Автоматизированная настройка регуляторов для АСУТП в среде визуального моделирования Simintech

Автор: Устименко В.В., Чубарь А.В., Михайленко Л.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 3 т.21, 2020 года.
Бесплатный доступ
Для успешного протекания технологического процесса требуется постоянное поддержание технологических параметров на требуемом уровне, что обеспечивается применением автоматизированных систем управления технологическими процессами (АСУТП). Классическим решением данной задачи является применение управляющих устройств различного типа, выбор которых напрямую зависит от рассматриваемой системы и предъявляемых к ней требований. Лидирующую позицию среди регуляторов АСУТП последние десятилетия занимает пропорционально-интегрально-дифференцирующий (ПИД) регулятор, эффективность применения которого в технологическом процессе определяется быстродействием и точностью его работы. Данные качества напрямую зависят от правильности настройки параметров регуляторов, для синтеза которых необходимо использование современных систем автоматизированного проектирования. В работе рассматривается метод автоматизированной настройки ПИД-регулятора динамической системы высокого порядка с обратной связью на примере системы автоматического регулирования температуры в помещении. В качестве среды разработки модели системы, а также процесса ее анализа и оптимизации используется современная российская среда динамического моделирования технических систем SimInTech, используемая на ряде предприятий атомной, нефтеперерабатывающей и аэрокосмической отраслей. Приведены основные компоненты системы, передаточные функции ее элементов. Дано поэтапное описание процесса создания проекта из типовых блоков и субмоделей программного обеспечения, взаимодействующих через единую базу данных сигналов с применением встроенного языка программирования. Подробно описано и проиллюстрировано использование встроенного блока оптимизации среды визуального моделирования SimInTech для автоматизированного поиска параметров регулятора ПИД-типа. Перечислены выявленные в ходе реализации проекта преимущества и недостатки данного метода настройки.
Моделирование, пид-регулятор, асутп
Короткий адрес: https://sciup.org/148321982
IDR: 148321982 | УДК: 681.5.013 | DOI: 10.31772/2587-6066-2020-21-3-337-346
Automated setting of regulators for automated process control systems in the Simintech visual modeling system
For successful technological process in automated control systems it is necessary to maintain technological parameters constantly at the required level, which is ensured by the use of automated process control systems (APCS). The classical solution of this problem is the application of control devices of various types, the choice of which directly depends on the system under consideration and the requirements to it. The leading position among the automatic control system regulators for the last decades belongs to the proportional-integral-differentiating (PID) regulator, which efficiency of application in the technological process is defined by the speed and accuracy of its work. These qualities directly depend on the correct setting of the regulator parameters. The synthesis of regulators requires using of modern computer-aided design systems. The article presents the method of automatic setting of PID-regulator of the dynamic system of high order with negative feedback on the example of automatic room temperature control system. The modern Russian environment of dynamic simulation of technical systems SimInTech applied at a number of nuclear, oil refining and aerospace enterprises is used as the environment for system model development, as well as the process of its analysis and optimization. The main components of the system and transfer functions of its elements are presented. The step-by-step description of the process of project construction from standard software blocks and submodels, interacting through a single database with the use of built-in programming language, is described. The use of the built-in block of SimInTech visual simulation environment optimization for automated search of PID-regulator parameters is described in details and illustrated. The advantages and disadvantages of this adjustment method revealed during the project implementation are listed.
Текст научной статьи Автоматизированная настройка регуляторов для АСУТП в среде визуального моделирования Simintech
Введение. Проектирование систем управления является важной составляющей современных технологических производств. В качестве основы управления технологическими процессами в течение вот уже много времени выступают регуляторы, основная задача которых заключается в поддержании на заданном технологией уровне значения параметра системы для успешного протекания технологического процесса в целом. Выбор типа регулятора разнообразен: от простейших двухпозиционных до самонастраивающихся микропроцессорных регуляторов.
Традиционно в системах управления технологическими процессами применяют пропорционально-интегрально-дифференцирующие (ПИД) регуляторы. ПИД-регулирование является фундаментальным элементом процесса управления непрерывными процессами. Управляющие устройства ПИД-типа получили широкое распространение в области автоматизации ввиду своего долголетия, гибкости, высокой функциональной возможности и надежности. ПИД-регуляторы универсальны в применении, пригодны для решения большинства практических задач, они просты в реализации и обладают низкой стоимостью. Область их применения обширна: от бытовых устройств и приборов до атомной и аэрокосмической промышленности.
Однако, как показывает практика, значительная доля проблем управления связаны с неправильной настройкой ПИД-регуляторов: от правильности настройки коэффициентов регулятора зависит точность и быстродействие системы в целом. Именно по этой причине задача параметрического синтеза управляющих устройств является актуальной задачей.
Задача параметрического синтеза для заданных объектов управления сводится к определению оптимальных параметров регулятора, при которых выполняются предъявляемые условия работы системы, а также требования по качеству и точности управления.
