АРХИТЕКТУРА СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКИХ ЭКСПЕРИМЕНТАЛЬНЫХ КОМПЛЕКСОВ НА БАЗЕ ЛИТИЙ-ИОННЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ

Автор: Д. В. Лисин
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Разработка приборов и систем
Статья в выпуске: 2, 2025 года.
Бесплатный доступ
Рассмотрена разработанная в ИЗМИРАН архитектура построения высоконадежной системы электроснабжения на базе литий-ионных аккумуляторных батарей, предназначенной для проведения научных экспериментов на борту космических аппаратов. Предложенный подход опирается на многолетний опыт в создании экспериментальных комплексов научной аппаратуры и позволяет преодолеть ряд принципиальных недостатков литий-ионных аккумуляторных батарей, открывая возможности использования их неоспоримых преимуществ в ходе создания новых перспективных приборных комплексов различного назначения на орбите Земли. Особое внимание уделено рассмотрению специфических для области применения вопросов начального включения питания комплекса, его наземной отработки и обеспечению надежности функционирования.
Система электроснабжения, литий-ионная аккумуляторная батарея, космический эксперимент, управление резервированием
Короткий адрес: https://sciup.org/142244854
IDR: 142244854 | УДК: 520.6.05
ARCHITECTURE OF THE POWER SUPPLY SYSTEM FOR SPACE EXPERIMENTAL COMPLEXES BASED ON LITHIUM-ION BATTERIES
The architecture of building a highly reliable power supply system based on lithium-ion batteries, designed for conducting scientific experiments on spacecraft board, is considered. The proposed approach is based on many years of experience in creating experimental scientific equipment complexes and makes it possible to overcome a number of fundamental disadvantages of lithium-ion batteries, opening up the possibility of using their undeniable advantages during the creation of new promising instrument complexes for various purposes in Earth orbit. Particular attention is paid to considering issues specific to the application area, such as the initial power-up of the complex, its ground testing, and ensuring reliable operation.
Текст научной статьи АРХИТЕКТУРА СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКИХ ЭКСПЕРИМЕНТАЛЬНЫХ КОМПЛЕКСОВ НА БАЗЕ ЛИТИЙ-ИОННЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ
ВВЕДЕНИЕ Суть этого эффекта заключается в том, что от-
При проведении экспериментов в условиях космического пространства один из главных ограничивающих разработчиков научной аппаратуры параметров — масса приборного комплекса. Именно ограничения по массе во многих случаях заставляют постановщиков экспериментов отказываться от сулящих интересные результаты схем построения приборов в пользу более примитивных.
Второй по значимости ограничивающий фактор — доступная мощность и ресурс работы системы электроснабжения космического аппарата. Применение классических для космоса решений в виде никель-кадмиевых аккумуляторных батарей (АКБ) при всех их несомненных достоинствах заставляет значительно урезать бюджет массы комплекса научной аппаратуры в пользу увеличения емкости бортовых АКБ, и наоборот. Применение широко распространенных в быту литий-ионных АКБ в условиях космического пространства наталкивается на ряд принципиальных сложностей, обусловленных свойствами элементов этих батарей [1, 2]. В частности, эти батареи не переносят отрицательных температур, быстро деградируют и выходят из строя при превышении уровня разряда и заряда, имеют малый срок службы. Сравнительно небольшой срок службы литий-ионной АКБ во многом обусловлен последовательной деградацией составляющих батарею элементов вследствие их так называемой разбалансировки.
дельные элементы батареи в последовательной цепи заряжаются и разряжаются несколько по-разному, что при заряде и разряде единым для всей цепи током приводит к тому, что эти элементы могут войти в область критического перезаряда или, наоборот, переразряда, в то время как напряжение на всей батарее находится в целом в допустимых пределах.
Стандартные алгоритмы управления заря-дом/разрядом в системах электроснабжения будут продолжать заряд или эксплуатацию АКБ, в то время как данные отдельные элементы уже начали подвергаться запредельным нагрузкам и, соответственно, ускоренно деградируют. После деградации первого элемента батареи ситуация усугубляется тем, что общее напряжение батареи несколько снижается и система управления зарядом будет увеличивать время и ток заряда, что будет приводить к ускоренной деградации следующего элемента и так далее до полной и все ускоряющейся деградации всей АКБ.
