Автоматическая система взаимно инвариантного векторного управления переменными технологического состояния аппарата приготовления раствора

Автор: Нейдорф Рудольф Анатольевич, Мохсен Мохаммед Неама
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 1 (84) т.16, 2016 года.
Бесплатный доступ
Целью данной работы является повышение эффективности автоматизации технологических процессов химической промышленности и родственных ей отраслей. Рассматривается типичный для отрасли процесс приготовления раствора и решается задача разработки векторного закона управления, эффективного как в плане интенсивности или быстродействия, так и в плане взаимной инвариантности процессов управления различными технологическими переменными. Для решения этой задачи использован подход к синтезу законов управления на основе желаемых характеристик синтезируемой системы управления. При построении желаемой математической модели управляемого аппарата приготовления раствора задействована математическая модель квазиоптимального по быстродействию управления. В результате синтеза сформулирован достаточно сложный нелинейный векторный закон управления, который, однако, обеспечивает все свойства, заложенные в парадигму его построения и реализации. Выполнено имитационное моделирование многоконтурной системы автоматического управления с реализацией синтезированных законов и исследование построенной модели. Это позволило полностью подтвердить абсолютную автономность управления уровнем раствора выходного потока в аппарате, а также его концентрацией. Кроме того, доказана независимость управляемых переменных от изменения нагрузки - расхода приготавливаемого раствора. Полученные данные могут быть использованы на химических и родственных им производствах (пищевых, нефтеперерабатывающих и др.). Материалы и результаты представленных исследований показывают, что для эффективного синтеза векторных законов управления нелинейными многосвязными объектами метод эталонных математических моделей может использоваться в сочетании с парадигмой квазиоптимизации быстродействия этих законов.
Технологический процесс, аппарат, приготовление раствора, математическая модель, переменная состояния, закон управления, автономность, многосвязность, быстродействие
Короткий адрес: https://sciup.org/14250183
IDR: 14250183 | УДК: 519.87:681.51 | DOI: 10.12737/18276
Automatic system of mutually invariant vector control of mixer technology state variables
The work objective is to improve the automation efficiency of the technological processes of the chemical industry and the related industries. A typical for the industry solution preparation process is considered; and the task of developing a vector control law, effective in terms of both intensity or speed and cross-invariance of the management processes of various technological variables, is solved. To cope with this task, the approach to the control laws synthesis based on the desired characteristics of the synthesized control system is taken. A mathematical model of the quasi-optimal speed control is used to construct the desired mathematical model of the controlled machine for the solution preparation. The synthesis is resulted in a rather complex non-linear vector control law which, however, provides all the properties inherent in the paradigm of its creation and implementation. Simulation modeling of a multistage automatic control system with the implementation of the synthesized laws is carried out, as well as the research of the constructed model. This allows fully confirm an absolute control autonomy of the outflow solution level in the unit and of its concentration. Besides, the independence of the controlled variables from the changing load - flow fluid preparation - is established. The results obtained are intended for the implementation in the chemical technology and the related industries (food processing, oil refining, etc.). The materials and the research results presented show that for an effective synthesis of the vector control laws of nonlinear multiply connected objects, the method of reference mathematical models can be applied along with the quasi-optimization speed performance of these laws.
Текст научной статьи Автоматическая система взаимно инвариантного векторного управления переменными технологического состояния аппарата приготовления раствора
Введение. Наряду с совершенствованием технологии автоматизация производства является ключевой составляющей развития любой промышленности: химической, микробиологической, пищевой и др. При автоматизации промышленных производств объектом автоматизации является обычно не отдельный технологический процесс или аппарат, а некий технологический модуль, комплекс или линия со сложными взаимосвязями между его агрегатами, коммуникациями, потоками и пр. Современные системы автоматизации таких комплексов должны обладать широкими функциональными возможностями, новыми техническими характеристиками. Выполнение указанных требований позволяет обеспечить высокую надежность (живучесть) элементов управления, их информативность, функциональность, быстродействие, комфортность работы оператора и пр. [1–3].
Однако все перечисленные качества автоматизированных систем управления технологическими процессами (АСУ ТП) характеризуют не только средства и системы централизованного управления. Корни этих свойств — в так называемых локальных системах автоматического управления (ЛСАУ) [4–6]. Это обусловлено рядом причин. Во-первых, именно ЛСАУ ориентированы на работу с первичной информацией о состоянии технологического процесса. Во-вторых, они непосредственно воздействуют на исполнительные механизмы регулирующих органов управления процессом. Таким образом, именно на нижнем уровне — уровне локальных САУ формируются фундаментальные свойства АСУ ТП. К ним относится, прежде всего, быстродействие управления: очевидно, что никакая системная надстройка не повысит скорость медленно функционирующей системы, непосредственно воздействующей на объект. Постановка задачи. В настоящей статье ставится задача исследовать возможности синтеза САУ локального уровня, обеспечивающие близкое к максимальному быстродействие управления технологическим процессом.