В настоящий момент существует ряд методов, алгоритмов и правил, позволяющих ускорить и упростить задачу настройки регуляторов [1-4]. Данные методы обычно подразделяются на две больших категории: методы, направленные на обеспечение требований к качеству регулирования, либо методы подбора, при котором оператор системы должен как можно точнее соответствовать желаемому оператору [5]. Большое распространение в последнее время приобретают регуляторы, способные вычислить «правильные» параметры, при включении устройства в систему [6]. Некоторые из методов настройки регуляторов были рассмотрены в предыдущих работах [7-9].
В данной работе рассматривается процесс автоматизированного поиска параметров управляющего устройства ПИД-типа, включенного в контур регулирования. В качестве объекта регулирования выступает отапливаемое помещение. Модель системы автоматического регулирования (САР) температуры в помещении реализована в российской среде динамического моделирования технических систем SimInTech .
Алгоритм работы ПИД-регулятора. ПИД-регулятор представляет собой параллельное соединение типовых звеньев П-, И-, Д-регуляторов [10]. Передаточная функция ПИД-регулятора является суммой передаточных функций регуляторов каждого типа:
W u ( P ) = K n + + Т д • p ,
Ти • P
где К П – коэффициент усиления регулятора или коэффициент передачи; Т И – постоянная интегрирования; Т Д – постоянная дифференцирования.
В системах с ПИД-регулятором отсутствует статическая ошибка, они обладают высоким быстродействием. Регуляторы данного типа обеспечивают относительно высокое качество регулирования объектов, обладающих большим переходным запаздыванием (например, теплообменных и массообменных аппаратов), а также в тех случаях, когда нагрузка в объектах регулирования изменяется часто и быстро.
Следует отметить, что при неточном задании коэффициентов настройки управляющего устройства ПИД-типа может иметь худшие показатели, чем двухпозиционный регулятор и даже перейти в режим автоколебаний.
Система автоматического регулирования температуры в помещении. В общем виде система автоматического регулирования температуры в помещении представлена на рис. 1.
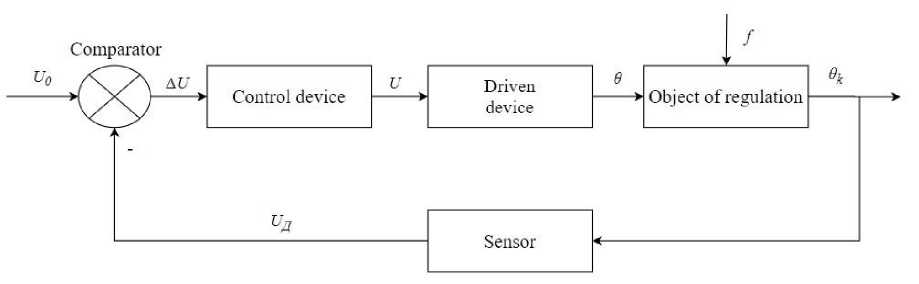
Fig 1. Functional chart of automatic control system of room temperature
Рис. 1. Функциональная схема САР температуры в помещении
Объектом регулирования в рассматриваемой системе выступает отапливаемое помещение. Температура внутри помещения θ является регулируемой величиной; температура воздуха θ k , попадающая из калорифера – регулирующим (управляющим) воздействием; внешние факторы f – возмущающим воздействием.
Воспринимающим органом (чувствительным элементом) в данной системе регулирования является терморезистор RД, включенный в мостовую схему. Терморезистор выполняет также функции сравнивающего органа. Усиление сигнала ∆U (сигнала рассогласования) измерительной мостовой схемы обеспечивается посредством усилителя. Усиленный сигнал UД обеспечивает вращение двухфазного исполнительного двигателя, который изменяет величину перемещения клапана (заслонки) на трубопроводе подачи пара в калорифер, чем достигается изменение температуры воздуха на выходе калорифера – регулирующего воздействия на объект регулирования.
Исходные данные системы представлены следующие передаточные функции:
в [11]. Модель системы управления имеет
W„ ( 5 ) =---1--- р 4005 +1
воздействию;
W ( 5 ) = -0,2 В 400 + 1
– передаточная функция
– передаточная функция
объекта регулирования по регулирующему
объекта регулирования по возмущающему
воздействию;
W ( 5 ) = 0,2 - передаточная функция датчика;
W ( 5 ) = ——передаточная функция магнитного усилителя;
7 0,5 5 + 1
0,002
W ( 5 ) =-- передаточная функция двигателя совместно с клапаном;
Д 5 (0,08 5 + 1)
W ( 5 ) = ——-- передаточная функция калорифера. Л 20 5 + 1
Основные требования, предъявляемые к качеству регулирования САР. Главной задачей регулятора в рассматриваемой системе является поддержание технологического параметра, температуры в помещении, на заданном уровне с минимизацией влияния внешних возмущающих воздействий.