Решением данной проблемы является применение схем активной электронной балансировки элементов батареи, так называемых электронных нивелиров [3], которые для нормальной и длительной работы автономных комплексов, подобных рассматриваемым, требуют применения принципиально новых интеллектуальных систем управления, включающих в себя схему поэлементного контроля напряжений на отдельных ее элементах [4, 5].
Для нормальной работы всего комплекса научной и служебной аппаратуры на борту космического аппарата в первую очередь необходимо правильно увязать работу всех подсистем, связанных с управлением его системой электроснабжения, включая отмеченные выше и многие другие, что в рамках рассматриваемого подхода реализуется применением распределенной интеллектуальной системы управления электроснабжением.
ОБЩАЯ АРХИТЕКТУРА СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОСНАБЖЕНИЕМ
Применение литий-ионных элементов открывает реальную возможность начать резервирование системы электроснабжения с дублирования АКБ, поэтому рассматриваемая архитектура включает в себя две идентичные батареи № 1 и № 2, соединенные параллельно, как показано на рисунке. Отдельный вопрос, подлежащий рассмотрению вне рамок настоящей статьи — необходимость иметь возможность аварийного отключения одной из АКБ от системы в случае ее необратимой деградации в процессе длительного эксперимента. В описываемой системе такая возможность не предусмотрена в основном по соображениям надежности необходимых для этого дополнительных узлов.
Классическая схема начального включения электропитания космического аппарата — использование контакта отделения, который механически замыкается при отделении корпуса аппарата от выводящей платформы на последнем этапе работы ракеты-носителя. Как правило, этот контакт непосредственно коммутирует силовую цепь от АКБ к полезной нагрузке, обеспечивая ее начальное включение и дальнейшую работу. Цепь, получающая электропитание подобным образом, на рис. обозначена как "Питание системы". В эту схему добавлено силовое реле "Блокировка контакта отделения", обеспечивающее шунтирование контакта отделения после его первоначального срабатывания с целью исключить возможные эффекты, связанные с деградацией контактной группы в процессе длительного полета. Срабатывание этого реле происходит сразу же после появления питания системы.
С целью обеспечить возможность пробных включений в ходе проведения многочисленных наземных испытаний комплекса аппаратуры, в схему введены две управляющие кнопки "ВКЛ" и "ОТКЛ", которые подключаются к технологическим разъемам блоков электроники системы при наземной отработке. Кнопка "ВКЛ" подключается параллельно контакту отделения и имитирует его срабатывание даже на установленном на платформу космическом аппарате, а кнопка "ОТКЛ" воздействует на схему удержания реле блокировки контакта отделения, отключая его по окончании испытаний.
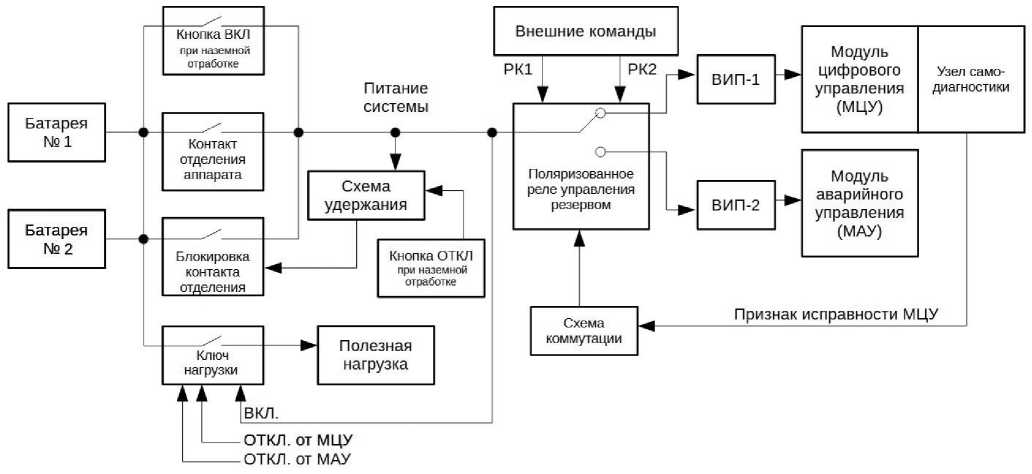
Рис. Архитектура системы электроснабжения космического аппарата. ВИП — вторичный источник электропитания, РК — радиокоманда
Основной интеллектуальный элемент системы управления обозначен на схеме рис. как модуль цифрового управления (МЦУ). Он получает стабилизированное питание от вторичного источника питания ВИП-1, который в свою очередь запитывается от контактов поляризованного реле управления резервом, обеспечивающим подачу питания либо на МЦУ, либо на модуль аварийного управления (МАУ), который питается от отдельного вторичного источника питания ВИП-2. Переключение между основной и резервной схемой питания осуществляется воздействием на поляризованное реле управления резервом двумя импульсными радиокомандами РК1 (основная схема) и РК2 (резервная схема) от внешней командной радиолинии по решению наземного центра управления.
