Аварийное спасение экипажа пилотируемого транспортного корабля "Союз" на участке выведения (к истории создания уникальной космической техники)
")
Автор: Хамиц Игорь Игоревич, Лебедев Геннадий Васильевич, Овчинников Александр Геннадьевич, Хомяков Михаил Кимович, Овсянникова Наталья Юрьевна, Евсеенко Ольга Владимировна
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: К истории создания уникальных космической техники и технологий
Статья в выпуске: 2 (29), 2020 года.
Бесплатный доступ
Статья посвящена созданию средств аварийного спасения экипажа космического корабля «Союз» при выведении на орбиту, содержит краткие материалы о научноисследовательских, проектных, конструкторских и экспериментальных работах, выполненных специалистами РКК «Энергия» (ранее ОКБ-1), ЦНИИмаш (ранее НИИ-88), ЦАГИ и многих других предприятий-участников при разработке средств аварийного спасения. В статье рассмотрены компоновочные решения по отделяемому головному блоку, алгоритмы работы системы аварийного спасения, представлены результаты моделирования движения отделяемого головного блока и структурных частей корабля в случае аварии носителя, приведены краткие результаты анализа реальных случаев аварийного спасения экипажа, включая аварию ракеты-носителя «Союз-ФГ» 11 октября 2018 г.
Спускаемый аппарат, отделяемый головной блок, система аварийного спасения, средства отделения
Короткий адрес: https://sciup.org/143177925
IDR: 143177925 | УДК: 629.78.067.8.085(091)(470) | DOI: 10.33950/spacetech-2308-7625-2020-2-115-129
Emergency recovery of the crew of the manned transportation spacecraft Soyuz during ascent to orbit (towards a history of development of the unique space hardware)
The paper is dedicated to the development of the equipment for emergency recovery of the Soyuz spacecraft crew during ascent to orbit, and contains a summary of research, engineering, design and experimental studies, carried out by specialists of RSC Energia (formerly OKB-1), TsNIIMash (formerly NII-88), TsAGI and many other companies that were involved in the development of the emergency crew rescue equipment. The paper discusses layout arrangements for the emergency escape nose section, algorithms for the operation of the emergency rescue system, provides results of simulations of the motion of the emergency escape nose section and structural parts of the spacecraft in case of the launch vehicle failure, provides brief results of the analysis of actual cases of emergency crew rescue, including the failure of Soyuz-FG launch vehicle on October 11, 2018.
Текст научной статьи Аварийное спасение экипажа пилотируемого транспортного корабля "Союз" на участке выведения (к истории создания уникальной космической техники)
ХАМИЦ И.И.

ЛЕБЕДЕВ Г.В.
ОВЧИННИКОВ А.Г.

ХОМЯКОВ М.К.

ОВСЯННИКОВА Н.Ю.

ЕВСЕЕНКО О.В.
История создания средств аварийного спасения
В 1961 г. начались научно-технические и проектные исследования по пилотируемым кораблям следующего поколения. В период 1961–63 гг. были определены основные проектные решения по кораблю 7К для облета Луны в составе комплекса (7К — корабль; 9К — разгонный блок; 11К — танкер для заправки 9К). Эти работы включали выбор способов и средств аварийного спасения экипажа на участке выведения [1].
Проектно-компоновочные работы и исследования по аварийному спасению экипажа проводились по следующим направлениям [1, 2]:
-
1. Выбор способа аварийного спасения, а именно: применение отделяемого головного блока (ОГБ) или катапультирование экипажа. На этом этапе были выполнены проектные исследования по анализу эффективности сравниваемых способов спасения и их влиянию на характеристики корабля; два варианта компоновки были рассмотрены и отработаны на двух полноразмерных макетах спускаемого аппарата (СА): в первом варианте применялись две парашютные системы (основная и запасная); во втором — одна парашютная система и три катапультных кресла. По результатам сравнительного анализа был выбран вариант СА с двумя парашютными системами и, соответственно, способ спасения «применение ОГБ».
-
2. Выбор компоновки ОГБ: аэродинамически устойчивая или нейтральная схема с учетом задней центровки ОГБ из-за расположения СА. Эти проработки проводились на фоне анализа предложенной Летно-испытательным институтом Министерства авиационной промышленности нейтральной компоновки ОГБ с разворотом в полете (подтвержденной натурным экспериментом с полноразмерным макетом СА). В итоге на основе проектно-баллистических исследований была принята разработанная ОКБ-1 статически устойчивая компоновка с применением складываемых решетчатых стабилизаторов, так как в этом случае было исключено возникновение больших поперечных перегрузок на экипаж и конструкцию при полете ОГБ.
-
3. Аэрогазодинамические исследования по выбору оптимальных внешних обводов
-
4. Проработки по конструкции и механизмам уводимой части головного обтекателя (ГО), по сопряжению уводимых отсеков корабля с ГО (проводимые с участием специалистов Куйбышевского филиала ОКБ-1).
-
5. Определение параметров аварийности и расчетных моделей аварии ракеты-носителя (РН).
-
6. Определение приборного состава и характеристик автоматики системы аварийного спасения (АСАС), проработки по сопряжению с системой управления (СУ) РН.
-
7. Определение характеристик твердотопливных двигателей в составе ОГБ, выбор и привлечение к работам смежных организаций-разработчиков: ОКБ завода № 81 (ныне МКБ «Искра» им. И.И. Картукова) и НИИ-125 (ныне ФЦДТ «Союз»).
-
8. Формирование методики и программы автономных, комплексных и межведомственных испытаний ОГБ и СА, системы приземления СА, бортовых систем корабля, участвующих в процессе аварийного спасения.
ОГБ, средств аэродинамической стабилизации и по влиянию струй ракетных двигателей твердого топлива (РДТТ) на характеристики ОГБ (с большим объемом аэродинамических исследований на моделях ОГБ в аэродинамических трубах).
Несколько слов об организации этих работ в ОКБ-1 на этапе поисковых исследований и выпуска проектной документации [1, 3]:
-
• отдел 9 (начальник отдела М.К. Тихонравов) — проектирование корабля в целом (компоновка — В.Н. Бобков, В.В. Молодцов, А.Н. Максименко, состав и взаимодействие бортовых систем, программа полета — К.С. Шустин, А.А. Горшков, В.Е. Любинский, Э.К. Демченко) проводилось под руководством К.П. Феоктистова;
-
• отдел 11 (начальник отдела В.Ф. Рощин) — проектирование СА и ОГБ проводилось под руководством А.Г. Решетина: по СА (В.А. Тимченко, В.Е. Миненко, В.А. Леонов, Б.С. Шиманский); по ОГБ (Л.А. Волгин, Г.В. Лебедев); по системе приземления СА (Л.А. Волгин, В.А. Овсянников, Е.П. Уткин, Н.А. Петров); исследования по аэрогазодинамике, баллистике, нагрузкам, нагреву и теплозащите СА и ОГБ (В.Д. Осипов, Н.В. Гречко, Е.А. Тюлин,
Г.А. Долгополов, Л.К. Лещенко, Б.П. Плотников, Ю.П. Балашов); по методике экспериментальной отработки СА и ОГБ (В.А. Тимченко, Л.А. Волгин);
-
• отдел 3 (начальник отдела Я.П. Ко-ляко) — проектные работы с участием специалистов Куйбышевского филиала ОКБ-1 по конструкции и механизмам головного обтекателя (П.И. Ермолаев, И.П. Фирсов, В.И. Трофимов, В.Н. Новиков, А.Г. Ендуткин), по средствам отделения корабля от РН и по динамике процессов разделения (С.Ф. Пармузин, В.В. Кокушкин, Н.К. Петров); в дальнейшем все эти работы были полностью переданы в Куйбышевский филиал (Г.Е. Фомин, В.С. Савинов, Г.П. Житин);
-
• отдел 5 (начальник отдела И.Е. Юрасов) — разработка АСАС, определение взаимодействия системы управления РН и АСАС (Б.М. Пенек, В.И. Бурячко, А.Г. Когутенко, Ю.А. Тимченко, О.М. Юдина);
-
• общее руководство осуществлял заместитель главного конструктора К.Д. Бушуев, включая взаимодействие между отделами и со смежными предприятиями.
