Автоматизированный агрегат для магнитно-импульсной обработки растений в садоводстве

Автор: Смирнов Игорь Геннадьевич, Хорт Дмитрий Олегович, Филиппов Ростислав Александрович, Кутырв Алексей Игоревич, Артюшин Анатолий Алексеевич
Журнал: Инженерные технологии и системы @vestnik-mrsu
Рубрика: Технологии и средства технического обслуживания в сельском хозяйстве
Статья в выпуске: 4, 2018 года.
Бесплатный доступ
Введение. Современный уровень сельскохозяйственного производства, в том числе садоводства, определяется интеллектуальными машинными технологиями и техническими средствами нового поколения с современным информационным и приборным обеспечением. Для реализации цифровых интеллектуальных агротехнологий в промышленном садоводстве требуется кардинальное изменение парадигмы технического обеспечения, основанное на разработке и применении новых автоматических и беспилотных машин, оборудования и программного обеспечения для управления рабочими процессами машин, навигации технических средств, контроля за выполнением технологических операций, мониторинга урожайности сельскохозяйственных культур, анализа развития болезней и вредителей на растениях и других технологических функций. Материалы и методы. В системе автоматизированного проектирования «КОМПАС-3D» с использованием метода математического моделирования, теоретической механики и оптимального проектирования визуализирована 3D-модель, а также изготовлен опытный образец автоматизированного агрегата для магнитно-импульсной обработки растений. Программный код расчета требуемого перемещения штока актуатора разработан в текстовом редакторе Sublime Text. Использован язык программирования C++. Функциональные возможности программы для электронно-вычислительных машин связаны с возможностями контроллеров STM32, Arduino Mega/Uno/Nano. Для вывода графической информации и взаимодействия с ней использован экран TFT 320x240, Nextion 2.4. Результаты исследования. В результате проведенных лабораторных исследований разработан автоматизированный агрегат и алгоритм системы управления приводом рабочих органов в ходе магнитно-импульсной обработки растений с учетом агротехнологических параметров садовых насаждений. Для управления рабочими органами автоматизированного агрегата разработана компьютерная программа, обеспечивающая управление как в автоматическом режиме, так и дистанционно. Обсуждение и заключение. Созданный агрегат позволяет внедрить новый экологически безопасный технологический прием стимуляции жизненных и ростовых процессов плодовых культур и повысить точность выполнения операции за счет автоматической подстройки к различным агротехнологическим параметрам насаждений, обеспечивая требуемое значение магнитной индукции в рабочей зоне на растительных объектах в полевых условиях.
Магнитно-импульсная обработка, система управления, автоматизированный агрегат, облучение растений, садоводство, низкочастотное магнитное поле
Короткий адрес: https://sciup.org/147220602
IDR: 147220602 | УДК: 631.34:634 | DOI: 10.15507/0236-2910.028.201804.624-642
Automated unit for magnetic-pulse processing of plants in horticulture
Introduction. The current level of agricultural production, including horticulture, is determined by intelligent machine technologies and new generation technical means with mo-dern information and instrument support. The implementation of digital intelligent agricultural technologies in industrial gardening requires a fundamental change in the paradigm of technical support, based on the development and application of new automatic and unmanned machines, equipment and software for managing work processes of machines, navigating technical means, controlling the implementation of technological operations, monitoring the yield of agricultural crops, analyzing diseases and pests on plants and other technological functions. Materials and Methods. 3D model is visualized in the computer-aided design “KOMPAS-3D” through using the methods of mathematical modeling, theoretical mechanics and optimal design. A prototype of an automated unit for magnetic pulse processing of plants is made. The program code for calculating the required movement of the actuator rod is developed in the Sublime Text editor. C++programming language was used. The functionality of the computer program is related to the capabilities of controllers STM32, Arduino Mega/Uno/Nano. Nextion 2.4 (the TFT screen 320x240) for the graphical output and interaction was used. Results. An automated unit with the algorithm of the drive control system of working bodies were developed during the technological operation of magnetic pulse processing of plants, taking into account the agro-technological parameters of garden plantations. A computer program with both automat and remote control was designed for driving the working bodies. Conclusions. The unit allows introducing a new environmentally safe technological method of stimulating vital and growth processes of fruit crops. This device provides the most efficient operation through automatic adjustment to various agro-technological parameters of plantings, providing the required value of magnetic induction in the working area on plant objects in the field.
