Автоматизированная система определения координаты поезда с самонастройкой решающей функции

Автор: Тарасов Евгений Михайлович, Тарасова Анна Евгеньевна
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Электротехнологии и электрооборудование
Статья в выпуске: 3, 2022 года.
Бесплатный доступ
Введение. Проблема определения координат поезда на участке приближения к переезду сопряжена с воздействием дестабилизирующих факторов на первичный датчик информации - рельсовую линию с распределенными параметрами. Это приводит к ошибке вычисления координат поезда. Цель исследования - разработка и научное обоснование принципа построения системы вычисления координат поезда с самонастройкой решающей функции в условиях воздействия значительных дестабилизирующих факторов на первичный датчик информации. Материалы и методы. Для решения задачи достоверного определения координат поезда в работе предложен двухфазный принцип формирования решающей функции. На первом этапе с помощью обучающей выборки образов, используя принцип обучения, определяется решающая функция (модель) системы вычисления координат поезда. При вступлении поезда на участок приближения фиксированной длины определяется рассогласование сравнением вычисленной координаты с фиксированной. Далее наступает второй этап - самонастройка коэффициентов решающей функции до достижения требуемой точности. Результаты исследования. В статье показаны этапы формирования решающей функции двумерными образами, а также разработан и апробирован алгоритм самонастройки решающей функции при воздействии различных дестабилизирующих факторов. С использованием 6 признаков, составляющих векторов тока и напряжения на входе рельсовой линии, получены 6 решающих функций. В качестве аргументов полиномов в них использованы различные сочетания двумерных образов. Обсуждение и заключение. Результаты исследований подтверждают реализуемость формирования решающей функции и ее самонастройки. Максимальная ошибка вычисления координат у различных сочетаний составляет от 9,97 % (199,34 м) до 4,57 % (91,49 м). Ошибка определения с погрешностью не более 5 % у двух решающих функций удовлетворяет требованиям заблаговременного закрытия переезда, так как в 45-секундном интервале времени для приведения в действие автоматической переездной сигнализации расстояние 100 м преодолевается за 3 секунды, то есть затраченное время составляет всего 3 секунды в 45-секундном интервале.
Рельсовая линия, решающая функция, самонастройка, подстройка, информативные признаки, инвариантность, ошибка вычисления
Короткий адрес: https://sciup.org/147238936
IDR: 147238936 | УДК: 656.2 | DOI: 10.15507/2658-4123.032.202203.437-459
Automated train coordinate determination system with self-tuning of the decision function
Introduction. The problem of determining the train coordinates on the approach section to the crossing is associated with the impact of destabilizing factors on the information primary detector - the rail line with distributed parameters. This leads to an error in calculating train coordinates. The aim of the study is to develop and scientifically substantiate the principle of building a system for calculating train coordinates with self-tuning of the decision function under the influence of significant destabilizing factors on the information primary sensor. Materials and Methods. To solve the problem of reliable determination of train coordinates, we propose a two-phase principle for forming the decision function. At the first stage, by means of a training sample of images and using the learning principle, the decision function (model) of the system for calculating train coordinates is determined. When the train enters a fixed-length approach section, the mismatch is determined by comparing the calculated coordinate with the fixed one. The second stage is the self-tuning of the coefficients of the decision function until the required accuracy is achieved. Results. The article shows the stages of forming the decision function by two-dimensional images; there was developed and tested an algorithm for self-turning of the decision function under the influence of various destabilizing factors. Through using 6 attributes of components of current and voltage vectors at the rail line input, 6 solving functions were obtained. Various combinations of two-dimensional images were used as polynomial arguments. Discussion and Conclusion. The study results confirm the feasibility of forming decision function and its self-tuning. The maximum error in calculating coordinates for various combinations ranges from 9.97% (199.34 m) to 4.57% (91.49 m). The error of determination of 5% for two decisive functions satisfies the safety requirements, since in a 45-second time interval to activate an automatic crossing signal, a distance of 100 m is covered in 3 seconds, i.e. the elapsed time is only 3 seconds in a 45 second interval.
Текст научной статьи Автоматизированная система определения координаты поезда с самонастройкой решающей функции
Эффективность технологических процессов регулирования потоков автотранспорта и поездов на железнодорожных переездах зависит от алгоритма и технических средств управления автоматическими системами ограждения переездов и информирования водителей автотранспорта о подходе поездов, а также о ситуации на переезде. Автоматические переездные сигнализации, используемые на железнодорожном транспорте, являются разомкнутыми системами с жестким алгоритмом функционирования. Суть алгоритма заключается в том, что для контроля приближения поезда к переезду и управления ограждающими устройствами организуются участки фиксации вступления поезда на чувствительный элемент датчика приближения к переезду в виде рельсовых линий ограниченной длины. Длина рельсовой линии участков контроля зависит от времени извещения водителей автотранспорта для гарантированного освобождения переезда и максимальной скорости поездов, обращающихся на участке железной дороги, оборудованном переездом. На практике длина рельсовой линии участка контроля достигает 1,5–2,0 км. При фиксированной длине участка контроля l уп фактическое время извещения на переезде обратно пропорционально скорости поезда, приближающегося к переезду, и если скорость поезда низкая, то время извещения значительно превышает оптимальное время закрытого для движения автотранспорта:
t ( v pmax
—
t è
V
ò.ï.
где t р – расчетное время извещения, с; v max – максимальная скорость поездов, обращающихся на участке железной дороги, оборудованном переездом, км/ч; v т.п. – текущая скорость поезда, км/ч; t и – время извещения, с.
В связи с внедрением длинносоставных и тяжеловесных поездов диапазон фактических скоростей существенно расширяется, и количество поездов, следующих с незначительной скоростью, большое. Поэтому простои автотранспорта у закрытых переездов увеличиваются, что приводит к сокращению пропускной способности переездов для автотранспорта. Излишнее время закрытого состояния переезда без дополнительной информации о приближении поезда приводит к повышению риска возникновения ДТП на переезде, так как у водителей автотранспорта возникает сомнение в исправности автоматических ограждающих устройств на переезде, и они начинают движение, объезжая полушлагбаумы или двигаясь через рельсы.
Повысить пропускную способность переездов возможно разработкой алгоритма формирования постоянного времени извещения о закрытии переезда и управления ограждающими устройствами. Для этого необходима информация о фактической координате и скорости приближающегося к переезду поезда.
KTSJ
Определение координаты приближающегося поезда наиболее эффективно осуществлять с использованием принципов распознавания образов предварительно обученными решающими функциями (РФ) и многомерными образами состояний. При этом в качестве информативных признаков, составляющих образы состояний, удобно использовать измеряемые векторы напряжений и токов на питающем конце рельсовой линии, а в качестве решающих функций – ортогональные полиномы Эрмита, Лаггера, Лежандра, Лорана или степенные полиномы Колмогорова – Габора. Предварительно обученные решающие функции с определенными решающими правилами позволяют обеспечить инвариантность решающей функции к воздействию ограниченного диапазона дестабилизирующих факторов. Ошибка определения координат поезда появляется в случае изменения сверхнормативных значений первичных параметров рельсовой линии как линии с распределенными параметрами. Аналогично ошибка появляется в случае изменения значений полного сопротивления устройств согласования входных и выходных электрических параметров рельсовой линии с параметрами источника сигнала опроса рельсовой линии и входным импедансом классификатора. Это приводит к нарушению алгоритма функционирования автоматической переездной сигнализации из-за появления ошибки определения скорости поезда при постоянстве временных интервалов вследствие ошибочного определения разности координат.