В 1964 г. основные проектные работы по лунным вариантам пилотируемых кораблей были сосредоточены в отделе 93 (начальник — И.С. Прудников), в который были переведены проектанты из отделов 9 и 11, заместителями начальника отдела были назначены К.П. Феоктистов и В.А. Тимченко. Одновременно проводились проработки по выбору первого этапа работ по кораблю 7К.
В начале 1965 г. С.П. Королёв выступает на НТС Государственного комитета оборонной техники [4] с новой программой работ по кораблю 7К — курсом на отработку стыковки двух кораблей на околоземной орбите. Затем был выпущен эскизный проект, корабль получил название «Союз», обозначение 7К-ОК (индекс 11Ф615).
После выпуска эскизного проекта большая часть проектантов временно, на один год, была переведена в конструкторские отделы для выпуска рабочей документации. В течение 1965–66 гг. была выпущена рабочая документация, начато изготовление макетных и летных образцов корабля, выполнен большой объем наземной отработки.
Особое внимание было обращено на формирование программы комплексных и межведомственных испытаний ОГБ и СА, системы приземления СА, бортовых систем корабля, участвующих в процессе аварийного спасения (Я.И. Трегуб, П.В. Цыбин, А.Г. Решетин, В.А. Тимченко, А.И. Яцушко, Б.И. Смирнов).
Первоначально (с учетом зарубежного опыта аналогичных испытаний по программам «Меркурий» и «Аполлон») планировалось проведение испытаний в трех наиболее тяжелых расчетных случаях:
-
• авария на стартовом комплексе (СК);
-
• авария на начальном участке полета РН (имитация случая потери устойчивости и управляемости РН);
-
• авария в зоне максимальных скоростных напоров.
Первые два расчетных случая были реализованы при испытаниях полноразмерных экспериментальных изделий Э1498. Первое испытание Э1498 (рис. 1) было проведено в начале декабря 1966 г. При анализе результатов испытаний было установлено, что при воздействии струй центрального ракетного двигателя (ЦРД) из-за возникновения резонансных колебаний была разрушена обшивка цилиндрической части ГО (на длине ~700 мм), одновременно внутри ГО из-за затекания струй произошло возгорание внутренней теплоизоляции ГО и повреждение бортовой кабельной сети АСАС. Для устранения этих замечаний были проведены соответствующие доработки, в первую очередь на цилиндрическую часть ГО была нанесена теплозащита, которая изменила собственные частоты колебаний конструкции и устранила возникновение резонанса, затем были реализованы противопожарные мероприятия на ОГБ.
14 декабря 1966 г. планировался запуск космического корабля «Союз 7К-ОК №2» (в беспилотном варианте). На заключительном этапе предстартовой подготовки в момент запуска двигателей носителя произошло их аварийное выключение, и с РН было снято электропитание, но электропитание корабля не было выключено. Через ~7 мин после этого был выработан ложный сигнал «Авария» из-за ошибок в схеме сопряжения АСАС и СУ РН. Отделение ОГБ произошло до сведения ферм, ОГБ был уведен от РН, затем в заданное время от ОГБ отделился СА и приземлился на безопасном расстоянии от СК [1].
На приборно-агрегатном отсеке (ПАО) корабля из-за воздействия струй ЦРД в условиях пролива охлаждающей жидкости
(изооктан) системы терморегулирования при расстыковке гидроразъемов при работе пиросредств разделения СА–ПАО и аварийного стыка ГО произошло местное возгорание. Огонь распространился на топливные баки носителя, что привело к пожару и взрыву РН.

а)

б)
Рис. 1. Первое испытание экспериментальной установки Э1498: а — Э1498 на стартовой площадке; б — начальный этап полета отделяемого головного блока (ОГБ) Э1498; 1 — ОГБ; 2 — часть головного блока, остающаяся на стартовой площадке; 3 — струи управляющего двигателя; 4 — струи основного двигателя
По результатам анализа была установлена причина выработки ложной команды «Авария» и проведена серия доработок: реализовано проектное требование по блокированию параметров аварийности РН до прохождения команды «Контакт подъема»; для взведения и отбоя САС и систем корабля введены транзитные цепи на РН (минуя кабель-мачту), внедрены самозапирающиеся клапаны на трубопроводах системы терморегулирования, установлены огнетушители на головном обтекателе, и введена противопожарная защита приборов и бортовой кабельной сети автоматики САС.
Указанные доработки были проверены при втором пуске экспериментальной установки Э1498 12 апреля 1967 г. с положительным результатом. Позже, начиная с корабля с заводским № 8, проведена замена охлаждающей жидкости на антифриз.
Для реализации третьего расчетного случая испытаний САС (при максимальных скоростных напорах) планировалось выведение головного блока корабля «Союз» с помощью межконтинентальной баллистической ракеты (МБР) 8К71, снимаемой в тот период с вооружения. Предварительные проработки показали высокую стоимость подобного эксперимента, и принятие решения по этому вопросу затягивалось. Окончательное решение было принято в 1967 г., когда ОГБ корабля 7К-Л1 (для облета Луны) обеспечил спасение СА при аварии РН «Протон» в зоне максимального скоростного напора [5]. Поскольку ОГБ кораблей «Союз» и Л1 разрабатывались на единых технических принципах, было принято решение отказаться от испытаний ОГБ корабля «Союз» на режиме максимального скоростного напора.
В период с 1968 г. и до настоящего времени корабль «Союз» и средства его выведения прошли несколько модернизаций [1, 5]. Модернизация проходила по двум направлениям:
-
• модернизация РН с целью увеличения выводимой массы корабля;
-
• модернизация корабля с целью улучшения его характеристик, повышения надежности и безопасности.
Оба направления привели к увеличению массы уводимых в составе ОГБ отсеков корабля (на 25%) и, соответственно, к необходимости увеличения энергетических характеристик твердотопливных двигателей аварийного спасения.