Математическая модель аппарата приготовления раствора (АПР). Аппарат представляет собой технологическую емкость, которая оборудована трубопроводами подачи смешиваемых потоков и отвода смеси, а также эффективной мешалкой. В емкость подаются растворитель с расходом G 0 и раствор некоторого вещества высокой концентрации C 0 с расходом G C , как показано на рис. 1. Управление таким аппаратом сводится к поддержанию заданной выходной концентрации C приготавливаемого раствора и его уровня в аппарате при заданной общей производительности G .
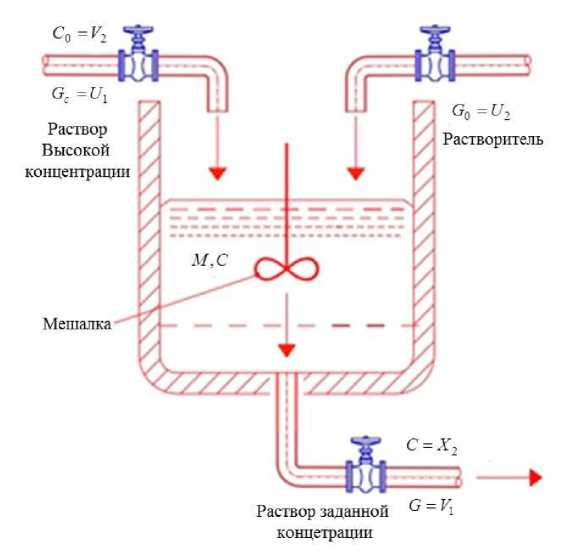
Рис. 1. Расчетная схема аппарата приготовления раствора
Достаточно адекватная математическая модель (ММ) такого аппарата как объекта управления (ОУ) может быть получена на основании закона сохранения количества вещества, применяемого как ко всем компонентам процесса в общем потоке, так и к отдельным его компонентам [7–9].
По закону сохранения количества вещества общее количество раствора в аппарате в условиях нестационарно-сти процесса будет подчиняться следующему уравнению баланса:
dtM = ( Go + G c - G ) • dt , (1)
где M — количество раствора в аппарате, которое с учетом нестационарности M считается функцией времени; d t — дифференциал переменной по независимому аргументу t — времени.
По этому же закону количество вещества, находящегося в аппарате в растворенном виде, также будет подчиняться составленному для него в отдельности уравнению баланса неустановившегося процесса:
dt ( C • M ) = ( Co • GC - C • G ) • dt , (2)
где C 0 , C — массовая концентрация.
Концентрация всего раствора в аппарате и концентрация выходного потока обозначаются одинаково — C .
Это обосновано гипотезой об «идеальном смешении» [7], опирающейся на предположение о высокой эффективности мешалки. Преобразуя выражения (1) и (2), получим дифференциальные уравнения (ДУ):
dM = Gc + Go - G , dt dM dC
C --+ M — = C o • Gc - C • G .
dt dt 0 C
Преобразование (4) подстановкой в него (3) позволяет получить корректный вид этого ДУ:
M • dC = ( C o - C ) • G c - C • G o .
В свете задачи управления технологическим процессом смешения переменными состояния (ПС) объекта следует считать уровень в емкости H = „ и выходную концентрацию C^x2, где символом « = » отмечено «равенство по обозначению». Управляющими воздействиями процесса формирования концентрации на выходе АПР будут GC об и1 и Go об и2. Естественными возмущающими воздействиями для АПР являются технологическая нагрузка на об аппарат — потребляемый технологической линией расход приготовленного раствора ( G = V1) и концентрация исполь- об зуемого сырья (C0 = v2 ).
Таким образом, для получения рабочей ММ аппарата смешения как ОУ необходимо выразить величину H через другие технологические параметры и переменные [7–10]. Это можно сделать через несложную зависимость массы раствора M от его объема V и плотности ρ , которая, в свою очередь, зависит от концентрации C и темпера- туры T :
M = V • Р = H • S • Р (C, T) = kH-1 • H,(6)
где kH - 1 = S • p 0, считая в условиях стабилизации концентрации C и температуры T р ( C , T ) = р0 = const .
