Автоматизация трёхкоординатного испытательного стенда

Автор: Нгуен К.Х., Ткаченко В.В., Буй Х.Т.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Механика
Статья в выпуске: 2 (50) т.13, 2021 года.
Бесплатный доступ
Представлены результаты разработки трёхкоординатного испытательного стенда для экспериментов в аэродинамических трубах. Основное внимание обращено на имитационное моделирование и виртуальный эксперимент, позволяющие демонстрировать работу системы в динамике и управлять динамическим испытательным стендом с помощью программ SolidWorks, LabVIEW, MATLAB-Simulink, которые применяются для процесса проектирования автоматизированной системы.
Автоматизированная система управления, имитационное моделирование, шаговый двигатель, испытательный стенд
Короткий адрес: https://sciup.org/142231487
IDR: 142231487 | УДК: 681.516.7 | DOI: 10.53815/20726759_2021_13_2_58
Automation of a 3-axis test bench
This paper presents the results of the development of a three-dimensional test bench for experiments in wind tunnels. The main attention is paid to simulation and a virtual experiment, which allow demonstrating the system’s operation in dynamics and controlling a dynamic test bench using SolidWorks, LabVIEW, MATLAB-Simulink software, which are used for the process of designing an automated system.
Текст научной статьи Автоматизация трёхкоординатного испытательного стенда
В 2011 году в Центр аэромеханики и летательной техники МФТИ была, передана, из военно-воздушной инженерной академии имени Н. Е. Жуковского аэродинамическая труба. (АДТ) АТ-3. Аэродинамическая труба имеет закрытую рабочую часть и позволяет создавать поток со скоростью до 25 м/с.
На УНИЦ АЛТ идет постоянное обновление лабораторной базы для аэродинамического эксперимента по направлениям средств измерения и автоматизации эксперимента для повышения его эффективности и точности и в конечном счете качества, обучения. В качестве примера, можно привести проведенную автоматизацию управления испытательным стендом и системы измерения. Данная проблематика, имеет значение для обучения студентов, также служит источником тем научных работ. Выполнение лабораторных работ студентами является важным средством более глубокого усвоения и изучения учебного материала, а также приобретения практических навыков по экспериментальному исследованию и обращению с современными средствами управления.
В работе [8] автоматическая система, управления испытательным стендом с одной степенью подвижности в пространстве создана, для измерения аэродинамических параметров. Однако автоматизация системы управления стендом по трём направлениям в пространстве
в данной работе не была реализована. В настоящее время стенды с различивши степенями подвижности в пространстве применяются на основе автоматических систем [7, 9].
Фактически, испытательные стенды, управляющиеся шаговыми двигателями по координатам, уже есть в наличии. При этом модернизация лабораторного оборудования обычно не предусматривается производителем. В лаборатории АТ-3 имеется трёхкоординатный испытательный стенд, который представляет собой пространственную структуру с тремя степенями подвижности, каждая из которых управляется своим исполнительным приводом. Этот стенд подходит для аэродинамических экспериментов с требованиями перемещения по трём координатным осям. Целью проекта является создание автоматической системы управления трёхкоординатным испытательным стендом для экспериментов в аэродинамических трубах на основе предварительного подробного анализа его работоспособности с помощью современных программ моделирования.
2. Постановка задачи
На кафедре имеется трёхкоординатный испытательный стенд (рис. 1), который представляет собой сложную пространственную структуру с тремя степенями подвижности, каждый из которых управляется своим исполнительным приводом.

Рис. 1. Трёхкоординатный испытательный стенд
Системы приводов с шаговыми двигателями РН265-04В компактны, достоверны и надёжны, они функционируют и в неблагоприятных условиях. Поскольку у испытательного стенда нет системы управления, необходимо создать автоматизированную систему управления испытательным стендом для эксперимента в АДТ АТ-3. Структура автоматизированной системы управления приведена на рис. 2.

Рис. 2. Структура, автоматизированной системы управления
Ключевые функции компонентов автоматизированной системы управления определяются следующим образом:
-
- пульт управления и индикации - реализованные на одной рабочей панели средства управления объектом, в том числе отображения данных о режимах работы системы;
-
- интерфейс входной - средства приема и последующего преобразования сигналов, поступающих от датчиков в формат, приемлемый для дальнейшего использования;
-
- интерфейс выходной - средства преобразования данных, полученных на выходе системы в цифровые или аналоговые сигналы управления конечными устройствами;
-
- контроллер - ключевой компонент системы, выполняющий алгоритмы получения и обработки данных, также осуществляет обмен командами с средствами управления.
Автоматизированная система управления испытательным стендом должна выполнять следующие функции:
-
- прием различных сигналов, как правило, в аналоговой форме, с трёхкоординатного испытательного стенда;
-
- выдачу на исполнительный привод стенда управляющих сигналов (положения и скорости движения стенда в пространстве);
-
- преобразование аналоговых сигналов в цифровые и обратно;
-
- обработку информации в компьютере;
-
- визуализацию информации в удобном виде для экспериментатора.
Общие требования к устройству управления лабораторным стендом:
-
- состоит из минимального количества элементов;
-
- имеет высокую степень ремонтопригодности;
-
- имеет низкую себестоимость;
-
- отсутствие программируемого микроконтроллера;
-
- программный интерфейс управления расположен на ПК.
Система должна работать следующим образом:
- все режимы, заданные оператором, рассчитываются на компьютере (направление, скорость, траектория движения стенда);
- данные поступают в контроллер, в нём сигналы проходят через микросхемы жесткой логики и подаются на драйвер;
- плата драйвера шагового двигателя формирует сигналы, которые подаются на обмотки статора шагового двигателя.