Таким образом, системы автоматического управления потоками автотранспорта и поездов относятся к классу сложных систем с множеством
Том 32, № 3. 2022 состояний, функционирующих в условиях неопределенности процесса воздействия дестабилизирующих факторов, показателей качества. Для управления такими системами в настоящее время широко используются адаптивные системы управления с накоплением информации и расчетом некоторого оптимального закона управления (модели) на первой фазе и оперативной корректировки модели в процессе функционирования системы на второй фазе. Первая фаза относится к классу обучающихся систем, а вторая – к классу самонастраивающихся систем. Соответственно, создаваемую систему распознавания координат поезда на участке приближения можно рассматривать как частный случай самонастраивающейся системы с корректировкой модели, в качестве которой предполагается решающая функция.
Цель исследования – разработка и научное обоснование принципа построения системы вычисления координат поезда с самонастройкой решающей функции в условиях воздействия значительных дестабилизирующих факторов на первичный датчик информации.
Обзор литературы
В настоящее время известно много работ, посвященных распознаванию координат поезда на участке приближения к переезду1 [1–3]. В работах предлагаются разные совокупности информативных признаков в образах, а также разные алгоритмы классификации.
Одной из проблем при функционировании системы управления ограждающими устройствами на переездах является большое время ожидания открытия переезда водителями автотранспорта. Это связано, в первую очередь, с несовершенством алгоритма управления переездной сигнализацией и отсутствием информации о координате и скорости поезда. Значительные перерывы времени на пропуск поездов провоцируют нарушения и ДТП на переездах [3; 4].
Повысить эффективность функционирования автоматической переездной сигнализации и сократить ДТП предлагается в других работах с использованием устройства вычисления координаты и скорости поезда на участке приближения [5; 6]. Для этого рельсовая линия рассматривается как линия с равномерно распределенными параметрами, входные и выходные электрические параметры которой зависят от состояния ее первичных параметров и изменяются от воздействия колесных пар поезда. Для разработки математических моделей электрических параметров рельсовых линий их удобно замещать электрической схемой замещения, так как уравнения состояний рельсовых линий достаточно полно описывают взаимосвязь между входными и выходными электрическими параметрами и значениями первичных и вторичных параметров рельсовых линий [7; 8].
Математическим аппаратом, с помощью которого вычисляются координаты приближающегося поезда, являются модели, реализующие принципы распознавания образов с обучающим классификатором состояний2 [1; 9; 10].
При использовании принципов распознавания образов одним из важных процессов является обучение классификатора. Известны два основных подхода при обучении: обучение с учителем и обучение без учителя. Распознавание состояний рельсовых линий предлагает априорное наличие данных об обучаемых образах, поэтому используется обучение с учителем [10–13]. В настоящее время известно множество методов обучения: градиентный метод, метод SVM, GMM, Random Forest, XG Boost и другие, отличающиеся сложностью алгоритмов обучения, информативностью, количеством признаков, временем обучения, точностью классификации образов [14–16]. Фундаментальная цель машинного обучения в данной постановке задач распознавания – определение решающей функции, распознающей i-й образ состояния с заданием определенной точности, а также синтез решающей функции минимальной сложности, отвечающей поставленным требованиям [15; 17–19].
Результатом машинного обучения является формирование решающей функции вычислителя координат поезда [19; 20]. Решающая функция, обученная по выборке, составленной из образов с нормативными первичными параметрами рельсовых линий и параметров согласующих устройств, при изменении номинальных значений начинает вычислять реальную координату поезда с некоторой ошибкой. Для исключения рассогласованности между реальной координатой и вычисленной требуется самонастройка решающей функции (модели системы) адаптивным алгоритмом, то есть появляется задача робастного и адаптивного управления моделью [21]. При управлении самонастройкой модели эффективно применение интеллектуального адаптивного принципа, предполагающего наличие обратной связи [22], но в условиях вычисления координат поезда на протяженных участках обратную связь невозможно организовать, поэтому можно воспользоваться принципами самонастройки на основе глубокой нейронной сети (DMRAC) [23], прямого адаптивного управления3 [24]. Также эффективно решать проблему адаптивной настройки сложных систем с большими неопределенностями параметров возможно многомодельной схемой [25; 26].
Существует большое количество публикаций в области построения распознающих систем, классификаторов, функционирующих в условиях неопределенности, адаптивных систем управления с самонастройкой модели. Однако они часто направлены на решение задач построения систем и устройств с сосредоточенными параметрами, охваченными глубокой обратной связью, позволяющей оптимально управлять процессами распознавания, классификации. Использование множества информативных признаков, предварительного обучения решающей функции и самонастройки (подстройки) коэффициентов полиномов решающей функции, являющихся моделью автоматизированной системы определения координат поезда, позволяет решить задачу достоверного определения координат поезда.
Материалы и методы
В существующих системах управления автоматической переездной сигнализацией в качестве информативного признака, фиксирующего вступление поезда на участок контроля, используется значение тока опроса датчика состояния рельсовых линий 1 1 и классификатор, подключенный на входе рельсовой линии участка приближения к переезду, реагирующий на вступление поезда и имеющий релейную характеристику:
d (X ) = f [ k (11)], (1)
где d ( X) - решающая функция классификатора; X – одномерный образ состояния; k – поправочный коэффициент; 1 1 - ток опроса датчика состояния рельсовых линий.
В общем случае выражение (1) – релейная функция, классифицирующая состояние рельсовой линии по правилу:
d ( X ) =
1,если I1 > 11ср
0,если Ii < 110ТП,
где I 1ср – ток полного подъема якоря реле, или ток срабатывания; I 1отп – ток, при котором тяговое усилие меньше значения, при котором реле отпускает якорь, то есть ток отпускания якоря реле; [1; 0] – состояния релейного классификатора.
Релейный классификатор при вступлении поезда на участок приближения переходит в обесточенное состояние, и устройства, ограждающие переезд от несанкционированного въезда автотранспорта перед приближающимся поездом на переезд, приводятся в действие. Это означает, что поезд вступил на участок приближения поезда к переезду, и движение автотранспорта следует остановить. Время ожидания автотранспорта в каждый момент представляется зависимостью t ож = / ( v тп, l п) . В свою очередь, v тп = f ( s т), где s т - текущая координата по. е. зда на контрольном участке приближения. Такой алгоритм фиксации и приведения в действие ограждающих устройств является жестким, и, соответственно, время простоя автотранспорта у закрытого переезда в первую очередь зависит от текущих координат и скорости поезда.
Следовательно, если в каждый момент времени достоверно определять текущую координату поезда и вычислять текущую скорость, то можно синтезировать систему управления транспортными потоками на переезде с минимальным временем закрытого состояния для движения автотранспорта, то есть t ож → min . На рисунке 1 представлена структурная схема, поясняющая принцип непрерывного определения координат поезда, представленного одиночным сопротивлением шунтирования рельсов контрольного участка R ш.
