Архитектура тренажерной системы подготовки операторов радиационно стойких манипуляторов

Автор: Носиков Максим Владимирович
Рубрика: Управление в технических системах
Статья в выпуске: 2 т.19, 2019 года.
Бесплатный доступ
Описана концепция построения, структура и практическая реализация тренажерной системы для подготовки операторов радиационно стойких дистанционно управляемых роботизированных электромеханических манипуляторов, устанавливаемых в герметичных камерах. В настоящее время на предприятиях атомной отрасли широко применяются механические и электромеханические манипуляторы копирующего типа. Современные подходы к построению систем управления и человеко-машинных интерфейсов позволяют уйти от способа прямого копирования кинематических конфигураций задающего и исполнительного органов и реализовывать как автоматизированные, так и автоматические режимы управления. Ключевой особенностью является присутствие человека в контуре управления, что обусловливается большим разнообразием и сложностью выполняемых операций и в ряде случаев недетерминированностью самой рабочей среды. В связи с этим вне зависимости от типа применяемых органов управления необходимо формирование устойчивых навыков выполнения операций, в том числе с использованием систем обучения и тренажерных систем. Задачами тренажерных систем для оборудования подобного типа являются: теоретическая подготовка операторов, поэтапная подготовка операторов к выполнению практических функций управления манипуляторами, реализация периодического контроля квалификации оператора, выполнение функций мониторинга управляющих воздействий на всех этапах выполнения технологических операций, регистрация и анализ предаварийных и аварийных состояний как манипулятора, так и его системы управления. Использование в составе системы дополнительной рабочей станции инструктора позволяет строить процесс подготовки в режиме непосредственного взаимодействия и совместного управления «оператор - инструктор». В работе приведены архитектура программной части тренажерной системы, интерфейсы взаимодействия с системой управления, структура базы данных регистрируемой информации.
Робот-манипулятор, тренажерная система, база данных, система управления
Короткий адрес: https://sciup.org/147232252
IDR: 147232252 | УДК: 007.51:007.52:681.518 | DOI: 10.14529/ctcr190204
The architecture of human-controlled arm manipulator operator training system
Nowadays Industrial robots of different kinematic structures and functionality are widely used nowadays in different areas of industry and most of them function autonomously with pre-programmed set of actions or typical trajectories. Some special purposes mobile and stationary robots are human-controlled and in most cases require qualified operator skills. For example, in nuclear industry the mechanical and electro-mechanical “master arm - slave arm” manipulators are widely used. Modern approaches of control systems and human machine interfaces designs allow to eliminate direct copy of kinematic configuration of manipulator arms, add semi-automatic and automated control modes. Key feature of such manipulator systems is a presence of human in control loop, by reason of variety and complexity of manipulations and, in some cases, non-deterministic environment. Due to these factors, it is very desirable to form operator sustainable skills to control such manipulators, including learning process using training systems. This article describes general approaches and practical aspects of the operator training and qualification system for arm-based special purpose manipulators. The set of training system functions include: general manipulator control (basic motion) and grasping actions, manipulator operations in restricted working areas, operator actions using virtual reality helms and multi-monitor visualization, etc. The hardware and software architecture of training system should allow effective training process and teamwork of trainee and instructor to reach good results. The paper proposes ROS-based software part of training system with description of inter-process communication messages, data formats, integration with database and following analysis of trainee action.
Текст научной статьи Архитектура тренажерной системы подготовки операторов радиационно стойких манипуляторов
Современные многокоординатные робототехнические комплексы и манипуляторы с электрическими исполнительными приводами широко используются во многих отраслях промышленности и в большинстве случаев являются высокоавтономными системами, функционирующими в автоматическом режиме. Их типовыми режимами работы являются: выполнение движений по заданной траектории с требуемой скоростью без учета недетерминированности внешней среды; адаптивное выполнение движений по требуемой траектории с анализом внешних условий среды (например, при использовании системы технического зрения).
Отдельным классом робототехнических комплексов (РТК), мобильных и стационарных манипуляционных систем являются комплексы с участием человека непосредственно в контуре управления. РТК данного типа применяются в технических областях с нестационарными и/или недетерминированными условиями внешней среды, в частности: РТК для военной сферы, РТК системы разминирования, пожарные РТК. Одной из важнейших сфер применения РТК такого типа является атомная промышленность, где влияние ряда опасных факторов (радиационные поля, химически агрессивная среда и т. д.) и высокая степень вариативности выполняемых операций сочетается с необходимостью защиты человека от опасных факторов. Разработанные в 60–70-е гг. XX в. манипуляторы были построены по схеме копирования положения задающего органа исполнительному механизму (манипулятору) механическими передачами или электромеханической сельсинной системой [1]. Ряд отечественных и зарубежных предприятий по настоящее время выпускает электромеханические копирующие манипуляторы, а количество эксплуатируемых РТК данного типа на предприятиях атомной отрасли РФ доходит до нескольких сотен единиц. На рис. 1 изображен типовой электромеханический манипулятор легкого класса грузоподъемностью до 15 кг. Местом установки исполнительных органов (манипуляторов) является потолок толстостенной герметичной камеры, гарантированно защищающей оператора и обслуживающий персонал от влияния опасных факторов. Оператор выполняет требуемые технологические операции путем механического воздействия и перемещения задающего органа, кинематически идентичного исполнительному органу. Контроль выполнения операций осуществляется путем визуального наблюдения через толстостенное стекло передней стенки камеры. На рис. 2 приведен разрез (вид сбоку) типовой герметичной камеры с установленными манипулятором и задающим органом.