Текст научной статьи Автоматизированный агрегат для магнитно-импульсной обработки растений в садоводстве
Эффективность цифровых технологий для производства продукции садоводства заключается не только в известных преимуществах автоматизации производства (повышение производи- тельности и интенсивности использования оборудования, исключение ручного труда и т. д.), но и в достижении технологического эффекта путем создания наиболее благоприятных условий для биологических объектов. Как показы-
^
вает анализ научных исследований, с этой целью в настоящее время активно осуществляется поиск эффективных абиотических малоэнергозатратных факторов и экологически безвредных технологий, которые могут повысить устойчивость растений и стимулировать их рост и развитие в полевых условиях.
В настоящее время на обширном экспериментальном материале доказано реагирование биологических объектов на действие искусственного магнитного поля, а также предложены различные способы использования искусственного магнитного поля для повышения урожайности культур [1–3]. По мнению исследователей, наиболее перспективным способом является применение электромагнитного поля, т. к. это предоставляет широкие возможности для изменения частот и позволяет генерировать модулированное по амплитуде и частоте ЭМП с заданной формой сигналов [4–5].
Применение технических средств для выполнения магнитно-импульсной обработки растений в условиях промышленных плантаций позволит продолжить дальнейшие исследования по изучению влияния низкочастотного магнитного поля на растительные объекты в полевых условиях.
Цель исследований – обоснование параметров автоматизированного агрегата и разработка алгоритма работы автоматического поддержания требуемого значения магнитной индукции в рабочей зоне при выполнении МИО растений в садоводстве.
Для обеспечения качественного облучения растений низкочастотным магнитным полем с помощью автоматизированного агрегата необходимо, чтобы в рабочей зоне при его движении со-
Том 28, № 4. 2018
хранялось требуемое значение магнитной индукции.
Обзор литературы
Для воздействия магнитным полем на растения в полевых условиях и выявления эффекта МИО учеными созданы и использованы различные экспериментальные образцы технических средств. Например, механизированная платформа МИО растений разработана ФГБНУ «ВСТИСП», г. Москва (рис. 1).

Р и с. 1. Механизированная платформа для МИО земляники садовой
F i g. 1. Mechanized platform for magnetic pulse processing of strawberry garden
На дополнительной раме велоплатформы в горизонтальной плоскости размещены магнитные индукторы, питание осуществляется от аккумуляторной батареи.
Платформа обладает существенными недостатками, среди которых плохая проходимость, неравномерность хода, невозможность длительной обработки и малая производительность1.
В 2007-2009 гг. на основе активатора магнитно-импульсной обработки растений (АМИ-3) был разработан и изготовлен мобильный агрегат (МА), устанавливаемый на трактор ВТЗ 2048А, с рабочим органом для об- лучения растений земляники садовой (рис. 2).

Р и с. 2. Мобильный агрегат МИО земляники садовой
F i g. 2. Mobile assembly for MPP of garden strawberry
Агрегат включает раму, систему питания и аппарат МИО с двумя плоскими индукторами (с возможностью перемещения в вертикальной плоскости). Применение агрегата на промышленной плантации земляники обеспечило прирост урожайности земляники, выращиваемой промышленным способом, на 30 % за счет стимуляции им- пульсным магнитным полем обменных процессов на определенных фазах развития растений [6].
Анализ зарубежных исследований показал, что существуют отдельные разработки, относящиеся к малоэнергоемким и экологически безопасным технологиям для активизации жизненных процессов растений (рис. 3).
