Автоматическое планирование траектории полёта летательных аппаратов при авиахимической обработке полей

Автор: Паршин Дмитрий Яковлевич, Копкин Андрей Сергеевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 1-2 (62) т.12, 2012 года.
Бесплатный доступ
Изложены методы планирования и расчёта траектории движения сверхлёгкого летательного аппарата при проведении авиахимических работ. Предложены методы коррекции и преобразования координат, получаемых со спутниковой навигационной системы, и упреждающего сглаживания для исключения влияния инертности системы «пилот — летательный аппарат».
Автоматическое планирование, авиахимические работы, параллельное вождение, снос химикатов
Короткий адрес: https://sciup.org/14249780
IDR: 14249780 | УДК: 681.518.3:632.982
Automated planning of flight trajectory under crop dusting
Microlight trajectory scheduling and prediction methods for crop dusting are given. The techniques of the correction and transformation of coordinates from the satellite navigation system, and of the advanced smoothing for excluding the inertia affection of the ‘pilot — microlight’ system, are offered.
Текст научной статьи Автоматическое планирование траектории полёта летательных аппаратов при авиахимической обработке полей
Введение. В настоящее время при химической обработке полей всё чаще используется малая авиация, что обусловлено высокой скоростью проведения работ, их большими объёмами, низкой стоимостью гектара обработанной площади. Однако проведение авиахимической обработки полей является сложным и зачастую опасным видом работ, требующим применения специальных систем контроля и регулирования, которые должны обеспечивать параллельное вождение летательного аппарата с требуемой точностью при внесении химических веществ, с учётом бокового ветра и корректировкой траектории для достижения наилучшего результата [1]. Существующие системы параллельного вождения ориентированы на наземную технику, и применение их в авиации ограниченно. В данной статье авторами предлагается опорно-эквидистантный метод корректировки траектории движения летательного аппарата, позволяющий формировать направление движения на основе задания опорной и последовательного построения эквидистантных ей траекторий по четырём точкам.
Основой для планирования и корректирования является спутниковая навигационная система ГЛОНАСС/GPS. Очевидным является тот факт, что используемая в данных системах геостационарная система координат не подходит для реализации требуемой задачи, т. к. обладает излишней информативностью и существенно усложняет вычислительные операции [2]. Также имеет место ряд специфических особенностей систем навигации, которые могут значительно ухудшить результаты расчёта либо сделать их некорректными.
При расчёте траектории полёта необходимо учитывать инерцию летательного аппарата и время реакции пилота — в противном случае возможно возникновение автоколебаний системы «пилот — машина», также приводящих к ухудшению результата. Предлагаемый алгоритм учитывает все вышеописанные особенности управления воздушным судном при проведении авиахимических работ, что позволит уменьшить погрешности обработки, существенно снизить потери урожая, а также наносимый окружающей среде вред.
Метод упрощённого преобразования координат. Для измерений необходимо определить систему координат, в которой будут проводиться расчёты. Наиболее целесообразно использовать декартову систему координат с началом в первой полученной точке обрабатываемого поля, а координатами следующих точек считать их отклонения от нового начала. Далее необходимо произвести преобразование размерностей полученных точек из геоцентрической системы координат в метрическую систему:
у =у -1849,1, х = х -40075695,3-cos)/360,
7 НОВ * ГЦ • * НОВ ГЦ ^/ Гц д[ N^w / где хН0Б,хгц, уН0Б,угц — абсциссы и ординаты точки в метрической и геоцентрической системах координат.