Тогда ММ АПР как ОУ в выбранных ПС будет представлена системой ДУ в форме Коши следующего вида:
Х1 = kH • и1 + kH • и2 - kH • v1,(7)
X ид • v x2 = -kH • — •(u1 + и2 ) + kH • ——- .(8)
x 1 x 1
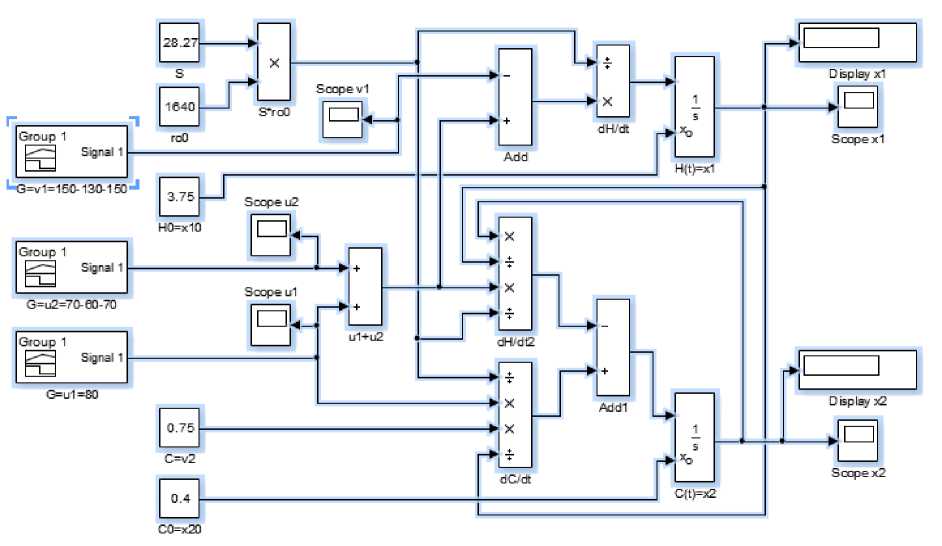
Анализ системы ДУ (7, 8) показывает, что первое ДУ (7) является линейным и определяет для канала управления уровнем свойство астатизма первого порядка. Однако второе ДУ (8) является существенно нелинейным. Поэтому динамические свойства АПР исследованы с использованием схемы имитационного моделирования, приведенной на рис. 2, а. Эта схема послужила также моделью при исследовании динамических свойств системы автоматического управления АПР.
Информатика, вычислительная техника и управление
а)
Signal 1[
(z2-x2)*2
Dis play x1
Gro up 1
Signal
Scope x1
{v2-x2)/v2
*{v2-x2)/v2
Dis play x2
Scope x2
б)
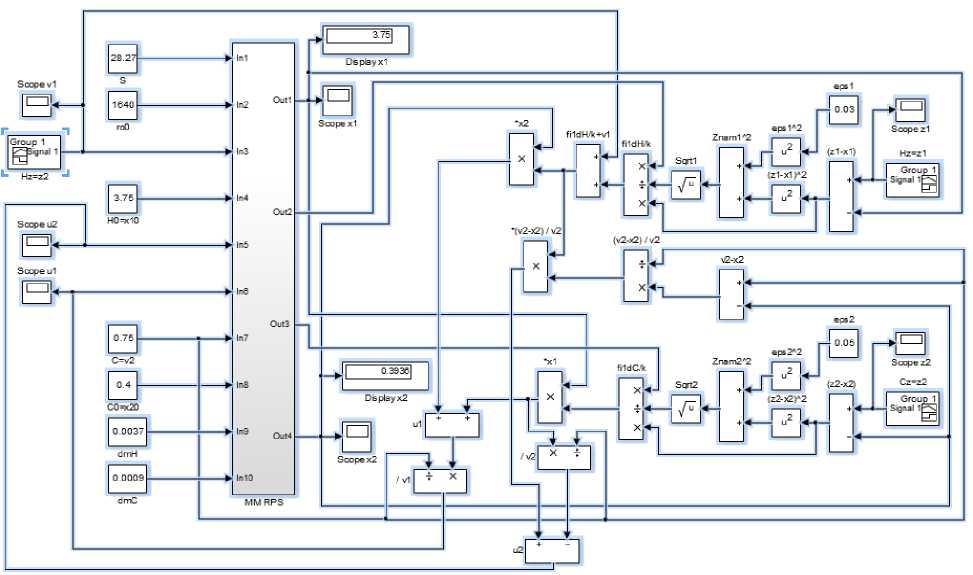
Рис. 2. Схемы имитационного моделирования: АПР как объекта управления (а); САУ АПР (б)
Очевидно, что процедура синтеза законов управления АПР при существенной нелинейности составляющей (8) его ММ неординарна и требует индивидуальных исследований. Это особенно актуально в связи с очевидными ограничениями на величины управляющих потоков G C и G 0 , существующими в реальных технологических схемах при высоких требованиях к точности поддержания концентрации и быстродействию подавления ошибок управления. Последнее обусловлено необходимостью поддержания максимальной производительности АПР в рамках реальных конструктивных и технологических ограничений [5, 8, 11].
