Аспекты математического моделирования процесса оперативной обработки информации в АИС морского торгового порта - ключевого звена экономики

Автор: Панамарева Олеся Николаевна, Панамарев Геннадий Евгеньевич
Журнал: Общество: политика, экономика, право @society-pel
Рубрика: Экономика
Статья в выпуске: 3, 2011 года.
Бесплатный доступ
Освещаются вопросы современного подхода к моделированию информационно- коммуникационных, технико-экономических процессов в морском торговом порту в контексте формирования интегрированных автоматизированных систем управления сложных системных объектов морского транспорта с акцентом на территориальный фактор.
Территориальный фактор, математическое моделирование, информационный, коммуникационный процесс, обстановка, объекты, морской торговый порт, технико- экономическая, коммуникационная система, эффективность
Короткий адрес: https://sciup.org/14931330
IDR: 14931330 | УДК: 338.364:
Aspects of mathematical modeling process of operational processing of information in the AIS commercial sea port - key link of economic
The problems of the modern approach to the modeling of informational and communicational, technical and economic processes in the commercial sea port in the context of formng the integrated automated control systems complex system of sea transport facilities, with emphasis on the territorial factor are highlighted.
Текст научной статьи Аспекты математического моделирования процесса оперативной обработки информации в АИС морского торгового порта - ключевого звена экономики
Территориальный фактор для морских торговых портов (МТП) является одним из ключевых факторов, определяющих и обеспечивающих их конкурентоспособность. Создание и развитие современных автоматизированных систем управления (АСУ) МТП, направленных на формирование единого интеграционного транспортно-коммуникационного и экономического пространства, становится сегодня одной из приоритетных задач [1, 2, 3]. Так как значительно увеличиваются объемы мировых и российских грузопотоков, как экспортных, так и импортных, возникает необходимость получения оперативной, точной, защищенной информации обо всех объектах транспортного процесса. Например, по порту Новороссийск можно отметить, по оценкам аналитиков, рост на протяжении последних 10 лет, в связи с вышеуказанным фактом, только первичного информационного потока [4] из года в год в среднем около 25 %. Морские торговые порты, являющиеся сложными технико-экономическими и информационно-коммуникационными системами одновременно, можно детерминировать с позиций геоинформационной системы. Известно, что геосистема объединяет объекты и регионы пространства, ориентируясь на принцип содержательно- системной целостности на базе единой территориальной принадлежности. При этом модель геосистемы наряду с входящими в нее геообъектами характеризует взаимосвязи между ними, а также пространственно выражает территориальный носитель собственного системного качества. Модели геообъектов и геоситем – структурная основа для формирования функциональных тематических элементов системы геокибернетического моделирования. Весь информационно-коммуникационный процесс на морском транспорте – сложная система с множеством входных и выходных параметров, требующих четкой увязки, контроля, а самое главное, рационального моделирования и реализации модели на практике, что сегодня является особо актуальной и серьезной задачей.
Таким образом, вопросы моделирования информационного процесса в АСУ на морском транспорте (в МТП) с учетом территориального контекста требуют дополнительного изучения. Тем более это касается математического моделирования процесса оперативной обработки информации в морском порту в указанном аспекте, где есть целое поле с множеством неизвестных для исследования.
Итак, обстановка – центральная категория в системе геоинформационной поддержки управления практически каждой сложной технико-экономической системы (рис. 1). На ее базе выполняются все остальные этапы геоинформационного управления – анализ геоситуации, выработка вариантов решения, планирование, реализация решения. При моделировании обстановки с установленной степенью детализации формализуются три базовых аспекта:
-
1) данные о территориальном объекте и своих подсистемах поддержки и обеспечения;
-
2) информация о «негативных» (в том числе – форс-мажорных) факторах в районе;
-
3) параметры и характеристики района взаимодействий объектов сложной системы.