Основные направления модернизации периода 1972–83 гг.:
-
• введен ранний сброс двигательной установки системы аварийного спасения (ДУ САС) с целью увеличения выводимой массы корабля;
-
• введена новая программа (1А) аварийного спасения на участке полета от момента отделения ДУ САС до сброса ГО;
-
• уточнено значение тротилового эквивалента при взрыве РН и параметры
опасной зоны по воздействию ударной волны на уводимые отсеки корабля [2];
-
• изменен состав, и улучшены характеристики РДТТ аварийного спасения;
-
• исключено воздействие струй ЦРД ДУ САС на решетчатые стабилизаторы за счет перехода на сопловой блок с четырьмя основными соплами;
-
• введена «ветровая» логика управления полетом ОГБ (включение управляющих ракетных двигателей (УРД)) с целью уменьшения вероятности посадки СА в опасной зоне и зоне стартовых сооружений;
-
• модернизированы приборы автоматики САС.
Последняя модернизация ОГБ была выполнена в 1983 г. (серия кораблей 7К-СТ с № 51), изменения прошли комплексную экспериментальную отработку на четырех полноразмерных макетах ОГБ:
-
• на экспериментальной установке ЭУ-304 на огневом стенде НИИ «Геодезия» (г. Красноармейск) проверяли воздействие струй ЦРД ДУ САС на конструкцию ОГБ (в частности, состояние решетчатых стабилизаторов, достаточность противопожарных мероприятий);
-
• летные испытания ОГБ по программе 1А (ЭУ-81.1);
-
• летные испытания ОГБ, СА и системы приземления по программе 1 (ЭУ-81.2 и ЭУ-81.3).
В итоге, работы по аварийному спасению экипажа пришли к своему окончательному становлению и были применены на последующих модификациях корабля «Союз ТМ», «Союз ТМА», а в настоящее время — на кораблях «Союз МС».
Параллельно с работами по орбитальным кораблям «Союз» в РКК «Энергия» (в то время ЦКБЭМ) проводились работы по кораблям для облета Луны 7К-Л1 и лунной экспедиции 7К-ЛОК. В работах по аварийному спасению экипажа широко использовался опыт работ по орбитальным кораблям «Союз». Как правило, работы по трем темам проводились параллельно.
Особо следует остановиться на реализации программы Л1, в которой для выведения лунного блока использовалась новая РН «Протон». Из 12 пусков комплекса пять пусков закончились авариями на участке выведения, в которых было обеспечено возвращение на Землю СА, и таким образом был проверен процесс аварийного спасения во всех основных режимах. С учетом неблагоприятных результатов летных испытаний программа Л1–«Протон» была закрыта без проведения пилотируемых пусков [5, 6].
Неудачная попытка реализации программы Л1 показывает, что при выборе программы летных испытаний новых (или модернизированных) пилотируемых кораблей необходимо учитывать подтвержденную надежность РН к моменту первых запусков кораблей.
Опыт работ по программам «Союз», Л1 и Л3 был использован при создании многоразового ракетно-космического комплекса «Энергия – Буран» [1]. На проектном этапе были проведены широкие исследования по выбору способов и средств аварийного спасения экипажа и корабля на участке выведения, при этом с учетом ограниченного количества создаваемых многоразовых орбитальных кораблей (ОК) задача его спасения была одной из приоритетных. Были рассмотрены следующие способы спасения:
-
• продолжение полета РН по нештатной схеме (маневр возврата или выведение на одновитковую траекторию) при отказе одного из двигателей;
-
• спасение ОК на участке работы 1-ой ступени РН с помощью твердотопливных ускорителей (на базе первой ступени МБР «Тополь»);
-
• применение различных вариантов отделяемой кабины ОК;
-
• применение средств экстренного отделения ОК при авариях на внеатмосферных участках полета;
-
• применение катапультирования экипажа [7].
В итоге были приняты следующие способы спасения ОК и экипажа:
-
• продолжение полета РН по нештатной схеме при отказе одного из двигателей;
-
• применение средств экстренного отделения ОК при авариях на внеатмосферных участках полета;
-
• применение катапультирования экипажа.
Средства аварийного спасения экипажа корабля «Союз МС»
Контроль ситуаций, угрожающих безопасности экипажа, начинается с момента взведения САС (за ~30 мин до намеченного времени старта) и продолжается в течение всего активного участка траектории выведения корабля. По результатам контроля может быть принято решение о досрочном прекращении полета РН при поступлении аварийных сигналов: от СУ РН; от датчиков продольных перегрузок автоматики САС; по командной радиолинии корабля.
Траектория выведения корабля «Союз» разбита на четыре участка (рис. 2), которые отличаются составом ОГБ и программой работы средств спасения.
Состав средств, обеспечивающих аварийное спасение экипажа. В состав САС входят:
-
• двигательная установка системы аварийного спасения (ДУ САС) 855М, предназначенная для отделения и увода ОГБ1 от аварийной РН;
-
• ракетные двигатели аварийного разделения на головном обтекателе (РДГ) 860М, предназначенные для отделения и увода ОГБ1А от аварийной РН при авариях на участке полета от сброса ДУ САС до сброса ГО;
-
• АСАС (приборы и оборудование АСАС размещаются на ГО и в БО корабля);
-
• системы и агрегаты, расположенные на ГО сборочно-защитного блока и управляемые АСАС, в частности:
– решетчатые стабилизаторы с механизмами раскрытия, предназначенные для обеспечения аэродинамической стабилизации ОГБ;
– опорные ложементы СА (с механизмами фиксации), предназначенные для обеспечения силовой связи уводимых отсеков корабля с ГО;
– средства разделения аварийного стыка ГО;
– средства пожаротушения ГО.
В процессе штатного сброса ДУ САС и ГО применяются следующие системы и агрегаты, расположенные на ГО и управляемые по командам автоматики САС:
-
• средства отделения ДУ САС от ГО;
-
• двигатели сброса створок ГО;
-
• механизмы раскрытия продольного стыка ГО;
-
• механизмы раскрытия поперечного стыка ГО.
