Влияние предварительного смещения в зоне контакта на работоспособность подшипников скольжения

Автор: Меновщиков В.А., Щелканов С.И., Кайгородов А.С., Шаронов А.А.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Техника
Статья в выпуске: 6, 2012 года.
Бесплатный доступ
В данной статье излагается теория определения смещения тел в контакте подшипника скольжения с учетом влияния шероховатости поверхностей. Рассматриваются явления в момент, предшествующий началу движения, так называемое предварительное смещение, под которым обычно понимают процессы, происходящие на контакте при переходе к скольжению.
Подшипник скольжения, контакт, предварительное смещение, трение, коэффициент трения, коэффициент жесткости, шероховатость поверхностей, работоспособность
Короткий адрес: https://sciup.org/14082464
IDR: 14082464 | УДК: 621.517,681.142.36
Influence of preliminary displacement in the contact zone on the sliding bearing normal operation
The theory for body displacement determination in the sliding bearing contact taking into account the surface roughness influence is reported in the article. The phenomena in the moment, which goes before the motion start, so-called preliminary displacement, which is usually understood as the processes that occur at the contact in the process of transition to sliding, are considered.
Текст научной статьи Влияние предварительного смещения в зоне контакта на работоспособность подшипников скольжения
Введение. Физическая картина работы цилиндрического подшипника скольжения, несущего радиальную нагрузку, хорошо отображается диаграммой Герси-Штрибека [1, 2]. Диаграмма строится на основе экс- периментальных данных (рис. 1), особый интерес на данной кривой представляет участок (1-2), который соответствует страгиванию вала из состояния покоя. В этой зоне имеет место «сухое трение» со значительным коэффициентом трения, сопровождаемое высокой интенсивностью изнашивания и возможностью возникновения задира или заедания. Началу движения вала во втулке предшествует предварительное смещение в контакте.
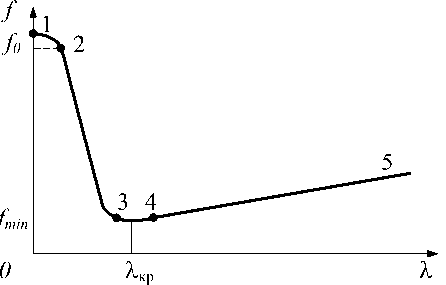
Рис. 1. Диаграмма Герси-Штрибека
Объект исследования. Объектом нашего исследования послужил подшипник скольжения, используемый во многих отраслях промышленного производств.
Цели и задачи исследования. Соприкосновение вала и втулки в подшипнике скольжения можно рассматривать как систему, обладающую определенными физическими свойствами. Изучение свойств этой связи, её формирования и разрушения имеет большое значение для анализа явлений, происходящих в контакте.
Наибольший интерес представляют явления, возникающие на контакте, в момент, предшествующий началу движения, так называемое предварительное смещение, под которым обычно понимают процессы, происходящие на контакте при переходе к скольжению. В данный период времени присутствует граничное трение, наличие как металлического контакта, так и жидкостного.
Если к телу 1 , находящемуся в контакте с телом 2 (рис. 2), приложить сдвигающую силу F , то до начала скольжения появится смещение, равное предварительному смещению A в сторону действия силы F . Значение силы F в области предварительного смещения зависит от силы трения покоя F тр .
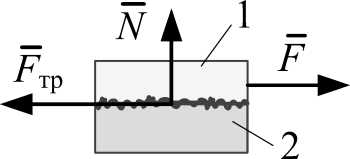
Рис. 2. Контакт шероховатых тел
Закон изменения силы трения в зависимости от перемещения представлен на рисунке 3. При этом в области предварительного смещения сила FF тр . Сила трения на участке ( о – а ), (следуя рис. 3), подчиняется закону
F тр = cx , (1) где c – коэффициент жесткости контактирующих поверхностей [Н/м], x – смещение тела 1 в пределах от 0 до ∆.
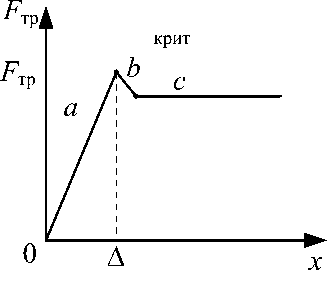
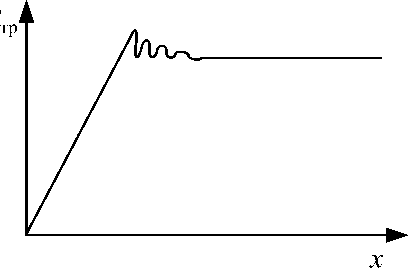
Рис. 3. Закон изменения силы трения в зависимости от перемещения
Дифференциальное уравнение движения тела 1 имеет вид
mx =F - cx.
Преобразуем уравнение (2) к виду
mXdx = F-cx dx.
Интегрируя уравнение (3) при начальных условиях: t= 0 , x 0 = 0 , x 0 = 0 , получим
Fc2 x = 2 x x
mm
Решаем уравнение (4) относительно t
dx
c 2 F 2
x 2 x
mm
.
mc
arcsin 1 x C .
Значение C определим из (5) при соответствующих начальных условиях C
учетом значения постоянной
t
mc arcsin 1 x cF
, тогда с
Используя уравнение (6), выразим перемещение x тела 1 в зависимости от времени
Анализ движения тела 1 показывает, что на участке ( b – c) при FF тр движение подобно зату-
F хающим колебаниям (рис. 3,б). Амплитуда этих колебаний равна A= , т.е. максимальная амплитуда ко- лебаний равна предварительному смещению ∆.
Принимая x = A , из уравнения (7) определим время, за которое произойдет предварительное смещение
t
п . с .