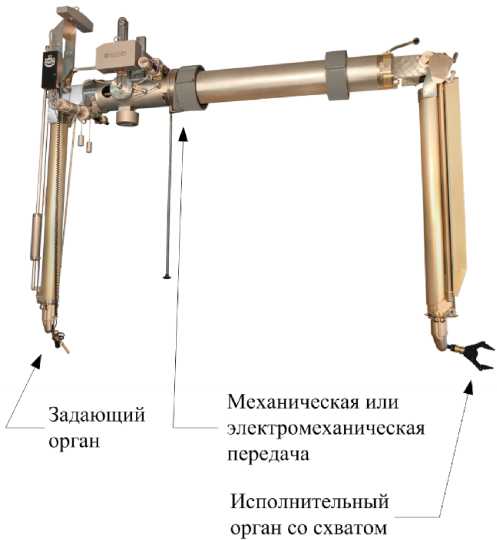
Рис. 1. Копирующий манипулятор легкого класса
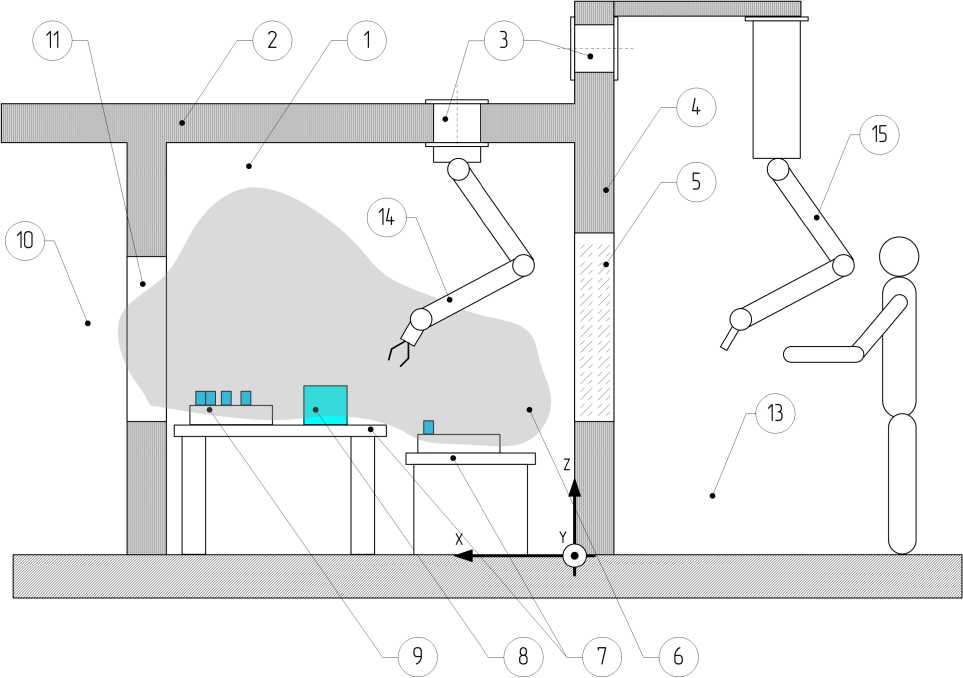
Рис. 2. Герметичная защитная камера (вид сбоку, разрез)
На рис. 2 обозначены:
-
1 – герметичный объем камеры;
-
2 – потолок камеры;
-
3 – герметичные каналы («проходки») для технологического оборудования и манипуляторов;
-
4 – передняя стенка камеры;
-
5 – толстостенное защитное стекло;
-
6 – рабочее пространство технологического оборудования и манипуляторов при выполнении типовых внутрикамерных операций;
-
7 – основные и вспомогательные рабочие поверхности для размещения оборудования и материалов;
-
8 – внутрикамерные технологические приспособления, измерительные устройства;
-
9 – технологическая посуда (тара) в контейнере;
-
10 – технологическая зона (транспортный коридор) для осуществления межкамерных транспортных операций;
-
11 – технологическое окно между камерой и транспортным коридором (приемная зона камеры);
-
12 – транспортное оборудование для межкамерных операций;
-
13 – операторская зона;
-
14 – внутрикамерный манипулятор;
-
15 – кинематически-подобный задающий орган.
Несмотря на очевидное достоинство кинематически-подобных систем в части идентичности кинематических конфигураций задающего и исполнительного органов при выполнении операций, копирующие манипуляторы имеют ряд недостатков:
-
1) высокие величины механических нагрузок на руки оператора, высокая утомляемость при длительном выполнении технологических операций;
-
2) наличие люфтов в кинематических парах как манипулятора, так и задающего органа, приводящие к потере точности позиционирования, а в ряде случаев – к невозможности выполнения требуемых операций;
-
3) фиксированные передаточные отношения (1 : 1) между задающим органом и манипулятором, что вызывает определенные трудности при осуществлении операций, требующих повышенной точности позиционирования схвата;
-
4) невозможность автоматизации операций, выполняемых с помощью манипуляторов данного типа.
Современные технические средства и комплексы программных продуктов для синтеза систем управления позволяют строить высокоэффективные решения по управлению сложными техническими объектами, в том числе многокоординатными манипуляторами. В целом к задачам систем управления РТК с участием человека в контуре управления можно отнести:
-
1) обеспечение выполнения технологических манипуляционных операций с требуемыми точностью и быстродействием; обеспечение возможности работы в ручном, автоматизированном и автоматическом режимах;
-
2) предоставление оператору средств воздействия/управления (задающих органов), позволяющих формировать и контролировать величину и, при необходимости, направление управляющих воздействий;
-
3) формирование и визуализацию с помощью технических средств вектора состояния системы, необходимого и достаточного для однозначного его восприятия оператором;
-
4) обеспечение функций контроля и безопасности при манипуляционных действиях;
-
5) обеспечение сопряжения с системами более высокого уровня с целью информационной интеграции отдельных технологических зон в единое информационное пространство современных производств (технологии «цифровое производство», «Индустрия 4.0» и т. д.).
В качестве человеко-машинного интерфейса в части задающих органов возможно применение целого ряда современных устройств: устройства управления типа «мышь»; двух- и многоосевые джойстики; задающие устройства с тремя поступательными и тремя вращательными степенями свободы, в том числе беспроводные на базе инерциальных сенсоров; экзоскелеты и т. д.
Зарубежные производители радиационно стойких манипуляторов (в частности французская фирма LaCalhene) приступили к созданию и опытной эксплуатации подобных систем [2]. Лаборатория робототехники филиала ЮУрГУ в г. Миассе в период 2015–2018 гг. выполнила проектирование, изготовление и ввод в опытную эксплуатацию шестистепенного радиационно стойкого манипулятора «МР-48» грузоподъемностью до 15 кг [3–5]. Входящий в состав пульта управления промышленный персональный компьютер с сенсорным экраном обеспечивает визуализацию состояния комплекса в графическом и текстовом видах. В качестве задающих органов используются два промышленных многоосевых джойстика (рис. 3).