Модуль цифрового управления реализует достаточно сложные алгоритмы, поэтому, как правило, выполняется на базе однокристальной микроЭВМ с соответствующими цепями загрузки, программирования и периферийных устройств. Вероятность отказа подобного узла, несмотря на все применяемые к элементной базе методы различного рода приемок, контроля, отбора и т.п., все-таки достаточно велика по сравнению с вероятностью отказа простых классических аналоговых схем прежнего поколения. По этой причине в состав системы вводится дополнительный автономный узел самодиагностики, представляющий собой максимально простую аппаратную схему на примитивных высоконадежных элементах, задача которой — принять независимое решение о работоспособности микро-ЭВМ и выдать соответствующую импульсную команду на переключение поляризованного реле управления резервом. МЦУ, в свою очередь, имеет возможность по результатам внутренней самодиагностики принять решение о невозможности продолжать функционирование и необходимости переключения питания на резервную схему управления, для чего ему достаточно просто прекратить соответствующее квитирование узла самодиагностики, который и произведет это переключение автоматически без команды с наземного центра управления.
АЛГОРИТМ ВКЛЮЧЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ
Применение интеллектуальной системы управления АКБ открывает возможность реализации функции защиты от сверхтоков на системном уровне, без классических предохранителей одноразового и многоразового типа со всеми присущими им недостатками, критичными в условиях космического пространства. При этом модуль цифрового управления (МЦУ) использует данные измерения тока нагрузки, которые, как правило, все- гда контролируются в подобных системах, и в случае превышения допустимого значения должен отключить ключ питания нагрузки, реализовав тот или иной заданный алгоритм работы автоматического предохранителя. Именно такую функцию и выполняет МЦУ в рассматриваемой системе по отношению к комплексу научной аппаратуры космического аппарата ("Полезная нагрузка" на рис.). Однако, исходя из требования, что полезная нагрузка должна безусловно включиться при срабатывании контакта отделения даже при условии полной неработоспособности интеллектуальной системы управления системой электроснабжения, архитектура системы строится таким образом, что появление напряжения на шине "Питание системы" безусловно воздействует на ключ нагрузки, приводя к ее автоматическому включению без участия МЦУ. В случае нормального включения в работу этот модуль имеет возможность подать команду на отключение ключа нагрузки при соблюдении определенных условий (стрелка "ОТКЛ. от МЦУ" на рис.) и на его обратное включение. Такое решение является некоторым компромиссом между вопросами надежности в части включения нагрузки и защиты цепей системы электроснабжения от сверхтоков, которая может выполняться и иными способами.
Таким образом, архитектура системы, как и во всех классических схемах построения систем электроснабжения космических аппаратов, предполагает безусловное включение полезной нагрузки после отделения от ракеты-носителя, в том числе включение бортовой командной радиолинии и прочих служебных систем аппарата для получения данных телеметрии. Дополнительные же функции, которые обеспечивает МЦУ, становятся доступными после его штатного включения по результатам самодиагностики. При этом нормально функционирующий МЦУ имеет возможность в любой момент отключить полезную нагрузку (всю или по группам, что не показано на рис.) в случае возникновения нештатных ситуаций, угрожающих космическому аппарату в целом.
