Архитектура распределенной системы цифровой обработки радиолокационных данных

Автор: Шульженко Анастасия Дмитриевна
Рубрика: Информатика и вычислительная техника
Статья в выпуске: 4, 2021 года.
Бесплатный доступ
Статья посвящена разработке предложения по архитектуре системы цифровой обработки радиолокационных данных на отечественной элементной базе. Исследование инициировано изучением функционирования интегральных схем на базе процессоров «Мультикор». Рассмотрена структура входного потока данных радиолокационного наблюдения Земли и алгоритм их обработки. Построена схема распределенной обработки данных с использованием параллельного вычислителя. Предложена схема системы цифровой обработки данных с использованием двухуровневой архитектуры, ее изменение в виде оптимизации для использования быстрого преобразования Фурье по основанию 4. Показаны два варианта реализации, приведена оценка вычислительной эффективности указанного перехода. Практическая значимость исследования заключается в явном предложении структуры решающего устройства, обладающего более высокой вычислительной эффективностью по сравнению с аналогичным, использующим быстрое преобразование Фурье по основанию 2, а также в разработке схемы включения таких решающий (вычислительных) узлов в вычислительный кластер. Показано место управляющего модуля, формирующего динамический план задействования ресурсов. Данный материал будет интересен радиолюбителям, а также обучающимся и работающим в области обработки данных радиолокационного наблюдения.
Цифровая обработка радиолокационных данных, синтез радиолокационного изображения, распределенные вычисления, быстрое преобразование фурье, векторно-конвейерная обработка
Короткий адрес: https://sciup.org/148323532
IDR: 148323532 | УДК: 004.31 | DOI: 10.18137/RNU.V9187.21.04.P.196
The architecture of a promising distributed system for digital processing of radar data
The article is devoted to the development of a proposal for the architecture of a system for digital processing of radar data on a domestic element base. The research was initiated by the study of the functioning of integrated circuits based on processors “Multicore”. In the proposed material, the structure of the input stream of Earth radar observation data and the algorithm for their processing are considered. The scheme of distributed data processing using a parallel computer is built. A scheme of a digital data processing system using a two-tier architecture is proposed. A change in the scheme in the form of optimization for the use of the fast Fourier transform in base 4 is proposed. Two variants of implementation are shown, and an estimate of the computational efficiency of this transition is given. The practical significance of the research presented in the article lies in explicitly proposing the structure of a solver that has a higher computational efficiency compared to a similar one that uses the fast Fourier transform in base 2, as well as in the development of a scheme for including such decisive (computational) nodes in a computational cluster. The place of the control module, which forms a dynamic plan for the use of resources, is shown. This material will be of interest to radio amateurs, as well as to students and workers in the field of radar surveillance data processing.
Текст научной статьи Архитектура распределенной системы цифровой обработки радиолокационных данных
Данные радиолокационного наблюдения земной поверхности, бесспорно, играют важную роль в современной жизни. Однако оперативность получения информации имеющимися средствами с учетом перспективного многократного роста интенсивности потока данных неудовлетворительна. Это обусловливает актуальность проведения исследований в данной области.
Целью настоящей работы является анализ системы распределённой обработки радиолокационных данных в наземном специальном комплексе космической системы и разработка предложения, позволяющего организовать потоковую обработку радиолокационных данных. Достижение поставленной цели возможно за счёт применения специфичных аппаратных элементов и разработки оптимальных алгоритмов, учитывающих их особенности.
Cтруктура входного потока данных на пунктах приема информации.
Cхема вычислительного процесса первичной обработки
Структура принимаемых данных показана на Рисунке 1.
Входные данные для обработки в системе (на выходе аналогово-цифрового преобразователя) представляет собой поток отсчетов сигнала в виде байтов.

Рисунок 1. Структура радиолокационных данных
Первые его значения характеризуют работу бортовой аппаратуры, траекторные параметры космического аппарата (локатора), параметры зондирующего сигнала и др. [4]. Эта информация является служебной и имеет установленную длину (Mбайт). На ее основе строятся опорные функции по дальности и азимуту для проведения первичной обработки данных. Затем передается непосредственно запись принятого локатором эхосигна-ла в виде амплитудной и фазовой составляющих [5].
