Автоматическая система синхронизации гидроподъемников верхних рабочих ворот судоходного шлюза

Автор: Мельников Евгений Владиславович, Данилушкин Иван Александрович, Колпащиков Сергей Александрович, Морозов Виктор Николаевич, Краснощеков Игорь Леонидович, Павлович Лев Анатольевич, Красинский Дмитрий Борисович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Актуальные проблемы машиностроения
Статья в выпуске: 1-2 т.16, 2014 года.
Бесплатный доступ
В статье рассматриваются принципы построения системы управления гидроподъемниками верхних рабочих ворот судоходного шлюза. Приводятся экспериментальные данные, полученные в ходе проведения натурных экспериментов на шлюзе.
Система управления, регулятор, синхронизация, обратная связь, гидроподъемник
Короткий адрес: https://sciup.org/148202762
IDR: 148202762 | УДК: 681.5.04
Automatic synchronization system of upper working gate hydraulic jacks at navigable ship lock
In article the principles of creation the control system of hydraulic jacks at upper working gate of navigable ship lock are considered. The experimental data obtained during carrying out natural experiments on a ship lock are given.
Текст научной статьи Автоматическая система синхронизации гидроподъемников верхних рабочих ворот судоходного шлюза
Красинский Дмитрий Борисович, кандидат технических наук, руководитель лаборатории сельсинной системы, механически соединенной со спускными клапанами в напорных магистралях. Это решение не отвечает современным требованиям по точности поддержания перекоса сторон ворот, надежности работы и простоты обслуживания системы синхронизации.
В рамках работ по реконструкции шлюзов Волжского бассейна были проведены экспериментальные исследования характеристик гидроподъемников ворот при эксплуатации существующей системы управления, построенной на базе синхронно-следящей сельсинной системы, и при использовании современных регуляторов и методов регулирования, что позволило реализовать перспективную, высокоэффективную систему управления ВРВ.
Экспериментальные работы проводились в г. Балаково на шлюзе N25-N26 ФБУ «Администрация Волжского бассейна».
Функциональная схема подъемно-опускных ворот шлюза представлена на рис. 1. Принцип действия гидросистемы на каждой из сторон одинаков. При подъёме ворот насосы подают масло в гидроцилиндр, вызывая перемещение поршня вверх. Управляемый гидрозамок при этом закрыт. Опускание ворот осуществляется с помощью открытия гидрозамка и слива масла из полости цилиндра в маслобак. Для синхронизации положения сторон ворот помимо штатной системы синхронизации (на схеме не показана) использовались электрически управляемые пропорциональные гидродроссели и гидронасосы с переменной производительностью.
Исследовалось поведение ВРВ при раздельной и совместной работе регуляторов, а также различные методы управления перемещением ворот.
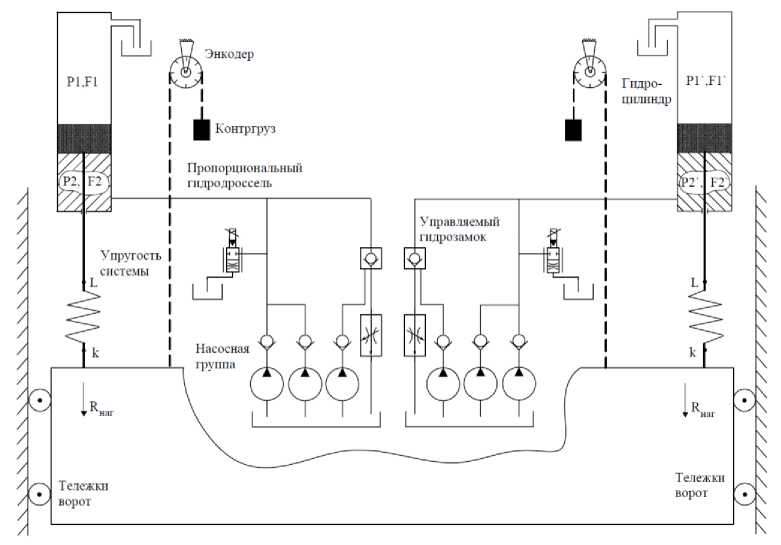
Рис. 1. Функциональная схема ворот
Контроль положения сторон ворот осуществлялся угловыми энкодерами, механически связанными системой тросов со сторонами ворот. Динамика перемещения ВРВ описывается уравнениями поступательного движения поршней гидроцилиндров под действием сил давления, развиваемых маслонасосами гидроподъемников, внешней нагрузки на ворота, сил трения и уравнениями с учетом сжимаемости масла в полостях гидроцилиндров. Нелинейность движения ворот вызвана упругостью масла в гидросистемах и упругостью металлоконструкций ворот, изменением массы ворот в ходе подъема (за счет увлекаемой воротами воды), влиянием нелинейных характеристик трения в гидроцилиндрах и направляющих ворот, а также нелинейной характеристикой управляемых гидродросселей и гидронасосов. Сложность математического описания происходящих в гидросистемах ВРВ процессов потребовала проведения натурных экспериментов с целью определения передаточных функций системы управления – гидроподъемники-ворота при использовании различных регуляторов и методов регулирования. При движении ворот под управлением штатной системы синхронизации в гидросистемах наблюдаются колебательные процессы с устойчивыми частотами. Спектральный анализ показывает наличие колебаний с частотами 15 Гц, 200 Гц и рядом других частот. На рис. 2 приведены результаты наблюдений за давлением в гидросистеме ВРВ при работе штатной системы синхронизации. Также наблюдались колебательные процессы при перемещении каждой из сторон ворот, вызванные износом механических систем и несовершенством схемных решений.