Аграрный робот «Bonirob» различает сорняки и культуры при помощи встроенного алгоритма на базе загруженных изображений. Манипулятор подстраивается под сорняки и срезает их2.
Рассмотренные образцы технических средств для МИО растений обладают рядом значительных недостатков. Они не адаптируются автоматически к высоте растений и междурядьям; предназначены только для обработки низкорастущих культур горизонтально к почве; не имеют возможности изменения угла наклона рабочих органов (магнитных индукторов) для облучения высокорослых растений; обладают малой производительностью; неспособны поддерживать во время работы заданное расстояние между рабочими

Р и с. 3. Платформа Bonirob Amazone (Германия)
F i g. 3. Bonirob Amazone platform (Germany)
и органами и обрабатываемыми культурами, что в конечном итоге влияет на качество проведения технологической операции.
Материалы и методы
С использованием методов математического моделирования, теоретической механики и оптимального проектирования в САПР «КОМПАС-3D» была визуализирована 3D-модель и изготовлен опытный образец автоматизированного агрегата МИО (рис. 4).
В качестве приводов рабочих индукторов агрегата были выбраны электронно-управляемые электроцилиндры, закрепленные на раме3 [7].
Том 28, № 4. 2018
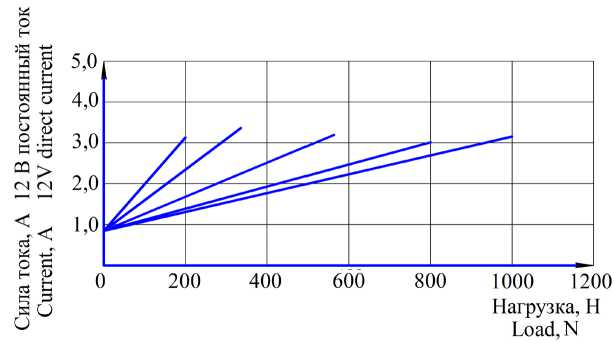
Наиболее важными факторами для оценки и подбора линейных приводов агрегата являются создаваемое усилие, полезная нагрузка и скорость перемещения выходного звена (штока актуатора) (рис. 5).
Анализ диаграмм позволяет установить оптимальные параметры электроцилиндров: мощность - 50 Вт, питание - 12 V, ход штока - 200-600 мм, скорость – 10–45 мм/с, нагрузка – 200– 900 H. С такими параметрами электроцилиндры обеспечивают максимальное изменение ширины захвата агрегата до 3,6 м, подъем-опускание рабочих органов массой 50 Н на 300 мм, изменение
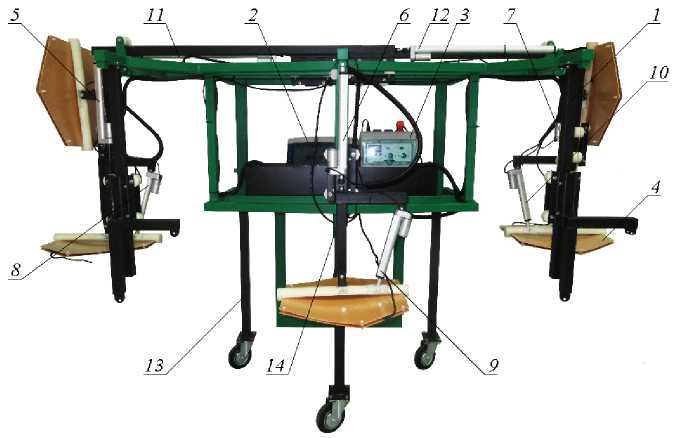
Р и с. 4. Автоматизированный агрегат для МИО растений:
1 – рама; 2 – блок управления; 3 – аппарат МИО; 4 – рабочие органы (магнитные индукторы);
5 – 7 – электроцилиндры поддержания заданного расстояния между индукторами и растениями;
8 - 10 - электроцилиндры изменения угла наклона; 11 - 12 - электроцилиндры изменения ширины захвата; 13 – съемные колеса; 14 – крепления к навеске трактора
F i g. 4. Automated unit for MPP of plants:
1 - frame; 2 - control unit; 3 - MPP apparatus; 4 - working parts (magnetic inductors);
5-7 - electrocylinders for maintaining the given distance between inductors and plants;