В процессе аварийного спасения работает ряд штатных систем и механизмов РН и корабля:
-
• системы РН:
– система управления РН;
– средства отделения корабля от III ступени РН;
-
• системы и агрегаты корабля:
– система управления бортовым
комплексом (СУБК);
– система управления движением и навигации (СУДН);
– комплексная радиосистема;
– средства приземления;
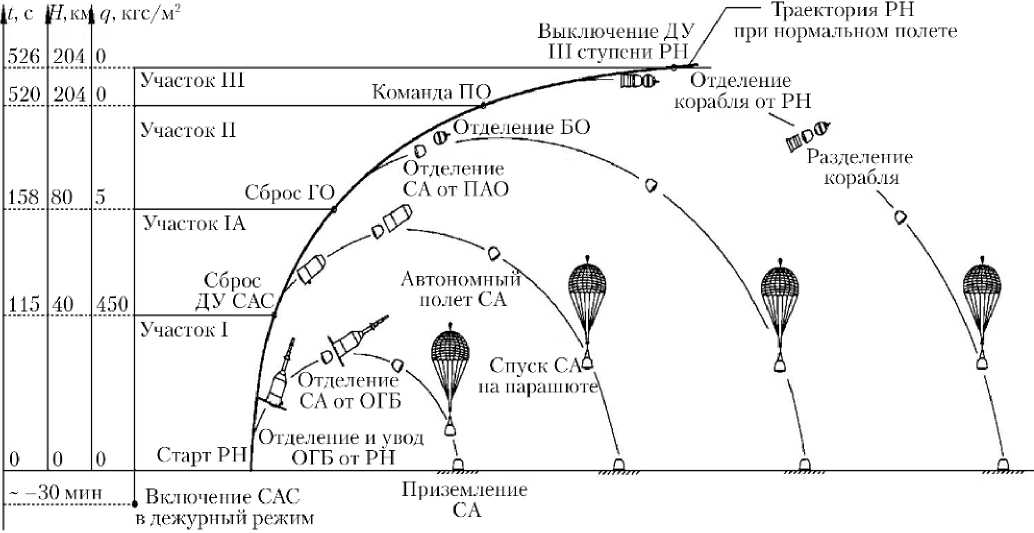
Рис. 2. Схема аварийного спасения экипажа при выведении корабля «Союз»:
участок I (программа 1): отделение и увод отсеков корабля (СА+БО) в составе ОГБ1 (рис. 3, а) с помощью ДУ САС и РДГ;
участок IА (программа 1А): отделение и увод отсеков корабля (СА+БО) в составе ОГБ1А (рис. 3, б) с помощью РДГ;
участок II (программа 2): последовательное отделение БО и СА с помощью штатных средств разделения корабля;
участок III (программа 3): отделение корабля от РН с помощью штатных средств
Примечание. t — время полета, с; Н — высота полета, км; q — скоростной напор, кгс/м2. Сокращения см. в тексте.
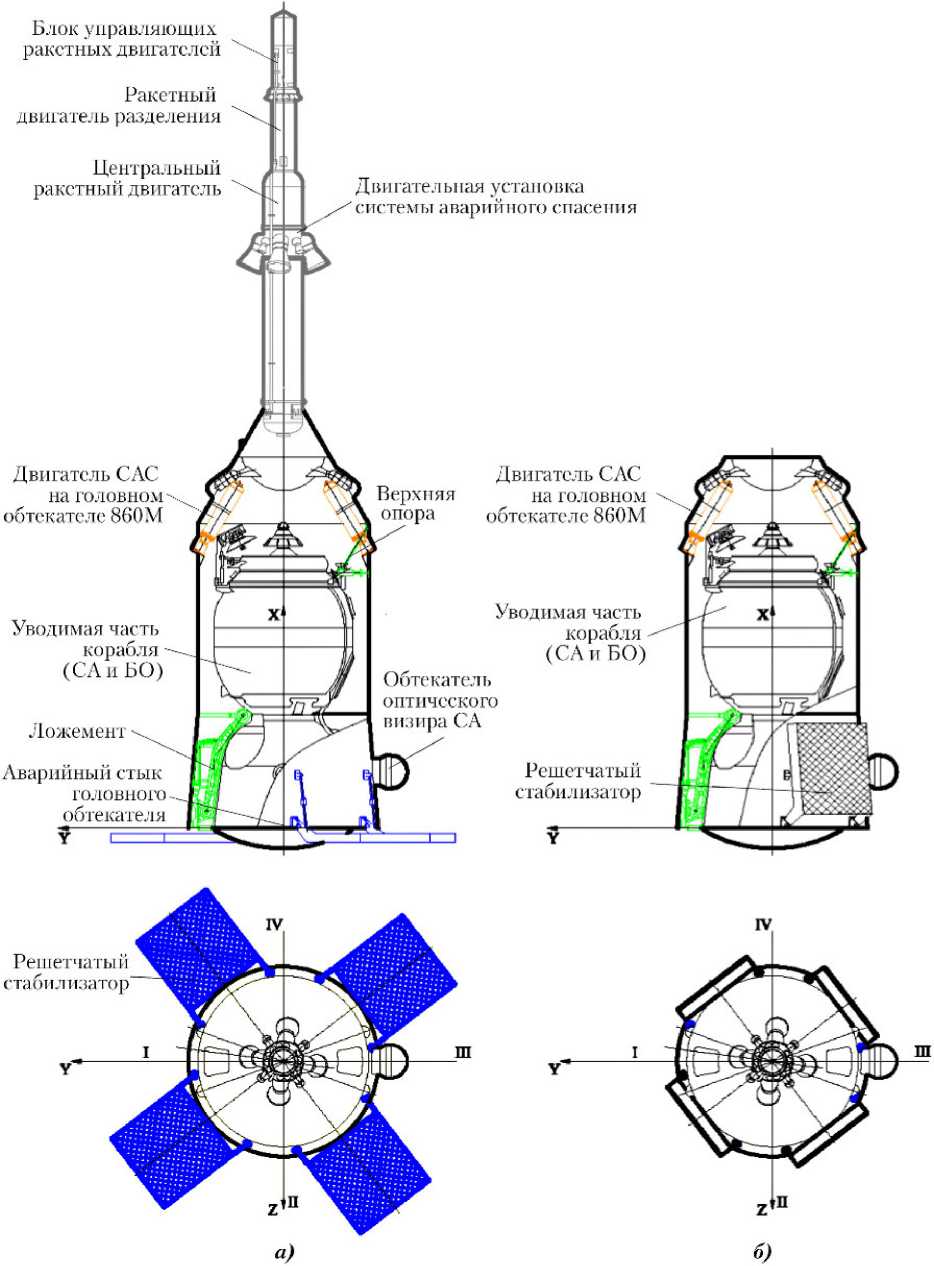
Рис. 3. Компоновочные схемы отделяемого головного блока: а
— при работе по программе 1 (ОГБ 1); б — при работе по программе 1А (ОГБ 1А);
– система электроснабжения;
– система исполнительных органов спуска;
– система бортовых измерений;
– средства разделения СА–ПАО, СА–БО;
– средства отделения гермоплаты СА и разделения кабеля БО–СА.
Программа 1. Рассмотрим процесс аварийного спасения экипажа корабля «Союз МС» по программе 1, которая применяется от момента включения САС в дежурный режим на стартовом комплексе (СК) до сброса ДУ САС (~114 с полета).
Задействование средств спасения экипажа при аварии РН на старте (до прохождения команды «контакт подъема») осуществляется по решению двух специалистов — руководителя пуска и технического руководителя по РН, которые находятся в бункере, в непосредственной близости от старта, наблюдают за ходом подготовки и стартом РН через перископы. Они выдают голосовую пароль-команду «Авария» по линиям связи операторам командной радиолинии, затем команда «Авария» передается по радиоканалу на борт корабля. После старта РН основным источником формирования команды «Авария» является система управления РН.
Программа 1 имеет два варианта функционирования.
Первый вариант — авария в период времени от включения САС в дежурный режим на СК до снятия блокировки на выдачу команды «аварийное выключение ДУ» (АВДУ) РН (до 20 с полета). В этом варианте основные задачи полета ОГБ1:
-
• обеспечение высоты полета СА, достаточной для функционирования системы приземления;
-
• обеспечение приземления СА вне опасной зоны (по воздействию ударной волны при взрыве РН) и вне сооружений СК;
-
• при выборе траектории полета ОГБ1 необходимо учитывать ветровой снос СА при движении на парашютной системе, т. е. ОГБ1 должен уводиться в боковом направлении в сторону ветрового сноса (с учетом реальных параметров ветра на СК).