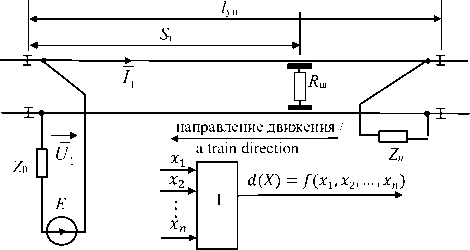
Р и с. 1. Структурная схема первичного датчика информации определения координаты поезда: 1 – решающее устройство вычисления координаты поезда; R ш – сопротивление шунта поезда; х 1 , х 2 , … , х n – информативные признаки, зависящие от координаты поезда;
d ( X ) – решающая функция координаты поезда;
Z 0 , Z n – полные сопротивления ограничителя тока источника и нагрузки рельсовой линии
F i g. 1. Structural diagram of the primary detector for determining the coordinates of the train:
1 – decision device of train coordinates; R ш – train shunt resistance;
х 1 , х 2 , … , х n – informative features depending on to train coordinates;
d ( X ) – decisive function of the train coordinates;
Z 0 , Z n – impedances of the source current limiter and the load on the railway line
При вступлении поезда на участок приближения (координата Z n ) изменяются значения первичных информативных признаков, составляющих образы состояний в каждый момент времени, X, = ( x,, x 2 ,, x 3 ,, ..., xm ), V i = 1,2, _ n , и с использованием заранее обученной решающей функции d ( x ) = f ( X. ) вычисляется координата поезда, используемая при вычислении текущей скорости поезда v тп .
Чувствительным элементом датчика определения координат поезда является рельсовая линия контрольного участка приближения к переезду, представляемая на схеме замещения как линия с равномерно распределенными параметрами, входные электрические параметры которой зависят от координаты поезда; ее дифференциальная схема замещения представлена на рисунке 2.
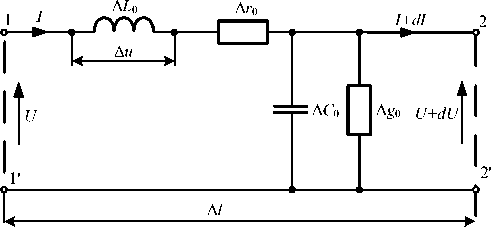
Р и с. 2. Схема отрезка однородной линии с распределенными параметрами:
L 0 , r 0 – продольная индуктивность рельсовой линии и активное сопротивление соответственно;
g 0 , C 0 – поперечная емкость между рельсами и проводимость изоляции
F i g. 2. Scheme of a segment of a homogeneous line with distributed parameters:
L 0 , r 0 – longitudinal inductance of a rail line and active resistance, respectively;
g 0, C 0 – transverse capacitance between the rails and insulation conductivity
Первые два параметра в схемах линий с распределенными параметрами составляют полное продольное сопротивление Z П = r 0 + jωL 0, вторые – полную поперечную проводимость Y П = g 0 + jωC 0. Входные электрические параметры линий с распределенными п араметрам и – векторы напряжений U 1 и токов I 1 – зависят от первичных параметров схемы замещения и воздействий, оказываемых на них. Таким образом, при движении поезда от начала рельсовой линии (2–2’) к (1–1’) (рис. 2) происходит ее постепенное шунтирование колесными парами поезда RH с сопутствующим изменением первичных параметров g 0, L 0, r 0, C 0, что отражается на изменении входных электрических па р аме т ров рельсовой линии – векторов U 1 и I 1 . Да нн ое явление зависимости векторов U 1; 1 1 = f ( S т) позволяет их использовать в качестве первичных информативных признаков, составляющих образы состояний X = ( U 1, φ 1, I 1, ψ 1) и являющихся аргументами полиномов решающей функции d ( X ) = f ( U 1, φ 1, I 1, ψ 1).
Для получения аналитических выражений, связывающих входные электрические параметры рельсовой линии с первичными и вторичными параметрами рельсовой линии, представим дифференциальную схему замещения, представленную на рисунке 2, в виде обобщенной четырехполюсной схемы замещения рисунка 3.
Рассмотрим взаимос в язь векторов напряжений U 1 и токов I 1 с первичными и вторичными параметрами. Система уравнений, связывающих входные, выходные электрические параметры с первичными параметрами рельсового четырехполюсника, имеет вид
<
U 1 = AU 2 + BI 2 ;
\ I 1 = CU 2 + D1 , ;
где
A = ch(//); B = ZBsh(yl);
C = (1/ ZB)sh(Yl); D = A;
/ _ V ( r0 + j ^ L o )( g 0 + j ^ C o ) — 4Z n ^ n ;
Z . = V ( r 0 + j ^ L o )/^ g 0 + j o c o ) = V Z ^T ^ n ;
где γ , Z в – вторичные параметры: коэффициент распространения волны вдоль рельсовой линии и волновое сопротивление; l – длина рельсовой линии, замещаемой четырехполюсной схемой.
В соответствии с (3) векторы напряжений и токов на питающем конце рельсовой линии зависят от длины рельсовой линии l , которая изменяется шунтированием рельсов колесной парой поезда, а также от значений первичных параметров рельсовой линии Z П = r 0 + jωL 0, Y П = g 0 + jωC 0, и, соответственно, могут быть использованы в качестве первичных информативных признаков в образах состояний.
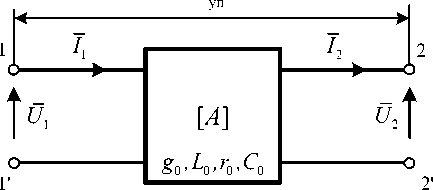
Р и с. 3. Обобщенная четырехполюсная схема замещения рельсовой линии
F i g. 3. Generalized four-pole rail line equivalent circuit
444 Электротехнологии и электрооборудование
На качество распознавания координат поезда оказывают влияние различные возмущения, которые являются дестабилизирующими факторами, воздействующими на рельсовую линию с распределенными параметрами. Они подразделяются на два вида.
Первый вид дестабилизирующего воздействия
Дестабилизирующие воздействия могут иметь физическую природу измеряемых информативных признаков. Впоследствии они суммируются в какой-то координате с полезным сигналом (рис. 4).
Сигналы линий электропередач, пересекающие рельсовые линии не под прямым углом, а мешающие воздействию токов, протекающих по соседним рельсовым линиям, могут быть представлены в качестве реальных дестабилизирующих воздействий, имеющих природу информативного сигнала u(t). Если передаточную функцию по напряжению рельсовой линии в операторной форме записать в виде w(p), информационный сигнал u(p), передаточную функцию помехи, воздействующей на рельсовую линию (РЛ), в виде wf (p), а помеху как fa (p), то уравнение линейной системы, с учетом воздействия помехи fa, имеет вид u2(Р) = WрЛ(p)U](p) + Wf (p) fa, (p), (4) где wРЛ( p), wf ( p) – передаточные функции по напряжению по управляющему воздействию u 1( p) и возмущениям fa (p) соответственно; fa( p) – произвольная аддитивная помеха.
Решением уравнения с целью обеспечения инвариантности I вида воздействия является равенство 0 слагаемой помехи, а именно:
w f ( P X f a ( P ) = 0. (5)
Выполнить равенство (5) возможно введением в схему компаундирующего звена на входе рельсовой линии, способного компенсировать изменения входного сигнала из-за помехи, имеющей природу информативного сигнала4.