Схема вычислений приведенного стандартного алгоритма показана на Рисунке 2.
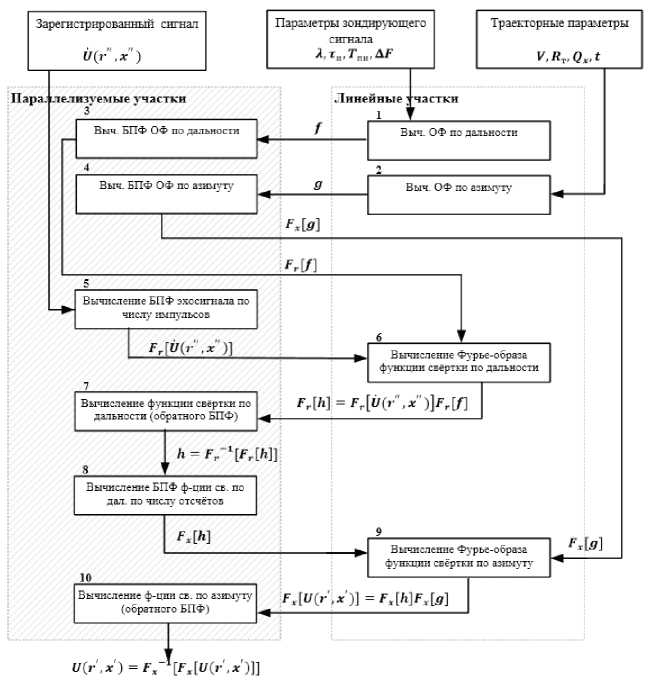
Рисунок 2. Схема первичной обработки данных радиолокационного наблюдения: U J ( r ", x ") -зарегистрированный сигнал; X - длина волны; т и - длительность импульса; Тпи - частота повторения импульсов; A F - изменение частоты; V - скорость носителя; R m - дальность по траверсу; Qx – азимутальная дальность; t – время съёмки; f – опорная функция по дальности; g – опорная функция по азимуту; F – быстрое преобразование Фурье; h – функция свертки по дальности; F -1 – обратное быстрое преобразование Фурье; U ( r ′ , x ′ ) – радиолокационное изображение
Отсчеты зарегистрированного сигнала передаются в систему обработки в виде потока комплексных чисел (действительной и мнимой частей), после чего производятся вычисления по стандартному алгоритму, в общем виде соответствующему:
Архитектура распределенной системы цифровой обработки радиолокационных данных
-
1) вычислению спектров опорных функций;
-
2) вычислению спектра сигнала;
-
3) выполнению перемножения спектра зарегистрированного сигнала со спектром опорной функции по дальности;
-
4) выполнению перемножения спектра зарегистрированного сигнала со спектром опорной функции по азимуту.
Дополнительными действиями в этом алгоритме могут быть коррекции (например, миграции траекторного сигнала в каналах дальности), обоснованные наличием искажений из-за физики распространения радиолокационных сигналов [6]. В рамках данной статьи не рассматриваются.
При первичной обработке данных радиолокационного зондирования выделяются па-раллелизуемые участки [7]. Функция, выполняемая на них, – быстрое преобразование Фурье (далее – БПФ) над комплексными числами. Рассмотрим подробнее это математическое преобразование.
Математически основной операцией классического БПФ по основанию 2, применяемого при цифровой обработке сигналов, является «бабочка»:
A = X + toY
B = X - toY где A, B, X, Y, ω – комплексные числа.
Система (1) может быть представлена для наглядности в виде
A
B
re
re
A m
B m
Xre +(Yretore -Ymtom ) Xim +(Yretoim + Yimtore )
X re -( Yre to re
-
Ymtom ) Xre —(Yretom + Yimtoe ) .
Вычисления комплексных чисел можно представить в виде схемы, изображенной на
Рисунке 3.