3. Моделирование автоматизированной системы управления стендом3.1. Создание модели испытательного стенда в среде SolidWorks
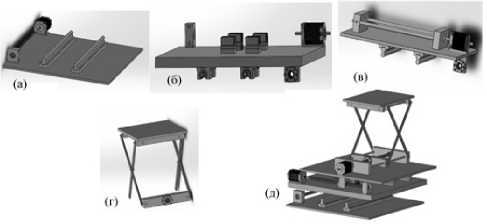
Рис. 3. Модель испытательного стенда, в среде Solidworks
ЗП-модели САПР испытательного стенда, включают:
-
- первая часть (а) — это неподвижная часть;
-
- вторая часть (б), движущаяся поступательно по сравнению с первой; третья часть (в), движущаяся поступательно относительно второй;
-
- четверная часть (г), на. которой можно установить модель летательного аппарата, или датчики, аналогична, модели подъёмного стола.
-
- окончательная сборка (д) для испытательного стенда, соответственно (как показано на рис. 3).
-
3.2. Имитационное моделирование автоматизированной системы управления испытательным стендом с помощью MatLab Simulink
-
а. Модель шагового двигателя с постоянным магнитом
Шаговый двигатель с постоянным магнитом (ИМ) обеспечивает дискретное механическое вращательное движение, отличающееся от обычного двигателя постоянного тока, который обеспечивает непрерывное вращение вала при включении. В шаговом двигателе с постоянными магнитами дискретное приращение шага достигается за счет подачи электрических командных импульсов в правильной последовательности. Скорость и направление вращения прямо пропорциональны последовательности и частоте этих импульсов соответственно.
Математическая модель этого двигателя основана на следующих механических и электрических уравнениях.
Электрические уравнения [7], [14]:
ед = —Кт sin NrӨ, ев = -Кт cos NrӨ,
L ^ = Vд(t) — r^ — ед, L = V b (t) — r^ b (t) — ев .
Механические уравнения [7], [14]:
'J di + Вш(€)
< Те аө ч dt
= Те,
= —Кт(гд — ^) sin(NrӨ) + Кт(гв — ^) sin(NrӨ) — Та sin(4NrӨ), = ш, где:
-
+ ед и ев являются противоэлектродвижущими силами (эдс), вызванные в обмотках фазы А и В, соответственно.
-
+ гд и гв являются фазой А и В - извилистые токи.
-
+ гд и гв являются фазой А и В - извилистые напряжения.
-
+ Кт является моторным постоянным крутящим моментом.
-
+ NT является количеством зубов на каждом из двух полюсов ротора.
Параметр Full step size уХ.
2 IN у
-
+ R является сопротивлением обмотки.
-
+ L является извилистой индуктивностью.
-
+ Rт является сопротивлением намагничивания.
-
+ В является вращательным затуханием.
-
+ J является инерцией.
-
+ ш является скоростью ротора.
-
+ Ө является углом ротора.
+Та является амплитудой крутящего момента стопора.
-
+ Те является электрическим крутящим моментом.
Модель шагового двигателя РН265-04В с постоянными магнитами с системой питания и драйверов была разработана с использованием нескольких блоков электроники из библиотеки Simscape [2] (рис. 4).
Контрольный тест положения
Угол вала двигателя по сравнению с сигналом спроса. Алгоритм управления положением принимает команду положения как многие шаги и преобразовывает ее в импульсный train, который управляет драйвером шагового двигателя. Скачки на угловом скоростном графике происходят, когда вал приспосабливается к своему положению, которым управляется.
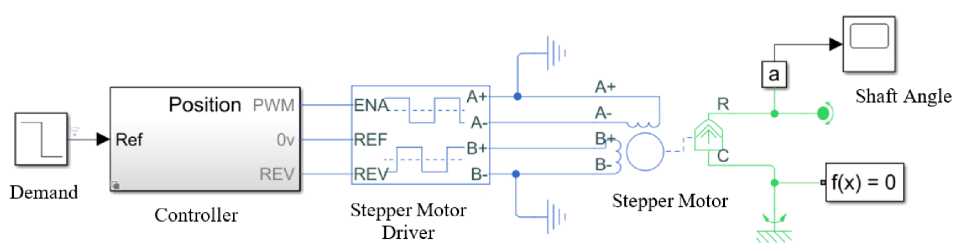
Рис. 4. Имитационная модель Simscape шагового двигателя РН265-04В с постоянными магнитами
Результаты симуляции от Simscape показаны на рис. 5.
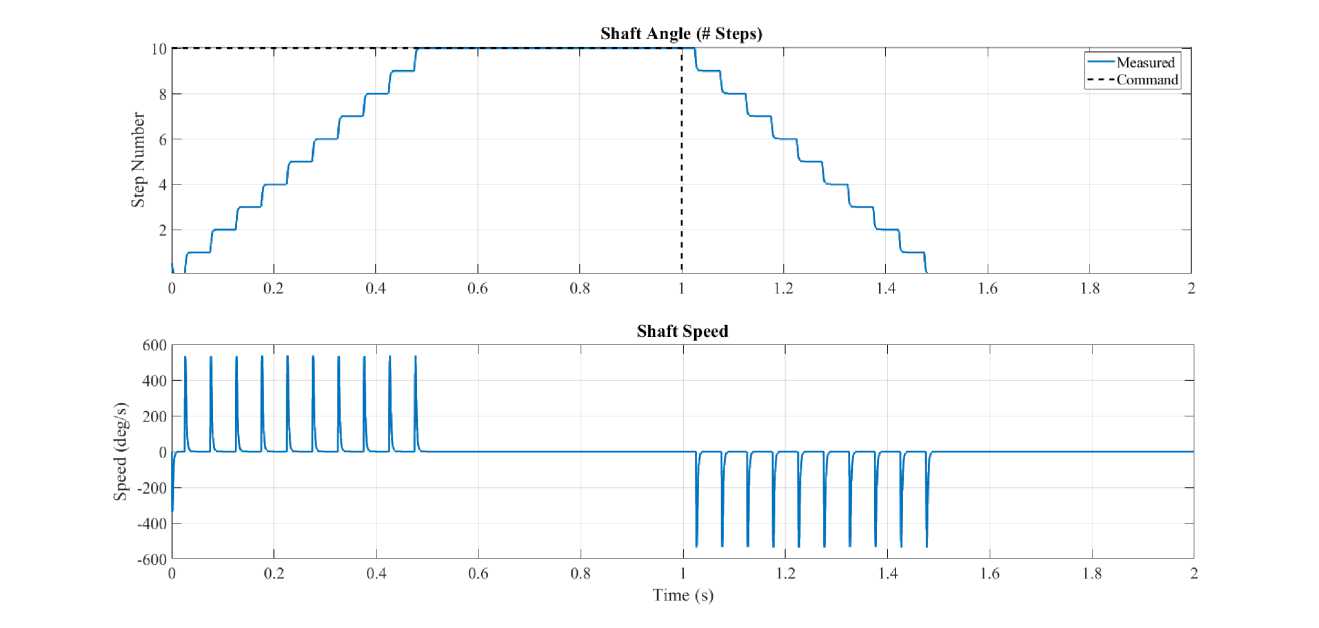
Рис. 5. Результаты симуляции шагового двигателя РН265-04В от Simscape
-
б. Модель механизма ведущего винта
Механизм ведущего винта используется для преобразования вращательного движения, создаваемого двигателями, в поступательное движение. Типичный механизм ведущего винта показан на рис. 6.