Второй вид дестабилизирующего воздействия
Второй вид дестабилизирующих воздействий влияет на выходную величину u 2( t ) через изменение первичных параметров рельсовой линии Z = f ( g 0, L 0, r 0, C о ), где g 0 - проводимость изоляции рельсовой линии, L 0 - удельная индуктивность, C 0 - удельная междурельсовая емкость, r 0 - удельное активное сопротивление рельсовой линии. Такие возмущения являются параметрическими f n ( t ) (рис. 5).
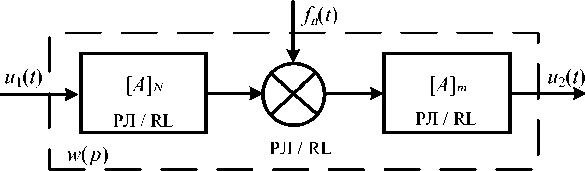
Р и с. 4. Структурная схема координатного воздействия на рельсовые линии сигнала помехи f ( t ): РЛ ‒ рельсовая линия
F i g. 4. Structural scheme of the interference signal coordinate effect on rail linesf(t): RL - Rail line fn (t)
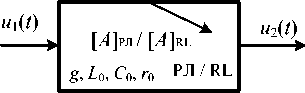
Р и с. 5. Структурная схема параметрического воздействия на сигнал опроса рельсовой линии
F i g. 5. Structural scheme of the coordinate effect on rail lines by the interference signa
Достоверное распознавание координат поезда в условиях изменения первичных параметров рельсовой линии Z = f ( g 0, L 0, r 0, C 0), являющихся параметрическими дестабилизирующими факторами, Z 0, Zn ^ var, сопряжено с весьма сложной реализацией решающей функции, алгоритмов ее обучения, разработки решающего правила классификации координат. В связи с этим неполная математическая формализуемость, высокая степень неопределенности при влиянии возмущающих воздействий формируют задачу построения обучаемой, самонастраивающейся интеллектуальной системы распознавания координат поезда, способной автоматически корректировать решающую функцию при изменении возмущающих воздействий. Для решения составленной задачи необходимо сформировать математические модели датчика информации (рельсовой линии с распределенными параметрами), выбрать вид решающей функции, сложность которой в процессе обучения и самонастройки корректируется, разработать алгоритм обучения и самонастройки полинома решающей функции.
Следует отметить, что правильность и достоверность определения текущих координат поезда sт зависит от количества первичных информативных признаков и их отличительных свойств при распознавании различных координат поезда. Это следует из неограниченного приближающего свойства признаков, которое гласит, что при увеличении количества признаков в образе вероятность достоверного распознавания стремится к единице5.
Наиболее эффективным инструментом для решения задач с размытыми образами вследствие действия дестабилизирующих факторов являются методы теории распознавания многопараметрических образов с решающим устройством, которые обладают внутренней логикой развития, и это позволяет решать задачи усложнения алгоритма распознавания на программном уровне без изменения структуры системы.
Система распознавания состоит из двух основных модулей: датчика и решающего устройства6. Датчик представляет собой устройство, преобразующее характеристики или состояния любой системы в физические измеряемые величины, позволяющие распознавать состояния рельсовых линий. Выходной характеристикой датчика являются информативные признаки, составляющие в i -й момент времени образ (вектор) состояния X = ( U 1 , ф 1 , 1 1 , ^ 1 ) T .
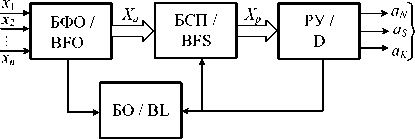
Решающее устройство представляет собой модуль, относящий каждый измеренный в любой момент времени образ к одному из конечных чисел координат путем вычисления значения решающей функции, аргументами которой являются выходные характеристики блока селекции и формирования рабочего словаря признаков (рис. 6).
Применительно к распознаванию координат поезда в качестве датчика удобно использовать рельсовые цепи, так как они по определению являются первичным датчиком информации о состоянии рельсовых линий. Чувствительным элементом первичного датчика (рельсовой цепи) являются рельсовые линии, математически представляемые как линии с распределенными параметрами (рис. 2), нагруженные на входной импеданс системы распознавания.
Одним из важных блоков в обобщенной схеме распознавания является блок обучения. Данный блок по так называемой обучающей выборке образов, когда принадлежность каждого образа к определенной координате известна, позволяет сформировать решающую функцию оптимальной сложности. Помимо этого, процедура обучения, формируемая блоком обучения, позволяет создавать правила выбора (селекции) информативных признаков блока селекции признаков (БСП) [27].
Как отмечено выше, в первой фазе производятся определение вида решающей функции, решающего правила и обучение решающей функции. В качестве примера рассмотрим систему распознавания координат поезда с использованием в качестве решающей функции полного полинома Колмогорова – Габора:
m d (X ) = C0 + У Cixi + i=1
mm mmm
+ ZZ C j X i X j ^ zzz C jk x i x j x k + ...(6) i = 1 j = 1 i = 1 j = 1 k = 1
Если степень полинома равна числу аргументов m , то число членов полного полинома равно W = C 2mm , и при разных m принимает значения 2, 6, 20, 70 и т. д. Например, для двух аргументов U ; и I ; ( m = 2) полином Колмогорова - Габора имеет шесть членов:
d ( X ) = C 0 + C 1 U 1 + C 2 1 1 +
+ C 3 U 1 1 1 + C 4 U 1 + C 5 1 1 .
В качестве решающего правила при вычислении координат поезда удобно использовать остаточную ошибку при вычислении разности между заданной координатой поезда при формировании обучающей выборки образов и координатой, вычисленной обученной решающей функцией:
координаты / coordinates
Р и с. 6. Обобщенная схема системы распознавания координат поезда:
БФО – блок преобразования измеримой информации и формирования вектора априорного алфавита образов X a ; БСП – блок селекции признаков и формирования рабочего словаря признаков X p ; РУ – решающее устройство, вычисляющее координаты поезда;
БО – блок обучения классификатора
F i g. 6. Generalized scheme for recognition and classification of rail lines states:
BFO – block of measurable information transformation and formation of a priori image alphabet vector X a ; BFS – block of features selection and formation of a working glossary of features X p ;
D – decider; BL – classifier learning block
A s = 5 г - d ( X ). (7)
Одним из важных процессов при распознавании координат поезда на рельсовой линии участка приближения к переезду является обучение классификатора. Определение вида решающей функции и решающего правила создает предпосылку для разработки процедуры обучения решающей функции. В настоящее время известно и широко используется множество способов обучения решающей функции: градиентный метод, метод наименьшей среднеквадратичной ошибки, алгоритм перцептрона, метод многомерной аппроксимации. Наиболее простым и удобным способом обучения решающей функции в данном случае является многомерная аппроксимация. Для этого на первом этапе разрабатываются математические модели вектора информативных признаков с использованием уравнений (3) и структурной схемы, представленной на рисунке 1.
