить функцию, которая соответствует каждой из областей значений входных переменных [9]. Для этого может быть использована стандартная архитектура нейронной сети, состоящая из нескольких скрытых слоев, которые могут быть соединены с помощью функций активации, таких как гиперболический тангенс. Для обучения PINNs используется комбинация функции потерь, связанной с соответствием модели исходным данным, и функции потерь, связанной с соответствием модели физическим уравнениям системы [10]. Функция потерь, связанная с соответствием модели исходным данным, может быть выбрана в соответствии с постановкой задачи, например, в случае задачи регрессии это может быть среднеквадратичная ошибка между предсказанными и истинными значениями. Функция потерь, связанная с соответствием модели физическим уравнениям системы, может быть задана с использованием дифференциальных уравнений, которые описывают физические законы системы. Для кусочно-функциональных систем это может быть задано следующим образом:
L physics
Z n e x rf \ du ^
F\ x,u(x),— i—1J x- V dx)
dx .
Идея заключается в том, чтобы минимизировать функцию потерь, связанную с соответствием модели физическим уравнениям системы, используя градиентный спуск. При этом, при обучении PINNs не требуется явно задавать границы между областями значений входных переменных – нейронная сеть сама определит эти границы в процессе обучения.
Пример аппроксимации
Для создания графика и данных нам необходимо выбрать конкретную функцию u ( x ) и правую часть дифференциального уравнения
„ f du F I X, U,----
V dx
Для примера мы выберем следующую кусоч- но-функциональную систему:
, , [0.5x + 0.2, 0 < x < 5 f (x) =
[ 2 - 0.2 x , 5 < x < 10 .
И правую часть дифференциального уравнения:
„ f du ^ d 2 u du 2
f I x, u,— I — —2“ +2 u .
V dx ) dx 2 dx
Мы будем искать аппроксимацию . функции u ( x ) на отрезке [ 0,10 ] . Результатом будет график (рисунок 1), на котором сплошной линией показана реальная функция u ( x ) , а прерывистой – аппроксимация, полученная с помощью PINNs.
На графике видно, что аппроксимация, полученная с помощью PINNs, достаточно точно приближает реальную функцию u ( x ) на всем отрезке [ 0,10 ] . Однако, в точках разрыва производной аппроксимация имеет небольшие отклонения, так как в этом месте полученные результаты не являются полностью идентичными реальным значениям.
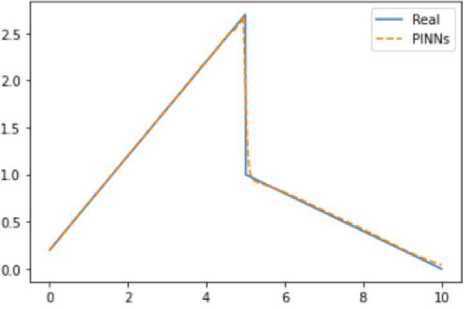
Рисунок 1. Результат аппроксимации
Также можно оценить ошибку аппроксимации на всем отрезке [ 0,10 ] . Результатом будет значение относительной ошибки аппроксимации. В данном случае значение ошибки составляет 0,0261, что говорит о достаточно хорошем качестве аппроксимации. В целом, результаты аппроксимации PINNs могут сильно варьироваться в зависимости от выбранной функции u ( x ) и дифференциального уравнения
f du
F I x, u,---
V dx а также от выбранной архитектуры и параметров модели. Однако, метод PINNs является достаточно гибким и может быть применен для аппроксимации широкого класса функций и дифференциальных уравнений.
Заключение
В этой статье мы рассмотрели использование физически информированных нейронных сетей
(PINNs) для аппроксимации кусочно-функциональных систем. Показали, что PINNs позволяют использовать информацию о физических уравнениях системы при обучении, автоматически определять границы между областями значений входных переменных и использовать различные функции активации и скрытые слои.
Список литературы Архитектура нейронных сетей, основанных на физических характеристиках объекта
- Raissi M., Perdikaris P., Karniadakis G.E. Physics Informed Deep Learning (Part I): Data-driven Solutions of Nonlinear Partial Differential Equations. URL: https://arxiv.org/pdf/1711.10561.pdf (дата обращения: 08.03.2023).
- Hinton G.E., Sejnowski T.J. Learning and relearning in Boltzmann machines // Parallel Distributed Processing: Explorations in the Microstructure of Cognition. 1986. P. 282-317.
- Rosenblatt F. The perceptron: A probabilistic model for information storage and organization in the brain // Psychological Review. 1958. Vol. 65, no. 5. P. 386-408.
- Bourlard H., Kamp Y. Auto-association by multilayer perceptrons and singular value decomposition // Biological Cybernetics. 1988. no. 59. P. 291-294. EDN: HZQZPD
- Raissi M., Perdikaris P., Karniadakis G.E. Physics Informed Deep Learning (Part I): Data-driven Solutions of Nonlinear Partial Differential Equations. URL: https://arxiv.org/pdf/1711.10561.pdf (дата обращения: 08.03.2023).
- Deep convolutional inverse graphics network / T.D. Kulkarni [et al.] // Advances in Neural Information Processing Systems. 2015. P. 1-10. URL: https://arxiv.org/pdf/1503.03167v4.pdf (дата обращения: 08.03.2023).
- Physics-Informed Deep-Learning for Scientific Computing / S. Markidis [et al.] // Journal of Computational Physics. 2021. P. 1-10. URL: https://arxiv.org/pdf/2103.09655.pdf (дата обращения: 08.03.2023).
- Graves A., Wayne G., Danihelka I. Neural turing machines. URL: https:// arxiv.org/pdf/1410.5401v2.pdf (дата обращения: 08.03.2023).
- Elman J.L. Finding structure in time // Cognitive Science. 1990. no. 14. P. 179-211.
- Gradient-based learning applied to document recognition / Y. LeCun [et al.] // Proceedings of the IEEE. 1998. no. 86. P. 2278-2324.