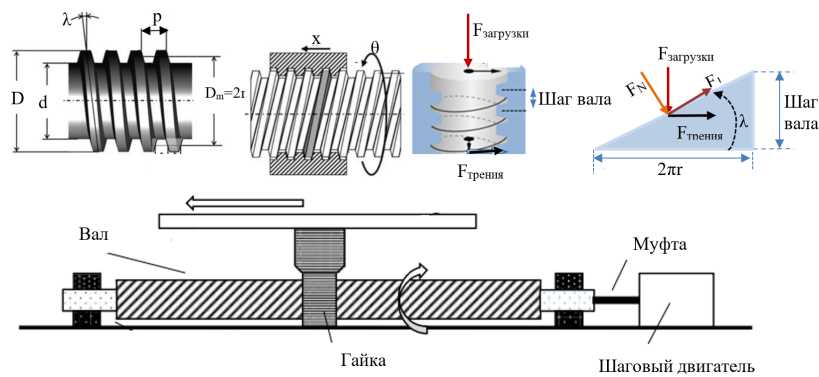
Рис. 6. Типичный механизм ведущего винта
В этой механической системе ведущего винта прикреплен к валу двигателя через зубчатую передачу и муфту вала с соответствующим передаточным числом. Гайка закреплена в корпусе гайки, который совершает поступательное движение, когда винт может вращаться. Кинематика ведущего винта определяется следующими уравнениями [5]:
|
X |
— г tan (А)Ө, |
|
tan А |
— х 7rd , |
|
< 1 |
— пр |
|
d |
D f> D 2, |
|
^d |
— D + 2. |
И уравнением трения [15]:
^трения
— ^загрузки г Х
где: А - угол подъема или угол винтовой линии, d - делительный диаметр, I - длина винта, р - шаг винта, п - количество пусков, Ө - вращение ходового винта, х - перемещение гайки, т - радиус делительной окружности, ц - коэффициент трения и Ттрения - сила трения.
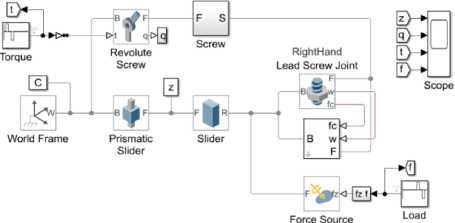
Рис. 7. Типичный механизм ведущего винта
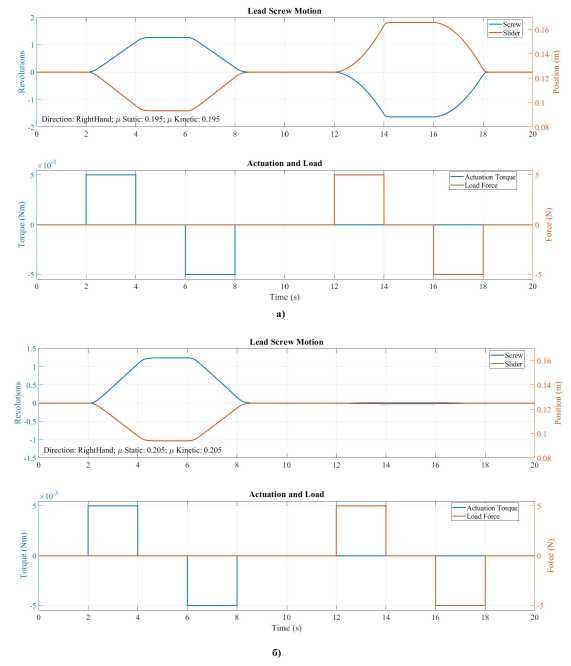
Рис. 8. Результаты симуляции ведущего винта от Simscape
На рис. 7 показана имитационная модель ведущего винта из библиотеки Simscape.
Результаты симуляции ведущего винта от Simscape Logging показаны на рис. 8.
График показывает крутящий момент приведения в действие ведущего винта. В этом тесте коэффициент трения является достаточно низким, поэтому сила загрузки может backdrive ведущий винт (на рис. 8а). Увеличение коэффициента трения выше, чем касательная ведущего угла сделает ведущий винт non-backdriveable (на рис. 86). Прикладывать осевую силу загрузки не будет достаточно для винта, чтобы переместиться.
-
в. Имитационная модель трёхкоординатного испытательного стенда
Рассмотрим структурную и функциональную схемы испытательного стенда с тремя степенями подвижности. Основной механизм стенда состоит из неподвижного звена 0 и трех подвижных звеньев 1, 2 и 3 (на рис. 9).