Воспользовавшись законами Кирхгофа и Ома, применительно к рисунку 1, получим:
<
и 1 = E - 1 1 Z o ;
^ 1 2 = U 2 / Z n . -
Подставив в (3) выражения (8), получим:
U =____ E ( AZ n + B ) ____= u j (9)
1 ( CZ n + D ) Z o + AZ n + B 1
I =----- E ( CZ n + D ) -----= j, . (10)
1 ( CZ n + D ) Z o + AZ n + B 1
На втором этапе с помощью имитационной модели рельсовой цепи контрольного участка приближения формируется массив образов, где каждому образу соответствует априорно известная координата:
U10I10 ≡ x0 – координата вступления поезда на участок приближения, u111 ^ x ' u212 = x г ,
текущие координаты
поезда,
U l1 уп I l уп ^ x l - координата переезда, где l уп – длина рельсовой линии участка приближения.
По полученным данным составляется система уравнений координаты поезда для значений проводимости изоляции в диапазоне gmin ≤ g < gmax в виде gmin I
g max
n
:0 = ^ Cf ( U 2, 1 2 ) ;
i = 0
n
:1 = ^ C i f ( U 1 ,1 1 ) ;
i = 0
n
:2 = Z C i f ( u 12 , 1 2 ) ;
i = 0
n
= x C i f ( U П , 1 2 ) ;
i = 0
n
: 0 = ^ C i f ( u 0, 1 2 ) ;
i = 0
n
:1 = ^ C i f ( U 1 ,1 1 ) ;
i = 0
n
:2 = z C i f ( U 2 ,1 2 ) ;
i = 0
n xn = 2 Cif (U2,12).
i = 0
И, решая систему, определяются искомые коэффициенты С1...Сn, которые формируют решающую функцию вычисления координаты поезда. Следует отметить, что вместо проводимости изоляции могут быть применены и другие первичные параметры рельсовой цепи, относительно которых необходимо обеспечить инвариантность решающей функции.
Результаты исследования
Применение всего одной координаты возмущающих воздействий для обеспечения инвариантности вызвано тем, что система уравнений (11) переопределенная, то есть число уравнений больше числа неизвестных коэффициентов C 1... C n . Это следует из определения: если количество значений g 0 = 100 (количество систем уравнений по возмущающему фактору проводимости изоляции (11)) в диапазоне от 0,02 до 5 См/км, а количество координат 2 500 (количество уравнений в каждой системе (11)), при длине РЛ l = 2 500 м через 1 м, то общее количество уравнений 250 000, а неизвестных коэффициентов от 6 до 70 при использовании в образе от 2 до 4 признаков. Сформированный ряд решающих функций решением системы уравнений (11) при различных образах имеет вид:
d ( X ) =- 2,754 + 36,637U 1 +
+ 0,472 ^ 1 - 1,209 U 1 ^ 1 -
-
- 55,659 U 2 - 5,775 • 10 - 3 y 1 2 ; (12)
d ( X ) = 1,907 + 0,09 ф 1 + + 0,188 ^ 1 - 4,941 - 10 3 ф 1 ф 1 -- 3,208 - 10 - 3 ф 1 + 2,14 - 10 - 3 ^ 12 ; (13)
d ( X ) =- 13,43 - 0,358 1 1 +
+ 11,12 ^ 1 + 0,14 1 1 Ф 1 -
-
- 2,51612 -1,95•10-3y12;
d ( X ) =- 2,295 + 0,28 ф 1 + + 0,23 1 1 - 0,07 ф 1 1 1 -
-
- 2,639 -10-3 ф12 + 0,31112;
d ( X ) = 3,658 - 10,528 ^ 1 +
+ 0,026 ^ 1 + 0,261 ^ 1 ф 1 +
+4,658^12 -2,786-10-3ф12;
d (X ) =-196,14 + 338,8U1 + +100,8211 - 86,2U111 --146,51U2-12,82111.(17)
В таблице 1 указаны погрешности вычисления координат поезда в начале участка приближения однофазным формированием решающих функций.
Т а б л и ц а 1
T a b l e 1
Таблица погрешности вычисления координат поезда в начале участка приближения однофазным формированием решающих функций
Table of errors in calculating the train coordinates at the beginning of the approach section by single-phase formation of the decision functions
|
Номер формулы / Formula number |
Частота сигнального тока, Гц / Signal current frequency, Hz |
Признаки в уравнении координаты / Features in the coordinate equation |
Погрешность по проверочной выборке / Test sample accuracy |
|
|
в м / in m |
в % / in % |
|||
|
(12) |
50 |
U 1 , у 1 |
259,166 |
12,958 |
|
(13) |
50 |
Ф 1 , у 1 |
225,461 |
11,273 |
|
(14) |
50 |
1 1 , у 1 |
134,637 |
6,732 |
|
(15) |
50 |
ф 1 , 1 1 |
116,581 |
5,829 |
|
(16) |
50 |
U 1 , ф 1 |
128,060 |
6,402 |
|
(17) |
50 |
U 1 , I 1 |
125,368 |
6,268 |
|
Electrical technologies and equipment |
449 |
|||
ETS)
Включение в процесс обеспечения инвариантности по отношению следующего возмущающего воздействия, например r 0 , приведет к увеличению количества уравнений дополнительно на 250 000 в случае, если диапазон изменения данного параметра рельсовой линии так же представлен в пределах 100. Такая система уравнений имеет очень приближенное решение и, соответственно, при определении координат появляется большая погрешность. Решение этой задачи возможно применением принципов адаптивной самонастройки на второй фазе создания автоматизированной системы определения координаты поезда с корректировкой решающей функции системы распознавания.
Самонастраивающаяся система с подстраиваемой решающей функцией в канале управления автоматической переездной сигнализацией, представленная на рисунке 7, состоит из датчика информации Д и канала самонастройки С.
Том 32, № 3. 2022
Канал самонастройки С состоит из решающей функции, являющейся моделью самонастраивающейся системы, блока подстройки коэффициентов решающей функции.
Задача обученной решающей функции, как отмечено выше, состоит в вычислении текущих координат поезда по информации образов состояний. Рассмотрим функциональные связи системы. В установившемся режиме работы системы при номинальных значениях первичных параметров рельсовых линий (в определенном диапазоне) и отсутствии информации о воздействии дестабилизирующих факторов вычисленная координата начала участка приближения d ( X ) и записанная в память длина участка приближения совпадают. Если в силу тех или иных причин первичные параметры РЛ изменяются, варьируются знач ения информативных признаков (U 1 T , I 1 Т ), выходная вычисленная информация о координате
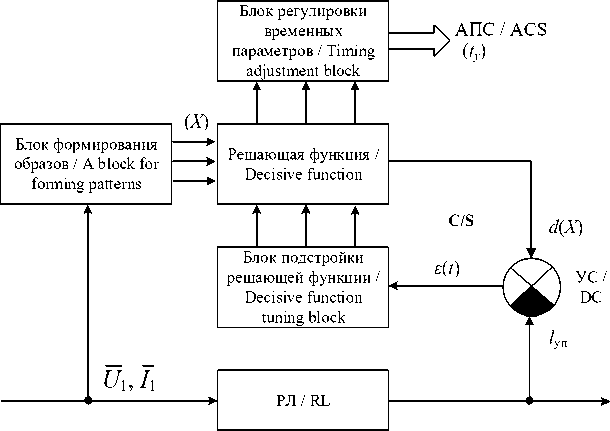
Р и с. 7. Структурная схема самонастраивающейся системы с подстраиваемой решающей функцией: УС – устройство сравнения реальной координаты с вычисленной; РЛ – рельсовая линия; АПС ‒ автоматическая переездная сигнализация; С ‒ самонастройка
F i g. 7. Structural diagram of a self-tuning system with an adjustable decision function: DC – device for comparing the real coordinate with the calculated one;
RL – rail line; ACS ‒ automatic crossing signaling; S ‒ self-tuning channel
начала рельсовой линии изменяется, и на выходе устройства сравнения появляется рассогласование:
A s = 5 т - d ( X ). (18)
Это рассогласование ∆ ε (ошибка определения координат) содержит информацию об изменении параметров РЛ и дестабилизирующих факторах устройств согласования. Используя эту информацию, блок подстройки решающей функции производит корректировку полинома решающей функции таким образом, чтобы устранить возникшее рассогласование (18). Коэффициенты полинома подстраиваются (изменяются) до тех пор, пока рассогласование ∆ ε не станет равным нулю (или допустимому значению А е < е 0). При ∆ ε = 0 значения коэффициентов полинома решающей функции будут новыми, и решающая функция примет новый вид. На этом самонастройка решающей функции завершается.