При поступлении команды «Авария» в автоматику САС проводится разделение СА–ПАО и аварийного стыка ГО, затем подается команда на включение ЦРД ДУ САС, четырех РДГ, а также четырех УРД (в соответствии с логикой их задействования).
Логика включения УРД при аварии РН до момента снятия блокировки на выдачу команды на АВДУ построена на получении сигналов об угловом положении ОГБ1 относительно его положения на СК, определяемом по показаниям датчиков гироприборов, и выдаче команд для управления уводом ОГБ1 в соответствии с ветровыми уставками. Управление включением УРД разделено по плоскостям, в которых расположены гироскопы — в плоскости стрельбы (плоскость I–III) и в перпендикулярной к ней плоскости (плоскость II–IV).
Номера включаемых УРД определяются ветровыми уставками и отклонениями ОГБ1 от вертикали. Запрет или разрешение на включение конкретного УРД определяются величинами углов отклонения ОГБ1 от вертикали в соответствующей плоскости и уставками.
При определении граничных величин углов завала (в каждой плоскости), по достижении которых необходимо включение УРД, учитывается необходимость выполнения двух взаимопротиворечащих условий:
-
• высота ввода парашютной системы (ПС) должна быть не ниже допустимой, что обеспечивается сведением угла завала к минимуму (отклонение от вертикали — минимальное);
-
• удаление точки посадки СА от СК должно быть не менее допустимого, что требует большего угла завала.
Диапазон углов завала ОГБ1 в плоскостях I–III и II–IV, для которых без включения УРД обеспечиваются оптимальные из вышеприведенных условий, определяет границы включения или запрета на включение УРД. В автоматике САС этим границам соответствуют угловые уставки гироприборов ф 1 и ф 2 , которые имеют следующие значения:
-
• ф 1 = 6 ° (граница зоны запрета включения УРД для увеличения угла завала);
-
• ф 2 = 12 ° (граница зоны разрешения включения УРД для уменьшения угла завала).
Учет направления (азимут А ) и скорости ( V ) ветра задается ветровыми уставками, которые соответствуют необходимому смещению уставок ф 1 и ф 2 ОГБ1 в плоскостях I-III и II-IV на угол ф п :
-
• уставка а 1 соответствует ф п = +3 ° ;
-
• уставка 5 1 соответствует ф п = -3 ° ;
-
• уставка а 2 соответствует ф п = +9 ° ;
-
• уставка 5 2 соответствует ф п = -9 ° .
Значения ветровых уставок ( а 1 , 5 1 , а 2 и 5 2 ) в зависимости от величины и направления скорости ветра получены на основании расчетного моделирования полета ОГБ1, введены в эксплуатационную документацию по подготовке пуска и выбираются по результатам измерений ветра за три и один час до проведения пуска РН.
Для управления включением УРД с помощью разарретированных гироприборов в плоскостях I–III и II–IV вводятся ветровые уставки а1, 51, а2 и 52. Ветровые уставки действуют до момента первого включения УРД в соответствующей плоскости. Включение противоположного УРД в той же плоскости (при условии, что первый УРД отработал) осуществляется в соответствии с уставками ф1 и ф2 и текущим углом завала. В случае возникновения аварии РН до разарретирования гироприборов включаются управляющие двигатели УРД 3 и УРД 4, которые заваливают ОГБ1 в первую и вторую полуплоскости и смещают центр рассеивания точек посадки СА в направлении азимута стрельбы на 350…550 м и на 280…570 м вбок.
Второй вариант функционирования программы 1 начинается после снятия блокировки на выдачу команды АВДУ РН (с 20 с полета и до момента сброса ДУ САС). В этом варианте требования к суммарному импульсу основного двигателя уменьшаются, однако усложняются требования по обеспечению статической устойчивости ОГБ1 из-за снижения эффективности решетчатых стабилизаторов в области сверх- и гиперзвуковых скоростей полета. Для решения этой задачи не включается вторая камера сгорания ЦРД, а ее заряд используется в качестве балансировочного груза. Для исключения соударения с РН УРД 2 уводит ОГБ1 вправо из плоскости выведения, по положительному направлению оси OZ ст .
Для обеспечения безопасного отделения СА от ОГБ1 и создания наиболее благоприятных условий для введения ПС (необходимо, чтобы разделение происходило при малых скоростных напорах на восходящей ветви траектории автономного движения ОГБ1, а введение ПС — на нисходящей ветви траектории движения СА) предусмотрена следующая временная циклограмма:
-
• разделение СА–ГО происходит в соответствии с функционалом t разд = а + 0,2 t ав , где а = 12…14 с — временная уставка, зависящая от массовоцентровочных и инерционных характеристик ОГБ1 и сезона проведения старта РН; t ав — время прохождения сигнала «Авария»;
-
• время ввода ПС также определяется t ав :
-
– при t ав = 0…45 с ПС вводится через 7 с после разделения СА–ГО;
-
– при t ав = 45…80 с ПС вводится после срабатывания барореле «БРII»;
-
– при t ав > 80 с ПС вводится через 4 с после срабатывания барореле «БРI».
Полученные по результатам статистического моделирования параметры движения
ОГБ1 и СА после аварии на 1-ом участке работы САС (уставка а = 13 с) приведены в табл. 1 и 2.
Таблица 1
Параметры движения ОГБ1
в момент разделения СА-ГО ( Н , Ve , и е , q ) и максимальный скоростной напор ( q max), действующий на ОГБ1 до разделения
|
t ав, с |
H , км |
Vе , м/с |
и е , ° |
q , кгс/м2 |
q max, кгс/м2 |
|||||
|
m |
СТ |
m |
СТ |
m |
СТ |
m |
СТ |
m |
СТ |
|
|
0 |
1,30 |
0,06 |
59 |
7 |
61 |
12 |
191 |
44 |
1405 |
96 |
|
10 |
2,04 |
0,07 |
58 |
6 |
69 |
8 |
170 |
31 |
2055 |
121 |
|
20– |
3,29 |
0,07 |
59 |
5 |
73 |
8 |
153 |
27 |
2781 |
131 |
|
20+ |
2,65 |
0,05 |
26 |
5 |
55 |
15 |
33 |
14 |
2251 |
121 |
|
64 |
16,58 |
0,23 |
186 |
10 |
19 |
3 |
266 |
25 |
4427 |
166 |
|
100 |
50,60 |
0,31 |
1 102 |
44 |
24 |
1 |
60 |
10 |
1283 |
86 |
|
114 |
69,14 |
0,61 |
1583 |
48 |
23 |
1 |
12 |
3 |
438 |
44 |
Таблица 2
Максимальная высота подъема ( H max), параметры движения СА в момент ввода ПС ( Н , Ve , и е , q ) и удаление точки посадки от СК ( L ск)
|
t ав, с |
H max, км |
H , км |
Vе , м/с |
и е , ° |
q , кгс/м2 |
L ск, км |
||||||
|
m |
СТ |
m |
СТ |
m |
СТ |
m |
СТ |
m |
СТ |
m |
СТ |
|
|
0 |
1,38 |
0,08 |
1,33 |
0,09 |
37 |
7 |
–56 |
12 |
76 |
31 |
1,24 |
0,50 |
|
10 |
2,13 |
0,08 |
2,09 |
0,09 |
32 |
6 |
–61 |
11 |
52 |
20 |
1,84 |
0,87 |
|
20– |
3,38 |
0,08 |
3,35 |
0,09 |
29 |
5 |
–64 |
11 |
38 |
15 |
3,13 |
1,54 |
|
20+ |
2,65 |
0,05 |
2,48 |
0,07 |
56 |
4 |
–82 |
5 |
155 |
22 |
1,95 |
0,99 |
|
64 |
16,75 |
0,28 |
5,61 |
0,20 |
163 |
8 |
–82 |
4 |
924 |
90 |
18 |
4 |
|
100 |
61,38 |
0,91 |
10,05 |
0,32 |
223 |
10 |
–71 |
4 |
1033 |
101 |
207 |
10 |
|
114 |
89,23 |
1,78 |
10,07 |
0,31 |
222 |
10 |
–66 |
4 |
1020 |
98 |
379 |
12 |
Для случаев аварии РН в зоне максимальных скоростных напоров принципиальное значение имеет обеспечение увода ОГБ1 на безопасное расстояние от РН и отсутствие последующих соударений ОГБ1 и РН. Характер изменения относительного расстояния между центрами масс (ЦМ) ОГБ и РН при t ав = 64 с представлен на рис. 4.