Рис. 3. Манипулятор МР-48 и его пульт управления (операторская рабочая станция)
В п роц е с се оп ытн ой э к сп лу а та ц и я ма н и п ул я тора « МР-48» осуществлялась регистрация и ан а ли з д е й с тв и й оп е ра т о ра н а за дающие органы, а также выполнялся общий а н а ли з готов н ос ти о пера торов к и с п ользова н и ю д и с та н ц и он н о у правляемых РТК с задающими органами типа «джой с ти к». С ц е лью у лучш е н и я навыков работы оператора как в обычных у с лов и ях э к с п лу а та ц и и , так и п ри а в а ри й н ых ре жи мах работы была предложена подсистема трена же рн о го об у че н и я, мон и тори н га и анали з а де й с тв и й оп е ра т ор а как часть программного комплекса системы управления «МР-48».
Общая архитектура тренажерной системы
З а д а ча ми тр е н аже рн ой си с темы являются теоретическая подготовка, фор ми ров а н и е , отра ботк а и оц е нк а п р а к ти чес к и х н авыков работы с дистанционно управляемым и манипуляторами. Проц е сс о б у че н и я может быть ра з б и т н а с л е д у ю щ ие э та п ы:
Теоретическая часть:
-
• т ехн ичес к ие ха ра к т е ри с т ики РТК, конструкция РТК, рабочая зона ма ни п у лятора , п ри меняемый сменный инструмент;
-
• с трук ту ра п у льта уп ра в ле ни я и орга н ов у п ра в ле н и я ма н и п у лятором;
-
• проц е дуры в к люче н и я и о с та н ов а РТ К ;
-
• об щ и е п ри н ц ип ы у п ра в ле н и я Р Т К .
Практическая часть:
-
• ра б ота с п одс и с те мой в изу ализации (рабочие окна программного обес п е чен и я, и зме н е н и е сос та в а ото б ражае мых п ара ме тров , в н е ш не го в и да 3 D-моделей и т. д.);
-
• базовые ком анды и оп е рац и и п о ре к онфи гу ра ц и и м а н и п у лятора ;
-
• вы пол н е н и е оп ера ц и й в прямоугольной декартовой системе координат схв а т а;
-
• вы пол н е н и е оп ера ц и й в прямоу гольн ой б а зов ой с ис те ме коорд и н а т ;
-
• з а хв ат и отп у с к а н и е объ е к тов ;
-
• форм и ров а н и е , с охр а н е ни е и в ос п рои зв е д ение траекторий движения;
-
• пере в од ма н и п ул я тора в и с ходное положение («парковка» манипулятор а );
-
• вы пол н е н и е оп ера ц и й пр и а в а ри й н ых режи мах ра боты ма н и п у лятора .
В те орети че ск ой ча с ти возм ожна организация проведения промежуточны х и и тог ов ых тестов. Готовность о бу ча е мых оп е раторов к выполнению практической экспл у а та ц и и Р Т К може т ба зи роватьс я н а оц е нк е ин с тру ктора, анализе зарегистрированных системой у п ра в ле н и я д а н н ых о ха рак те ре у п ра в ле н и я, т очн ос ти и б ы с троте в ып о лн е н и я опера ц и й.
Человеко-машинный интерфейс (интерфейс «человек-манипулятор») включает в себя четырехосевой и трехосевой джойстики с пропорциональными и дискретными каналами управления, сенсорный монитор, который также может являться источником управляющих сигналов. Рис. 4 отображает общую структуру взаимодействия «человек-манипулятор». Оператор руками выполняет механическое перемещение рукояток задающих органов, что вызывает формирование управляющих воздействий, являющихся уставками для угловой скорости или углового положения звеньев и кисти манипулятора.
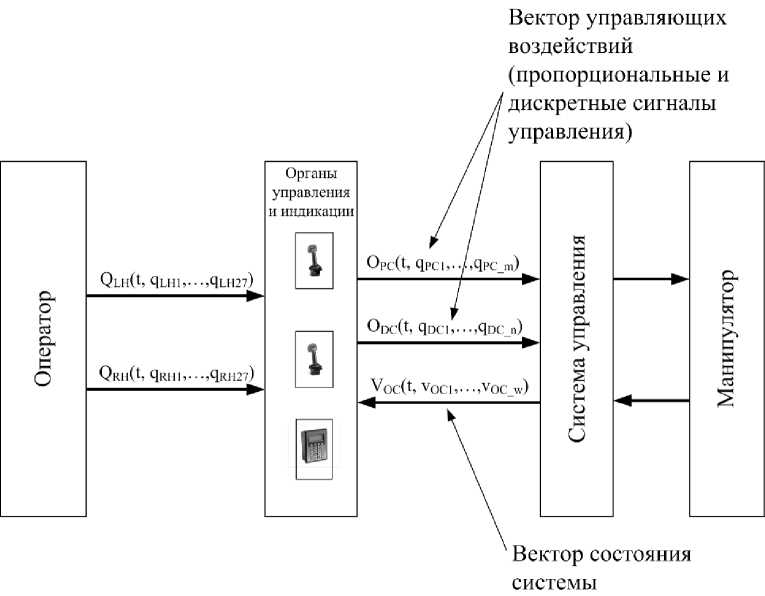
Рис. 4. Общая структура взаимодействия «человек-манипулятор»
На рис. 4 обозначены:
Q LH – вектор перемещения (положения) левой руки оператора;
Q RH – вектор перемещения (положения) правой руки оператора;
O PC – вектор величины отклонения рукоятки джойстиков (пропорциональных каналов управления);
O DC – вектор состояния дискретных каналов управления (аппаратные и программные кнопки и тумблеры);
V OC – вектор состояния манипулятора и системы управления.
Обновление значений компонент векторов управляющих воздействий O PC , O DC может формироваться асинхронно, значения компонент вектора состояния системы V OC обновляются синхронно в соответствии с фиксированным тактом вычисления контуров управления системы (рис. 5).
При реализации тренажерной системы (практической части) необходимо обеспечить выполнение следующих задач:
-
1. Формирование набора обучающих и контрольных практических заданий (траекторий движения, исходных и финальных конфигураций манипулятора и т. д.) для различных сценариев реализации технологических операций.
-
2. Обеспечение гарантированной записи на информационный носитель всех управляющих векторов, векторов состояния, режимов и настроечных параметров системы. Реализация данной задачи позволяет провести:
-
• анализ воздействий оператора на органы управления в течение всего этапа обучения или выполнения технологической операции;
-
• анализ адекватности воздействий оператора, исходя из состояния системы (кинематической конфигурации манипулятора);
-
• повторное воспроизведение воздействий оператора и параметров движения манипулятора, в том числе с различным масштабом по времени. Повторное воспроизведение и анализ состояния системы могут быть выполнены как на манипуляторе, так и на его программной математической модели.