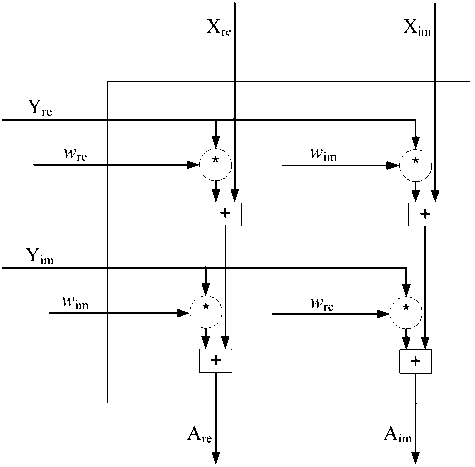
Рисунок 3. Схема вычислений «бабочки» Фурье по основанию 2 для комплексных чисел
В результате анализа приведенных схем появляются предположения о структуре арифметического устройства, оптимизированного для выполнения конкретного алгоритма [8]. Он должен обладать некоторыми особенностями, например:
-
– «бабочка» Фурье выполняется арифметическим устройством (ядром) за один такт; также в этом такте производится чтение исходных данных и запись результата;
-
• имеется N вычислительных узлов с собственной памятью у каждого;
-
• входной поток распределяется по банкам памяти;
-
• организуется конвейерная обработка данных;
-
• может применяться одна команда для обработки нескольких потоков данных;
-
• пересылка данных между вычислительными узлами не занимает дополнительный такт;
-
• имеется возможность независимой обработки разнородных потоков информации (разными командами);
-
• имеются внешние интерфейсы ввода данных у каждого вычислительного узла.
Аналогично производятся вычисления для комплексного числа B.
Дополнительно стоит указать, что одной из целей разработки нового комплекса обработки радиолокационных данных [9] является обработка в режиме реального времени. Для этого должны быть учтены как минимум еще две особенности:
-
• пропускная способность интерфейса ввода-вывода соответствует интенсивности входного потока;
-
• производительность вычислительного устройства должна быть опережающей (это означает, что в процессе обработки должна компенсироваться первоначальная задержка на запись в память данных, и процессор должен переходить в режим ожидания поступления новых данных, что и будет соответствовать обработке в реальном времени).
Архитектура перспективной системы цифровой обработки данных
Согласно указанным особенностям разработана схема, отражающая основные элементы архитектуры вычислительного устройства, предназначенного для распределённой первичной обработки данных радиолокационного наблюдения на пунктах приёма и обработки информации (см. Рисунок 4).
При такой организации реализуется двухуровневый принцип построения вычислительной системы (в данном применении – системы распределенной цифровой обработки сигналов) [1]. На первом уровне происходит формирование плана использования и динамическое управление вычислительными ресурсами [10]; на втором уровне – обработка данных радиолокационного наблюдения с учетом дисциплины распределенной обработки. При этом обработка на втором уровне выполняется распределенно – поток входных данных распределяется между процессором общего назначения и сопроцессорами (то есть сложным параллельным вычислителем, представляющим собой совокупность взаимодействующих вычислительных кластеров) [11].
Важной особенностью предлагаемой схемы является возможность реализации обработки разнородных потоков данных параллельно. Это является актуальным в условиях необходимости разработки унифицированного комплекса обработки данных гетерогенных многоспутниковых систем наблюдения земной поверхности [12].