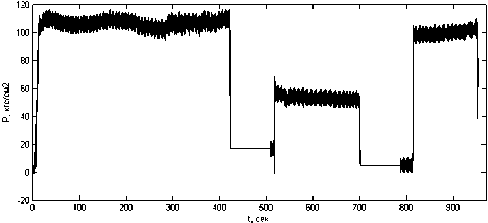
Рис. 2. Колебательный процесс в гидросистеме ВРВ наблюдаемый при работе штатной системы синхронизации
Дальнейшие исследования проводились при отключенной штатной системе синхронизации под управлением экспериментальной системы, построенной на современной элементной базе с использованием цифровых регуляторов, частотно-управляемого привода и пропорциональных гидродросселей с токовым сигналом управления. Идентификация объекта управления проводилась по результатам активного эксперимента. На рис. 3 представлен график переходного процесса по давлению в гидросистеме при ступечатом изменении производительности гидронасоса в процессе подъёма ВРВ. Анализ графика показывает, что объект может быть представлен колебательным звеном с передаточной функцией
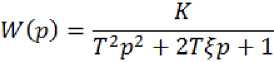
где K - коэффициент усиления, T - постоянная времени, ^ - коэффициент демпфирования, 0 <^< 1 .
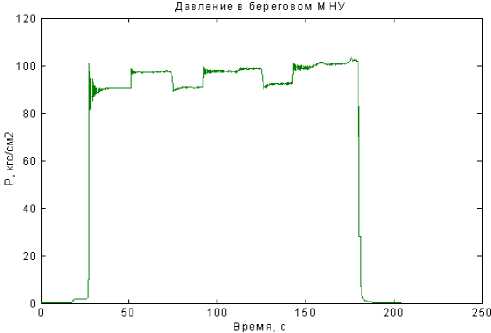
Рис. 3. Переходный процесс в гидросистеме ВРВ ступенчатом изменении производительности маслонасоса
Результаты идентификации использованы при синтезе системы автоматического управления, использующей в качестве исполнительного устройства преобразователь частоты. По результатам исследования системы на базе частотного преобразователя были сделаны следующие выводы:
-
1. Динамика цепочки исполнительных устройств и механизмов «преобразователь частоты - электродвигатель - маслонасос» характеризуется инерционностью, не позволяющей компенсировать колебательный характер изменения давления в гидросистеме ВРВ;
-
2. Резкая и частая смена производительности маслонасоса в процессе эксплуатации приводит к снижению его ресурса.
На основании проведенных экспериментов было принято решение об использовании комбинированного частотно-дроссельного способа управления производительностью гидросистем, обеспечивающего:
-
• широкий динамический диапазон регулирования скорости движения ворот;
-
• плавность отрыва ворот от порога;
-
• требуемое усилие страгивания ворот без использования датчиков обратной связи на маслонасосах;
-
• ограничение диапазона частот вращения маслонасосов в заданных границах.
Комбинированный частотно-дроссельный способ управления предполагает выделение двух независимых контуров управления с разделением по частоте отрабатываемых возмущений и управляющих воздействий: низкочастотные сигналы отрабатываются с помощью системы автоматического управления на базе частотного преобразователя, высокочастотные - с помощью системы автоматического управления на базе пропорционального гидродросселя. График переходного процесса по давлению в гидросистеме при частотно-дроссельном регулировании приведен на рис. 4. Наблюдается стабильное поддержание давления в течение всего времени подъёма ворот.
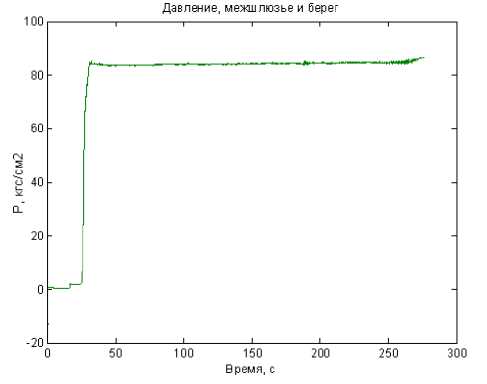
Рис. 4. Апериодический процесс в гидросистемах ВРВ при частотно-дроссельном регулировании
Следующий этап исследований был посвящен разработке оптимального алгоритма перемещения ворот. В качестве базового алгоритма управления был использован алгоритм системы штатной синхронизации: обе стороны ворот перемещаются с максимально возможной скоростью, а в случае опережения одной из сторон её скорость снижается. Базовый алгоритм отлично показал себя при перемещении ворот на максимальной скорости, однако для решения задачи управления скоростью перемещения он непригоден. Кроме того, алгоритм должен учитывать особенности аппаратной реализации системы автоматического управления перемещением ВРВ. Управление перемещением каждой из сторон ворот осуществляется независимой системой автоматического управления, реализованной на отдельном контроллере. Информация о положении противоположной стороны поступает на вход системы отдельным сигналом.