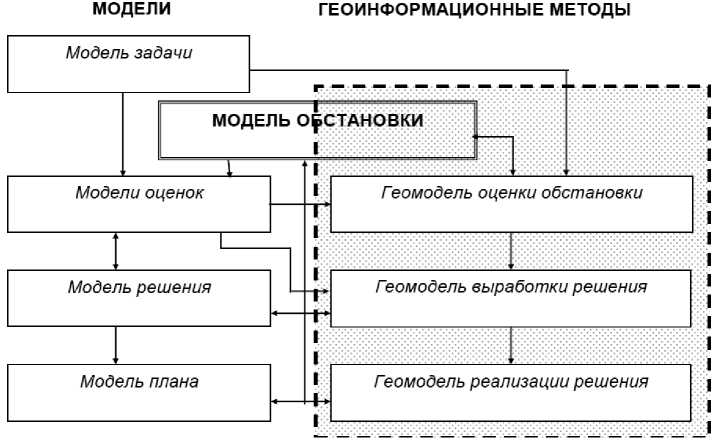
Рис. 1. Концептуальная система процесса геокибернетического моделирования
Она определяет содержание геомодели территориальной обстановки в АСУ МТП, что может быть представлено в следующем виде:
MSit i Maint = { CPFD, EnemD, CADD }, где CPFD – «свои силы»;
EnemD – «противник»;
CADD – район действий функционального территориального объекта (ТО, т. е. – торгового судна, единицы обеспеспечивающего флота, плавсредства, пререгрузочного объекта и т. д.). На рис. 2 показаны объекты ГС морского торгового порта.
Так как отображение обстановки должно в наибольшей степени соответствовать реальной геоситуации, объекты обстановки представляются в геоинформационном пространстве [5, 6, 7]:
Gob sit е GIS .
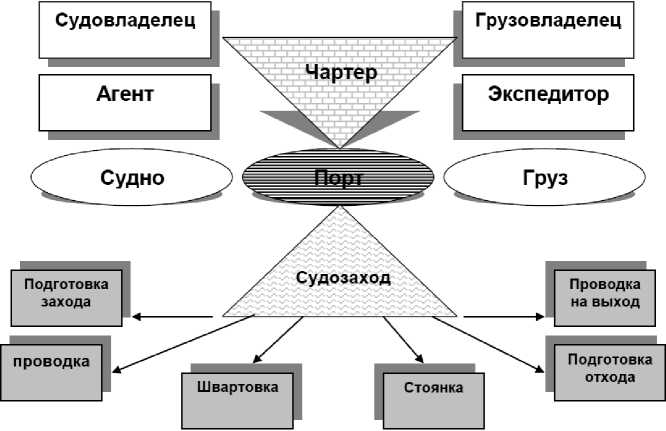
Рис. 2. Система взаимодействия объектов, участвующих в обработке грузопотока в морском торговом порту
Элементы обстановки представляются базовыми структурами геопространства (ГП) GSt (геообъекты, георегионы, геосистемы) и сопровождаются описанием их многомерного пространства признаков ( Descr) :
{ CPFD, EnemD, CADD } с < GStr, Descr >.
Состав модели обстановки определяют модели геоданных:
MSit। cont = (Mp, Mo ), где Mp - цифровая модель поверхности района;
M o - цифровая модель объектов обстановки.
Модель поверхности территориально-морского района включает модели точек и контуров:
M p = { (m t ) k - (m k ) k - P pt - P pk } где ( mt )k - цифровая модель точки поверхности;
(m k ) k - цифровая модель контура поверхности;
P pt , P pk — предикаты (идентификаторы, правила, обозначения, ключевые параметры в реляционных таблицах пространственной базы данных) распределения точек и контуров на поверхности района.
Модель точки поверхности имеет следующий вид:
(mA = < (x,y), Z (h) > ’ где (x,y) - прямоугольные (плоские) координаты точки;
h - параметр (содержательный атрибут) точки;
Z (h) - символьная конструкция, описывающая значение отметки параметра (h):
Z (h) = 0, ( x , y ) с { ( mt ) к , P pk }, где { ( m k ) k . P pk } - контур.
Множество точек ( M t ) k поверхности района ( m t ) k имеет вид:
(Mt) k = { (mt) k , Ppt }.
Модель контура (m^ )k формируется на основе модели точки и включает:
(mt) к = < (У = fi(x)\x G [xn,xk])l ,(У = fj(x)\x G [xn,xk]) 2 ,-■• ...>(У = fr(x)\x G [xn,xk])X >, где y = f(x) - аппроксимирующие функции.