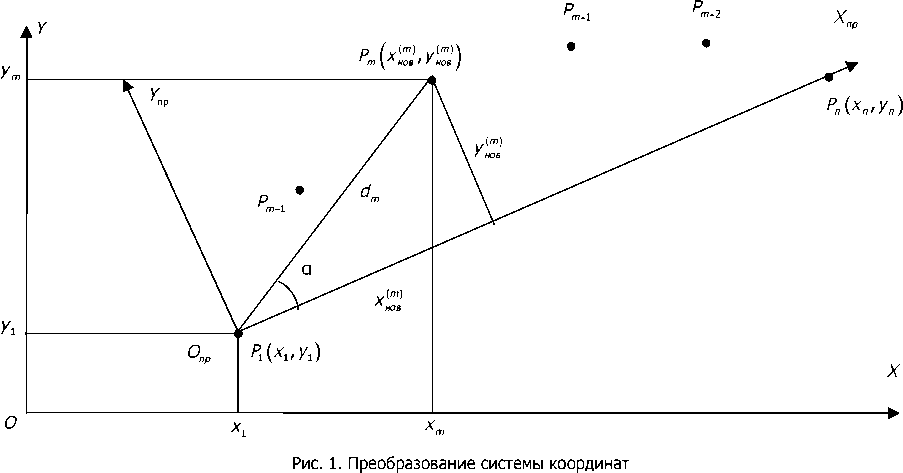
Основными параметрами траектории первого гона являются начальная О1(х1,у1) и конечная On (хп,уп^ точки. Начало координат в новой связанной системе отождествляется с первой сохранённой точкой О1(х1,у1), при этом ось абсцисс направляется вдоль линии, соединяющей первую и последнюю точку, а ось ординат — ортогонально к ней в направлении формирования правой системы координат (рис. 1).
Уравнение прямой, проходящей через указанные точки /^(^zKi) и Рп(хп,у„), запишем в виде (ут-у„)х + (х„-xjy + (х1у„-xny^ = 0. Так как первая точка является началом координат, то коэффициенты в уравнении прямой Дх + BYy +CY = 0 будут следующие: Д = —yn,BY = х„, Q = 0. Эта прямая является осью абсцисс системы координат ХпрОпрУпр. Так как ось ординат расположена ортогонально, то отклонения точек от прямой PYPn являются их ординатами. Расстояние от точки Рт (х^Унов) до оси Хпр вычисляется следующим образом:
17(т) _ А.Хт + ^\Ут + Q 'нов т '
или при Q = О
Абсцисса х^в рассматривается как расстояние между началом координат и перпендикуляром, опущенным из точки на прямую PYPn , и составляет
где dm — расстояние PYPm
Знак отклонения определяется по знаку угла между прямыми PYPm : Дх + BYy *CY = 0 и PYPn: Apt + Вгу + С2 = 0, в соответствии с уравнением:
А В, - АВ, а = arctg—2—
Для того чтобы определить знак отклонения, необходимо сравнить знаки полученного угла и у^ . Если эти знаки совпадают, то абсцисса в новой системе координат положительна, в противном случае — отрицательна.
Корректировка координат навигационной системы. Одной из особенностей современных систем позиционирования является наличие так называемых «скачков позиции» вследствие влияния различных помех, в том числе ионосферных искажений, эффекта многолучевого распространения и др. Как показали исследования, при статическом позиционировании разброс значений достигает 2—5 метров. При проведении авиахимических работ скачки координат могут внести существенную погрешность в измерения текущего положения техники и привести к значительному ухудшению качества выполняемых работ. Однако данные скачки координат можно корректировать. Предлагается метод корректировки, основанный на измерении ускорения движения летательного аппарата. Частота поступающих данных с навигационной системы равна 5 Гц, следовательно, время Тд между расчётами не превышает 0,2 с. В этом случае ускорение г, развиваемое техникой на данном интервале времени, составляет г = (1/„ - Vm) ■ 5, где Vm, Vn — скорости, измеренные на предыдущей и текущей итерациях соответственно.