Структурная схема реализованной системы приведена на рис. 5.
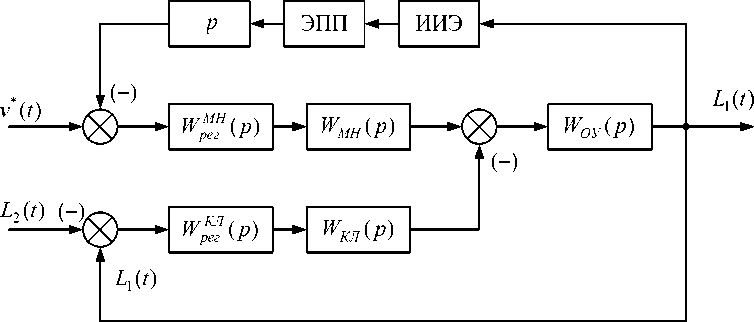
Рис. 5. Структурная схема системы автоматического управления положением стороны ворот. ИИЭ - идеальный импульсный элемент; ЭПП - экстраполятор первого порядка
Заданное значение скорости v *( t ) сравнивается с текущим значением скорости, величина рассогласования поступает на вход регулятора W MH ( p ), который формирует управляющее воздействие для частотного преобразователя электропривода маслонасоса. Так регулируется скорость перемещения стороны ворот. Для снижения влияния высокочастотного шума на управление маслонасосом, скорость перемещения стороны ворот вычисляется по периодическим измерениям её положения. Сигнал положения управляемой стороны ворот L 1 ( t ) измеряется раз в секунду и на основании этих измерений выполняется оценка скорости перемещения. На структурной схеме измерение скорости перемещения реализовано последовательным соединением идеального импульсного элемента (ИИЭ), экстраполятора первого порядка (ЭПП) и блока дифференцирования. Синхронизация перемещения сторон ворот осуществляется с помощью пропорционального дросселя с передаточной функцией W КЛ (p ). Текущее положение управляемой стороны ворот L 1 (t ) сравнивается с приходящим извне сигналом положения противоположной стороны ворот L 2( t ) , рассогласование поступает на вход регулятора <е Л ( р ), который формирует управляющее воздействие для пропорционального дросселя.
В качестве регулятора производительности маслонасоса WMH(p) используется пропорционально-интегральный регулятор с ограничением скорости нарастания сигнала на выходе. Ограничение позволяет уменьшить динамические перегрузки маслонасоса при изменении производительности и, как следствие, увеличить его ресурс. Быстродействие клапана позволяет рассматривать его как безынерционный элемент, однако при настройке системы необходимо учитывать его нелинейную статическую характеристику, зависящую от давления.
В качестве регулятора, управляющего положением клапана, используется безынерционный элемент с нелинейной статической характеристикой, представленной на рис. 6. При положительном значении рассогласования, большем, чем заданная зона нечувствительности, гидродроссель начинает открываться пропорционально величине рассогласования, снижая скорость перемещения управляемой стороны. При отрицательном - гидродроссель полностью закрыт, обеспечивая максимальную скорость перемещения стороны, а рассогласование компенсируется таким же регулятором на другой стороне.
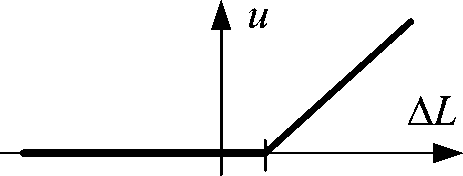
Рис. 6. Статическая характеристика регулятора положения клапана
Выводы: предложенные алгоритмические и схемные решения позволили уменьшить перекос сторон ворот в 10 раз по сравнению со штатной системой управления, повысить плавность движения ворот, уменьшить их «дробление» при перемещении, устранить гидроудары в гидросистемах при страгивании ворот, предоставить диспетчеру достоверную информацию о состоянии ворот и обеспечить развернутую диагностику механизмов. Надежность разработанных решений проверена проведением около тысячи шлюзований судов различного класса под управлением модернизированной экспериментальной системы в рамках навигации 2013 г.
Список литературы Автоматическая система синхронизации гидроподъемников верхних рабочих ворот судоходного шлюза
- Бессмертный, Д.Э. Современные тенденции модернизации приводов механического оборудования в судоходных гидротехнических сооружений./Д.Э. Бессмертный, В.Н. Морозов, И.Л. Краснощеков, Л.А. Павлович//Гидротехника 21 век. 2011. №2. С. 42-45.
- Морозов, В.Н. О реализации концепции комплексной реконструкции приводов механического оборудования СГТС/В.Н. Морозов, И.Л. Краснощеков, Л.А. Павлович и др.//Гидротехника 21 век. 2013. №2,. С. 28-33.