8-10 - electrocylinders angle slopes; 11-12 - slat width changing electrocylinders;
13 – removable wheels; 14 – attachments to tractor hitch
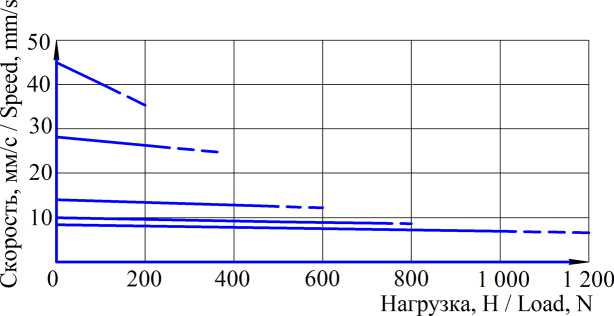
максимальная / maximum номинальная / nominal
a)
b)
Р и с. 5. Экспериментальные параметры линейных приводов: а) зависимость величины тока от нагрузки, b) зависимость скорости возвратно-поступательного перемещения штока актуатора от нагрузки
F i g. 5. Experimental parameters of linear drives:
-
a) dependence of current value on load, b) dependence of reciprocating speed actuator rod on load
угла наклона индукторов в горизонтальной плоскости до 90° 4 .
Исследование и разработка алгоритма работы системы управления положением рабочих органов перемещения штоков актуаторов проведены в лабораторных условиях с использова- нием программно-аппаратных средств (рис. 6).
Программный код расчета требуемого перемещения штока актуатора разработан в текстовом редакторе Sublime Text. Использован язык программирования C++. Функциональные возмож-
-
4 Кутырёв А. И. Расчет привода рабочего органа автоматизированного агрегата магнитно-импульсной обработки садовых растений // Плодоводство и ягодоводство России : сб. науч. раб. 2017. Т 50. С. 184-188. URL: https://elibrary.ru/item.asp ?id=30730810
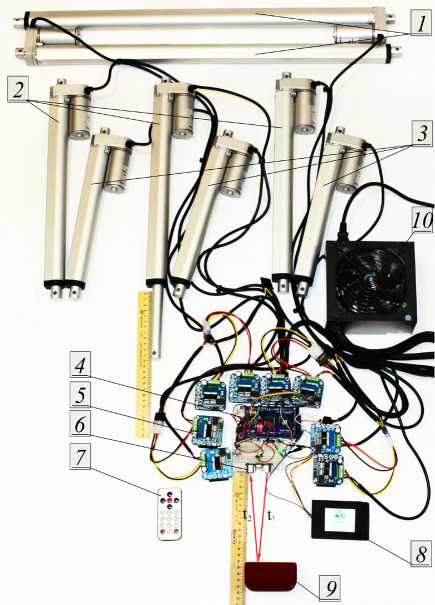
Р и с. 6. Программно-аппаратные средства системы автоматического изменения ширины захвата агрегата, поддержания расстояния и угла между индукторами и растениями:
1 - актуаторы изменения ширины захвата агрегата; 2 - актуаторы поддержания заданного расстояния; 3 - актуаторы изменения угла наклона рабочих органов; 4 - микроконтроллер;
-
5 - драйверы моторов; 6 - бесконтактный ультразвуковой датчик; 7 - инфракрасный пульт ДУ с IR-приемником; 8 – TFT-экран; 9 – препятствие; 10 – блок питания
F i g. 6. Hardware and software system for automatic change of the width unit, maintaining the distance and angle between the inductors and plants:
-
1 – actuators for changing the working width of the unit; 2 – actuators for maintaining the specified distance; 3 - actuators for changing the angle of inclination working elements; 4 - microcontroller;
-
5 - motor drivers; 6 - non-contact ultrasonic sensor, 7 - infrared remote control with IR receiver;
8 – TFT screen; 9 – obstacle; 10 – power supply ности программы для ЭВМ связаны с возможностями контроллеров STM32, Arduino Mega/Uno/Nano. Для вывода графической информации и взаимодействия с ней использован экран TFT 320x240, Nextion 2.4.