Архитектура распределенной системы цифровой обработки радиолокационных данных
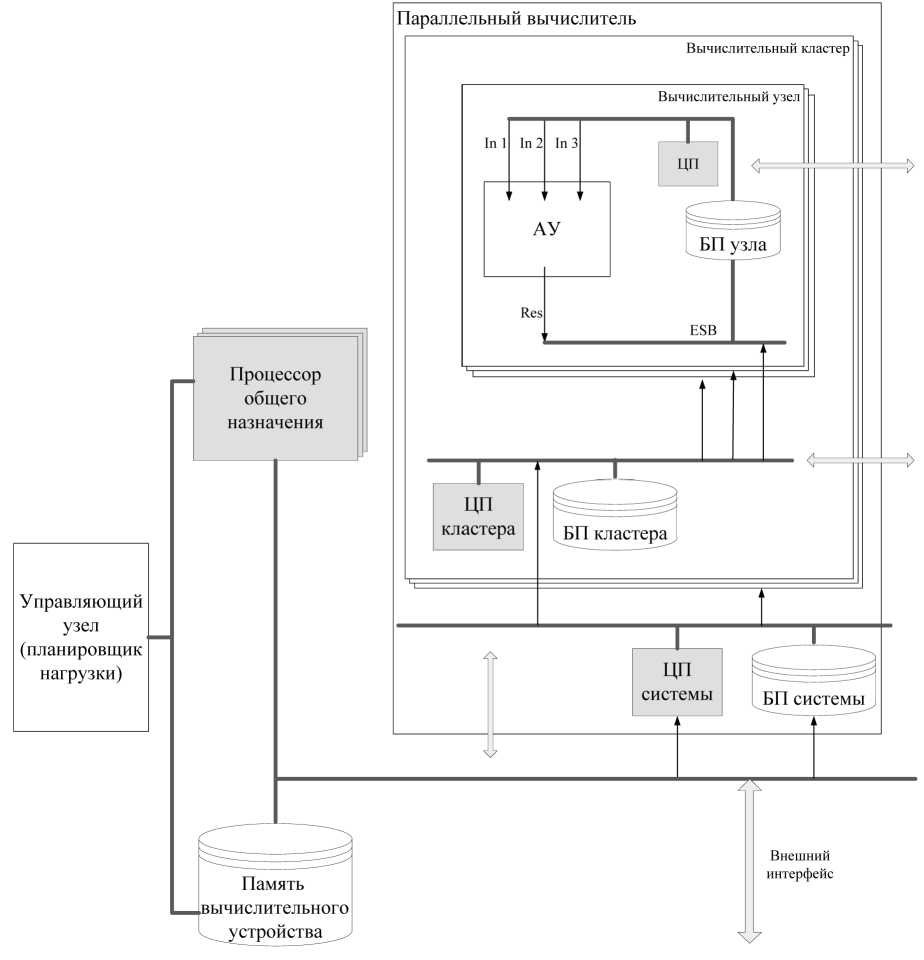
Рисунок 4. Схема перспективной системы цифровой обработки данных: АУ – арифметическое устройство; ЦП – центральный процессор; БП – банк памяти; ESB – шина
Основным направлением совершенствования предложенной архитектуры является переход от БПФ по основанию 2 к более эффективному со стороны математической теории БПФ по основанию 4 [2; 3]. Эта эффективность обусловливается количеством требуемых базовых операций для обработки последовательности.
При длине последовательности N отсчетов для выполнения БПФ по основанию 2 тре-
N буется log2 N операций умножения и N log2 N операций сложения. Для выполнения
БПФ по основанию 4 при той же длине последовательности требуется 3N3N log N= log N операций умножения и Nlog N операций сложения. 48
3 N
Таким образом, общее число операций для БПФ по основанию 2 составляет log2 N ,
11N а для БПФ по основанию 4 – log2 N . Простой операцией отношения выясняем, что это в ≈1,1 раза менее трудоемко. 8
Предполагается повысить эффективность применения БПФ по основанию 4 путем изменения самого процесса вычислений, то есть изменением структуры арифметического устройства. Рассмотрим на схемах (Рисунки 5, 6).