c arccos 1 —л.
.
В формуле (8) подлежат определению коэффициент жесткости c и величина предварительного смещения ∆. Данные параметры зависят от физико-механических свойств контактирующих материалов и геометрии поверхностей (шероховатость, волнистость).
При скольжении контактирующих поверхностей вначале происходит процесс приработки, в результате которого шероховатость поверхностей при дальнейшей эксплуатации остается почти постоянной. Поскольку изменение микрогеометрии поверхности еще недостаточно изучено, то, по-видимому, контакт следует рассматривать при условии сохранения приработочной шероховатости. Следует также отметить тот факт, что после приработки контакт шероховатостей поверхностей будет в основном упругим, в крайнем случае упругопластическим, с преобладанием упругих деформаций. При упругом контакте приложение тангенциальной силы приводит к смещению точки с т к поверхности соприкасающихся тел.
Допустим, что после приработки неровности соприкасающихся поверхностей равновысотны и имеют сферическую форму. Следует отметить, что нагрузка в подшипнике скольжения распределяется в основном по наибольшим контурным площадям, полученным после приработки наиболее выступающих неровностей [3]. Такие неровности деформируются в упругой области и имеют контурные площади контакта ( А с ), изменение площади которых при многократном нагружении не превышает 5 % [4].
Рассмотрим контакт сферических выступов неровностей (рис. 4).
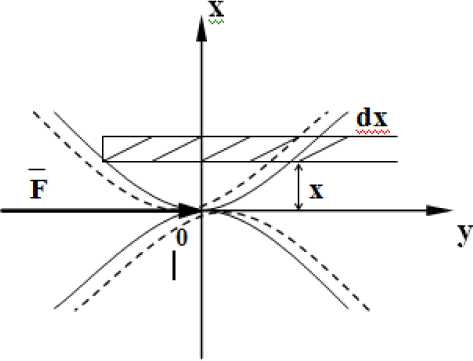
Рис. 4. Расчетная схема
Под действием силы F происходит упругое смещение неровностей в точке O . Для сечения с координатой x смещение y определяется уравнением
E Jzdx2 M(y) ,или E J F y ,
dy dy
2ЕЕ где E – приведенный модуль нормальной упругости, Е = 12;
Е 1 + Е 2
J z – момент инерции, определяемый по формуле [6], J
71-z4
.
Выражая z через R и y , получим
T _ 71 2
J z 4 y 2 R-y
Подставляя выражение (10) в уравнение (9), имеем
.
d 2 x
4F
dy 2 7Г Ey 2 2 R-y 2
Интегрируя уравнение (11), получим
dx
F
F1 ln dy 7CE R2
2R-y
y R 2R-y
+ С 1 .
.
dx
При начальных данных x = 0 , y =R , 00 dy
2F
0 = 0 С 2 F
1 Л ER 2
.
Решая уравнение (12) относительно x , найдем смещение ∆. При y= 0
2 F
A= x =
71 ER .
Вводя в формулу (13) число основных неровностей на контакте по теореме Кастильяно [ 6 ] при n >1, получим
A 1 = x 1
2F
2n 1 ТС ER .
Применяя (14) в уравнении (8) и заменяя c= E S . (здесь S – суммарная контурная площадь), получим
tп.с. 2 arccos
k
2SF
1+----------7tRE 2n-1
.
При этом в формуле (15) P < F, т.е. значение силы P соответствует силе трения в точке b (см. рис. 3), а F будет равной силе трения покоя в точке a .
Сдвигающая сила P может быть определена по формуле [ 5 ]
2 71 a
P = IfTp dpdФ,
где t – напряжение сдвига, определяемое из выражения

причем cd
.
После подстановки (17) в (16) имеем
P f N a3 b3 2 d3 c3
a
где a , b , c , d – параметры сдвигаемых сферических неровностей.
Выводы. Таким образом, первоначальный сдвиг шероховатых поверхностей в основном зависит от коэффициента сцепления неровностей, который в значительной степени определяется микрогеометрией и физико-механическими свойствами контактирующих поверхностей.