Синтез двумерного закона квазиоптимального управления АПР. В предыдущем разделе получена ММ АПР в виде системы ДУ (7) и (8), характеризующейся сложным взаимодействием переменных состояния, управляю-
щих и возмущающих воздействий. Поскольку управлению подлежат две ПС, управление должно быть также двумерным, т.е. векторным. Для синтеза такого управления с учетом сформулированной выше постановки задачи можно воспользоваться подходами, предложенными для различных приложений в работах [5, 8, 11, 12, 13, 14, 15, 16]. Анализ представленных источников позволяет выделить два подхода. Суть первого из них состоит в формировании закона управления объектом на основе желаемой (или эталонной) ММ проектируемой САУ. Суть второго подхода состоит в формировании форсированного закона изменения производных ПС эталонной ММ САУ с гарантированным ограничением по амплитуде. Так, в соответствии с парадигмой этого подхода можно задаться системой желаемых ДУ [15, 16], причем в виде, предложенном в [13, 14]:
-
x i = x 2 ;
x 2 = a m 2 • [ z - ( x i + Ц • x 2 ) ] .
V [ z - ( x , + И • x 2 ) ] + 0 2
Однако такое решение неприменимо к объекту, описываемому ММ (7), (8), т. к. ПС x 1 и x 2 имеют кардинально отличающиеся размерности. Приведение их к единой размерности требует применения размерного коэффициента, величина которого не определена. Кроме того, математическая структура системы (9) не содержит совершенно необходимой в случае управления АПР переменной — задания по уровню z 1 . Поэтому в данном случае неэффективно преобразование базовой ММ 2-го порядка в ММ открытой системы с внешним управлением по аналогии с [14] построением макропеременной, играющей в схеме роль условной комбинированной ошибки регулирования в виде x ^ ( z , x 1 , x 2 ) = z - ( x 1 + ц2 • x 2 ) , где ц 2 — коэффициент согласования ПС.
В связи с этими особенностями ММ ОУ целесообразно отказаться от исходной парадигмы подхода к синтезу квазиоптимального по быстродействию управления для объектов второго порядка, сформулированной в [13, 14]. Анализ уравнений (7–8) показывает, что можно задаться системой желаемых ДУ, распадающихся на два независимых нелинейных уравнения первого порядка вида, предложенного еще в [11, 12]:
x i =
d m • ( z i - x i )
x 2 =
d m • ( z 2 - x 2 )
где d mH , d mC — технологические ограничения на скорость изменения уровня и концентрации соответственно; z 1 —
задание по уровню; z 2 — задание по концентрации; £ 1 и £ 2 — так называемая степень квазиоптимальности управления [12, 13].
Это тем более целесообразно, что обе ПС (и уровень x 1 , и концентрация x 2 ) технологически независимы и быстродействие управления каждой из них желательно с точки зрения максимальной производительности АПР.
Отождествление правых частей уравнений (7) и (10) позволяет получить следующее промежуточное уравнение, связывающее оба технологически обусловленных управления с технологически обусловленной переменной состояния — уровнем x 1 , технологически заданным его значением z 1 и производительностью АПР v 1 :
dmH и + Un —--- kH
•
( z i - x 1 )
+ Ч.
Аналогично отождествление правых частей уравнений (8) и (11) позволяет получить другое промежуточное уравнение, связывающее оба технологически обусловленных управления с технологически обусловленной переменной состояния — концентрацией x 2 , технологически заданным его значением z 2 и концентрацией сырьевого потока
v 2 :
U 1 + и 2
C u i • v2 d m
— x 2 kH
x i ( z 2 - x 2 )
-----. == x 22
( z 2 x 2 i + о 2
Информатика, вычислительная техника и управление
Приравнивая правые части (12) и (13), можно выразить управление u 1 (сырьевой поток) в следующем виде:
Ui =-- v2
dm Y ( z i - x )
x 2 '
kH ^( z i - x i ) 2 + 6 2
. dC „ ( z 2 - x 2 )
+--- X i — I
^H ( zz 2 - X 2 ) + 6 2
+ V i ■ x 2
Подстановка (14) в (12) позволяет получить выражение для второго управления u 2 (потока растворителя):
и 2 = d m ( z - x ) /i - x )_ d m x ( z 2 - x 2 ) + V ^f i - ^} (i5)
k H ^ ( Z i - X i ) 2 + 6 2 I V 2 J k m V 2 ^ ( z 2 - x 2 ) 2 + e 2 I V 2 J
Выражения (14) и (15) задают векторный закон управления (ЗУ) для АПР по каналам задания уровня и концентрации. Схема имитационного моделирования САУ АПР приведена на рис. 2, б. На этой схеме модель самого АПР представлена блоком (Subsystem) MM RPS.
f u i )
Существенная нелинейность и структурная громоздкость векторного управления АПР u = I I, сформиро-( u 2 J ванного в соответствии с парадигмой, заданной уравнениями (10–11), оправдывается тремя факторами.
об об
-
i. Управление обеими переменными состояния (уровнем H = x i и концентрацией готового раствора С = x 2) осуществляется обоими управляющими воздействиями (сырьевым потоком раствора высокой концентрации об об
-
2. Обе переменные технологического состояния x 1 и x 2 регулируются независимо друг от друга, т. е. процесс регулирования уровня не оказывает влияния на процесс стабилизации концентрации, и наоборот.