К системе предъявляются следующие требования:
– отработка заданного значения без ошибки в установившемся режиме;
– время переходного процесса – не более 500 секунд
– количество колебаний – не более одного, его амплитуда не должна превышать 5 % от заданного.
Моделирование САР в среде SimInTech и настройка коэффициентов ПИД-регулятора. В качестве среды разработки системы для ее анализа и оптимизации выбрана российская среда моделирования SimInTech [12–14].
Первоначальная комплексная модель динамики, реализованная в данном программном обеспечение, может быть упрощенной, что обеспечивает проверку базовых принципов работы моделируемого объекта и его системы управления. По мере проектирования ее отдельные части могут уточняться и дополняться для максимально подробного соответствия реальному объекту.
Для создания сложной математической модели производится объединение моделей основных подсистем (субмоделей), реализованных в виде отдельных проектов, в единый пакет [15]. Для связи проектов между собой используется база данных сигналов, представляющая собой файловую базу данных, в которой содержатся все необходимые переменные для работы проектов. Данные переменные используются для описания модели, визуального представления процесса моделирования на видеокадрах, обмена данными с внешними модулями и многого другого.
В качестве языка программирования в данном программном обеспечении используется встроенный язык Си, при помощи которого написаны скрипты, производившие по мере расчета манипуляции с объектами схемы.
Схема САР, реализованная в среде визуального моделирования SimInTech представлена на рис. 2. Объект управления для упрощения помещен в субмодель – вложенную схему, состоящую из типовых блоков, состав которой представлен на рис. 3.
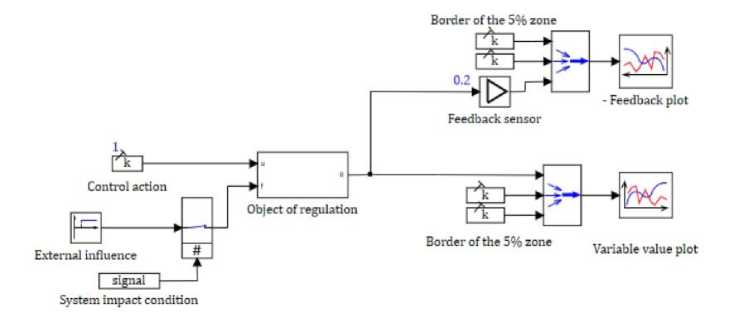
Fig. 2. The automatic control system in the SimInTech environment
Рис. 2. Система автоматического регулирования, введенная в схемное окно SimInTech
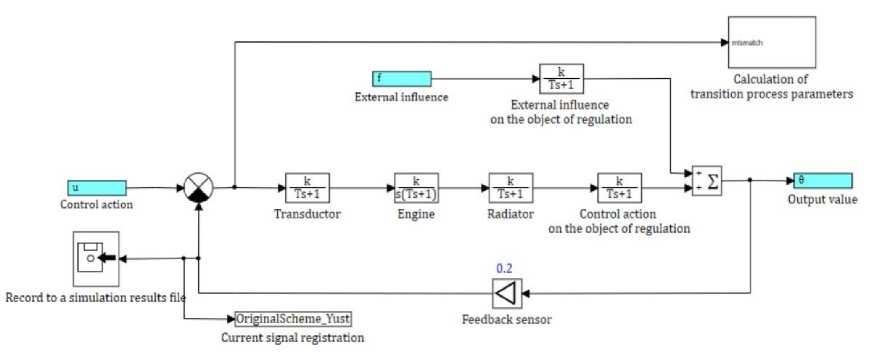
Fig. 3. Composition of the "Control object" substructure
Рис. 3. Состав субструктуры «Объект управления»
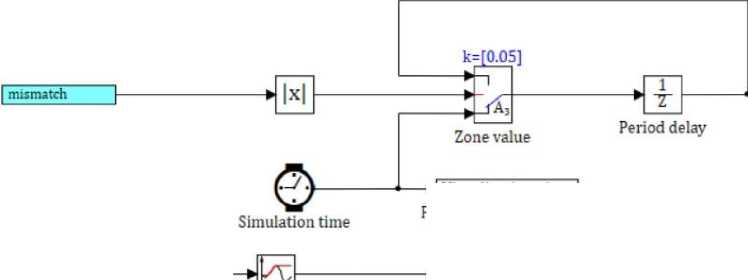
В субмодели «Вычисление параметров переходного процесса», состав которой представлен ан рис. 4, производится автоматический расчет временных показателей качества регулирования: времени регулирования и величины максимального значения управляемой величины. В скрипте, исходя из полученных данных (установившегося значения величины и ее максимального значения) рассчитывается значение перерегулирования.