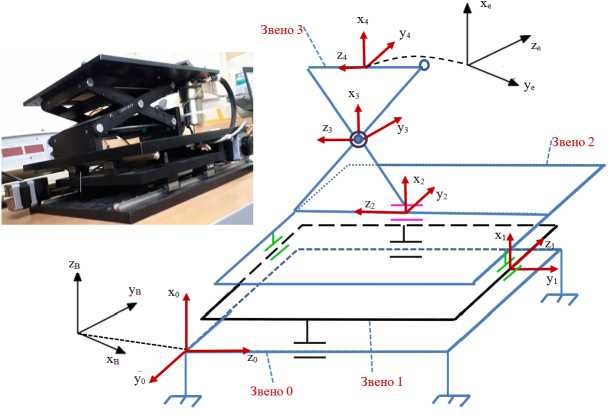
Рис. 9. Координатные системы трёхкоординатного испытательного стенда
Структурная схема механизма этого стенда соответствует системе декартовых координат. В этой системе звено 1 может двигаться поступательно по сравнению с звеном 0, звено 2 перемещается поступательно по сравнению с звеном 1 и звено 3 перемещается по вертикали относительно звена 2. На поверхности звена 3 укреплен стенд, предназначенный для установления объекта при работе эксперимента. Звенья основного механизма образуют между собой три поступательные кинематические пары и могут обеспечить перемещение объекта в пространстве.
На рис. 10 показана блок-схема имитационной модели испытательного стенда. Она состоит из блоков частей испытательного стенда и конфигураций Mechanism Configuration, World Frame, Solver Configuration, Planar Joint, Cylindrical Joint, Revolute Joint и Lead Screw Joint, которые являются обязательными при построении модели любого механизма. Они представляют собой неизменные точки основания (земли), неподвижные в абсолютном (инерциальном) пространстве. Движение отдельных частей механизма задаётся или определяется по отношению к системе координат, реализуемой этими блоками.

Рис. 10. Блок-схема имитационной модели испытательного стенда
-
с. Полная имитационная модель автоматизированной системы управления испытательным стендом
На рис. 11 показана блок-схема имитационной модели автоматизированной системы управления испытательным стендом. Она состоит из блоков моделей привода, который представляет собой систему управления и шаговые двигатели, и испытательный стенд.
Результаты моделирования
Работоспособность модели проверена путем задания одновременного перемещения по заданным координатам, которые показаны на рис. 12. Построение модели исполнительной кинематической цепи испытательного стенда производится в пространстве правильной инерциальной системы координат XYZ.
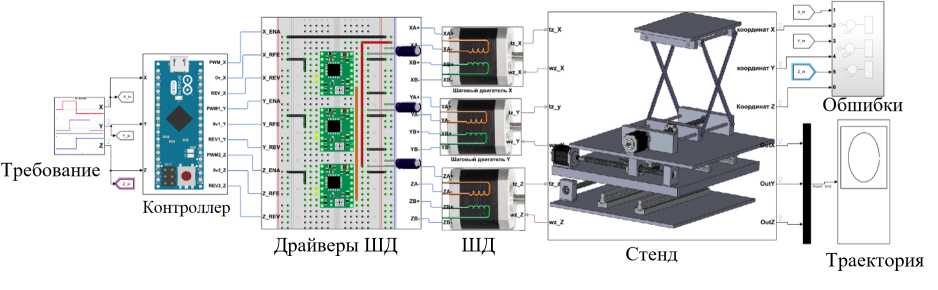
Рис. 11. Блок-схема имитационной модели автоматизированной системы управления стендом
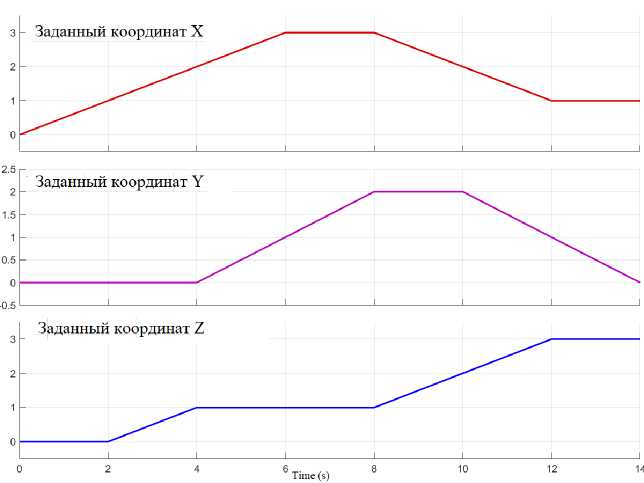
Рис. 12. Заданные координаты
На рис. 13 представлена анимация модели обобщенной исполнительной кинематической цепи испытательного стенда после отработки заданного перемещения.
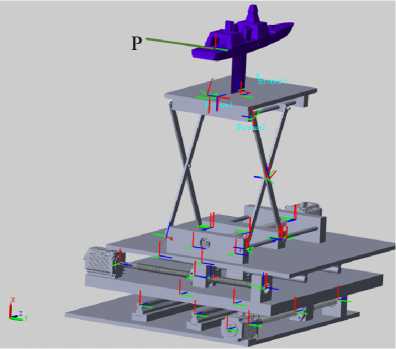
Рис. 13. Анимация модели после отработки заданного перемещения
С помощью датчика траектории движения сформирована программная траектория перемещения точки Р, которая находится на плоскости экспериментального объекта в пространстве (рис. 14).