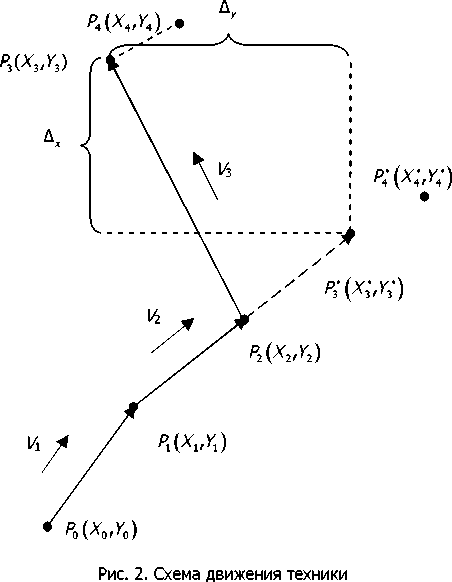
При авиахимических работах требуется максимально линейное движение летательного аппарата с постоянной скоростью. При возникновении скачка расчётное ускорение может иметь значительную величину (рис. 2, точка Р3 ). При движении техники с навигационной системы поступают сигналы о рассчитанном текущем местоположении летательного аппарата № Го), (X, Г), (X, Г2), (X, Г). В каждый момент времени позиционирования текущая скорость движения техники в Ай точке равна
где / = 1,2, 3, 4 — номер точки.
Для обнаружения ошибки позиционирования, т. е. выявления фактического скачка, следует при каждом новом поступлении координат с навигационной системы производить расчёт ускорения и проверять условие е, < едоп, где ет — текущее значение ускорения техники, едоп — допустимое ускорение техники. При невыполнении этого условия необходимо корректировать расчётное местоположение. Для этого полагаем, что движение происходило в том же направлении и с той же скоростью, тогда отклонения по координатам для рассматриваемого случая составляют бх = X, - ^ , бх=К2-К1 . В этом случае координаты истинного положения точки Р3* Qc^.Y^ равны Х3* = Х2+бх, Y* = К, + бк , а величина ошибки позиционирования по координатам составит Л - Y* - Y Л -Y* - Y
Общая ошибка позиционирования по координатам определяется суммой текущей и предыдущей ошибок 5т, 5П/: 5Х = 5т + Дх, дк = Зпу + Дк. При расчёте текущего местоположения на последующих итерациях в случае отсутствия скачка координаты текущего местоположения корректируются на величину общей ошибки позиционирования X* = ХА + 5Х, Y* = YA+dy. Если же обнаружен скачок, то необходимо производить коррекцию, описанную выше.
Планирование траектории движения. В результате записи первого гона и проведения преобразования координат формируется массив точек Рт (х^.у^А, который является основой для опорно-эквидистантного метода планирования направления движения летательного аппарата. Учитывая, что расположение точек имеет неравномерный дискретный характер, для обеспечения расчёта требуемой траектории движения в реальном времени необходимо производить интерполяцию данных методом наименьших квадратов Гаусса. Использование этого метода интерполяции связано с определёнными ограничениями. Ввиду нелинейности характера траектории движения летательного аппарата, а также из-за погрешностей позиционирования навигационной системы применять интерполяцию по всем данным нецелесообразно. Интерполяционная кривая, построенная по всем точкам траектории, требует значительных вычислительных мощностей и не подхо дит для применения в малых микропроцессорных системах.
Поэтому при расчёте требуемой траектории движения предлагается использовать 4 ближайшие точки из массива точек первого гона Рт (х^.у^Л, при этом внутренние две точки ис пользуются непосредственно для расчёта отклонения, а внешние — для задания характера интерполяционной кривой (рис. 3).
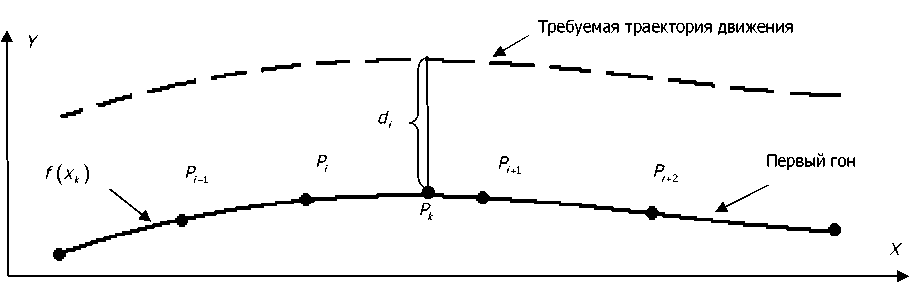
Рис. 3. Расчёт требуемой траектории по рабочим точкам
Для определения интервала последовательно просматриваются все точки массива, и если значение абсциссы находится в пределах точек Р,Р,+1, тогда этот интервал принимается за искомый. После определения рабочего интервала берутся крайние точки интервала Р;Р!+1, а также точка Р^ и точка Р,+2, если таковые имеются. В случае отсутствия Ри и Р,+2 используются точки ^+1 и ^ 2 соответственно. Далее в процессе движения летательного аппарата рассматриваются только лишь шесть точек массива — выбранные ближайшие четыре (рабочие точки), а также следующая за ними, и предшествующая им (вероятные точки), если таковые имеются. В каждый мо- мент времени рассчитывается расстояние от текущей ординаты до всех точек, и если определяется, что расстояние до какой-либо вероятной точки меньше расстояния до рабочей точки, то происходит смещение основных точек в её сторону.