|OriginalScheme YustJ -
Controlled value max
■* f Visual ization_time | Project time registration
Fig. 4 Composition of the substructure "Calculation of transition process parameters"
> | OriginalSchemeJpp | Regulation time detection
Рис. 4. Состав субструктуры «Вычисление параметров переходного процесса»
Расчет времени регулирования – времени, за которое величина системы достигает нового установившегося значения – заключается в следующем: на средний (логический) входной порт ключа подается модуль сигнала рассогласования (ошибка регулирования). Учитывая, что полное затухание процесса происходит, при t→∞, длительность переходного процесса ограничивают тем моментом времени, когда регулируемая величина начинает отклоняться от установившегося значения менее чем на 5 %. Исходя из этого, если сигнал рассогласования превышает заданную пятипроцентную уставку, то на выход ключа передается текущее модельное время (сигнал с нижнего входного порта). Если управляющий сигнал меньше уставки, то на выход ключа передается тот же сигнал, но задержанный на один шаг интегрирования (сигнал с верхнего входного порта). Таким образом после завершения расчета в переменной «Определение времени регулирования» будет находиться значение времени переходного процесса.
Все переменные, рассчитанные в ходе работы, записываются в базу данных сигналов. Пример базы данных сигналов проекта представлен на рис. 5.
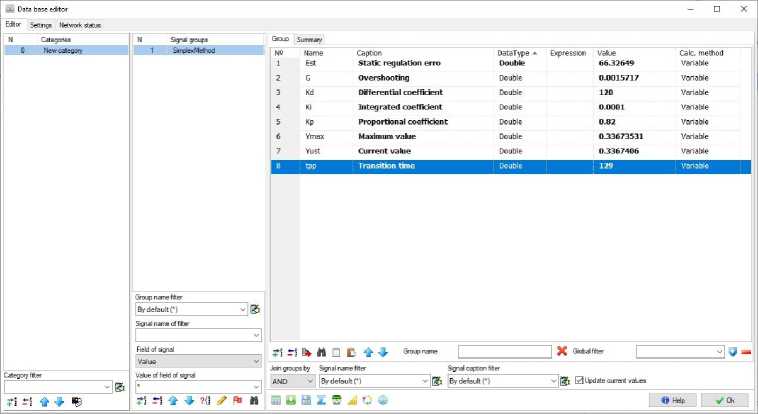
Fig. 5. Design of the Signal Database of the package
Рис. 5. Внешний вид Базы данных сигналов пакета
Более подробно о составе БД данного проекта представлено в табл. 1.
Таблица 1
Перечень сигналов базы данных проекта
|
Имя сигнала |
Описание |
Тип данных |
|
tpp3 |
Время переходого процесса |
Вещественный |
|
Ymax3 |
Максимальное значение управляемой величины |
Вещественный |
|
Yust3 |
Текущее значение управляемой величины |
Вещественный |
|
Est3 |
Статическая ошибка регулирования |
Вещественный |
|
G3 |
Перерегулирование |
Вещественный |
|
K p3 |
Пропорциональный коэффициент регулятора |
Вещественный |
|
K i3 |
Интегральный коэффициент регулятора |
Вещественный |
|
K d3 |
Дифференциальный коэффициент регулятора |
Вещественный |
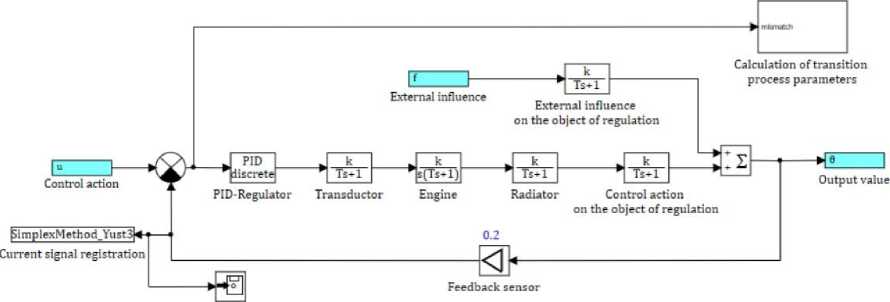
В среде визуального моделирования SimInTech ПИД-регулятор представлен отдельным блоком библиотеки «Дискретные» – «Дискретный ПИД-регулятор». При реализации схемы САР с внедренным ПИД-регулятором, представленной на рис. 6, модификации подвергается лишь макроблок «Объект управления»: регулятор, настройка параметров которого является задачей данной работы, занимает место после сравнивающего устройства.