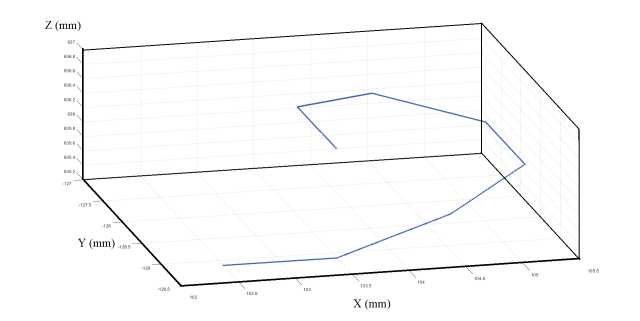
Рис. 14. Траектория перемещения точки Р на пространстве по заданным координатам
При использовании датчика перемещенного очувствления получено, что систематические ошибки программных и заданных координат по каждой оси показаны на рис. 15, от которых по установившемуся значению получены систематические ошибки: ДУ = 0.004 мм, ДУ = 0.001 мм, ДZ = 0.0125 мм.
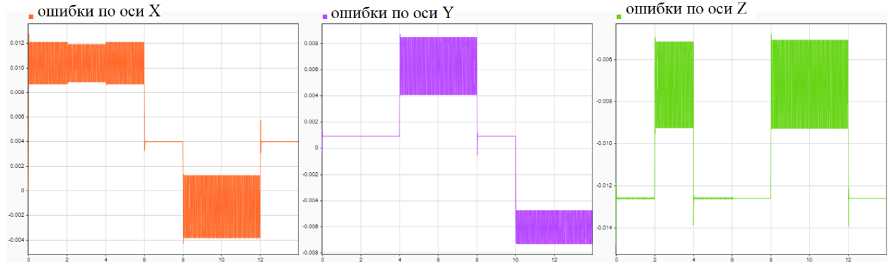
Рис. 15. Систематические ошибки программных и реальных координат
Замечания:
- В среде Simscape дифференциальные уравнения записаны с использованием блоков, то есть механическая система представляется связанной блочной диаграммой. Моделирование механических систем и устройств осуществляется на основе законов кинематики, физики и механики с помощью Simscape. По полученным результатам имитационного моделирования автоматизированной системы управления испытательным стендом выявился характер движения различных частей системы (как в плоскости, так и в пространстве) относительно друг друга в той или иной системе координат. При этом также выявили связи между отдельными объектами и различные их движения в соответствии с теми или иными ограничениями. Анимация модели демонстрировала работу системы в динамике.
- Из рассмотрения результатов моделирования, которые показаны на рис. 14 и 15 следует, что траектория движения точки Р полностью детерминирована к заданным перемещениям и моментам нагрузки. По установившемуся значению систематические ошибки по каждой оси проявляются на реальной траектории движения, однако их значения не превышают 0.004 мм по оси X, 0.001 мм по оси У, 0.0125 мм по оси Z. Для более точных перемещений в аэродинамическом эксперименте операций требуется дополнительная динамическая коррекция, особенно по оси Z.
3.3. Управление CAD-моделью с помощью программ SolidWorks и Lab VIEW
В пункте 3.1 описана модель испытательного стенда, созданная в среде SolidWorks. Следующим шагом в создании модели испытательного стенда была настройка исследования движения, содержащего двигатели, в виртуальной среде. Для этого необходимо включить надстройку SolidWorks Motion. Количество добавленных двигателей зависело от того, какое исследование движения анализировалось. На рис. 16 показано исследование движения испытательного стенда с тремя добавленными линейными двигателями в среде SolidWorks.
LabVIEW работает как мастер, так как LabVIEW имеет общий контроль над системой, получает входные данные и т. д. Выходные данные могут быть получены как из SolidWorks, так и из LabVIEW. Передняя панель и блок-схема Labview показаны на рис. 17 для управления испытательным стендом в виртуальной среде.
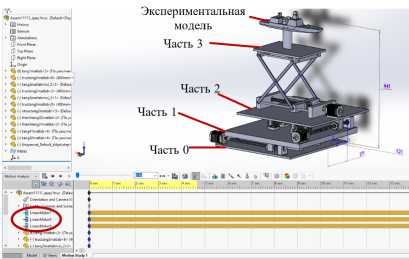
Рис. 16. Испытательный стенд с тремя добавленными линейными двигателями в среде SolidWorks
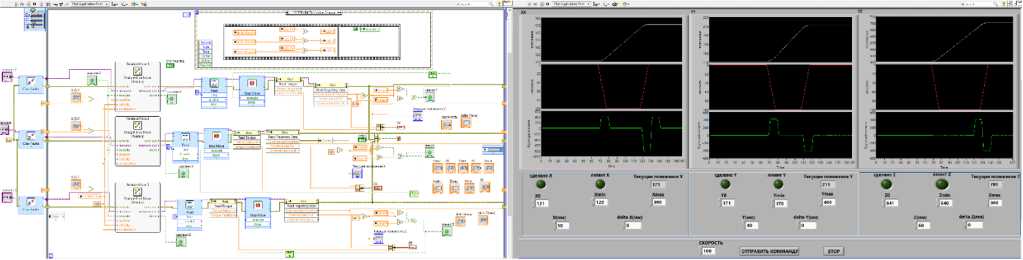
Рис. 17. Блок-схема передняя панель в среде LabVIEW
Оси LabVIEW NISoftMotion, которые также добавляются в менеджер проекта, затем приводят в действие двигатели, определенные в сборке SolidWorks. Соединение SolidWorks и LabVIEW (на рис. 18), используемых для управления испытательным стендом в виртуальной среде, устанавливается модулью SoftMotion от N1 в рамках проекта LabVIEW.
-
□ labview.solidworksjhuyen.lvproj - „. — □ X
Fik Edrt View Project Operate Took Window Help ЛіоЫ X |,^H ^-^ :
Items files
-
B- EQ. Project labview.solidworfcs.thuyen-lvproj 0- 8 My Computer
I Assem! 1111_quay1tfuc|
Рис. 18. Проект LabVIEW
Проект Lab VIEW позволяет импортировать сборки SolidWorks, программу управления моделью стенда в среде Lab VIEW, оси Lab VIEW NISoftMotion, которые приводят в действие двигатели, определенные в сборке SolidWorks.