ЗАДАЧИ И ВОЗМОЖНОСТИ МОДУЛЯ ЦИФРОВОГО УПРАВЛЕНИЯ
Центральным элементом интеллектуальной системы управления электроснабжением является модуль цифрового управления (МЦУ), который предназначен для решения следующих задач:
-
1) обработка и анализ данных узла поэлементного контроля напряжений АКБ [4];
-
2) управление током заряда АКБ методом выборочного отключения отдельных секций фотобатарей при фиксации ситуации перезаряда хотя бы одного из элементов;
-
3) управление включением и отключением электронного нивелира напряжения элементов [3];
-
4) сбор данных с температурных датчиков элементов АКБ;
-
5) отработка алгоритмов аварийного отключения нагрузки в целом, отдельных ее элементов, а также одной из АКБ системы электроснабжения;
-
6) обмен информацией с бортовой системой управления космического аппарата по одному из стандартных протоколов, передача телеметрической информации и прием команд на изменения настроек алгоритмов управления.
Управление током заряда является одной из важнейших функций МЦУ, которая позволяет значительно увеличить срок нормальной работы литий-ионной АКБ на борту космического аппарата. Солнечные фотобатареи для этого разбиваются на отдельные секции, ориентированные в пространстве по-разному, и отделяются от цепей заряда силовыми ключами, управление которыми и осуществляет МЦУ. Классический режим управления током заряда предполагает контроль общего напряжения батареи, по достижению некоторого порогового значения которого производится ограничение зарядного тока во избежание перезаряда элементов. Основным недостатком такого подхода является тот факт, что отдельный элемент батареи может зарядиться несколько раньше всех остальных. При этом суммарное напряжение батареи будет оставаться ниже заданного порога, т.к. вклад каждого отдельного элемента в общую сумму невелик. В результате на некоторое время данный элемент войдет в область сверхкритического перезаряда и начнет ускоренно деградировать. Реализация метода поэлементного контроля позволяет МЦУ не допускать подобной ситуации своевременным уменьшением зарядного тока, для чего ему достаточно по заданному алгоритму начать последовательное отключение силовых ключей секций фотобатарей.
Описанный выше метод управления зарядным током по напряжению самого заряженного элемента батареи неизбежно будет приводить к общему недозаряду батареи в целом, что является, безусловно, системным недостатком — АКБ-комплекс не будет набирать максимально возможный заряд на освещенных участках орбиты космического аппарата. Такой ценой приобретается значительное увеличение срока службы АКБ. Вследствие уникальных массогабаритных характеристик литий-ионных элементов этот недостаток может быть компенсирован некоторым увеличением расчетной емкости батареи, однако может быть полностью устранен применением еще одной функции системы — управление работой электронного нивелира напряжения. Это устройство встраивается в батарею и при включении производит перенос заряда с наиболее заряженных элементов на наименее заряженные, обеспечивая достаточно быстрое выравнивание поэлементных напряжений [3]. Постоянно держать это устройство включенным нельзя, оно рассеивает достаточно много энергии и создает значительный электромагнитный шум, поэтому в алгоритмы функционирования МЦУ закладывается задача включения электронного нивелира при достижении некоторого порогового значения разбаланса поэлементных напряжений и, соответственно, его отключения при снижении разбаланса до уровня технического нуля. Таким образом, в результате совместного применения функций управления секциями фотобатарей и электронных нивелиров АКБ аппарата всегда находятся в состоянии максимально возможного заряда при максимально увеличенном сроке службы батареи.
Не менее важной функцией рассматриваемой системы является защита АКБ от деградации в случае чрезмерного ее разряда, т.к. особенностью литий-ионных элементов по сравнению с элементами других типов является чрезвычайно высокая чувствительность к разряду ниже предельно допустимого уровня. В этом случае также происходит ускоренная деградация элемента вплоть до его переполюсовки со всеми вытекающими негативными последствиями для батареи в целом.