-
3. Организация участия инструктора в процессе тренажерной сессии с целью оперативной коррекции действий обучаемого оператора. Данный подход предполагает наличие рабочего места инструктора с идентичным операторскому составу задающих органов, при этом воздействия инструктора на задающие органы должны иметь более высокий приоритет по сравнению с воздействиями оператора.
Состояние каналов управления
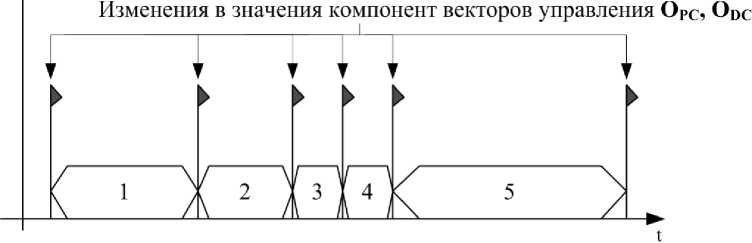
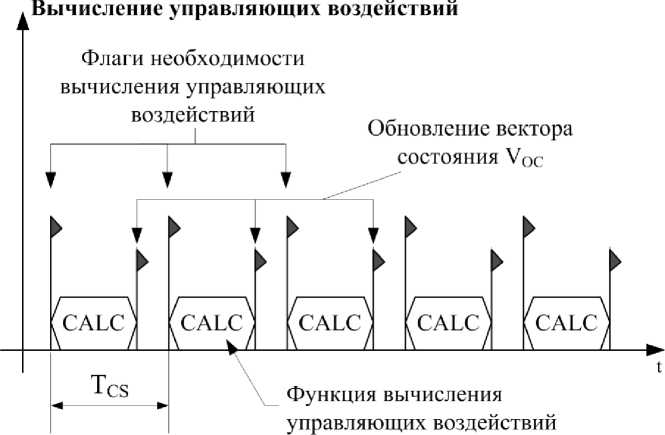
Рис. 5. Общая структура взаимодействия «человек-манипулятор»
В процессе подготовки тренажерной сессии инструктор формирует или выбирает из списка типовых операций текущее задание, учитывая при этом квалификацию обучаемого оператора. Настройка задания выполняется на рабочей станции инструктора (рис. 6) и может включать в себя: начальную кинематическую конфигурацию манипулятора, количество объектов манипулирования, конфигурацию расположения препятствий и т. д.
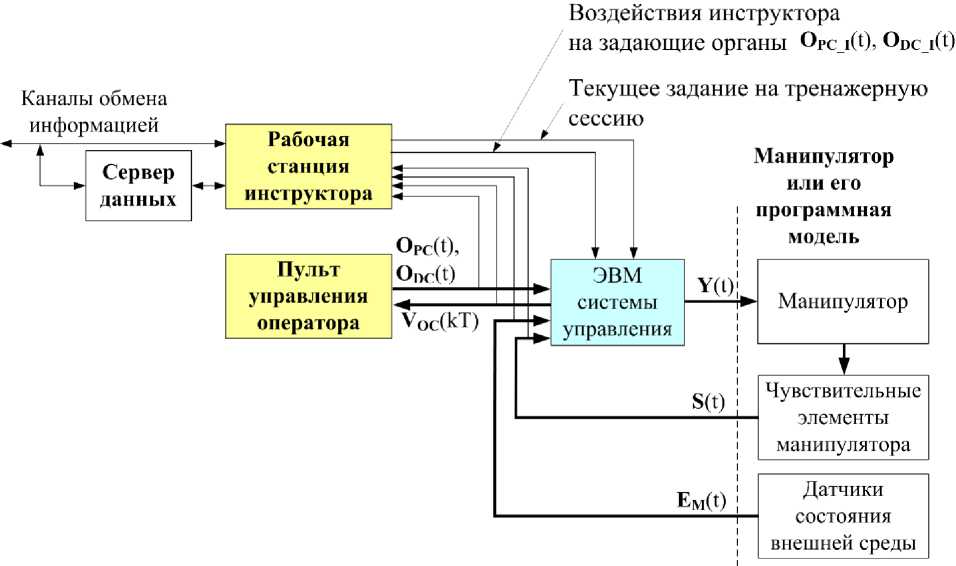
Рис. 6. Укрупненная структурно-функциональная схема тренажерной системы
Программное обеспечение тренажерной системы
При реализации программных модулей тренажерной системы требуется исходить из аппаратно-программной архитектуры системы управления РТК. На сегодняшний день существует ряд подходов и программных платформ для реализации систем управления, один из наиболее широко применяющихся – использование специализированных программных наборов библиотек («фрэймворков», наборов алгоритмов, функций и программных классов). Одним из наиболее популярных решений для задач мобильной и стационарной робототехники является использование фрэймворка Robotic Operating System (ROS, ROS2, ROS-Industrial) [6, 7]. Фрэймворк ROS является «надстройкой» над операционной системой (ОС, базовой являются ОС класса Linux). В состав ROS входит ядро системы, выполняющее функции арбитража, синхронизации, организации межпроцессного взаимодействия, большое количество специализированных программных библиотек и модулей, реализующих специфичные для робототехнических применений алгоритмы приема и обработки данных первичных измерителей, решения задач навигации, кинематики и динамики РТК, локализации и прокладки маршрутов и траекторий движения. Программная архитектура ROS поддерживается большим числом как исследовательских проектов и лабораторий, так и ведущими производителями промышленного робототехнического оборудования, такими как FANUC, ABB, Universal Robots. Разработчикам систем управления РТК предоставляется широкий спектр средств разработки и отладки собственных программных модулей, интегрируемых в общую программную инфраструктуру ROS («Модуль 1», «Модуль N», рис. 7).