Результаты исследования
При выполнении МИО растений навесной агрегат с тяговой машиной (мобильный агрегат) движется по плантации с неровностями, величина которых не превышает требования агрофо- на для обрабатываемой культуры. При наезде МА на неровность положение магнитного индуктора изменяется, что ведет к изменению положения зоны воздействия с необходимыми параметрами для качественного выполнения технологической операции.
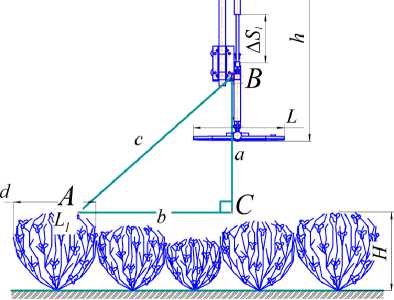
При наезде переднего колеса МА на неровность происходит смещение рабочего органа (магнитного индуктора) вниз. Наиболее сильно свое местоположение изменяет максимально удален- ная от центра поворота точки К задняя часть индуктора – точка D (рис. 7).
Величину смещения точки D можно вычислить по формуле:
t 2 = sin( a ) C 2 D + cos ( a ) t 1 .
Определив t 2 и зная радиус колеса, можно рассчитать уровень расположения индуктора при наезде переднего колеса трактора на неровность, т. е. расстояние от плоскости индуктора до уровня почвы:
13 = R -12, где R – радиус заднего колеса трактора.
В качестве базового был выбран трактор «Беларус-1221». Радиус заднего колеса трактора R = 460 мм; угол, образованный с учетом неровностей агрофона, а = 7°; расстояние от уровня центра заднего колеса до уровня индуктора t1 = 200 мм; значение t2 = 0,12·1467 + 0,75·200 = 282,5 мм. Тогда расстояние t3 = 460 ‒ 282,5 = 177,5 мм. В данном случае значение параметров облучения в зоне обработки значительно изменится и повлияет на рассеивание магнитного поля и, соответственно, на качество выполнения технологической операции.
Для поддержания постоянного значения магнитной индукции в рабочей зоне и качественной обработки растений актуаторы в автоматическом режиме подстраиваются под неровности агрофона и агротехнологические параметры растений с учетом размеров и строения кустов, а также размерных характеристик междурядий и рядков тех или иных сортов.
На примере земляники садовой аг-ротехнологическая модель рассчитана на ширину куста 0,34-0,64 м при средней величине 0,459 м (рис. 8). Высота кустов находится в пределах 0,21–0,45 м при среднем значении 0,325 м5.