Так же как и в случае с перезарядом, классическая система контроля суммарного напряжения на клеммах АКБ может оказаться неспособной отреагировать на критический разряд одного из элементов батареи, вовремя отключив нагрузку, что неизбежно приведет к переполюсовке данного элемента и ускоренной деградации всей АКБ. При реализации метода поэлементного контроля МЦУ своевременно отключит полезную нагрузку, защищая бортовую батарею от катастрофического снижения ресурса. Типичный сценарий, в котором наглядно проявляются возможности рассматриваемой архитектуры системы управления, выглядит так:
-
• в результате некоторого сбоя в системе ориентации космический аппарат теряет ориентацию фотобатарей на Солнце, вследствие чего поступление энергии в бортовую систему электроснабжения значительно снижается;
-
• циклограмма работы полезной нагрузки, рассчитанная на заданные параметры энергобаланса, остается без изменений до следующего сеанса связи с наземным центром управления;
-
• космический аппарат входит в область тени с разряженными батареями, которые не способны более обеспечить питанием заданную циклограмму работы и входят в область сверхкритического разряда;
-
• в этот момент возможна ситуация потери аппарата, если он не успеет войти в зону радиосвязи с наземным пунктом до момента выхода из строя литий-ионной АКБ.
Обнаружив критический разряд одного из элементов АКБ, что означает, что алгоритмы управления штатной бортовой системы космического аппарата по каким-то причинам не справились с балансировкой электрической нагрузки, МЦУ отключит всю полезную нагрузку, оставив включенным только свой источник питания, тем самым снизив ток разряда АКБ практически до нуля. При выходе из тени даже с нарушенной ориентацией в результате вращения аппарат сможет подзарядить АКБ на минимально необходимый для включения бортовой радиолинии уровень, который определяется внутренними настройками МЦУ, войти в связь с наземным пунктом и восстановить нормальную работу всех систем под управлением наземного пункта.
Следует отметить также, что одной из многообещающих функций, которую с успехом может выполнять МЦУ, является динамическое управление током нагрузки фотобатарей, которое позволит увеличить отдачу ими полезной мощности при той же площади за счет того, что их ток нагрузки будет находиться всегда в оптимальной точке нагрузочной характеристики, однако данная тема находится за рамками настоящей статьи.
РЕЗЕРВИРОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ
В рассматриваемой архитектуре роль модуля цифрового управления в общей жизнеспособности комплекса экспериментальной аппаратуры достаточно велика, а сам модуль представляет собой достаточно сложное устройство, состоящее из множества элементов. По этой причине целесообразным является локальное резервирование этого узла, которое выполняется по классической схеме холодного резерва — в систему вводится дополнительный модуль аварийного управления (МАУ, рис.) с отдельным вторичным источником электропитания (ВИП-2, рис.).
Коммутация цепей питания вторичных источников МЦУ и МАУ осуществляется высоконадежным поляризованным реле, сама структура которого исключает одновременное включение обоих модулей. В исходном положении, в ходе наземной подготовки комплекса к полету, перекидной контакт этого реле установлен в положение, когда запитан ВИП-1 основного контура, и в подавляющем большинстве ситуаций далее не переключается.
Функционал модуля аварийного управления (МАУ) может быть как полностью идентичен функционалу МЦУ (полный вариант резервирования, симметричная схема), так и быть сокращенной до минимально допустимого уровня его версией, выполненной на базе отличных от МЦУ схемотехнических решений, например исключительно на жесткой логике микросхем средней степени интеграции, без использования СБИС. Система, показанная на рис., выполнена именно по такой несимметричной схеме резервирования.
Реле управления резервом может переключиться по импульсной радиокоманде служебной командной радиолинии (РК1/РК2 от наземного центра управления), или от контрольно-проверочной аппаратуры при наземных испытаниях, или от узла самодиагностики. Узел самодиагностики представляет собой отдельный автомат на элементах малой степени интеграции (цифровых и аналоговых элементах, обладающих повышенной стойкостью к воздействию внешних факторов космического пространства), задачей которого является непрерывный анализ некоторого признака работоспособности, который должен вырабатывать МЦУ. При отказе микро-ЭВМ, а также в случае принятия управляющей ею программой решения о невозможности МЦУ продолжать работу этот автомат также может выдать импульсную команду на переключение реле управления резервом.
Таким образом, в случае отказа МЦУ в большинстве прогнозируемых ситуаций через несколько секунд основной контур управления будет автоматически отключен и активирован резервный. Это решение во многом позволяет сохранить высокий уровень надежности по отказу элементов, присущий классическим системам электроснабжения на батареях иных типов, не использующих интеллектуальных систем управления собственной работой. И только в самых исключительных случаях может потребоваться возможность принудительного переключения питания с основной схемы управления на резервную и обратно.