-
3. Обе переменные технологического состояния x 1 и x 2 регулируются и стабилизируются независимо от
GC = u i и потоком растворителя G 0 = и 2 ). Таким образом обеспечивается максимальное использование ресурса управления (это важно в связи с существенным ограничением величины потока в реальном трубопроводе с реальным регулирующим органом).
об нагрузки на АПР G = vi, которая представляет собой производительность аппарата, обеспечивающего раствором стабильной концентрации последующие аппараты технологической цепочки.
Эти свойства иллюстрируются рисунками 3, 4 и 5.
На верхнем скриншоте рис. 3 показана последовательная смена задания (Scope z 1) на уровень в АПР. На следующих двух скриншотах проиллюстрированы управляющие воздействия (Scope u 1, u 2), обеспечивающие смену уровня. Видно, что выход на новый уровень обеспечивается параллельным изменением смешиваемых потоков. Поэтому четвертый скриншот (Scope x1) показывает переходный процесс интенсивного изменения уровня, длящийся не более 2 минут, а последний (Scope x2) подтверждает обеспечение неизменности концентрации, т. к. векторный ЗУ f u i )
и = I I обеспечивает изменение потоков в пропорции, обусловленной заданной концентрацией.
( u 2 J
На рис. 4 верхний скриншот (Scope z 2) показывает последовательную смену задания на концентрацию приготавливаемого раствора. Второй и третий скриншоты (Scope u 1, u 2) иллюстрируют соответствующие изменения управляющих воздействий. Четвертый скриншот (Scope x 1) подтверждает, что уровень при управлении концентрацией остается неизменным (управление обеспечивает одинаковые и противоположные по знаку изменения входных потоков). Последний скриншот (Scope x 2) демонстрирует переходный процесс изменения концентрации, также достаточно интенсивный.
Таким образом, имитационное моделирование процессов управления функционированием АПР по различным каналам подтвердило функциональность и эффективность исходной парадигмы автономного, квазиоптимального по быстродействию и согласованного управления технологическими переменными состояния.