Алгоритм самонастройки решающей функции в комплексе автоматической переездной сигнализации реализован в виде следующих шагов (рис. 8). Шаг 1. Ввод обученной решающей функции, сформированной в подпрограммах OBUCH и TEST .
Шаг 2. Ввод начального значения счетчика итераций k .
Шаг 3. Организация цикла по значению i , имеющему границу изменений n по количеству коэффициентов, то есть C 0 ÷ C n .
Шаг 4. Текущему значению i -го коэффициента Ci присваивается значение Cinorm , используемое в заданной решающей функции (шаг 1).
Шаги 5, 6. Задаются значения шага изменения текущего коэффициента Ci .
Шаги 7, 8. Определяются новые значения i- го коэффициента РФ C i (+) и C i ( _ ) при положительном и отрицательном приращении. Они вычислены с помощью приращения текущего значения Ci на шаг ∆ Ci .
Шаги 9, 10. С помощью решающей функции с измененным коэффициентом C i (+) или C i ( _ ) решающей функции определяются значения рассогласования ∆ ε (11).
Шаг 11. Значения Ci(+), Ci(_), соответ ствующие им шаги изменения коэффициента ∆Ci и рассогласование Ае(Ci(+)) и Ае (Ci (_)) записываются в i-ю строку матрицы данных Cε.
Шаг 12. Из сформированной матрицы Cε определяется минимальное рассогласование ∆ ε min, соответствующий ему измененный коэффициент решающей функции Ci и шаг изменения коэффициента ∆ Ci .
Шаг 13. Для i-го коэффициента реша ющей функции Cinorm присваивается значение, найденное из шага 12: Cinorm = Ci.
Шаг 14. Вычисляется новое значение коэффициента решающей функции C i+ 1 путем приращения текущего коэффициента wi на шаг ∆ Ci .
Шаг 15. Проверяется условие умень шения рассогласования Ае(Ci(+)) новых коэффициентов по сравнению с текущим Ае(Ci): если «да», то есть Ае(Ci+!) < Ае(Ci), то переход к шагу 16; если «нет», то есть Ае(Ci+1) > Ае(Ci), то переход к шагу 13.
Шаг 16. Производится приращение счетчика итераций k = k + 1.
Шаг 17. Проверяется условие недостижения максимального значения количества итераций: если «да», т.е. текущая итерация k меньше максимального значения количества итераций k max, то осуществляется переход к шагу 3; если «нет», значит, текущая итерация k достигла максимального значения количества итераций k max, и программа заканчивает свое выполнение.
Описанный алгоритм реализован в программно-математическом пакете MATLAB, проведены исследования изменения рассогласования (11) в зависимости от вида решающей функции и сочетания информативных признаков в образах. В алгоритме учитывается постоянный временной интервал, необходимый для закрытия переезда: 40 с при светофорной сигнализации, 50 с при автоматических шлагбаумах, 50 с при оповестительной сигнализации.
Сформирован новый оптимальный ряд решающих функций на основе
– использования четырех первичных признаков,
– предварительно определенных решающих функций (12)–(17), полученных с учетом изменения одного дестабилизирующего фактора,
– обучения решающей функции по (11) на первой фазе,
– применения алгоритма самонастройки на второй фазе, представленного в виде блок-схемы на рисунке 8.
Из полученного ряда решающих функций выбраны 6 (реализованные двумерными образами), которые имеют минимальную погрешность определения координат поезда при использовании тока опроса датчика промышленной частоты 50 Гц:
Том 32, № 3. 2022
d ( X ) - - 2,784 + 36,537U 1 + + 0,492 ^ 1 - 1,209 U 1 ^ 1 - 55,669 U 2 -
-5,775-lO-3^2;
d ( X ) = 1,86 + 0,093 ^ 1 + 0,189 ^ 1 -
-
- 4,941 ■ 10 - 3 ф 1 у 1 - 3,208 ■ 10 - 3 ^ 12 +
+2,141 ■W-3^2;
d ( X ) =- 13,437 - 0,359 1 1 +
-
+ 11,14 ^ 1 + 0,14 1 1\y 1 - 2,516 1 12 -
- - 1,96 •10-3y12;
d ( X ) = - 2,3 + 0,299 ^ 1 +
+ 0,243 1 1 - 0,071 ^ 1 1 1 -
-
- 2,639 -10-3 Ф11 + 0,31911;(22)
d ( X ) = 3,635 - 10,531 ^ 1 +
+ 0,026 ^ 1 + 0,26U 1 ф 1 +
+4,658U2 -2,786-10-3^12;
d ( X ) =- 196,141 + 338,809 ^ 1 + + 100,832 1 1 - 86,204 ^ 1 1 1 -
-
- 146,51^12 -12,821112.
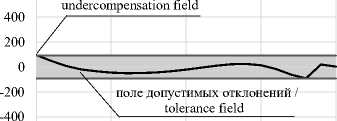
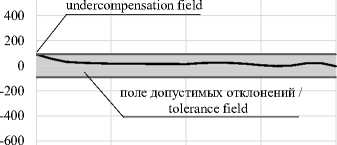
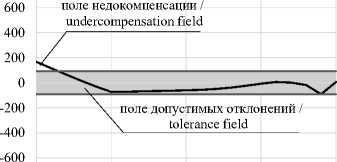
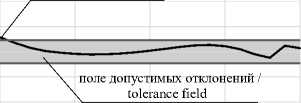
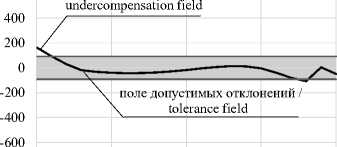
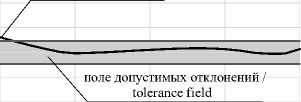
Результаты исследований представлены в виде графиков максимальной ошибки определения координаты поезда предварительно обученными и прошедшими самонастройку решающими функциями (рис. 9).
В таблице 2 указаны погрешности вычисления координат поезда в начале участка приближения двухфазным формированием решающих функций.