Результаты моделирования
-
* По оси Ох
Это линейное соединение (1), расположенное между частью (0) и частью (1), и при его перемещении линейным двигателем (1) от начального положения = 121 мм до конечного положения = 221 мм, получены следующие результаты (рис. 19).
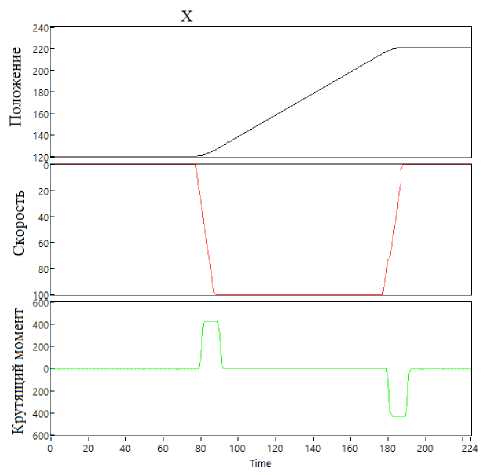
Рис. 19. Результаты для линейного двигателя (1): положение, скорость и крутящий момент
Исходя из этих результатов, можно вычислить максимальную мощность 3.6 Вт, которая необходима для линейного двигателя (1). У реального шагового двигателя по оси Ох испытательного стенда есть максимальная мощность б Вт. Таким образом, этот шаговый двигатель подходит для использования с установленными параметрами.
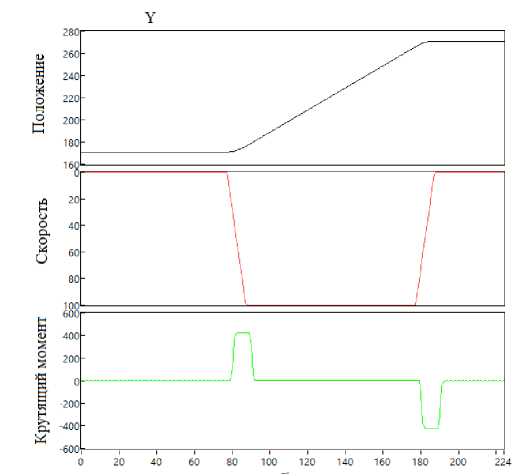
Рис. 20. Результаты для линейного двигателя (2): положение, скорость и крутящий момент
-
* По оси Оу
Это линейное соединение (2), расположенное между частью (1) и частью (2), и при его перемещении линейным двигателем (2) от начального положения = 171 мм до конечного положения = 271 мм, получены следующие результаты (рис. 20).
Исходя из этих результатов, можно вычислить максимальную мощность 3.5 Вт, которая необходима для линейного двигателя (2). У реального шагового двигателя по оси Оу испытательного стенда есть максимальная мощность б Вт. Таким образом, этот шаговый двигатель подходит для использования с установленными параметрами.
* По оси От
4. Создание автоматизированной системы управления испытательным стендом
Это линейное соединение (3), расположенное между частью (2) и частью, которая включает часть (3) и экспериментальную модель, и при его перемещении линейным двигателем (3) от начального положения = 641 мм до конечного положения = 701 мм, получены следующие результаты (рис. 21).
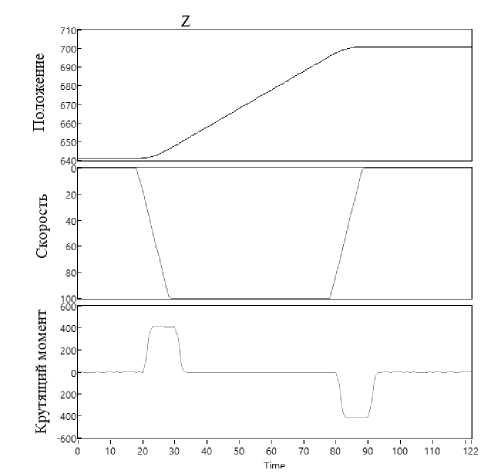
Рис. 21. Результаты для линейного двигателя (3): положение, скорость и крутящий момент
Исходя из этих результатов, можно вычислить максимальную мощность 3.4 Вт, которая необходима для линейного двигателя (3). У реального шагового двигателя по оси От испытательного стенда есть максимальная мощность 5 Вт. Таким образом, это шаговый двигатель подходит для использования с установленными параметрами.
Исходя из результатов в первой и второй частях этой работы, и эффективности комбинации Lab VIEW и Ардуино, автоматическая система управления испытательным стендом создана. Структурная схема этой системы управления показана на рис. 22.
Блок-схема алгоритмов для программы управления испытательным стендом с помощью Lab VIEW и Ардуино показана на рис. 23.
Описание программы для автоматизированной системы управления испытательным стендом (рис. 24)
Чтобы точно определить положение испытательного стенда в пространстве по требованиям для экспериментов в аэродинамической трубе, необходимо установить начальное положение испытательного стенда переключателем, который находится в положении «Сброс».
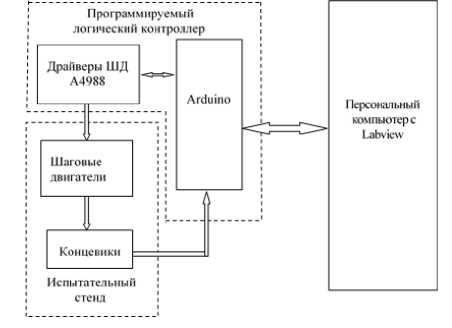
Рис. 22. Структурная схема, системы управления стендом
Когда, испытательный стенд вернётся в начальное положение, то светится индикатор «Сброс», и положение испытательного стенда, будет определено как положение, имеющее координаты ж = 0, у = 0, г = 0. Переключитесь в положение «Работа». Система может работать в двух режимах: ручном и автоматическом.