На рис. 5 продемонстрирован эффект от введения в векторный ЗУ переменной v 1 - (Scope v 1). Управляющие воздействия u 1 и u 2 на экранах (Scope u 1) и (Scope u 2) меняются синхронно с нагрузкой v 1 и обеспечивают независимость технологического состояния аппарата от его производительности. Это иллюстрируют осциллограммы на экранах Scope x1 и Scope x2. Полученные в ходе аналитических исследований и преобразований, а также в ходе имитационного моделирования автоматической системы взаимно инвариантного векторного управления технологическим состоянием аппарата приготовления раствора результаты позволили сделать изложенные ниже выводы.
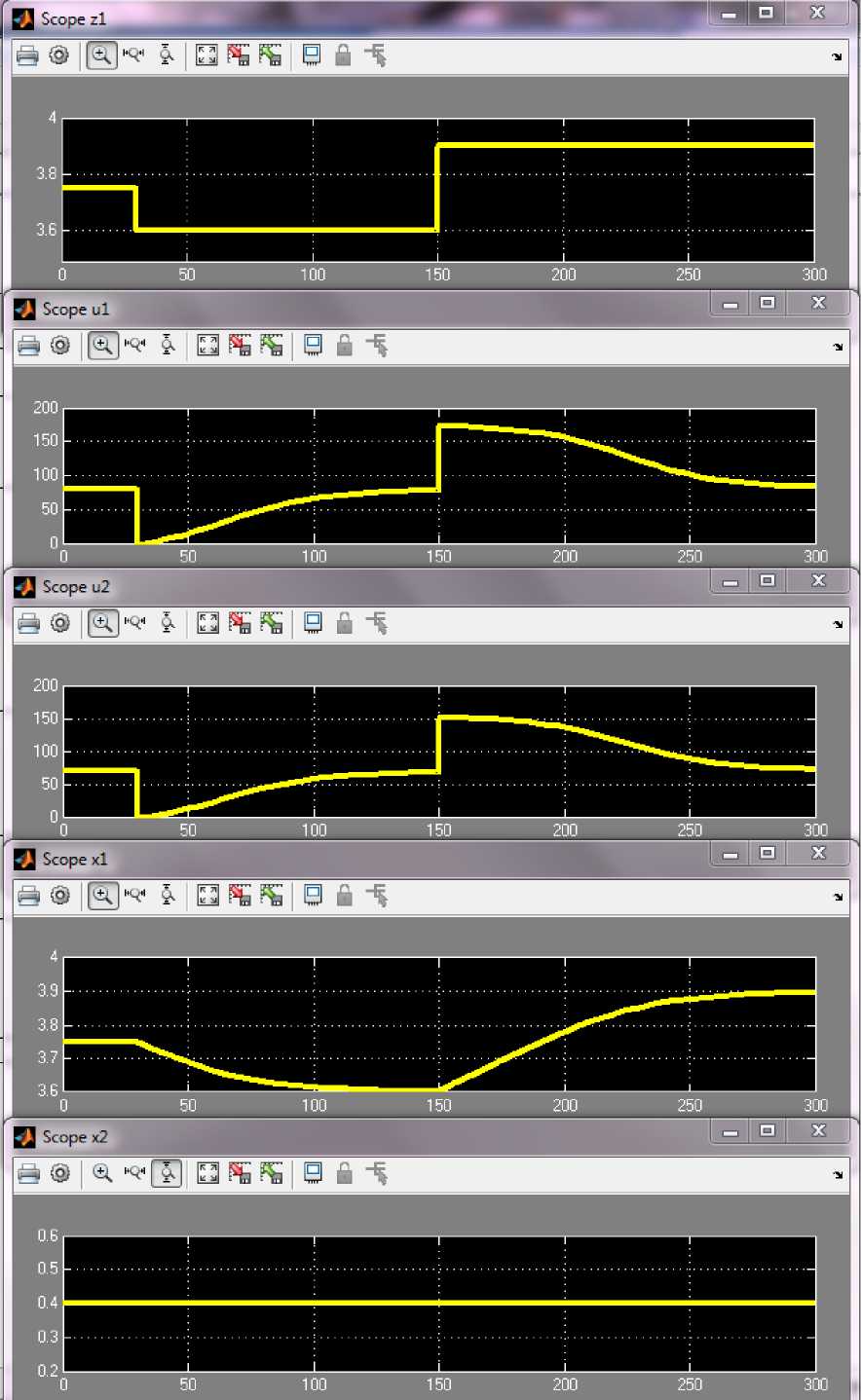
Рис. 3. Переходные процессы изменения уровня в АПР
Информатика, вычислительная техника и управление
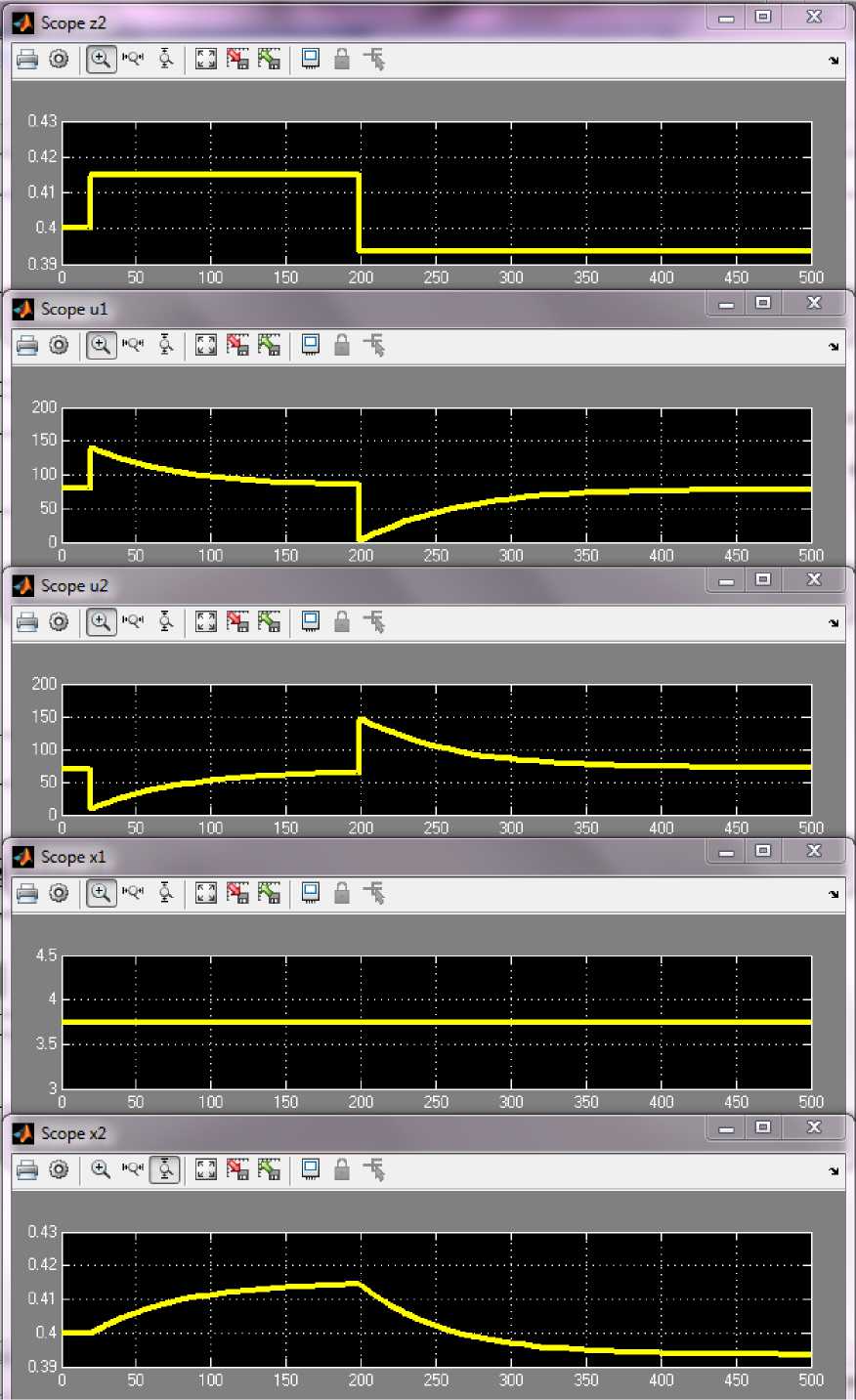
Рис. 4. Переходные процессы изменения концентрации в АПР
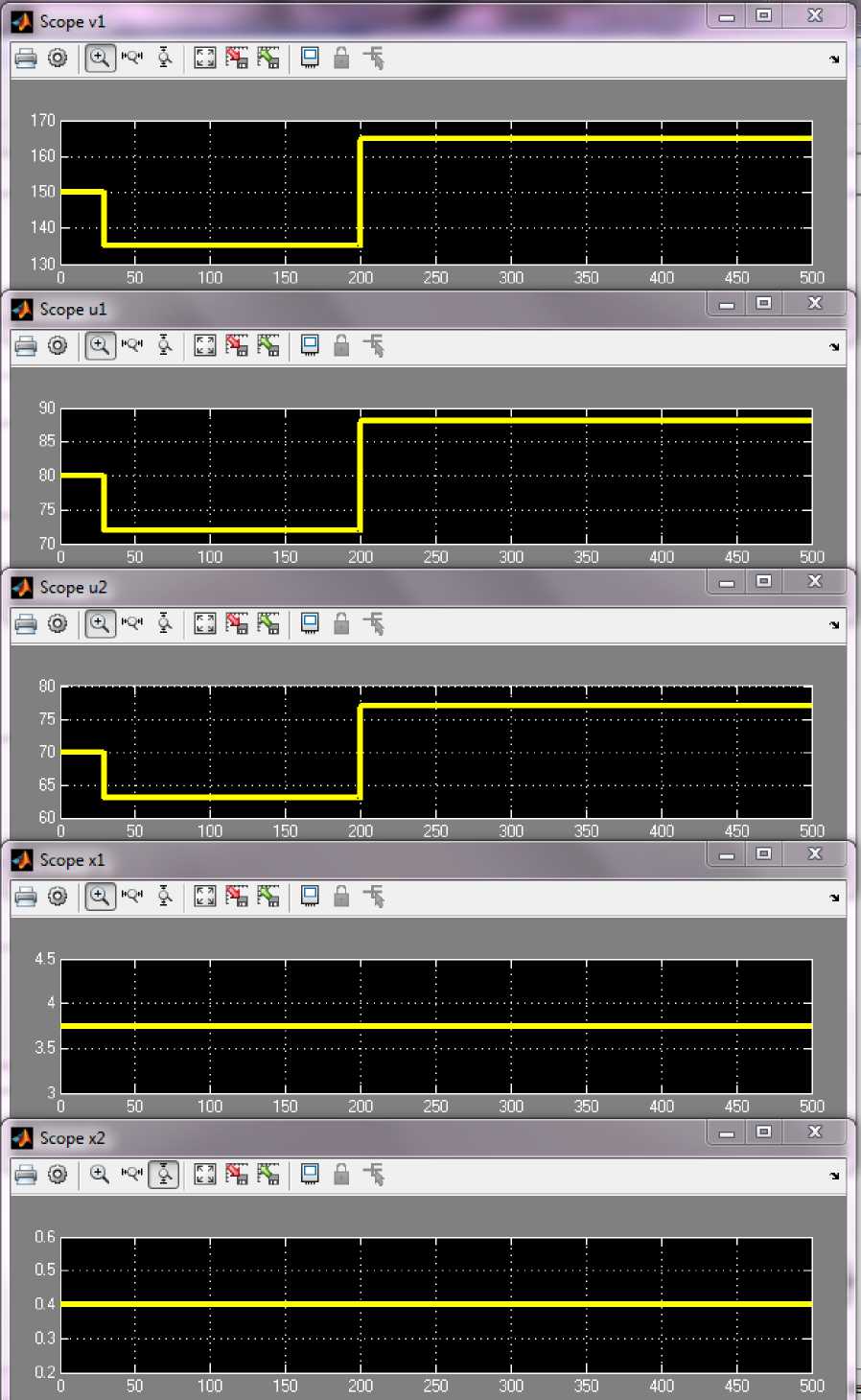
Рис. 5. Переходные процессы при изменении производительности АПР
Информатика, вычислительная техника и управление
Выводы.