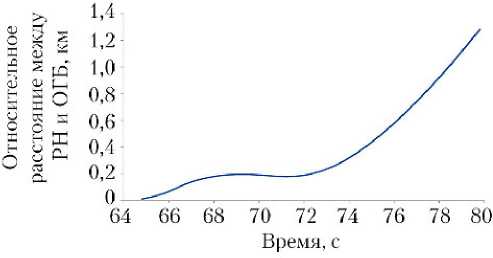
Рис. 4. Относительное расстояние между центрами масс ОГБ1 и РН (tав = 64 с)
Программа 1А. Рассмотрим основные результаты исследования функционирования систем при отделении ОГБ1А в случае аварии на участке 1А. Участок работы САС 1А начинается с момента сброса ДУ САС на 113–115 с полета за 3 с до перехода на вторую ступень работы РН и заканчивается в момент сброса ГО на 152–158 с.
Программа 1А была введена с целью обеспечения более раннего сброса ДУ САС, что позволило увеличить выводимую массу корабля.
Небольшое значение скоростного напора от момента сброса ДУ САС (номинальное значение 480 кгс/м2) позволяет существенно снизить требования в энергетике РДТТ САС и применить схему увода аэродинамически неустойчивого ОГБ1А (без ДУ САС и раскрытия решетчатых стабилизаторов) с интенсивной поперечной закруткой относительно направления движения РН. Отделение и увод ОГБ1А обеспечивается попарным включением РДГ.
Рассмотрим динамику наиболее опасного интервала участка 1А — сразу после сброса ДУ САС, который соответствует максимальному уровню аэродинамических сил и моментов. На приведенных ниже кинограммах относительного движения ОГБ1А и РН (рис. 5) в случае аварии РН сразу после отделения ДУ САС для четырех вариантов «завала» РН от программного угла по разным плоскостям стабилизации видно, что ОГБ1А интенсивно уходит от РН, исключая соударение объектов [8, 9].
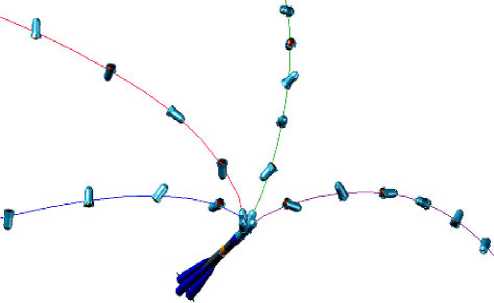
Рис. 5. Кинограммы отделения ОГБ1А от РН для четырех вариантов «завала» РН от программного угла по разным плоскостям стабилизации
Угловая скорость вращения ОГБ1А при его автономном движении после отделения в случае аварии в начале рассматриваемого участка 1А может достигать 200 °/с при номинальных значениях параметров. Типовой случай развития угловой скорости вращения ОГБ1А в случае аварии типа «Потеря управляемости» и отклонения от программного угла на 10° в сторону IV плоскости стабилизации (пространственный угол крена ф = 90°) представлен на рис. 6.
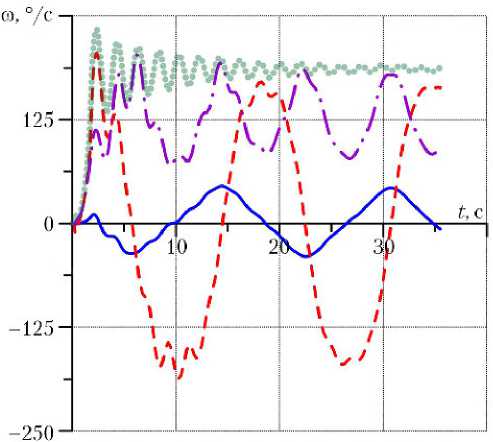
Рис. 6. Компоненты угловой скорости вращения ОГБ1А:
^^™ — Ф X — — — ш y — • — — ф ^ ••• — |ф|
Необходимо отметить, что в течение ~2,5 с после выдачи команд на разрыв стыка и запуск РДГ прижимающая аэродинамическая сила вместе с «поджимающей» силой от тяги последействия двигателей первой ступени РН превосходит силу двигателей увода. Перед потерей контакта с РН возможен относительный разворот ОГБ1А с упором на шпильки стыка обтекателя. Моделирование движения проводилось без учета упругих колебаний РН, возникающих после АВДУ.
Отделение СА от ОГБ1А [10] проводится в верхней точке траектории движения ОГБ на высотах более 50 км ( t разд = а + 0,2 t ав ). Скоростной напор на момент разделения составляет ~20 кгс/м2, и аэродинамические силы практически не влияют на процесс отделения СА. Отделение СА проводится за счет воздействия сил толкателей, расположенных на стыке СА–БО, а также сил от истечения газов наддува БО.
В процессе выхода СА из ГО три опорные площадки ложементов САС взаимодействуют с боковой поверхностью СА. Возникающая при этом максимальная сила взаимодействия может достигать 4 тс (оценка этой силы зависит от используемой модели взаимодействия) и определяется, прежде всего, значением угловой скорости вращения ОГБ1А.
Типовая кинограмма отделения СА в связанной с ОГБ1А системе координат представлена на рис. 7. Расчет проводился в течение 1 с после команды на отделение СА.