* Ручной режим
-
- Переключите «Режим» в положение «Ручной».
-
- Настройка, скорости перемещения в ручном режиме.
-
- При введении координат в окно 2 элементами ввода, численных данных Num Ctrl X, Y, Хи нажатии «Send Command», рабочий орган начнет перемещаться в заданную точку со скоростью, указанной в п. 2.
-
- При введении расстояний в окно 2 элементами ввода, численных данных Num Ctrl deltaX, deltaY, deltaZ и нажатии кнопки «Send Command», рабочий орган начнет перемещаться в заданную точку от текущего точки со скоростью, указанной в п. 2.
Пример: Текущая точка: X = 100, Y = 90, Z = 60; deltaX = 5 мм, deltaY = 2 мм, delta Z = 1 мм. После перемещепия новая точка: X = 105, Y = 92, Z = 61.
* Автоматический режим
-
- Переключите «Режим» в положение «Автоматический».
-
- Настройка, скорости перемещения в ручном режиме.
-
- При введении координат в окно 2 файлом, в котором есть координаты по требованиям для эксперимента, и нажатии кнопки «Send Command» рабочий орган начнет по порядку перемещаться в заданные точки со скоростью, указанной в п. 2.
Подготовка к работе и шаги для работы системы
-
- Осмотрите испытательный стенд и убедитесь в надежности крепежных винтов, отсутствии отключенных разъемов, оторванных проводов в монтаже, механических повреждений.
-
- Перед подключением к сети убедитесь, что переключатели интерфейса находятся в начальном положении, клавиша. «Сеть» источника, питания АКИП-Б5-71 находится в положении выключено.
-
- Подключите источник питания АКИП-Б5-71 к внешней сети 220 В, 50 Гц с помощью сетевого шнура.
-
- Подключите электронную плату системы к компьютеру с кабелем и источнику питания и шаговым двигателям в соответствии с полярностями.
-
- Включите клавишу «Сеть». По свечению клавиши и индикатора, наличия напряжения на. источнике питания АКИП-Б5-71 убедитесь, что питание подано. Напряжение источника, питания: 9В.
-
- Переведите переключатель в положение «Сброс». Нажмите на кнопку «Send command». Испытательный стенд вернётся в начальное положение. После того, как индикатор «Сброс» начнет светиться, переведите переключатель в положение «Работа».
-
- Установите координаты, которые определят положение испытательного стенда в пространстве разными способами (ручным или автоматическим) и скорость шаговых двигателей. Нажмите на кнопку «Send command». Испытательный стенд перемещается в правильное положение. Элементы отображения численных данных Num Ind отображают текущее значение положения испытательного стенда.
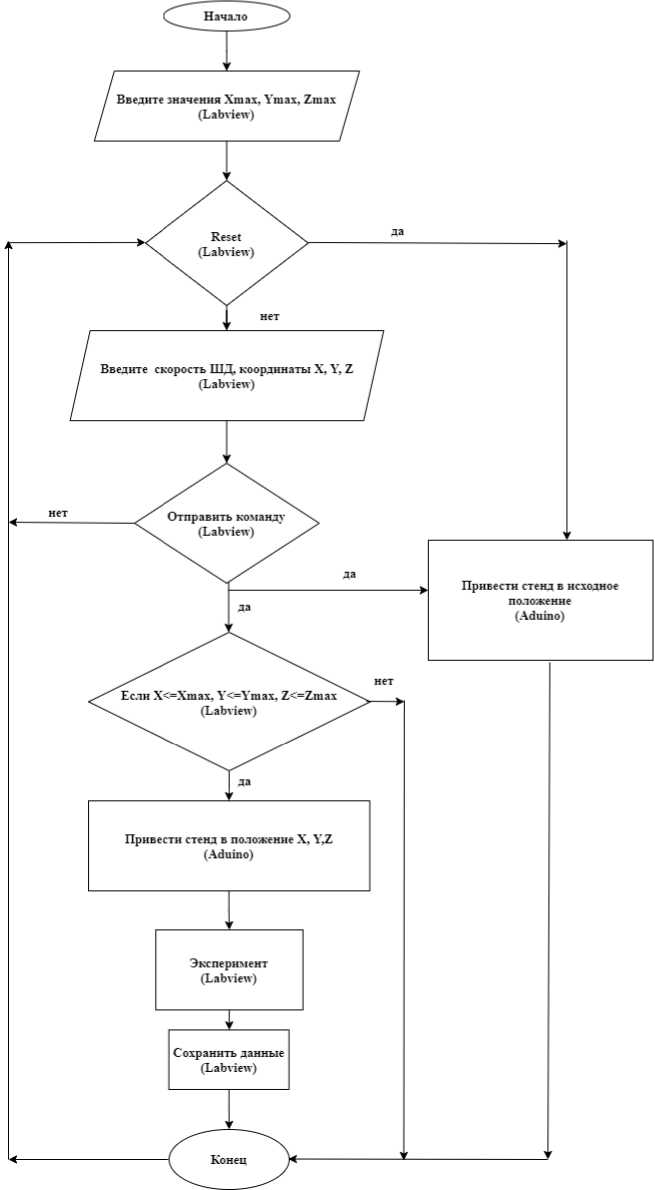
Рис. 23. Блок-схема, алгоритмов для программы управления испытательным стендом
Пример: установите координаты (табл. 1) ручным способом. Реальное перемещение испытательного стенда, по каждой оси показано на. рис. 25.