Анализ результатов исследований двухфазного формирования решающих функций при различных двумерных образах, представленных на графиках и в таблице результатов исследований, показывает, что в зависимости от сочетаний признаков в образах максимальная ошибка определения
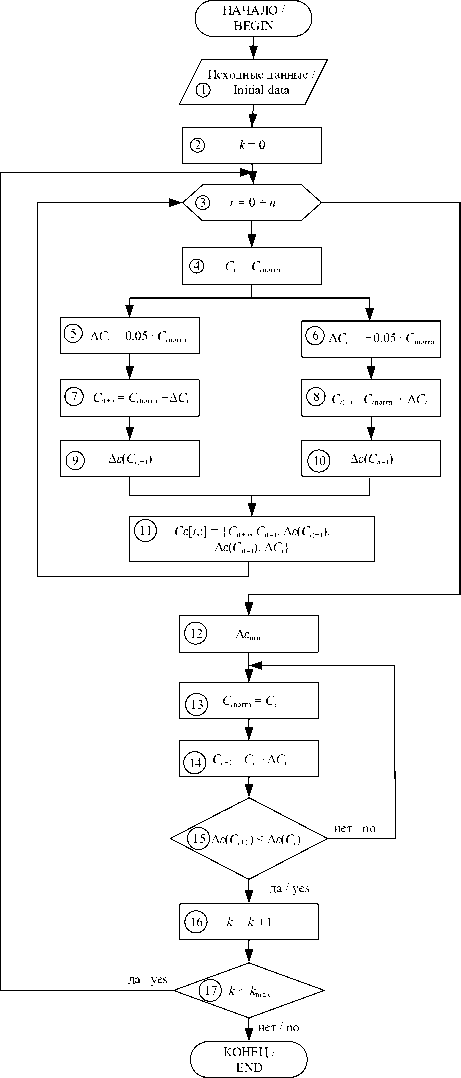
Р и с. 8. Блок-схема алгоритма самонастройки РФ подстройкой коэффициентов полинома РФ
F i g. 8. Flowchart of self-tuning algorithm of a decision function by tuning polynomial coefficients of a decision function
A e , м / A e , m 1000
A e , м / A e , m
поле недокомпенсации /
-600
поле недокомпенсации /
-800
-800
-1000
-1000
1500 2000
l уп, м / l yп, m
1500 2000
l уп, м / l yп, m
a)
b)
A e , м / A e , m 1000
A e , м / A e , m
1000 1----
-800
-400
поле недокомпенсации / undercompensation field
-200
-1000
1500 2000
l уп, м / l yп, m
-600
-800
-1000
1500 2000
l уп, м / l yп, m
с)
d)
A e , м / A e , m
1000 I------
A e , м / A e , m 1000
поле недокомпенсации /
-800
-400
поле недокомпенсации / undercompensation field
-200
-1000
1500 2000
l уп, м / l yп, m
-600
-800
-1000
1500 2000
l уп, м / l yп, m
e)
f)
Р и с. 9. Графики зависимостей: a) d ( X) = f ( U 1 , у 1 ); b) d ( X) = f ( ф 1 , у 1 ); c) d ( X) = f ( 1 1 , у 1 ); d) d ( X) = f ( ф 1 , 1 1 ); e) d ( X) = f ( U 1 , ф 1 ); f) d ( X) = f ( U 1 , 1 1 )
F i g. 9. Dependency graphs: a) d ( X) = f ( U 1 , у 1 ); b) d ( X) = f ( ф 1 , у 1 ); c) d ( X) = f ( 1 1 , у 1 ); d) d ( X) = f ( ф 1 , 1 1 ); e) d ( X) = f ( U 1 , ф 1 ); f) d ( X) = f ( U 1 , 1 1 )
Т а б л и ц а 2
T a b l e 2
Таблица погрешности вычисления координат поезда в начале участка приближения двухфазным формированием решающих функций
A table of error in calculating train coordinates at the beginning of the approach section by two-phase formation of decision functions
до 199,34 м при длине участка приближения 2 000 м, и погрешность составляет от 9,967 до 4,574 %. Мини-
рельсовых линий и номиналов элементов согласующих устройств с источником питания информационного сигнала опроса
мальная погрешность достигается при использовании в образе X = ( U i, I i). Если сравнить результаты, полученные однофазным формированием решающей функции, представленные в таблице 1, то минимальная погрешность составит 5,829 %, или 116,581 м, при сочетании в образе X = ( ф i, I i). Удовлетворительным условием решения задачи формирования решающей функции считается нахождение в пределах зоны максимального допустимого отклонения 5 % (рис. 9e, 9f) графика d ( X ). Необходимо иметь в виду, что результаты однофазного формирования решающей функции получены решением системы уравнений (11) при воздействии всего лишь одного дестабилизирующего воздействия g 0 , а результаты двухфазного формирования решающей функции – при воздействии нескольких дестабилизирующих воздействий и самонастройкой полиномов решающих функций.
Обсуждение и заключение
На основе теоретических исследований были выделены 2 этапа (фазы) формирования решающей функции вычисления координат поезда, инвариантной
датчика и входным импедансом системы распознавания координат поезда.
На первом этапе с помощью обучающей выборки образов формируется предварительная решающая функция, а на втором решающая функция адаптивно самонастраивается (корректируется) при возникновении ошибки вычисления координат поезда. В результате с использованием множества из 6 признаков m = { U i, 1 i, ф i, ¥ [ , U 2 , ф 2} сформированы 6 решающих функций двумерными образами. Они имеют различную погрешность определения координат поезда и поле недокомпенсации ошибки. Диапазон погрешности варьируется от максимального 9,967 % (199,34 м) до минимального 4,574 % (91,489 м) значения. Ошибка определения с погрешностью не более 5 % у двух решающих функций удовлетворяет требованиям заблаговременного закрытия переезда, так как в 45-секундном интервале времени для приведения в действие автоматической переездной сигнализации расстояние 100 м преодолевается за 3 секунды, то есть затраченное время составляет всего 3 секунды в 45-секундном интервале.
Q ИНЖЕНЕРНЫЕ ТЕХНОЛОГИИ И СИСТЕМЫ Том 32, № 3. 2022
Поступила 24.05.2022; одобрена после рецензирования 20.06.2022; принята к публикации 04.07.2022
Об авторах:
Все авторы прочитали и одобрили окончательный вариант рукописи.
Q ИНЖЕНЕРНЫЕ ТЕХНОЛОГИИ И СИСТЕМЫ Том 32, № 3. 2022
Submitted 24.05.2022; approved after reviewing 20.06.2022; accepted for publication 04.07.2022
All authors have read and approved the final manuscript.
Список литературы Автоматизированная система определения координаты поезда с самонастройкой решающей функции
- Machine Learning Methods Based on Probabilistic Decision Tree under the Multi-Valued Preference Environment / W. Zhou [et al.] // Economic Research-Ekonomska Istrazivanja. 2022. Vol. 35, Issue 1. P. 38-59. URL: https://www.tandfonline.com/doi/citedby/10.1080/1331677X.2021.1875866?scroll=top& needAccess=true (дата обращения: 20.05.2022).