Одной из ключевых особенностей ROS является подсистема обмена сообщениями между программными компонентами системы управления, выполняющая гарантированную доставку информации от модуля-отправителя к модулю-получателю. Подсистема позволяет выполнять обмен как типовыми структурами данных (целые и дробные числа различного формата, строковые сообщения, сообщения от стандартных устройств ввода-вывода), специализированными сообщениями (матрицы однородных преобразований, сообщения-вектора текущей конфигурации манипулятора), так и сложными пользовательскими структурами сообщений. Подсистема мониторинга сообщений ROS позволяет осуществлять мониторинг передачи сообщений, используя различные критерии фильтрации, текстовый и графический вывод информационных данных и т. д. Для тренажерной системы подсистема обмена сообщениями ROS является основным источником информации о текущем состоянии СУ, действиях оператора и инструктора.
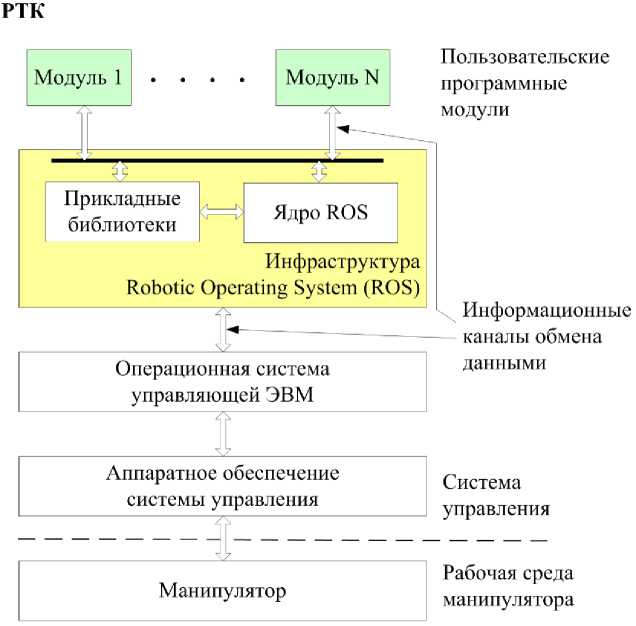
Рис. 7. Инфраструктура ROS в составе аппаратно-программной системы управления РТК
Алгоритмы запуска и инициализации пользовательских программных модулей (именуемых в ROS узлами) позволяют передавать ядру ROS перечень сообщений, которые требуются данному узлу от других компонент и узлов системы, а также перечень сообщений, формируемых данным узлом при выполнении периодических или апериодических действий. Таким образом формируется таблица информационного взаимодействия программных узлов, пример которой в графическом виде, подготовленным стандартной ROS-утилитой rqt_graph, представлен на рис. 8. При получении сообщения определенного типа программный узел вызывает функцию обработки сообщения, выполняет необходимые математические и/или логические операции и формирует ответное сообщение.
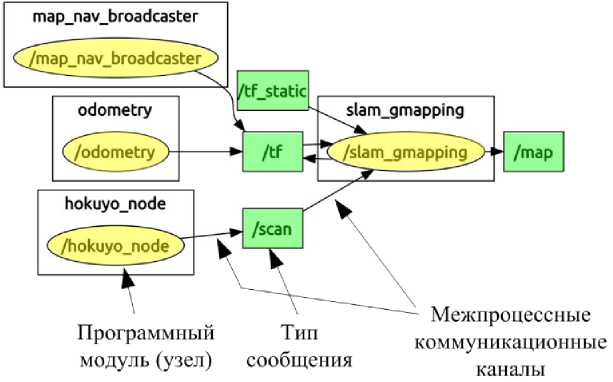
Рис. 8. Пример графа связей программных узлов системы управления, подготовленный утилитой rqt_graph
Для о б е с п е ч е н и я фу н к ц ий уп равл е н и я манипулятором МР-48 и функций тренажерной систем ы в п рограмм н ой час т и с и с темы управления реализован следующий сос та в п рогра ммных м оду ле й ( у злов ) и в за и мод ей с тв ие м еж д у ни ми ( таб л. 1, ри с . 9 ) :
Таблица 1
Основные программные ROS-модули (узлы) системы управления МР-48
|
Узел |
Функциональное назначение |
|
/mr_algorithms |
О снов н ой программный модуль, реализующий алгоритмы у п ра в ле н и я МР-48 |
|
/mr_hrdw_interface |
Мод у ль об м е н а и н фо рмац и е й с а да п те ра ми в в ода -вывода манипулятора МР- 48. Реа ли зует вы д а чу у правл яю щ и х воздействий и прием информации от чу в с тв и те льн ы х э ле мен тов ма н и п у лятора |
|
/trainee_ctrls /instructor_ctrls |
П рограммные модули, реализующие прием сигналов от п роп орц и он а л ь ны х и д искретных каналов управления задающих орга н ов оп е р а тора и ин с тру к тора |
|
/training_task |
П рограммный модуль формирования текущего задания в о в ре мя тре н а же рн ой се сс и и |
|
/storage |
П рограммный модуль хранения векторов состояния и у п ра в ле н и я, в заи м оде й с тв и е с с е рв е р ом б азы д а н н ых |
|
/usb_cam |
П рограммный модуль приема и визуализации видеодан н ых от видеока м ер, ус та новленных на манипуляторе и/или в герметичн ой к а ме ре |
|
/speech_database /sound_play |
П рограммные модули формирования речевой и аудио и н форм а ц и и п ри вы пол н ении определенных этапов тренажерной сессии ли б о н ас ту п ле н и и опред е л е н н ых с обыти й в с истеме управления |
External software
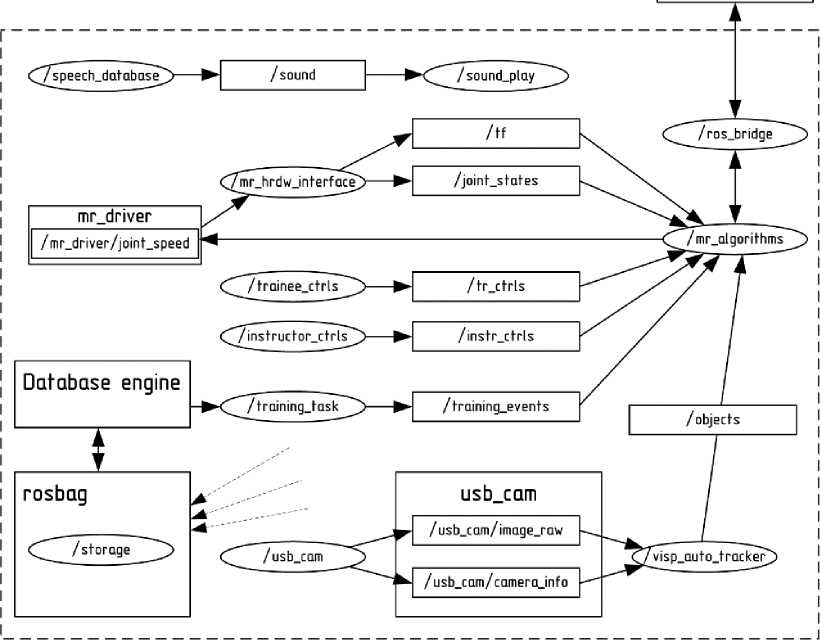
Рис. 9. Граф взаимодействия ROS-узлов системы управления МР-48
Для регистрации (сохранения) межмодульного взаимодействия в системе ROS используется сервис rosbag – набор функциональных модулей и процедур для обеспечения записи требуемых сообщений в файловую систему, используя заданные критерии. В процессе записи обеспечивается автоматическое формирование порядкового номера сообщения и его строгая привязка к системному времени. Записанные сообщения могут быть визуализированы в графическом и табличном виде как внутренними средствами ROS, так и внешним программным обеспечением. В системе тренажерного обучения записанная информация может быть использована как для анализа действий в режиме «отложенного времени», так и быть воспроизведена повторно для оценки действий в режиме «реального времени». Пример заголовка rosbag-файла с суммарной информацией о типе и объеме записанной информации приведен на рис. 10.