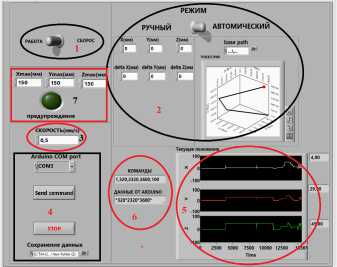
Рис. 24. Передняя панель в среде LabVIEW
Т а б л и ц а 1
Координаты испытательного стенда по каждой оси
|
V (mm) |
Y (mm) |
Z (mm) |
|
0 |
0 |
0 |
|
-50 |
20 |
20 |
|
-70 |
30 |
40 |
|
-30 |
0 |
0 |
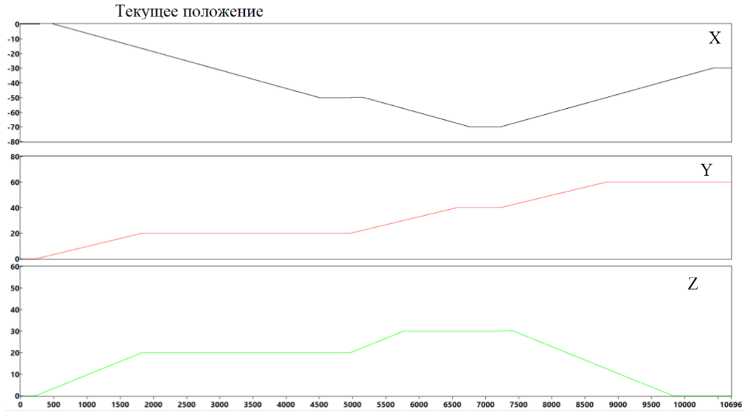
Рис. 25. Реальное перемещение испытательного стенда по каждой оси
- В конце концов переведите переключатели и клавиши в начальное положение, отключите электронную схему устройств и источник питания.
5. Выводы
Выполнена разработка автоматизированного трёхкоординатного испытательного стенда для проведения экспериментов в аэродинамических трубах на основе результатов моделирования. Для исследования и проверки работоспособности стенда проведены исследования режимов его работы методом электронно-механического виртуального моделирования с помощью программ SolidWorks, LabVIEW, MATLAB-Simulink. Результаты моделирования подтвердили работоспособность электронной и механической частей стенда, анимация модели позволяет увидеть работу системы в динамике. Значения ошибок позиционирования не превышают 0.004 мм / 0.001 мм / 0.0125 мм по осям X, Y и Z. Шаговые двигатели имеют мощность, соответствующую требованиям по каждой координатной оси.
Автоматизированная схема позволяет управлять трёхкоординатным испытательным стендом с обеспечением разной скорости. На основе анализа текущего состояния стенда и результатов работы выбраны компоненты системы управления испытательным стендом: плата управления, силовая плата, программа управления. Разработанная автоматизированная система управления испытательным стендом может использоваться для обеспечения эксперимента с перспективой повышения точности позиционирования. Стенд с программой управления может быть включен в курс обучения студентов.
Список литературы Автоматизация трёхкоординатного испытательного стенда
- Смирнов А.А. Изучение принципов работы шагового двигателя и принципа программного управления для систем автоматического управления. 2011. С. 20.
- Борисов И.И., Колюбип С.А. Имитационное моделирование мехатронных систем. Санкт-Петербург : Университет ИТМО. 2020. С. 103.
- My салимое В.М. Моделирование мехатронных систем в среде MATLAB (Simulink/SimMechanics) : учебное пособие для высших учебных заведений. Санкт-Петербург : Университет ИТМО. 2013. С. 114.
- A. Emre Cetin. Handling Interaction Forces Between an Object and Cartesian Robot Arm in Planar Motion. 2002. P. 111.
- Orang Wahid Aragi Vibration caused by friction in lead screw systems. Ontario, Canada : University of Waterloo, Stoletovs, 2009. P. 227.
- Эраки M. T.X. Автоматизированная система управления технологическим манипулятором для розлива и маркировки пищевых продуктов. Тольяттинский государственный университет // Электроснабжение и электротехника. 2018. С. 72.
- Кравченко А.О. https://dspace.tltsu.ru/xmlui/handle/123456789/7854?show=full Модернизация лабораторного стенда с ЧПУ на шаговых двигателях. Московский политехнический университет. 2019. С. 21-25.
- Нгуен Т. Т. Измерительный комплекс аэродинамической трубы малых скоростей АТ-3 Центра по аэромеханике и летательной технике МФТИ // Труды МФТИ. 2020. Т. 12, № 2. С. 161-176.
- Казьмин А.И. Стенд для исследования электрофизических параметров радиопогло-щающих материалов и покрытий применяемых для снижения радиолокационной за-метности авиационных комплексов // Труды МАИ. 2015. Вып. 83. С. 23.
- Ум,нов В.П. Моделирование динамики механизмов и управляемого движения исполнительных устройств манипуляционных роботов. Владим. гос. ун-т им. А.Г. и И.Г. Столетовых, 2019. С. 152.
- Introduction N1 SoftMotion for Solid Works. [Electronic resource] https://knowledge.ni.com/KnowledgeArticleDetails?id=kA03q000000YGZUCA4&l=ru-RU URL: Introduction NI SoftMotion for SolidWorks (ni.com). Date of access: 029/8/2016.
- Help Center. Simscape multibodv link. [Electronic resource] https://www.mathworks.com/help/physmod/smlink/index.html URL: Simscape Multibodv Link Documentation (mathworks.com). Date of access: 03/15/2020.
- Help Center. Mates and joints. [Electronic resource] https://www.mathworks.com/help/physmod/smlink/ref/mates-and-joints.html URL: Mates and Joints - MATLAB Simulink (mathworks.com). Date of access: 03/15/2020.
- Документация. Шаговый двигатель. [Electronic resource] https: //docs. exponenta. ru/physmod/sps/ref/steppermotor. html URL: Шаговый двигатель - MATLAB Simulink (exponenta.ru).
- Документация. Ведущий винт с трением. [Electronic resource] https://docs.exponenta.ru/physmod/sm/ug/lead-screw-with-friction.html URL: Ведущий винт с трением. MATLAB Simulink (exponenta.ru).