Дискуссионным вопросом в описываемой архитектуре является реакция системы на отказ вторичного источника основного контура (ВИП-1 на рис.). В рассмотренном выше варианте построения в этом случае узел самодиагностики формально также будет обесточен и не сможет выдать автоматическую команду на переключение реле управления резервом. Следует отметить, что на работоспособности полезной нагрузки в краткосрочной перспективе эта ситуация никак не скажется, что позволит, обнаружив этот факт по данным телеметрии на ближайшем витке управления аппаратом, выдать соответствующую радиокоманду переключения по служебной командной радиолинии. Тем не менее представленная архитектура позволяет обеспечить автоматический ввод резервного контура и в этом случае, как минимум, двумя вариантами:
-
• реализовав схему кратковременного автономного питания узла самодиагностики, например, на базе диода/конденсатора достаточно большой емкости, чтобы обеспечить возможность выдачи импульса переключения реле управления резервом при пропадании входного напряжения питания от ВИП-1;
-
• реализовав полностью симметричную схему управления с идентичными модулями, вторичные источники электропитания которых соединяются по схеме, обеспечивающей их аппаратное попеременное включение в случае отказа одного из них; такую схему построить возможно, однако описание ее лежит за рамками настоящей статьи.
ВЫВОДЫ
Рассмотренная архитектура построения системы электроснабжения комплексов экспериментальной аппаратуры снимает многие ограничения, препятствующие применению литий-ионных аккумуляторных батарей в условиях космического пространства, что, в свою очередь, позволяет значительно изменить бюджет массы космического аппарата от системы электропитания в сторону полезной нагрузки. В большинстве случаев это позволит значительно увеличить возможности проведения научных экспериментов в условиях космического пространства.
В данной статье обсуждаются в основном концептуальные вопросы построения подобных систем, оставляя за рамками вопросы их схемотехнической реализации, часть из которых обсуждается в других публикациях [6, 7].
Список литературы АРХИТЕКТУРА СИСТЕМЫ ЭЛЕКТРОСНАБЖЕНИЯ КОСМИЧЕСКИХ ЭКСПЕРИМЕНТАЛЬНЫХ КОМПЛЕКСОВ НА БАЗЕ ЛИТИЙ-ИОННЫХ АККУМУЛЯТОРНЫХ БАТАРЕЙ
- 1. Хромов А.В. Литий-ионные аккумуляторные батареи низкоорбитальных космических аппаратов // Вопросы
- электромеханики. Труды ВНИИЭМ. 2016. Т. 152, № 3. С. 20–28. URL: https://jurnal.vniiem.ru/text/152/20-28.pdf
- 2. Lithium Batteries: Science and Technology / ed. by G.A. Nazri, G. Pistoia(s.). Springer, 2009.
- 3. Гаврилин А.Н. Применение унифицированных активных модулей выравнивания напряжения на отдельных элементах аккумуляторных батарей // Труды III Межвузовской научно-практической конференции "Проблемы технического обеспечения войск в современных условиях", Санкт-Петербург, 16 февраля 2018 г. Том 1. С. 247–252. EDN: ORLGVF
- 4. Лисин Д.В. Реализация метода поэлементного контроля литий-ионных аккумуляторных батарей при работе на борту космических аппаратов научного назначения // Научное приборостроение. 2018. Т. 28, № 2. С. 69–74. URL: http://iairas.ru/mag/2018/abst2.php#abst10
- 5. Лисин Д.В. Эффект самоподпитки ключей в схеме поэлементного контроля литий-ионной аккумуляторной батареи на борту космических аппаратов // Научное приборостроение. 2019. Т. 29, № 2. C. 78–82. URL: http://iairas.ru/mag/2019/abst2.php#abst10
- 6. Лисин Д.В. Контроль поэлементных напряжений на литий-ионной аккумуляторной батарее на борту космического аппарата // Силовая электроника. 2021. Т. 91, № 4. C. 62–65. URL: https://power-e.ru/hit/kontrol-poelementnyh-napryazhenij/
- 7. Лисин Д.В. Блок управления поэлементным контролем напряжений на литий-ионной аккумуляторной батарее для применения в космических экспериментах // Приборы и техника эксперимента. 2024. № 1. С. 208–209. URL: https://iet.ras.ru/2024/1/pub/IET_01_2024pdf/80Lisin.pdf