Информация о хранимых сообщениях
Суммарная информация об объеме данных
Общая информация о хранимых данных lab302-O201ab302-02:~/catkin ws$ rosbag info test2_2018-08-07-20-48-17.bag path: version: duration: start: end: size:
2.0 23.5s
Aug 07 2018 20:48:17.87 (1533656897.87)
Aug 07 2018 20:48:41.33 (1533656921.33) 1.0 MB messages: 3327
conpresslont none [2/2 chunks)
types:
sensor_nsgs/Jointstate [3066dcd76a6cfaef579bd0f34173e9fd]
topics:
sensor msqs/ Jov /joint_states) /joy
[5a 9 ea 5 f 8350S693b71e785 041_e 6 7 a 8 b b ]
2934 msgs I : i sensor_nsgs/Jointstate 'l
393 msgs
sensor_nsgs/JointState
sensor_nsgs/Joy
Типы сообщений Количество Структура
сообщений сообщений
Рис. 10. Пример заголовка зарегистрированного rosbag-файла системы управления МР-48
В табл. 2 приведены типы хранимых в системах управления и тренажерного обучения МР-48 сообщений, периодичности их поступления и оценочные объемы сохраняемой информации.
Таблица 2
Типы и объемы данных регистрируемых сообщений системы управления МР-48
|
Тип сообщения |
Описание |
Темп поступления, Гц |
Объем регистрируемой информации, МБ/мин |
|
/tr_ctrls /instr_ctrls |
Управляющие воздействия на задающие органы оператора и инструктора |
1–50 |
0,1–1 |
|
/joint states |
Кинематическая конфигурация манипулятора (угловые положения и угловые скорости звеньев манипулятора) |
50 |
2 |
|
/tf |
Матрицы однородных преобразований текущей кинематической конфигурации манипулятора |
50 |
2 |
|
/training_events |
Текстовые и числовые сообщения о текущей тренажерной сессии |
непериодические |
0,1 |
|
/usb_cam/image_raw |
Видеопоток данных от внешней USB-камеры |
10–50 |
10–100 |
Программный модуль «D a ta b a se engine» (см. рис. 9) обеспечивает организацию хранения инф орм аци и о п роц е ссе тр е н а ж е рной подготовки, включая идентификацион н у ю и н форма ц и ю о б о пера торе, и н с трук торе, т рен ажерных заданиях, тренажерных сессиях, резу льта та х в ып олн е н и я о пера тором того ил и и н ого з ад а н и я. Мод у ль « Database engine» осуществляет интеграцию данной и н форма ц и и с и нформа ци е й , з а реги ст ри ров а н н ой в rosbag-файле в единой реляционной SQL базе данных (MariaDB 5 . 0). Уп рощ енный вариант структуры таблиц базы дан н ых и и х отн оше н и й приведен на рис. 11.
Trainees
Instructors
TraineelD
InstructorlD
Tests
TestlD
TraineeClass
Comments
InstructorlD
Comments
TraineelD
TaskID
DataTimeStamp
Courses
Tasks
CourselD
TaskID
LinkToRealTrajectoiy
TestComments
CourseName
— SessionlD
TestRcsults
CourscDcscription
TaskDcscription
Sessions
SessionlD
TaskQualification
LinkToIdealTrajectory
CourselD
SessionDescription
|
Таблица |
Описание |
|
Trainees |
Таблица данных об обучаемых |
|
Instructors |
Таблица данных об инструкторах |
|
Courses |
Таблица данных о программе подготовки |
|
Sessions |
Таблица данных о тренажерных сессиях |
|
Tasks |
Таблица данных о выполняемых заданиях |
|
Tests |
Таблица данных о результатах выполннсния заданий |
Рис. 11. Упрощенная структура базы данных тренажерной системы
Программные средства анализа данных тренажерной системы
Ин с тру к тор и ме е т в озмож ность осуществлять анализ действий операто ра и н а ос н ов а н и и да н н ой и нформ ац ии п ри ни ма ть решение о квалификации оператора, испол ьзу я с лед у ю щ и е с ре дства:
-
1) н аб люд е н и е за д е й с тв и ями оператора, конфигурацией и движениями ма н ип у лятора в реж и м е реа льн о го в ре ме н и , и с п ользуя программные средства визуализации те ку щ е й и н форма ц и и ;
-
2) ан а ли з за п и с а н н ой в и деоинформации с камер обзора, установленных на ма ни п у ляторе и л и в герметичной камере;
-
3) ан а ли з за ре гис три ров а н ных векторов состояния и управления в виде д в у мерн ых графи ков с од н ов ре ме н ным отоб р аже н и е м (в режиме наложения) требуемых (заданн ы х, и д е альн ых ) д е йс тв и й и трае к тори й и в озм ож ность ю п ов торен ия ( р е жи м в ос п р оизв е д ения) определенных временных интервалов (рис. 12);
-
4) о т ображе н и е тр е хме рных конфигураций и движений манипулятора с н е с к о льк и х точек о бзора . Да н ный режи м п рим еняе тся на виртуальной модели манипулятора (рис . 13).