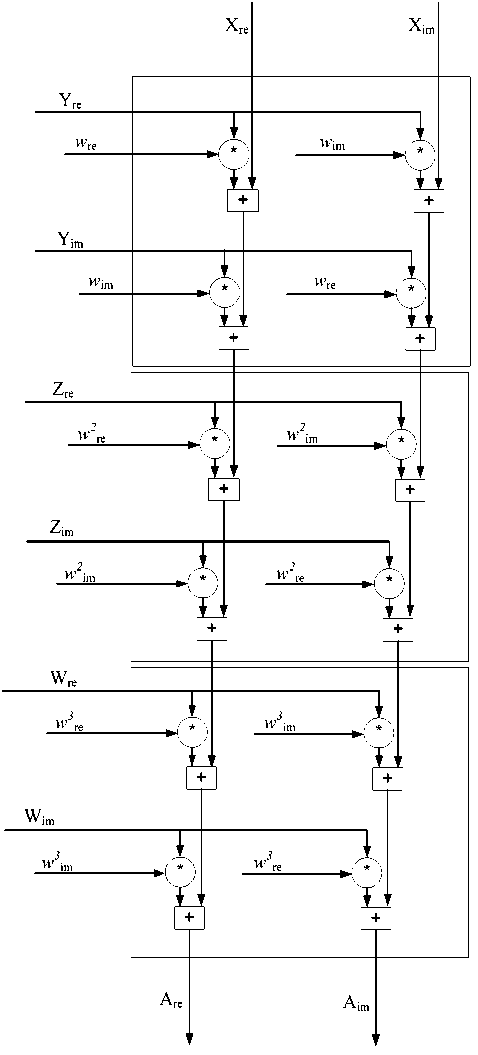
Рисунок 5. Схема последовательного вычисления «бабочки» Фурье по основанию 4 для комплексных чисел
Архитектура распределенной системы цифровой обработки радиолокационных данных
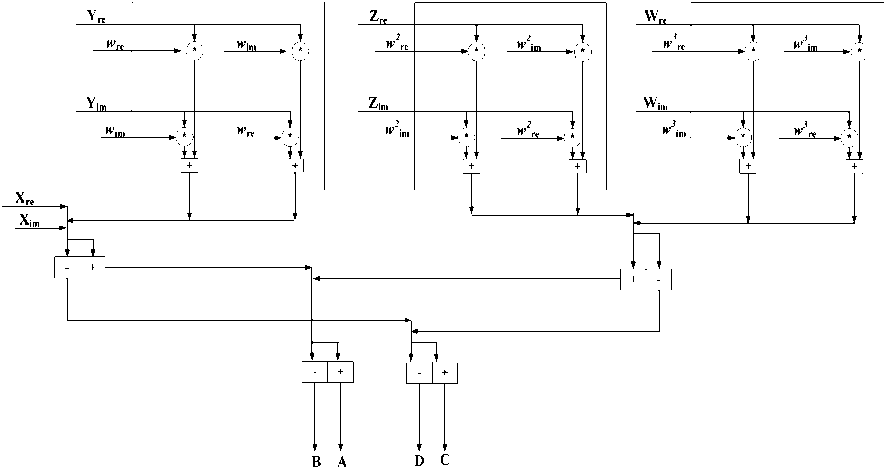
Рисунок 6. Схема оптимизированного вычисления «бабочки» Фурье по основанию 4 для комплексных чисел
Основной операцией БПФ по основанию 4 является вычисление системы (3). Математическое представление «бабочки» имеет вид
A = X + YY + to 2 Z + to 3 W , B = X + i to Y - to 2 Z - i to3 W , C = X - toY + to 2 Z - to 3 W , D = X - i to Y - to 2 Z + i to 3 W, где A , B , C , D , X , Y , Z, W , ω – комплексные числа.
С использованием арифметического устройства, построенного по схеме 5, вычисление каждого выражения производится за три такта, как показано на Рисунке 5. Таким образом, для обработки четырех чисел требуется двенадцать тактов. При этом для обработки четырех чисел БПФ по основанию 2 потребуется всего 4 такта. Это означает, что данная архитектура не подходит для измененного основания и требует пересмотра [13].
Если рассмотреть систему в целом, то видно, что для получения всех четырех результирующих значений требуется произвести три комплексных умножения и восемь сложений. Все эти операции можно выполнить за три такта. Представим это на Рисунке 6.
На первом такте производится вычисление значений to Y , to 2 Z, to3 W . На втором такте выполняется сложение/вычитание X ± to Y , G ZZ ± to 3 W . На третьем такте выполняется сложение/вычитание результатов второго такта для получения итогового результата. Такая схема позволяет произвести обработку четырёх чисел за три такта [14].
При выполнении БПФ по основанию 2 по схеме на рисунке 5 обработка четырёх чисел занимает 4 такта. Таким образом, получаем повышение производительности обработки в
-
1,25 раза. Это соответствует предположению об эффективности применения быстрого преобразования Фурье по основанию 4.