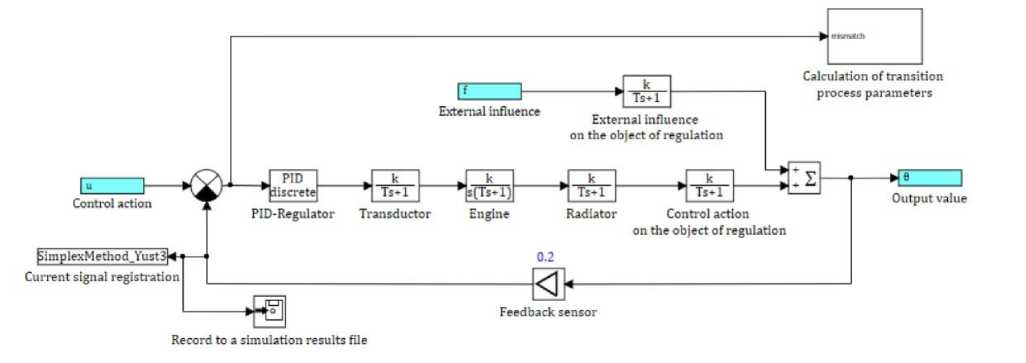
Fig. 6. The automatic control system model with discrete PID regulator
Рис. 6. Модель САР с дискретным ПИД-регулятором
Обращение к блоку регулятора будет происходить через базу данных сигналов: для этого в свойствах блока управляющего устройства напротив каждого из составляющих ПИД-регулятора указывается соответствующая переменная из базы сигналов. Значения коэффициентов регулятора будет меняться автоматически, что позволяет обращаться к данному объекту из любого проекта пакета.
В динамической среде SimInTech создан специальный блок «Оптимизатор», находящийся в библиотеки «Анализ и оптимизация», позволяющий выполнить автоматизированный поиск таких значений варьируемых параметров САР, при которых динамические характеристики САР (и переходной процесс, в частности) удовлетворяют одному или нескольким условиям (критериям) “оптимальности”. Схема системы с блоком оптимизации параметров представлена на рис. 7.
В качестве методов оптимизации, реализация которых возможно в данном блоке, могут быть использованы следующие алгоритмы [13]:
-
1) Поиск – 2: реализуется алгоритм деления шага пополам при одном оптимизируемом параметре ( n = 1) и алгоритм преобразований матрицы направлений при ( n > 1). Далее рассматривается алгоритм многомерного поиска.
-
2) Поиск – 4: реализуется алгоритм квадратичной интерполяции при одном
оптимизируемом параметре ( n = 1) и алгоритм преобразований вращения и растяжения-сжатия ( n > 1).
-
3) Симплекс-метод: используется метод «деформируемого многогранника» Недлера и Мида, в котором минимизируется функция n независимых переменных с использованием ( n + 1) вершин деформируемого многогранника. Каждая вершина может быть
идентифицирована вектором x. Вершина (точка), в которой значение f(x) максимально, проектируется через центр тяжести (центроид) оставшихся вершин. Улучшенные (меньшие) значения целевой функции находятся последовательной заменой точки с максимальным значением f(x) на более “хорошие” точки, пока не будет найден минимум f(x).
Главной задачей применения блока «Оптимизатор» является правильная настройка требуемых данных, в том числе:
-
– имена варьируемых параметров, пределы их изменения и погрешность расчета;
-
– имена локальных критериев и допустимые пределы их значений;
-
– расчетный метод оптимизации и его настройки.
Record to a simulation results file
^impl^Metho d_Kp 3 |SimplexMethod_Ki3 |SimplexMethod Kd3
SimplexMethod_Ymstx3 | SimplexMethod tpp3
Optimizer
Fig. 7. The automatic control system model with optimizer
Рис. 7. Модель САР с оптимизатором
Рассмотрим процесс настройки параметров блока оптимизации более подробно [13].
В качестве параметров оптимизации используются время переходного процесса tpp и максимальное значение Ymax в течении переходного процесса, соответственно оптимизация должна рассчитываться по всему переходному процессу, поэтому в пункте «Режим оптимизации параметров» выберем – «По полному переходному процессу».
При помощи свойств «Максимальные значения выходов блока» и «Минимальные значения выходов блока» ограничим диапазон поиска оптимальных параметров системы. Пропорциональная и интегральная составляющая будут изменяться в диапазоне [0.0001; 5], дифференциальная – в диапазоне [0.0001; 300].
В свойстве «Абсолютная точность подбора значений выходов» укажем точность при расчете оптимизируемых параметров.
Свойство «Начальное приращение выходов» задает первый шаг приращения при подборе значений оптимума. Чем больше шаг, тем быстрее меняются подбираемые значения в начале поиска оптимума, но при этом есть шанс что оптимальное значение будет пропущено. Зададим шаг равный «Абсолютной точности подбора значений выходов», что замедляет расчет, но гарантирует поиск с заданной точностью.
Свойства «Минимальные значения входных критериев оптимизации» и «Максимальные значения входных критериев оптимизации» определяют допустимый диапазон критериев оптимизации. По требованиям, предъявленным к системе при постановке задачи на синтез регулятора величина перерегулирования не должна превышать 5% от заданной величины, время переходного процесса при отработке задания не должно превышать 500 с. Таким образом, минимальные значения критериев оптимизации имеют следующий вид: Ymax = 0,95; tpp = 0 с. Максимальные значения критериев оптимизации: Ymax = 1,05; tpp = 500 с.