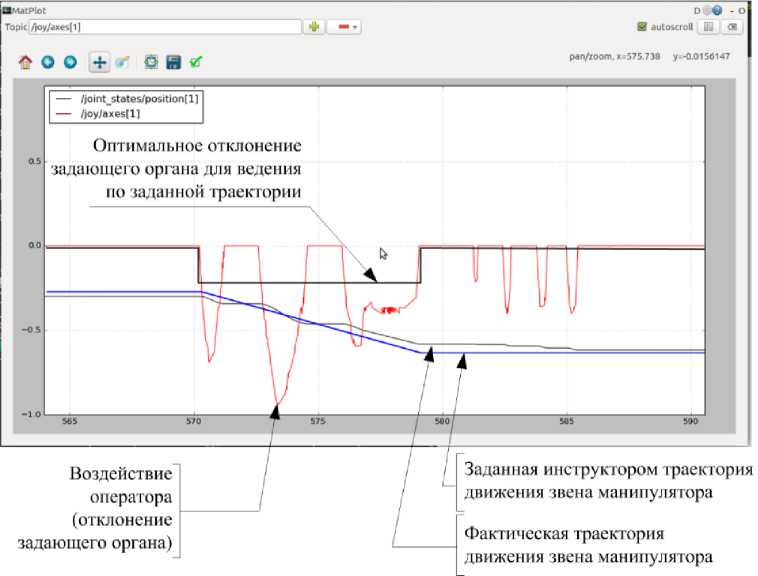
Рис. 12. Анализ действий оператора, представленных в виде временной зависимости
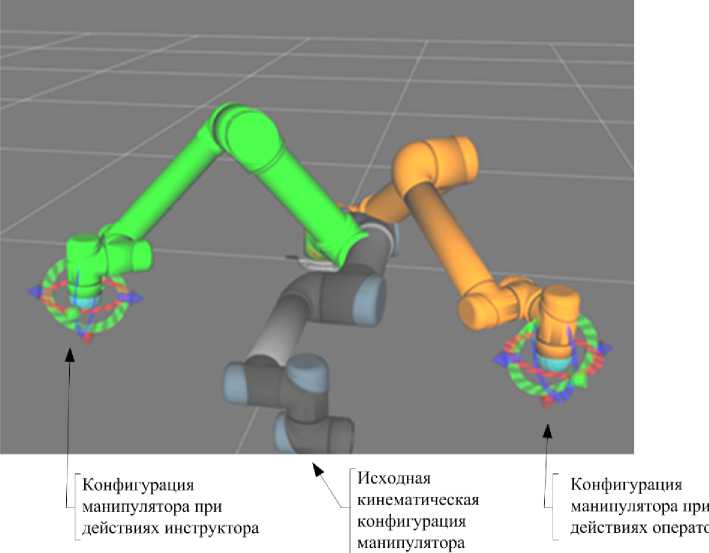
Рис. 13. Анализ действий оператора и инструктора, представленные в виде трехмерной модели манипулятора
Для отображения текущей системной информации в режиме реального времени предложен подход, основанный на распределенной (сетевой) архитектуре с возможностью обмена ROS-сообщениями между узлами сети и использовании веб-браузеров как универсального средства вывода текстовой, табличной и графической информации. Развитие современных информационных технологий и высокоуровневых программных средств представления информации позволяет строить эффективные человеко-машинные системы с учетом специфики восприятия информации определенного типа.
В системе тренажерного обучения в режиме мониторинга действий оператора для визуализации состояния системы используются следующие программные продукты и протоколы (рис. 14):
-
• программный модуль ros-bridge, обеспечивающий обмен сообщениями между инфраструктурой ROS и внешним программным обеспечением, используя TCP-соединение, технологии WebSockets и JSON;
-
• веб-бразуер с поддержкой технологии WebSockets;
-
• язык разметки текстовой и медиаинформации HTML5;
-
• скриптовый язык создания веб-приложений JavaScript (ECMAScript 2018);
-
• протокол текстового обмена сообщениями JSON5.
На рис. 15, 16 приведены примеры окон браузера рабочей станции инструктора, функционирующей в режиме мониторинга действий оператора в режиме реального времени.
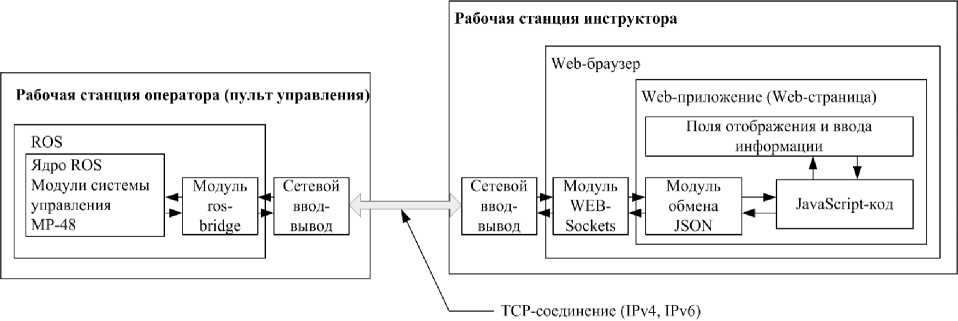
Рис. 14. Структура информационного взаимодействия Web-браузера и системы управления МР-48
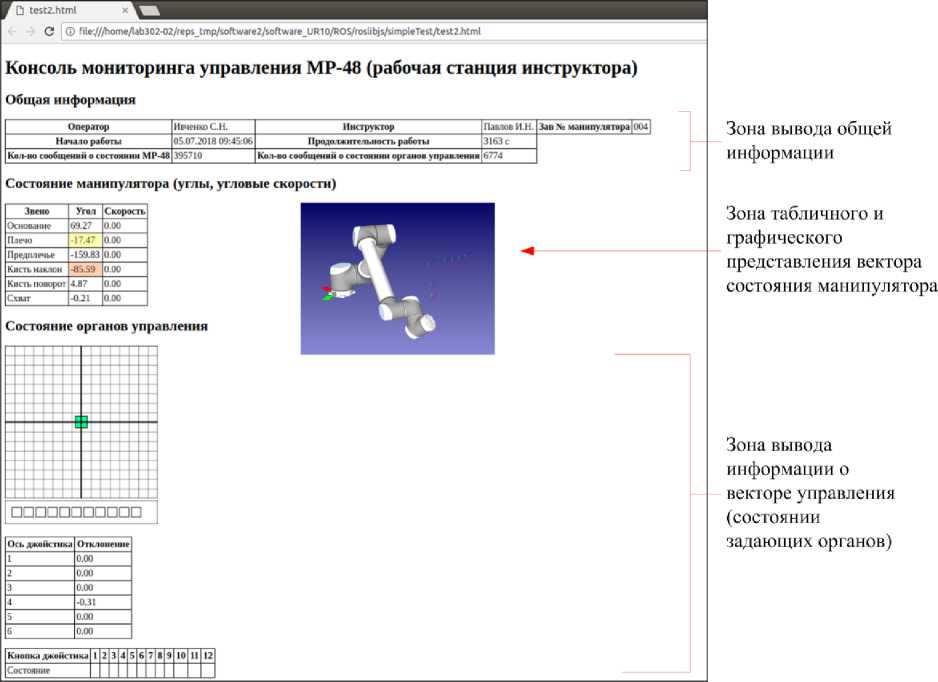
С | О file:///bome/Ub3C2-O2/reps tmp/software2/software UR10/ROS/roslibjs/simpleTestAest2Jitml
Консоль мониторинга управления МР-48 (рабочая станция инструктора)
Общая информация
Зона вывода информации о векторе управления (состоянии задающих органов)
Оператор
Инструктор
Павлов И,Н.