Проведённый анализ и полученные результаты позволяют сделать вывод, что применение предложенных схем с адаптированными алгоритмами обработки данных радиолокационного наблюдения априорно позволит реализовать потоковую обработку «сырых» данных [15]. Необходимо провести работы по расчету основных технических требований системы для достижения цели и по анализу эффективности дальнейшего увеличения основания БПФ. Кроме того, открытым остается вопрос о конфигурации модулей вторичной обработки.
Заключение
В работе сформулированы предложения по архитектуре вычислительного модуля первичной обработки радиолокационных данных на основе мультиядерного решения. Также предложены схемы арифметических устройств этих ядер для выполнения математически более эффективных преобразований.
Предложена обобщённая схема системы цифровой обработки данных в целом. Указанная схема системы в перспективе может быть использована для разработки новой унифицированной системы обработки гетерогенных данных дистанционного зондирования Земли.
Направлением дальнейших исследований является определение технических характеристик перспективной системы и архитектуры вычислительных модулей вторичной обработки.
Список литературы Архитектура распределенной системы цифровой обработки радиолокационных данных
- Борисов А.А., Краснов С.А., Нечай А.А. Технология блокчейн и проблемы ее применения в различных информационных системах // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2018. № 2. С. 63–67.
- Гладышев А.И., Зимовец А.И., Нечай А.А., Обухов А.В. Применение Big Data для анализа околоземного космического пространства // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2020. № 4. С. 127–134.
- Лоскутов А.И., Дуников А.С., Артюшкин А.Б., Нечай А.А. Математическая модель системы символьной синхронизации наземной приемно-регистрирующей станции телеметрической информации в условиях флуктуаций амплитуды сигнала // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2017. № 1. С. 11–19.
- Морозов А.А., Тимофеев А.В. Эффективность параллельной реализации алгоритма Radix-4 быстрого преобразования Фурье. М.: Высшая школа экономики, 2015; 1(1): 69–82.
- Мысливец Е.Г., Пучкова И.А., Нечай А.А., Антонов Д.А. Синтез модели автоматизированной информационной системы радиоэлектронного мониторинга объектов наблюдения на основе логико-алгебраического подхода // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2020. № 4. С. 135–142.
- Нечай А.А. Формирование безопасной информационной среды // Актуальные проблемы современности: наука и общество. 2019. № 4 (25). С. 43–44.
- Нечай А.А., Борисов А.А., Борисова Ю.И. Точечный анализ данных дистанционного зондирования земли средствами языка программирования Python // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2019. № 1. С. 49–55.
- Новиков А.Н., Нечай А.А., Малахов А.В. Математическая модель обоснования вариантов реконфигурации распределенной автоматизированной контрольно-измерительной системы // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2016. № 1-2. С. 56–59.
- Новиков А.Н., Нечай А.А., Малахов А.В. О подходе к обоснованию рациональной номенклатуры эталонной базы измерительных комплексов на основе нечетких моделей // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2017. № 1. С. 72–79.
- Полончик О.Л., Артюшкин А.Б., Нечай А.А., Полончик Е.О. Радиолокационные системы дистанционного зондирования Земли на базе спутников со стабилизацией вращением // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2017. № 1. С. 35–41.
- Рабинер Л., Гоулд Б. Теория и применение цифровой обработки сигналов. М.: Мир, 1978. 834 с.
- Свинарчук А.А., Нечай А.А. Использование квантовых вычислений при выборе управленческого решения // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2018. № 2. С. 31–36.
- Шаймарданов А.М., Нечай А.А., Лепехин С.В. Математические модели систем автоматического управления с широтно-импульсной модуляцией // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2019. № 2. С. 27–39.
- Широбоков В.В., Нечай А.А. Алгоритм планирования энергосберегающей параллельной обработки информации с учетом информационной важности и времени поступления задач // Вестник Российского нового университета. Серия: Сложные системы: модели, анализ и управление. 2017. № 1. С. 88–93.
- Шульженко А.Д. Полимодельный принцип построения высокопроизводительной системы обработки данных дистанционного зондирования Земли // Globus: технические науки. 2020. № 3 (34). С. 13–20.