В качестве метода оптимизации выбран симплекс-метод.
В свойстве «Начальное приближение выходов блока» задаётся вектор начальных значений оптимизируемых параметров. В рассматриваемом случае оптимизируемыми параметрами являются коэффициенты ПИД-регулятора. Внесем в данное свойство приблизительные значения параметров регулятора, рассчитанные по методу Циглера–Никольса [16]. Результат настройки свойств блока «Оптимизатор» представлен на рис. 8.
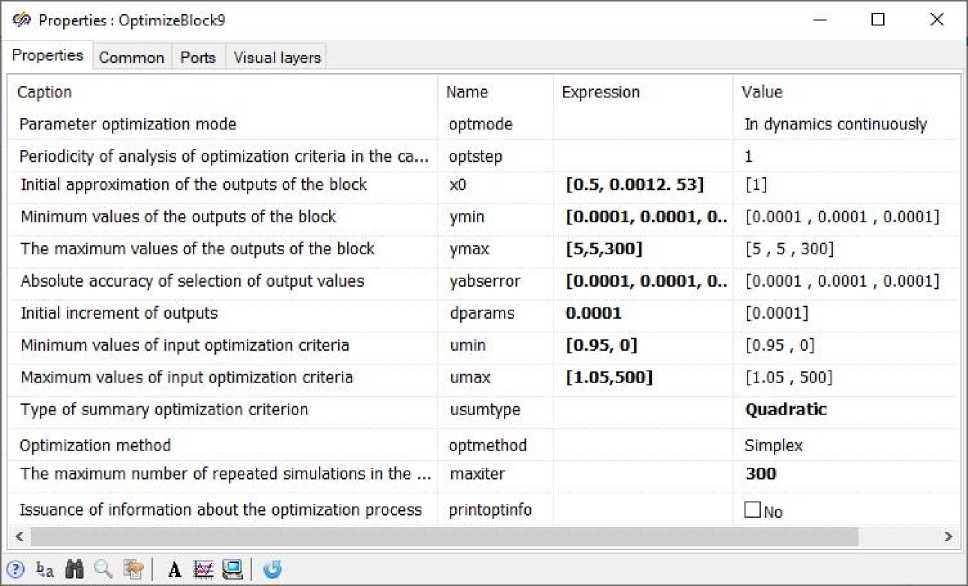
Fig. 8 Properties of the "Optimizer" block
Рис. 8. Свойства блока «Оптимизатор»
В методе Циглера-Никольса процедуру настройки можно свести к следующим этапам:
-
1. Экспериментальное исследование системы: в исследуемую систему с заданным объектом регулирования добавляют пропорциональный регулятор, коэффициент передачи K П которого варьируют до тех пор, пока на выходе системы не установятся колебания с постоянной амплитудой колебаний.
-
2. Фиксирование значений: фиксируется и обозначается через K П * значение коэффициента передачи регулятора, при котором система находится на границе устойчивости и период T * установившихся в системе колебаний.
-
3. Значения параметров ПИД-регулятора регулятора рассчитываются по формулам, приведенным в табл. 2.
Таблица 2
Параметры ПИД-регулятора
|
Тип регулятора |
K П |
K И |
K Д |
|
ПИД-регулятор |
0,60 ⋅ K * |
1,2 ⋅ K П * T * |
0,075 ⋅ K * ⋅ T * |
Данный метод основан на использовании данных, полученных экспериментально на реальном объекте, и использовании запасов устойчивости [15].
Экспериментальные результаты исследования. Экспериментальным путем определен пропорциональный коэффициент KП*= 1,242, при котором в системе устанавливаются колебания с постоянной амплитудой. Из графика определим период колебаний T* = 577 с.
Требуемые параметры ПИД-контроллера, согласно табл. 2, имеют следующие значения:
K П = 0,7450
K И = 0,0025
K Д = 53,755
Внесем данные в свойства блока «Оптимизатор», произведем настройку параметров встроенными средствами среды SimInTech .
Графики переходного процесса системы без применения управляющего устройства и с применение регулятора ПИД-типа, коэффициенты которого были получены из расчетов блока «Оптимизатор» представлены на рис. 9.
Для наглядности сравнения качества переходного процесса сведем в табл. 3 рассчитанные в ходе работы показатели качества регулирования.