Для того чтобы максимально упростить деятельность эксплуатанта сельскохозяйственной техники и систематизировать значения координат обработанных участков, целесообразно определять сторону обработки (гон слева или справа).
Так как число рабочих точек равно четырём, то интерполяционная кривая представляет собой кубический сплайн. При расчёте отклонения необходимо рассчитать расстояние от интерполяционной кривой до текущей точки: d. = yk -f(xk^, где ук — ордината текущей точки Рк, f(xk) — интерполяционная кривая, построенная по четырём рабочим точкам для точки Р,.
Найденное расстояние d, представляет собой текущее отклонение летательного аппарата от первоначальной траектории движения. Для нахождения полосы обработки и отклонения от неё вычисляется число полуполос ппп для задания ширины захвата /, которые содержит в себе отклонение: ппп = 2djl. Необходимость расчёта не полос, а полуполос обусловлена тем, что отсчёт ведётся от середины захвата, а не от его начала. Далее определяется номер полосы, по которой происходит движение в текущий момент времени: п„ = 0,5(ппп +1). После определения номера текущего гона (полосы обработки) рассчитывается ошибка отклонения движения техники: ^пол = 4 -1-Пп.
Полученное отклонение может служить основой корректировки курса летательного аппарата при проведении авиахимических работ. Однако, ввиду высокой скорости перемещения летательного аппарата, его инертности, времени реакции пилота, а также дискретности поступающих данных, вождение по текущему отклонению может усложнить пилотирование и привести к колебательному процессу обработки полей. В связи с этим предпочтительным является прогнозирование положения летательного аппарата на основе истории его движения, т. е. выполнение коррекции на основе экстраполяции траектории его движения. Для расчёта будущего положения используются координаты трёх предыдущих точек движения, по которым методом численной интерполяции строится парабола движения. После этого выполняется экстраполяция функции с шагом равным, среднему шагу используемых точек: х6уд = хг + (^-х^/2, у6уд = f(х6уд), гдехих2,х3 — абсциссы используемых точек движения; f(x6№) — интерполяционная кривая, построенная по этим точкам.
Выводы. Авторами предложен алгоритм автоматического планирования и корректировки траектории полёта летательных аппаратов при авиахимической обработке полей. Особенностями данного алгоритма являются ориентированность на сверхлёгкие летательные аппараты, учёт влияния бокового ветра на величину и снос рабочей полосы обработки поля. Отличительной чертой предложенного алгоритма также является использование алгоритмов сглаживания, ориентированных на устранение колебательности при корректировке отклонения от требуемой траектории движения, вызванной инертностью летательного аппарата и задержками в реакции пилота. Применение предложенного алгоритма на практике позволит существенно повысить качество химической обработки полей путём исключения грубых ошибок обработки, а также уменьшить вредное влияние на окружающую среду.
Список литературы Автоматическое планирование траектории полёта летательных аппаратов при авиахимической обработке полей
- Дудник, В. В. Упрощённая модель визуализации осаждения капель при проведении авиахимических работ с использованием вертолёта/В. В. Дудник//Научный вестник Московского государственного технического университета гражданской авиации. -2011. -№ 163. -С. 191-198.
- Grewal, M. S. Global Positioning System, Inertial Navigation, and Integration/M. S. Grewal, L. R. Weill, A. P. Andrews. -Second edition. -New York: John Wiley & Sons, 2007. -552 p.