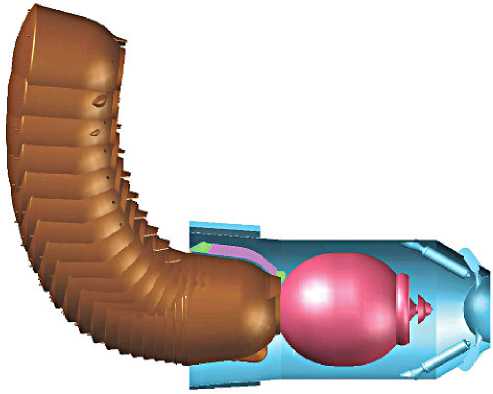
Рис. 7. Кинограмма отделения СА от ОГБ1А (шаг 0,05 с)
Программа 2. Отсутствие аэродинамических сил, препятствующих процессу отделения ОГБ, позволяет использовать штатные средства разделения отсеков корабля, но только после уменьшения импульса последействия маршевых двигателей РН после АВДУ. По истечении временной задержки Δ t разд (после получения команды «Авария») проводится отделение БО от СА ( V отн = 0,9–1,1 м/с); затем отделяется СА от ПАО ( V отн СА = 0,68–0,78 м/с).
Указанная программа аварийного спасения была выбрана в период 1970–80 гг., когда статистика пусков РН типа Р7 подтверждала:
-
• высокие показатели надежности РН;
-
• отсутствие быстроразвивающихся аварийных ситуаций на внеатмосферном участке полета.
Однако аварийная ситуация РН «Со-юз-2.1а» при запуске корабля «Прогресс М-27М» 28 апреля 2015 г. развивалась чрезвычайно быстро и сопровождалась разрушением РН. В подобной ситуации аварийное спасение экипажа по существующей программе 2 при отсутствии средств экстренного отделения СА будет иметь вероятностный характер. В связи с этим на перспективном пилотируемом транспортном корабле средства экстренного отделения предусмотрены практически на всей траектории выведения.
Вторая важная особенность процесса аварийного спасения по программе 2 состоит в том, что полет СА в плотных слоях атмосферы сопровождается большим увеличением осевых продольных перегрузок (рис. 8). Переносимость подобных перегрузок была подтверждена большим объемом научно-исследовательских работ (выполненных в АО «НПП «Звезда») по определению границ переносимости статических и ударных перегрузок, по выбору оптимальной позы экипажа в креслах «Казбек» (А.С. Барер, А.С. Повицкий, Б.А. Рабинович) [7, 11].
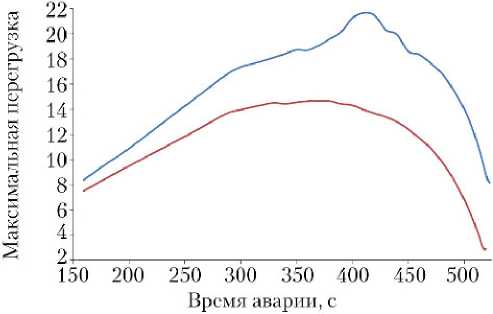
Рис. 8. Максимальные перегрузки при полете спускаемого аппарата в плотных слоях атмосферы: ■ — баллистический спуск; ■ — управляемый спуск
Случаи срабатывания САС при выведении КК «Союз»
При запуске корабля «Союз» (№ 39) с экипажем В.Г. Лазарев и О.Г. Макаров 5 апреля 1975 г. произошла авария РН из-за отказа в системе разделения II и III ступеней. Аварийная ситуация сопровождалась вращением III ступени вокруг продольной оси. С учетом временной задержки на аварийное отделение СА от РН к моменту отделения разворот СА по крену достиг 180 ° . Этот угол был принят системой управления спуском СА за исходный, и поэтому дальнейший полет СА проходил в режиме «отрицательного качества», что привело к росту продольной перегрузки до nx = 21,3. Спускаемый аппарат приземлился в горном районе Алтая, экипаж был своевременно эвакуирован.
При запуске корабля «Союз Т» (зав. № 21Л) с экипажем В.Г. Титов и Г.М. Стрекалов в сентябре 1983 г. произошла авария РН на старте. Во время предпусковых операций на РН (примерно за 2 мин до расчетного времени старта) произошло возгорание одного из агрегатов в системе подачи топлива в газогенераторы турбонасосных агрегатов, пожар распространился на ракетные блоки. По визуальному наблюдению руководитель пуска начальник 1-го управления космодрома А.А. Шумилин и технический руководитель по РН А.М. Солдатенков выдали пароль-команду. С момента появления пламени на это ушло 6 с, еще 4 с ушло на выдачу команд операторами и 1,2 с — на исполнение команды автоматикой корабля. ОГБ был отделен от аварийной РН, на которой за секунду до этого уже произошел локальный взрыв, и которая к этому моменту начала наклоняться. В соответствии с логикой работы САС спускаемый аппарат отделился от ОГБ на высоте 1 км и приземлился на безопасном расстоянии от старта (~3,7 км). Спустя 3–4 с после увода ОГБ остатки разрушенной РН рухнули в приямок стартового сооружения.
Средства САС сработали безукоризненно. Не зря в НПО «Энергия» большое внимание уделялось проектированию и систематическому совершенствованию САС. Вместе с тем тщательному анализу подверглись все обстоятельства аварии, проведены мероприятия по РН, в документацию по подготовке и проведению пуска внесены необходимые уточнения.
Авария при выведении корабля «Союз МС-10» 11 октября 2018 г. была зафиксирована на 121 с полета РН.
Согласно расчетным данным, в момент поступления команды «Авария» РКН находилась на высоте 48,2 км, удаление от СК по трассе составляло 52,2 км, относительная скорость 1 750,3 м/с, скоростной напор 196 кгс/м2.
После приема команды «Авария» от СУ РН была реализована программа САС1А: произведен разрыв электрических и механических связей по аварийному стыку, выдана команда на АВДУ носителя, затем попарным последовательным включением двигателей РДГ ОГБ1А был уведен от РН.
На 159,1 с от команды «контакт подъема» (КП) СА отделился от ОГБ1А. Далее СА продолжил движение в режиме демпфирования угловых скоростей по всем осям (максимальная высота подъема СА составила 90,3 км на 217,6 с).
Максимальная перегрузка при спуске составила ~6,7 единиц.
На 381,9 с от КП произошел отстрел крышки парашютного контейнера, и началось введение основной парашютной системы.
Через 1 180,5 с от КП СА совершил посадку на удалении ~405 км от СК в точке с географическими координатами Ф = 47 ° 35 ' 08"; X = 68 ° 00 ' 25".
Телеметрическая информация (ТМИ) РН не содержит достаточных данных о положении РН в потоке при выдаче команды «Авария», поэтому при моделировании процесса отделения стояла задача подобрать параметры таким образом, чтобы результаты моделирования максимально совпали с реальными данными ТМИ в части угловых возмущений ОГБ1А. Наиболее близкое совпадение получено для пространственного угла атаки а п = 10 ° и пространственного угла крена ф п = 145^160 ° . Различия в конкретных значениях массово-центровочных и инерционных характеристик ОГБ1А, векторах тяг РДГ (в пределах штатных разбросов), аэродинамических характеристиках позволяет их варьировать для получения более близкого соответствия расчетных данных с ТМИ.
На рис. 9 приведены значения проекций угловой скорости ОГБ1А, зафиксированные в СЗИ СА, и близкие к ним расчетные значения.
Удовлетворительное совпадение расчетных и телеметрических значений проекций угловой скорости ОГБ1А на первых 10–15 с автономного полета подтверждает правильность выбора условий отделения ОГБ1А от РН и значений силовых факторов, влияющих на изменение угловой скорости. Соответствующая выбранным параметрам отделения кинограмма относительного движения, приведенная на рис. 10, показывает, что ОГБ1А безударно уходит от аварийной РН.