Зав Ne манипулятора |004|
Начало работы
Продолжительность работы
Кол-во сообщении о состоянии МР-48 395710
Зона вывода общей информации
Зона табличного и графического представления вектора состояния манипулятора
Кол-во сообщении о состоянии органов управления
Состояние органов управления
□□□□□□□□□□□
Ось джойстика
Состояние манипулятора (углы, угловые скорости)
Скорость
Предплечье
Кисть поворот
Рис. 15. Общий вид окна браузера рабочей станции инструктора в режиме мониторинга действий оператора
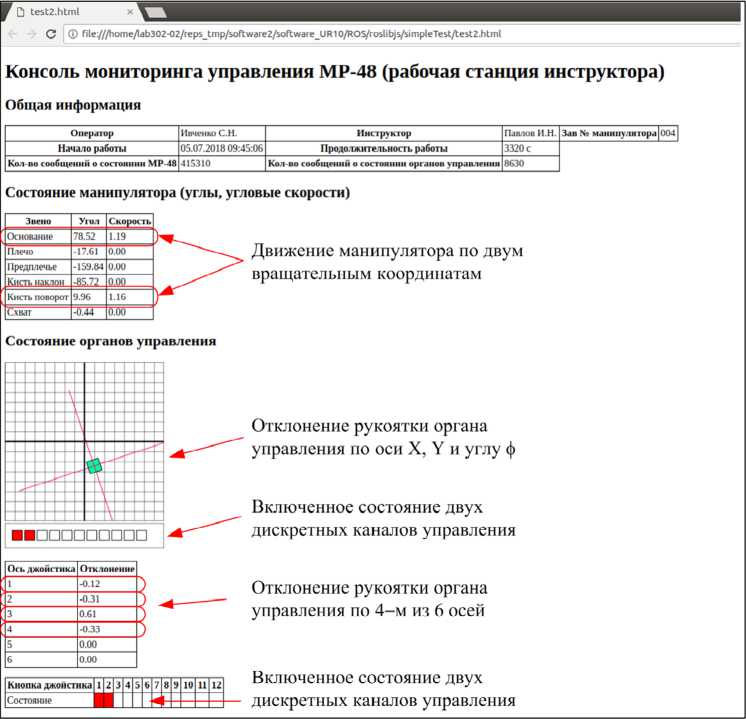
Рис. 16. Пример окна браузера рабочей станции инструктора при воздействии оператора на задающие органы
Заключение
Предложенная система тренажерного обучения позволяет организовать эффективный процесс обучения операторов дистанционно управляемых РТК с цифровыми системами управления. Использование свободно распространяемых программных продуктов (в том числе с открытым исходным кодом) позволяет наращивать функциональные возможности системы, например, осуществлять мониторинг нескольких внутрикамерных или объединенных в технологическую цепочку манипуляторов. Автором предложены: программная архитектура, информационная структура и способы взаимодействия системы управления радиационно стойким манипулятором и подсистемы тренажерного обучения. Разработка, отладка и тестирование системы были выполнены в лабораториях «Робототехника» и «Моделирование динамики движения» филиала ЮУрГУ в г. Миассе.
Список литературы Архитектура тренажерной системы подготовки операторов радиационно стойких манипуляторов
- Юревич, Е.И. Основы робототехники / Е.И. Юревич. - СПб.: БХВ-Петербург, 2005. - 416 с.
- MT 200 TAO Electrically Assisted, Computer-Aided Master-Slave Manipulator. - https://www.lacalhene.com/siteassets/la-calhene/application-products/remote-manipulation/mt200tao/ getingelacalhene_ma200tao_bc_en.pdf (дата обращения: 23.06.2018).
- Пат. 172431 Российская Федерация, F42D5/04. Манипулятор МР-48 для атомной промышленности / И.В. Войнов, И.Ф. Круглов, Б.А. Морозов, А.М. Казанцев, М.В. Носиков. - 2016.
- Радиационно-стойкие манипуляторы и методы расширения их функциональных возможностей / И.В. Войнов, А.М. Казанцев, Б.А. Морозов, М.В. Носиков // «Экстремальная робототехника и конверсионные тенденции»: сб. тр. междунар. науч.-техн. конф. (Санкт-Петербург, ЦНИИ РТК, 7-8 июня 2018). - СПб., 2018. - С. 114-125.
- Voinov, I.V. Automatic and Manual Control Algorithms of Radiation-Proof Manipulators / I.V. Voinov, M.V. Nosikov // Proceedings of 2018 Global Smart Industry Conference, IEEE Xplore. DOI: 10.1109/GloSIC.2018.8570161
- Robot Operationg System (ROS). The Complete Reference (Volume 3) / Anis Koubaa (Ed.). - Springer, 2019. - 605 p. DOI: 10.1007/978-3-319-91590-6
- Lentin Joseph. Mastering ROS for Robotics Programming / Lentin Joseph. - Packt Publishing, 2015. - 481 p.