Таблица 3
Сравнение показателей качества регулирования
|
Параметр |
Исходная схема |
Схема с ПИД-регулятором |
|
Время регулирования t рег , с |
11 907 |
410 |
|
Максимальное значение Y макс |
1,9 |
1,04 |
|
Второе максимальное значение Y макс2 |
1,8 |
- |
|
Перерегулирование σ, % |
90,7 |
4 |
|
Затухание D |
0,11 |
1 |
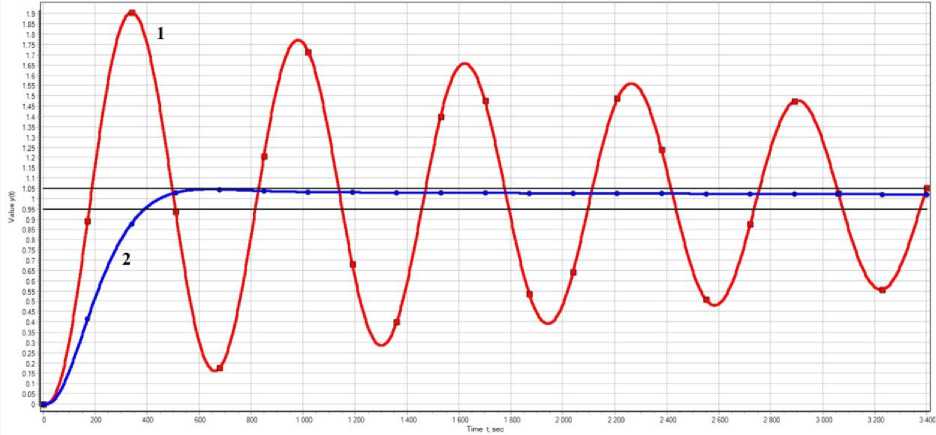
Fig. 9. Comparison of the automatic control system transition diagrams, where 1 is the original circuit, 2 is the circuit with the tuned PID regulator
Рис. 9. Сравнение графиков переходного процесса САР, где 1 – исходная схема, 2 – схема с настроенным ПИД-регулятором
Из графиков переходного процесса САР и показателей качества регулирования, представленных на рис. 9 и табл. 3 соответственно, можно сделать вывод о целесообразности применения управляющих устройств в системах управления технологическими процессами. Автоматизированный поиск параметров регулятора встроенными средствами среды динамического моделирования технических систем SimInTech полностью удовлетворяет предъявляемым к системе требованиям: технологический параметр, в данном случае – температура в помещении, поддерживается на заданном уровне, отработка заданного значения происходит без ошибки в установившемся режиме, время переходного процесса сократилось по сравнению с исходной схемой и составляет менее 500 секунд, колебания отсутствуют. Система устойчива и работоспособна.
Автоматизированная настройка параметров ПИД-регулятора встроенными средствами SimInTech обладает тем преимуществом, что алгоритм будет работать до тех пор, пока не произведет настройку параметров, удовлетворяющую предъявляемым критериям оптимальности или, в случае, если это невозможно, подберет такие коэффициенты регулятора, чтобы качество регулирования системы было как можно ближе к требуемому уровню. Более того, доступно несколько методов оптимизации, что позволяет подобрать наилучший для рассматриваемой системы.
Данный метод не требует непосредственного присутствия оператора, он лишь задает необходимые условия работы блока, однако, процесс настройки может занять большой промежуток времени.
Вместе с тем «Оптимизатор» в среде SimInTech может применяться для настройки параметров управляющих устройств и динамических систем различного типа. Главное – правильно задать критерии оптимальности и начальные приближения выходных переменных.
Заключение. В данной работе в среде динамического моделирования технических систем SimInTech с использованием типовых блоков общетехнических библиотек программного обеспечения разработана и реализована модель объекта автоматизации – динамической системы с обратной связью на примере системы автоматического регулирования температуры в помещении. Описано применение таких средств среды разработки как база данных и язык программирования.
В систему включен пропорционально-интегрально-дифференцирующий регулятор, представляющий собой параллельное соединение П-, И-, Д-регуляторов в виде единого блока «Дискретный ПИД-регулятор».
Произведен автоматизированный поиск параметров ПИД-регулятора встроенными средствами среды разработки – с использованием блока «Оптимизатор», подробное описание применения и настройки которого описано в данной работе. Изложены преимущества и недостатки метода настройки, выявленные в ходе реализации проекта.
Результаты моделирования САР, а также системы с управляющим устройством подтверждены временными графиками и математическими расчётами. Произведено сравнение показателей качества процесса регулирования системы на основании следующих показателей: время регулирования, максимальное значение регулируемой величины, перерегулирование, затухание.
По результатам моделирования системы произведена оценка целесообразности применения средств SimInTech для определения коэффициентов управляющего устройства ПИД-типа. Сделаны выводы об эффективности применения данного способа: система удовлетворяет предъявляемым к ней требованиям в полном объеме. Возможно применение блока оптимизации параметров модели SimInTech для динамических систем различного порядка и управляющих устройств отличного состава от рассматриваемого.
Список литературы Автоматизированная настройка регуляторов для АСУТП в среде визуального моделирования Simintech
- Denisenko V. [PID Regulators: construction and modification principles. Part 1]. Sovremennye tekhnologii avtomatizatsii. 2006, No. 4, P. 66-74 (In Russ.).
- Denisenko V. [PID Regulators: construction and modification principles. Part 2]. Sovremennye tekhnologii avtomatizatsii. 2007, No. 1, P. 78-88 (In Russ.).