-
1. Полученный в ходе проведенной работы векторный двухвходовый закон управления показал высокую эффективность решения задачи управления основными переменными технологического состояния аппарата приготовления раствора. Удалось достичь следующих результатов:
-
— более полное, по сравнению с одноконтурными системами регулирования, использование ресурса управления за счет одновременного и согласованного воздействия на управляемую переменную по каналам всех влияющих входов;
-
— обеспечение независимости контуров управления переменными технологического состояния аппарата приготовления раствора — как друг от друга, так и от внешних возмущений.
-
2. Сочетание идеологии синтеза законов управления на основе желаемых или эталонных математических моделей проектируемых систем с идеологией квазиоптимизации быстродействия управления можно считать перспективным подходом к задачам построения систем векторного управления многосвязными нелинейными объектами для обеспечения взаимной независимости и высокой интенсивности управления их переменными состояния.
Список литературы Автоматическая система взаимно инвариантного векторного управления переменными технологического состояния аппарата приготовления раствора
- Фёдоров, А. Ф. Системы управления химико-технологическими процессами/А. Ф. Фёдоров, Е. А. Кузьменко. -Томск: Изд-во Томского политехнического университета, 2009. -213 с.
- Решетняк, Е. П. Системы управления химико-технологическими процессами/Е. П. Решетняк, А. К. Алейников, А. В. Комиссаров. -Саратов: Саратовский военный институт биологической и химической безопасности, 2008. -416 с.
- Беспалов, А. В. Системы управления химико-технологическими процессами/А. В. Беспалов. -Москва: Академкнига, 2007. -690 с.
- Бородин, И. Ф. Автоматизация технологических процессов/И. Ф. Бородин, Ю. А. Судник. -Москва: КолосС, 2004. -344 с.
- Нейдорф, Р. А. Теория автоматического управления в технологических системах: учебное пособие/Р. А. Нейдорф, Н. С. Соловей. -Ухта: Институт управления, информации и бизнеса, 2005. -212 с.
- Решетняк, Е. П. Электронный конспект лекций по дисциплине АСУТП/Е. П. Решетняк. -Саратов: СГАУ, 2009. -213 с.
- Нейдорф, Р. А. Моделирование химико-технологических процессов на микро-ЭВМ: учебное пособие/Р. А. Нейдорф, А. В. Ситников. -Новочеркасск: НПИ, 1986. -88 с.
- Нейдорф, Р. А. Инварианты объектов синергетического управления в химической технологии/Р. А. Нейдорф//Современная прикладная теория управления. Ч. III. Новые классы регуляторов технических систем/Под ред. А. А. Колесникова. -Таганрог: Изд-во ТРТУ, 2000. -С. 238-256.
- Математическое моделирование химико-технологических процессов: учебное пособие/А. М. Гумеров . -Казань: Изд-во Казанского государственного технологического университета, 2006. -216 с.
- Параметрическая идентификация трудноопределимых констант математических моделей автоматизированных систем участков магистральных газопроводов/Р. А Нейдорф //Вестник Дон. гос. техн. ун-та. -2012. -№ 2 (63), вып. 2. -С. 56-61.
- Мохсен, М. Н. Синтез законов квазиоптимального управления технологическими объектами первого порядка /М. Н. Мохсен, Р. А Нейдорф//Инженерный вестник Дона. -2015. -№ 4. -Режим доступа: http://ivdon.ru (дата обращения: 15.01.16).
- Нейдорф, Р. А. Нелинейное ускорение динамических процессов управления объектами первого порядка с учетом ограниченности воздействий/Р. А. Нейдорф//Вестник Дон. гос. техн. ун-та. -1999. -С. 13-21.
- Синтез законов управления в технических системах: учебное пособие. Ч. 1. Инженерные методы синтеза законов управления в технических системах по эталонным математическим моделям/Р. А. Нейдорф ; под общ. ред. Р. А. Нейдорфа, З. Х. Ягубова. -Ухта: УГТУ, 2000. -168 с.
- Нейдорф, Р. А. Инженерные методы синтеза автоматических систем управления: учебное пособие/Р. А. Нейдорф, Н. С. Соловей; под общ. ред. Р. А. Нейдорфа. -Ухта: УГТУ; Ростов-на-Дону: РГАСХМ, 2004. -255 с.
- Нейдорф, Р. А. Эффективная аппроксимация кусочных функций в задачах квазиоптимального по быстродействию управления/Р. А. Нейдорф//Математические методы в технике и технологиях -ММТТ-2000: сб. тр. междунар. науч. конф. -Санкт-Петербург, 2000. -Т. 2. -С. 18-22.
- Neydorf, R. Synthesis of Time Quasi-Optimal Asymptotically Stable Control Laws /R. Neydorf//SAE International. -2015. -15 сентября. -Режим доступа: http://papers.sae.org/2015-01-2481 (дата обращения: 20.01.16).