- Sarker I. H. Machine Learning: Algorithms, Real-World Applications and Research Directions [Электронный ресурс] // SN Computer Science. 2021. Vol. 2, Issue 160. doi: https://doi.org/10.1007/ s42979-021-00592-x
- Boukerche A., Wang J. Machine Learning-Based Traffic Prediction Models for Intelligent Transportation Systems [Электронный ресурс] // Computer Networks. 2020. Vol. 181, Issue 3. doi: https://doi. org/10.1016/j.comnet.2020.107530
- Security System for Railway Crossings Using Machine Learning / G. Singh [et al.] // 2nd International Conference on Advances in Computing, Communication Control and Networking (ICACCCN) (18-19 December 2020). Noida: IEEE, 2020. P. 135-139. doi: https://doi.org/10.1109/ ICACCCN51052.2020.9362976
- Falahati A., Shafiee E. Improve Safety and Security of Intelligent Railway Transportation System Based on Balise Using Machine Learning Algorithm and Fuzzy System // International Journal of Intelligent Transportation Systems Research. 2022. Vol. 20. P. 117-131. doi: https://doi.org/10.1007/s13177-021-00274-1
- Тарасов Е. М., Тарасова А. Е. Разработка устройства вычисления скорости подвижной единицы на рельсовом пути // Вестник СамГУПС. 2019. № 1. С. 123-130. URL: https://www.elibrary.ru/ item.asp?id=38098897 (дата обращения: 20.05.2022).
- Zheng Z., Dai S., Xie X. Research on Fault Detection for ZPW-2000A Jointless Track Circuit Based on Deep Belief Network Optimized by Improved Particle Swarm Optimization Algorithm // IEEE Access. 2020. Vol. 8. P. 175981-175997. doi: https://doi.org/10.1109/ACCESS.2020.3025628
- Parametric Synthesis of a Track Condition Classifier / E. M. Tarasov [et al.] // Russian Electrical Engineering. 2020. Vol. 91, Issue 3. P. 183-185. doi: https://doi.org/10.3103/S1068371220030189
- Alawad H., Kaewunruen S., An M. Learning from Accidents: Machine Learning for Safety at Railway Stations // IEEE Access. 2020. Vol. 8. P. 633-648. doi: https://doi.org/10.1109/ACCESS.2019.2962072
- Somogyi Z. Machine Learning Algorithms // The Application of Artificial Intelligence ; Ed. by Z. Somogyi. Cham: Springer, 2021. P. 17-86. doi: https://doi.org/10.1007/978-3-030-60032-7_2
- Tou J. T., Gonzalez R. C. Pattern Recognition Principles. London-Amsterdam-Dom Mills, Ontario-Sydney-Tokyo. Addison-Wesley Publishing Company, 1974. 378 p. doi: https://doi.org/10.1002/ zamm.19770570626
- Разработка обучаемого классификатора состояний рельсовых линий с многомерными информативными признаками / Д. В. Железнов [и др.] // Труды СПИИРАН. 2017. № 1. С. 32-54. URL: http://proceedings.spiiras.nw.ru/index.php/sp/article/view/3436 (дата обращения: 20.05.2022).
- Kocbek S., Gabrys B. Automated Machine Learning Techniques in Prognostics of Railway Track Defects // International Conference on Data Mining Workshops (ICDMW) (08-11 November 2019). Beijing: IEEE, 2019. P. 777-784. doi: https://doi.org/10.1109/ICDMW.2019.00115
- Присухина И. В., Борисенко Д. В. Машинная классификация режима работы электрической рельсовой цепи на основе логистической регрессии // Омский научный вестник. 2018. № 6. С. 126-130. doi: https://doi.org/10.25206/1813-8225-2018-162-126-130
- Борисенко Д. В., Присухина И. В., Лунев С. А. Машинная классификация режима работы электрической рельсовой цепи на основе логистической регрессии // Омский научный вестник. 2018. № 4. С. 67-72. doi: https://doi.org/10.25206/1813-8225-2018-160-67-72
- Tan H. Machine Learning Algorithm for Classification [Электронный ресурс] // Journal of Physics: Conference Series. 2021 International Conference on Big Data and Intelligent Algorithms (BDIA 2021) (9-11 July 2021). Vol. 1994. Chongqing, 2022. doi: https://doi.org/10.1088/1742-6596/1994/1/012016
- Supervised Machine Learning: Algorithms andApplications [Электронный ресурс] / Sh. H. Shet-ty [et al.] // Fundamentals and Methods of Machine and Deep Learning ; Ed. by P. Singh. New York: Wiley, 2022. doi: https://doi.org/i0.i002/978iii982i908.chi
- Golden R. Formal Machine Learning Algorithms // Statistical Machine Learning: A Unified Framework ; Ed. by R. Golden. ist ed. New York: Chapman and Hall/CRC, 2020. 524 p. doi: https://doi. org/i0.i20i/978i35i05i507-3
- Ray S. A Quick Review of Machine Learning Algorithms // International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon) (i4-i6 February 20i9). Faridabad: IEEE, 20i9. P. 35-39. doi: https://doi.org/i0.ii09/C0MITCon.20i9.886245i
- Rakcheeva T. Focal Model in the Pattern Recognition Problem // Advances in Artificial Systems for Medicine and Education II. AIMEE20i8 20i8. Advances in Intelligent Systems and Computing ; Ed. by Z. Hu, S. Petoukhov, M. He. Vol. 902. Cham: Springer, 2020. P. i27-i38. doi: https://doi. org/i0.i007/978-3-030-i2082-5_i2
- Leurent E., Efimov D., Maillard O.-A. Robust-Adaptive Control of Linear Systems: beyond Quadratic Costs [Электронный ресурс] // ArXiv. 2020. doi: https://doi.org/i0.48550/arXiv.2002.i08i6
- Zile M. Intelligent and Adaptive Control // Microgrid Architectures, Control and Protection Methods ; Ed. by M. N. Tabatabaei, E. Kabalci, N. Bizon. New York: Springer, 2020. P. 423-446. doi: https:// doi.org/i0.i007/978-3-030-23723-3_i7
- Girish J., Vasvir V., Girish Ch. Asynchronous Deep Model Reference Adaptive Control [Электронный ресурс] // ArXiv. 2020. doi: https://doi.org/i0.48550/arXiv.20ii.02920
- Lopez B. T., Slotine J.-J. E. Universal Adaptive Control of Nonlinear Systems // IEEE Control Systems Letters. 2022. Vol. 6. P. i826-i830. doi: https://doi.org/i0.ii09/LCSYS.202i.3i33359
- Theory and Application of Multi-Model Adaptive Control / Zh. Yuzhen [et al.] // Journal of Engineering Science. 2020. Vol. 42, Issue 2. P. i35-i43. doi: https://doi.org/i0.i3374/j.issn2095-9389.20i9.02.25.006
- Разработка обучаемого классификатора состояний с множеством моделей распознавания образов / Е. М. Тарасов [и др.] // Инженерные технологии и системы. 2020. Т. 30, № 4. С. 659-682. doi: https://doi.org/i0.i5507/2658-4i23.030.202004.659-682
- Тарасов Е. М., Герус В. Л., Тарасова А. Е. Исследование информативности признаков при распознавании состояний рельсовых линий // Вестник Мордовского университета. 20i8. Т. 28, № 2. С. i9i-206. doi: https://doi.org/i0.i5507/0236-29i0.028.20i802.i9i-206