В таблице приведены выражения для модели контура в зависимости от формы представления геоданных объектов ГС - МТП.
Таблица – Формализация модели контура
|
Модель контура |
||
|
Векторная: |
Растровая: |
|
|
M C = т Г Рк = U{ m h } k tk t i j g N t, |
m k = ( Mft , P t i , P t 2 ,..., P tq ) |
|
|
m k P „, = U« m h • m h »j j G N rk |
Pti = < |
1, mt G M tk 0, emt e Mtki , i = 1, 2, ..., q |
|
Nvk = {1, 2, ..., nvk } - вектора контура; mtk и mvk - модели начальной и конечной точек; Рк , P-к - системные параметры контура. |
q - число контуров; Mtk - модели точек контуров; P , системные предикаты - принадлежности точек контуру. |
|
Цифровая модель поверхности исследуемого района ( M p ) представляет набор контуров и точек района, а именно:
M p = ({Q hV , O h 2 -■■■,Q hm }-(M t ) k ) , где O hi - кортежи, описывающие отдельные контуры (горизонтали, изобаты).
Ohi =< Z (hgi ),(У = fi (x)l x G [xn,xk])1 ,(У = fj (x)| x G [xn,xk]) 2 >■■■■■■.(У = fr(x)\x G [xn,xk])n > ,
где Z(hgi) - символьная конструкция, соответствующая значению высоты hgt - контура (горизонтали);
-
У = f (x) - функции и области задания функций, описывающих упорядоченные множества отрезков или дуг цифровых моделей контуров;
-
( Mt )k - множество точек.
Модель объектов обстановки ( Mo ) предствляется как цифровое описание формы и содержательных признаков объекта, а также отношений на множестве объектов перевозочного процесса в МТП:
Mo = (M Fob ,{Ob}, Rob )• где MFob - модель формы объекта;
{ Ob } - множество содержательных признаков (описаний) объектов обстановки - перегрузочно-перевозочного процесса;
Rob - модель отношений между исследуемыми объектами.
Модель формы объекта ( MFOb ) подобно цифровой модели поверхности района описывает положение, контур или поверхность объекта.
Содержание объекта передается через групповые и индивидуальные характеристики его класса, вида и т. д. Данный процесс можно представить в следующей форме:
n l i m j
{ Ob }- UUU Ob i,j,k •
-
i = 1 j = 1 k = 1 где n - число классов объектов;
l - число родов i -го класса;
m j - число видов j -го рода.
Класс - множество объектов, имеющих общий существенный признак и отличающихся от всех других объектов других множеств по различному признаку. При этом общий признак для объектов одного класса выступает одновременно как различительный по отношению к объектам другого класса.
Род - подмножество объектов класса, все объекты которого имеют общий признак, существенный для этого подмножества, и отличаются от объектов других подмножеств класса по различительному признаку.
Вид - подмножество объектов рода, имеющих общий константный признак, существенный для решения конкретного вида задач.
Каждый объект обстановки ( Ob) в отдельности (конкретный географический объект, единичный элемент обстановки, его содержание) представляется в следуещей форме:
a d i
Ob - UU Pj • i=1 j=1
где Р - конкретное дискретное значение признака (атрибута) объекта;
а - общее число признаков в содержании объекта;
dt - число дискретных значений в пределах каждого признака.
Модель признаков ( Р^ ) в этом случае представляется как:
l
Pj-< U рС > • i=1
где РС - содержательный признак объекта, Р С е Sn ;
Sn - многомерное пространство признаков.
Модель отношений между объектами ( Rob ) отображает отношения объектов в
Sn -многомерном пространстве признаков объектов и в Rm -физическом пространстве: Rob = №№}) , где rc - функция, отображающая содержательные отношения между объектами;
г т - функция, отображающая пространственные отношения между объектами. Базовая их схема представлена на рис. 3.