Согласно данным ТМИ, ОГБ1А к моменту отделения СА имел угловую скорость, превышающую по модулю 40 ° /с, что приводит к неизбежному контакту опорной площадки ложемента с боковой поверхностью СА в процессе выхода СА из ГО. Моделирование данного процесса показало наличие двух участков взаимодействия опор ложементов САС и корпуса СА. Максимальное значение этой силы составило 1,5 тс.
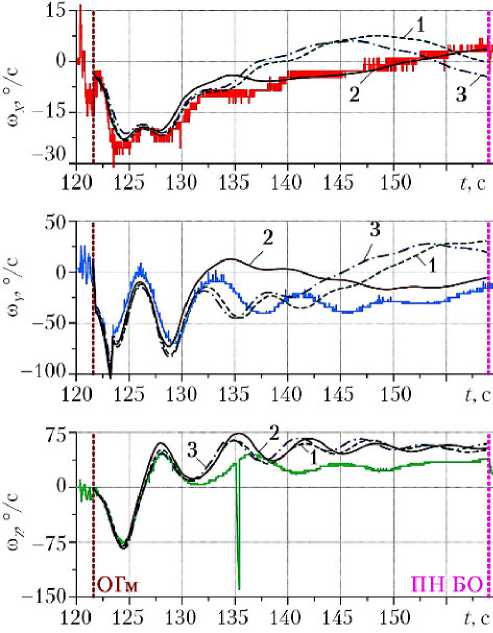
Рис. 9. Угловые скорости ОГБ1А
Примечание . Цветом показаны параметры телеметрии; 1, 2, 3 — расчетные зависимости.
Сравнение результатов моделирования и данных телеметрической информации показало совпадение расчетных и фактических значений угловых скоростей СА, а также наличие двух участков взаимодействия в интервалах 0,18…0,20 с и ~0,5 с от момента выдачи команды на разделение стыка.
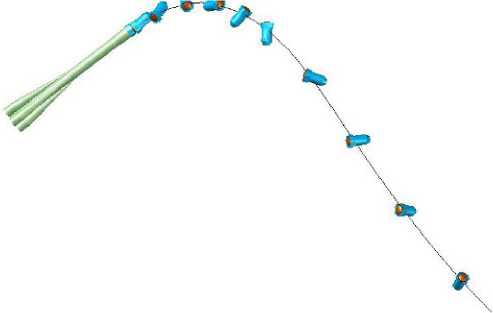
Рис. 10. Кинограмма отделения ОГБ1А от ракеты-носителя
Взаимодействие ГО и СА при отделении приводит к демпфированию набранной угловой скорости (уменьшение модуля скорости больше, чем в два раза), что обеспечивает более комфортное угловое движение при спуске СА.
Данное взаимодействие не привело к повреждениям боковой поверхности СА при отделении, что было установлено при анализе процесса посадки СА и осмотре изделия.
Перспективные работы
Большой опыт разработки САС экипажа кораблей «Союз», Л1, лунного орбитального корабля, орбитального корабля «Буран» и появление современных высокотехнологичных решений в области создания РДТТ позволяют выбрать основные направления работ по САС перспективного пилотируемого транспортного корабля:
-
• при полетах на РН «Ангара-А5П»:
– ракетный блок аварийного спасения (РБАС), обеспечивающий отделение и увод ОГБ в различных конфигурациях, выполнен по двухблочной схеме: первый блок в составе основного, управляющего и разделительного двигателей, отделяется от РН после прохождения плотных слоев атмосферы с целью уменьшения затрат массы полезного груза; второй блок обеспечивает экстренное отделение ОГБ в различных конфигурациях на большей части траектории полета верхних ступеней РН «Ангара-А5П» и РН СТК;
– для управления полетом ОГБ применен управляющий твердотопливный двигатель с изменяемым вектором тяги, с его помощью обеспечивается управляемый полет ОГБ и приведение возвращаемого аппарата (ВА) в заранее выбранный район посадки, а также разворот ОГБ на 160 ° перед отделением ВА (для создания благоприятных условий дальнейшего полета ВА и ввода ПС);
-
• при полетах на РН СТК дополнительно к применению РБАС целесообразно проработать следующие варианты спасения:
-
• нештатное продолжение полета РН при отказе одного двигателя блока первой ступени;
-
• применение разгонных блоков (входящих в состав полезной нагрузки) для довыведения ПТК на орбиту.
Выводы
Опыт создания и развития средств аварийного спасения космического корабля «Союз» послужил основой для дальнейших работ по созданию подобных средств на кораблях Л1, лунном орбитальном корабле, «Буран», а в настоящее время востребован в работах по перспективному пилотируемому кораблю.
Выражаем благодарность и большое уважение руководителям и рядовым инженерам, создателям космической техники, благодаря творческой работе которых претворялись в жизнь самые смелые научнотехнические решения и были созданы средства, обеспечивающие высокий уровень безопасности полета на участке выведения.
Список литературы Аварийное спасение экипажа пилотируемого транспортного корабля "Союз" на участке выведения (к истории создания уникальной космической техники)
- Ракетно-космическая корпорация«Энергия» имени С.П. Королёва 1946–1996. М.: РКК «Энергия», 1996. 670 с.
- Космические аппараты / Под общ. ред. проф. К.П. Феоктистова. М.: Военное издательство, 1984. 319 с.
- С.П. Королёв и его дело. Свет и тени в истории космонавтики / Под общ. ред. акад. Б.В. Раушенбаха. М.: Наука, 1998. 720 с.
- С.П. Королёв. Энциклопедия жизни и творчества. М.: Энергия, 2014. 704 с.
- Афанасьев И.Б., Батурин И.М. Мировая пилотируемая космонавтика. История. Техника. Люди. М.: РТСофт, 2005. 752 с.
- История развития отечественной пилотируемой космонавтики. М.: ООО «Издательский дом «Столичная энциклопедия», 2015. 752 с.
- Лившиц А.Н. Аварийное покидание летательного аппарата. М.: Радис-РРЛ, 2015. 595 с.
- Кокушкин В.В., Хомяков М.К., Овсянникова Н.Ю. Динамика движения элементов головного блока пилотируемого корабля в аварийной ситуации // Вестник МГТУ им. Баумана. Сер. «Машиностроение». 2016. № 1(106). С. 4–16.
- Кокушкин В.В., Хомяков М.К., Овсянникова Н.Ю., Богомолов Н.В. Динамика отделения головного блока от ракетыносителя в случае аварии на атмосферном участке выведения // Вестник МГТУ им. Н.Э. Баумана. Сер. «Машиностроение». 2017. № 2. С. 4–14.
- Овсянникова Н.Ю. Динамика отделения спускаемого аппарата космического корабля «Союз» в случае аварии ракеты-носителя на атмосферном участке выведения // Космонавтика и ракетостроение. 2017. № 4(97). С. 34–40.
- Рабинович Б.А. Безопасность человека при ускорениях (биомеханический анализ). М.: Книга и бизнес, 2007. 208 с. Статья поступила в редакцию 22.08.2019 г. Окончательный вариант — 18.09.2019 г.