- Denisenko V. [PID Regulators: implementation issues. Part 1]. Sovremennye tekhnologii avtomatizatsii. 2007, No. 4, P. 86-97 (In Russ.).
- Denisenko V. [PID Regulators: implementation issues. Part 2]. Sovremennye tekhnologii avtomatizatsii. 2008, No. 1, P. 86-97 (In Russ.).
- Gebel E., Pastukhova E. Teoriya avtomatizatsii tekhnologicheskikh protsessov opasnykh proizvodstv: uchebnoe posobie [The theory of automation of technological processes of dangerous productions: training manual]. 2017, Omskii gosudarstvennyi tekhnicheskii univer-sitet Publ., P. 59-61 (In Russ.).
- Leva A., Cox C., Ruano A. Hands-on PID autotuning: a guide to better utilisation. IFAC Professional Brief. P. 84. Available at: https://www.ifac-control.org/ publications/list-of-professional-briefs/pb_final_ levacox-ruano.pdf/view (accessed 28.08.2020).
- Ustimenko V. V., Chubar A. V., Myznikova V. A. [Fuzzy Regulators Construction in the SimInTech Environment]. Kosmicheskie apparaty i tekhnologii. 2019, No.1(27), P. 22-27 (In Russ.).
- Ustimenko V. V., Chubar A. V., Myznikova V. A. [Using of fuzzy regulators in dynamic systems]. Aktual-nye problemy aviatsii i kosmonavtiki: materialy V Mezhdunarodnoi nauchno-prakticheskoi konferentsii, posvyashchennoi Dnyu kosmonavtiki [Actual problems of aviation and cosmonautics: materials of the V International scientific-practical conference dedicated to the Day of Cosmonautics]. Krasnoyarsk, 2019, Vol. 1, P. 593-594 (In Russ.).
- Ustimenko V. V., Chubar A. V., Rusin D. S. [Application of the genetic algorithm to optimization of a system of controlling of an autonomous object parameters with using an environment of dynamic modelling SimIn-Tech]. Robototekhnika i iskusstvennyi intellekt: materialy XI Vserossiiskoi nauchno-tekhnicheskoi konferentsii s mezhdunarodnym uchastiem [Proceedings of the X Vseross. scientific and technical conference with int. participation "Robotics and artificial intelligence"]. Krasnoyarsk, 2019, P. 261-266 (In Russ.).
- Entsiklopediya ASUTP [Encyclopedia APCS] (In Russ.). Available at: https://www.bookasutp.ru/ Chapter5_1.aspx (accessed 28.08.2020).
- Kartashov B. A., Shabaev E. A., Kozlov O. S. et al. Sreda dinamicheskogo modelirovaniya tekhnicheskikh sistem SimInTech: Praktikum po modeli-rovaniyu sistem avtomaticheskogo regulirovaniya: uchebnoe posobie [He environment of dynamic simulation of technical systems SimInTech: Workshop on modeling systems of automatic regulation: a training manual]. Moscow, DMK Press Publ., 2017, P. 241-243.
- Spravochnaya sistema SimInTech [SimInTech help system] (In Russ.). Available at: http ://help .simintech.ru/ #o_simintech/o_simintech.html (accessed 28.08.2020).
- Khabarov S., Shilkina M. Osnovy modelirovaniya tekhnicheskikh sistem. Sreda SimInTech: uchebnoe poso-bie [Basics of modeling technical systems. SimInTech Environment: a training manual]. Moscow, Lan Publ., 2019, 120 p.
- Monakhov O. Pakety prikladnykh programm MVTU, MATLAB, SIMINTECH i ikh primenenie v ucheb-nom protsesse na spetsial'nosti "Upravlenie v tekhnicheskikh sistemakh": Uchebno-metodicheskoe po-sobi. [Application packages of MSTU, MATLAB, SIMINTECH and their application in the educational process on the specialty "Management in technical systems": Educational and methodical aids]. Moscow, Ros-siiskii universitet transporta Publ., 2019, 92 p.
- Pozharkova I. N., Chubar A. V., Grishchenko I. A. etc. [Process simulation in SimInTech visual simulation environment]. Sibirskii pozharno-spasatelnyi vestnik. 2018, No. 2, P. 29-37 (In Russ.).
- Vadutov O. Nastroika tipovykh regulyatorov po metodu Tsiglera-Nikol'sa: metodicheskie ukazaniya k vypolneniyu laboratornoi raboty dlya studentov, obucha-yushchikhsya po napravleniyam 210100 "Elektronika i nanoelektronika" i 201000 «Biotekhnicheskie sistemy i tekhnologii» [Setting of typical regulators by the Ziegler-Nicolls method: methodological guidelines for laboratory work for students studying in the areas of 210100 "Electronics and nanoelectronics" and 201000 "Biotechnical systems and technologies"]. Toms, Tomskii politekhnicheskii universitet Publ., 2014, P. 5-7.