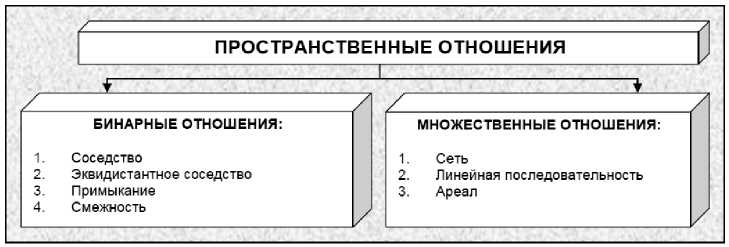
Рис. 3. Пространственные отношения между системными объектами транспортного процесса
Содержательные отношения определяются с помощью методов теории информации, множеств, классификаций и районирования, корреляционного, дисперсионного, факторного, системного и других видов анализа.
Пространственные отношения определяются взаимоотношением контуров или поверхностей объектов транспортного процесса:
Г = f( rt, rcэ, rcГ ) -c cc c t где rc - отношения, отображающие место объекта в содержательно-таксономическом ряду;
э rc - отношения между элементами составного объекта; Г r - групповые отношения (группировки).
r т = f (о, с, <, ^, и, p v 0 = {0, 1}), где о - пересечение;
с - вложение;
-
< - упорядочение;
^ - ориентирование;
и - наложение;
p v 0 = 0 - примыкание;
как дизъюнкция двух высказываний.
p v 0 = 1 - соседство,
Структура модели исследуемой обстановки представляет иерархическую систему цифровых моделей природных, социальных и экономических компонентов. Поэтому выражение цифровой модели обстановки ( т ^ ) на i -м иерархическом уровне обобщения принимает вид:
mi= {(Mi-1 Mi-1 ⊂Mi),(Pi-1
e e e e sc i-1 i sc sc ,
где Me – модели элементов обстановки;
P – системные параметры модели (отношения);
i – иерархический уровень модели (обобщения).
Данное выражение – совокупность некоторых множеств с заданными в нем бинарными отношениями; поэтому может рассматриваться как граф. Таким образом, модель обстановки представляется в виде ориентированного графа – дерева целей, где корень – модель обстановки, а вершины – цифровые модели элементов и системные параметры соответствующих уровней обобщения.
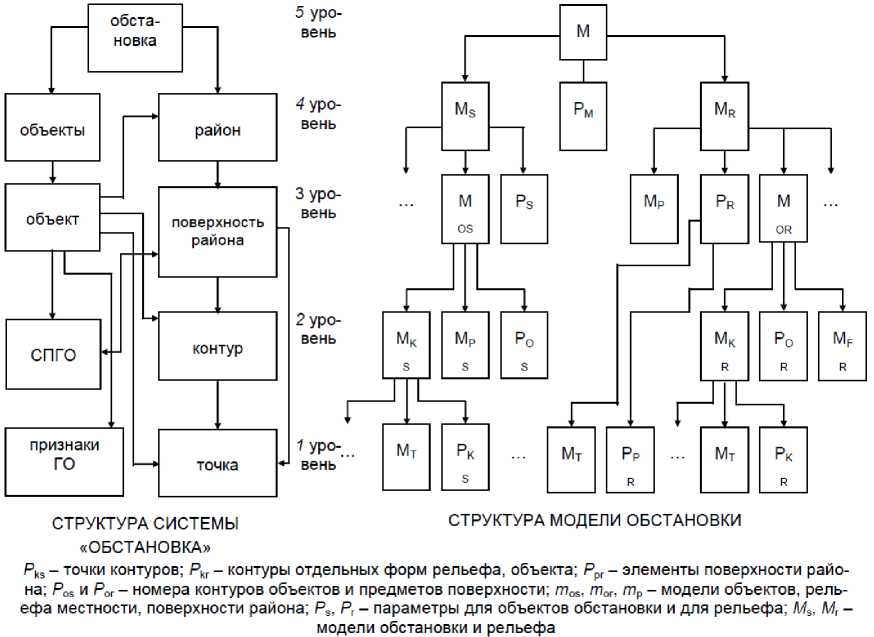
Рис. 4. Структура обстановки
Структура обстановки в сочетании с принимаемой при этом структурой системы «обстановка» включает следующие компоненты и уровни, что показано на рис. 4.
Первый уровень иерархии – элементарные неделимые информационные части моделей сложного пространственного объекта и пространственной поверхности – модели точек ( mt ) и контуров ( mk ).
Структурная целостность модели на указанном уровне задается совокупностью системных параметров, указывающих на геометрическую структуру контуров объектов района ( P ks ), контуров отдельных форм рельефа ( P kr ) или поверхности ( P pr ). Эти системные параметры – символьные коды, обозначающие характер связей точек в контуре (последовательность соединения, форму связи, геометрический вид, точность идентификации)
или характер расположения точек на ЗП (в характерных местах, по регулярной сетке, по профилям, по нерегулярной сетке и т. д.).
Второй уровень модели – это совокупность цифровых моделей контуров ( m ) и отдельных форм рельефа ( mfr ), цифровых моделей контуров ( m ks ) и поверхностей ( m ) самих объектов, а также системных параметров, определяющих соответствие контуров объектам ( P os ) и формам рельефа ( P or ). В качестве системных параметров P os и P or принимаются номера контуров объектов и предметов поверхности в соответствии с используемой системой идентификации УЗ или картографических элементов (кодификаторы, классификаторы).
Третий уровень модели включает цифровые модели объектов ( m os ) и рельефа местности ( m or ), модели поверхности района ( m p ) и объединяющие их параметры P s (для объектов обстановки) и P r (для рельефа). В качестве этих параметров выступают символьные коды, идентифицирующие объекты обстановки в соответствии с принятой системой обозначений (например, порядковые номера или координаты центра тяжести контуров).
Четвертый уровень иерархии составляют цифровые модели обстановки ( M s ) и рельефа ( M r ). Объединение их в соответствии с системными параметрами P m (единая система координат, одинаковая степень генерализации, временной диапазон и территориальный охват и др.) образует последний пятый уровень – саму модель обстановки.
Таким образом, модель обстановки – инвариант остальным моделям информационного обмена при осуществлении транспортного процесса, так как по своему составу и структуре может быть преобразована в другие формальные представления категорий управления на экономическом, социальном, финансовом и других уровнях. Особенно это касается процесса моделирования автоматизированного документооборота и в целом автоматизированной системы управления на морском транспорте.
Ссылки:
-
1. Панамарева О.Н. Информационные технологии 1.
-
2. Иванова С.Е., Панамарева О.Н. Повышение 2.
-
3. Попов В.В. Развитие и безопасность южных3.
-
4. Панамарева О.Н. Указ. соч.4.
-
5. Байсеркеев О.Н., Бургоменко В.Н. Региональ-5.
-
6. Биденко С.И., Самотонин Д.Н., Яшин А.И.6.
-
7. Дьяконов К.Н., Касимов Н.С., Тикунов В.С.7.
в управлении морскими портами // Материалы IV Международной научно-методической конференции «Современный российский менеджмент: состояние, проблемы, развитие» : сб. статей. Пенза, 2005.
эффективности работы морского порта путем использования информационных технологий // Известия высших учебных заведений. СевероКавказский регион. Проблемы водного транспорта. Спецвыпуск. Ч. II. Технические науки.
Ростов н/Д, 2006.
портов России : учеб. пособие. М., 2003.
ная предметно-пространственная среда. Алматы, 1993.
Геоинформационные модели и методы поддержки управления. СПб., 2003.
Современные методы географических исследований. М., 1996.
Список литературы Аспекты математического моделирования процесса оперативной обработки информации в АИС морского торгового порта - ключевого звена экономики
- Панамарева О.Н. Информационные технологии в управлении морскими портами//Материалы IV Международной научно-методической конференции «Современный российский менеджмент: состояние, проблемы, развитие»: сб. статей. Пенза, 2005.
- Иванова С.Е., Панамарева О.Н. Повышение эффективности работы морского порта путем использования информационных технологий//Известия высших учебных заведений. СевероКавказский регион. Проблемы водного транспорта. Спецвыпуск. Ч. II. Технические науки. Ростов н/Д, 2006.
- Попов В.В. Развитие и безопасность южных портов России: учеб. пособие. М., 2003.
- Панамарева О.Н. Указ. соч.
- Байсеркеев О.Н., Бургоменко В.Н. Региональная предметно-пространственная среда. Алматы, 1993.
- Биденко С.И., Самотонин Д.Н., Яшин А.И. Геоинформационные модели и методы поддержки управления. СПб., 2003.
- Дьяконов К.Н., Касимов Н.С., Тикунов В.С. Современные методы географических исследований. М., 1996.