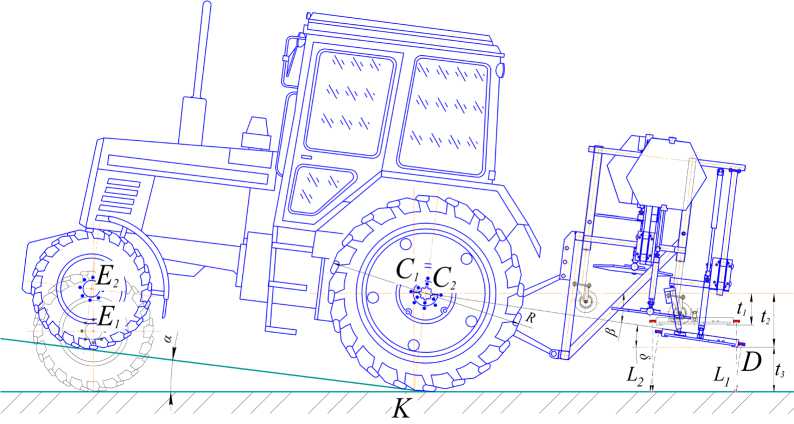
Р и с. 7. Схема изменения уровня расположения магнитного индуктора при наезде переднего колеса мобильного агрегата МИО на неровность
F i g. 7. Scheme of change in level of magnetic inductor when the front wheel mobile unit MPP hits the unevenness
Высота куста, мм Bush height, mm
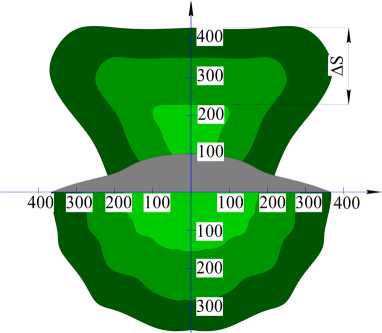
Ширина куста, мм Bush width, mm
Р и с. 8. Агротехнологическая модель куста земляники садовой
F i g. 8. Agro-technological model of a bush of strawberry
распространения звука на время. Звуковая волна проходит расстояние от датчика до объекта и обратно, поэтому при определении расстояния только до объекта результат делится на 2:
L = V • E /2, (1)
где L ‒ расстояние до растения, м; V ‒ скорость звука в воздухе, м/c; E ‒ время ожидания эха, с.
Скорость звука в воздухе - величина непостоянная и зависит от температуры:
V 2 = у R^T , M
где γ ‒ показатель адиабаты воздуха, ед.; R - универсальная газовая постоянная (Дж/моль*К); T - абсолютная температура воздуха, К; M ‒ молекулярная масса воздуха, г/моль.
Подставив в формулу известные значения γ , R , M , получим:
В результате проведенных лабораторных исследований разработана блок-схема, описывающая алгоритм работы приводов рабочих органов навесного агрегата МИО (рис. 9) с ультразвуковыми датчиками при выполнении технологической операции с учетом агротех-нологической модели куста земляники садовой.
Задав требуемое расстояние до объекта облучения, запускаем цикл, включающий в себя определение текущего расстояния до объекта, расчет изменения дистанции и перемещение штока на требуемое расстояние в зависимости от заданных условий.
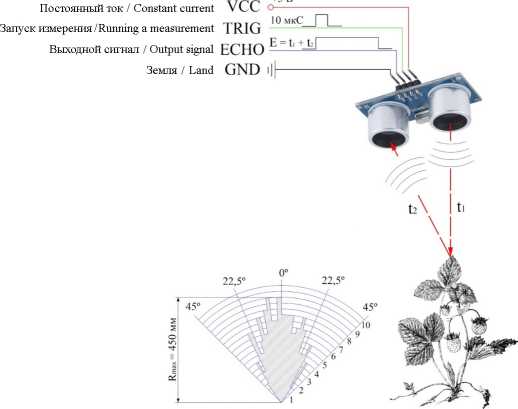
При выполнении облучения низкочастотным магнитным полем ультразвуковые датчики измеряют расстояние до объекта, генерируют узконаправленный сигнал на частоте 40 кГц и, дойдя до препятствия в виде растения, улавливают отраженный сигнал (рис. 10).
Расстояние до растения и обратно рассчитывается умножением скорости
V » 20, 042 T. (3)
Подставим формулу (3) в (1), переведя L из м в см, E – из с в мкс, T – из К в °C , и получим:
L - EJ ( t + 273,15 ) /1000 , (4)
где t ‒ температура, °C.
Показания всех датчиков агрегата, значения максимальных и минимальных высот растений под рабочей площадью индуктора передаются в микроконтроллер, где рассчитывается требуемое перемещение штока актуатора.
Для регулировки угла наклона и высоты индукторов датчики закреплены на рабочих органах и раме агрегата.
Датчики поддержания заданной высоты ( В ) магнитных индукторов установлены под углом 30°. Актуаторы в зависимости от показаний датчиков получают сигнал от микроконтроллера
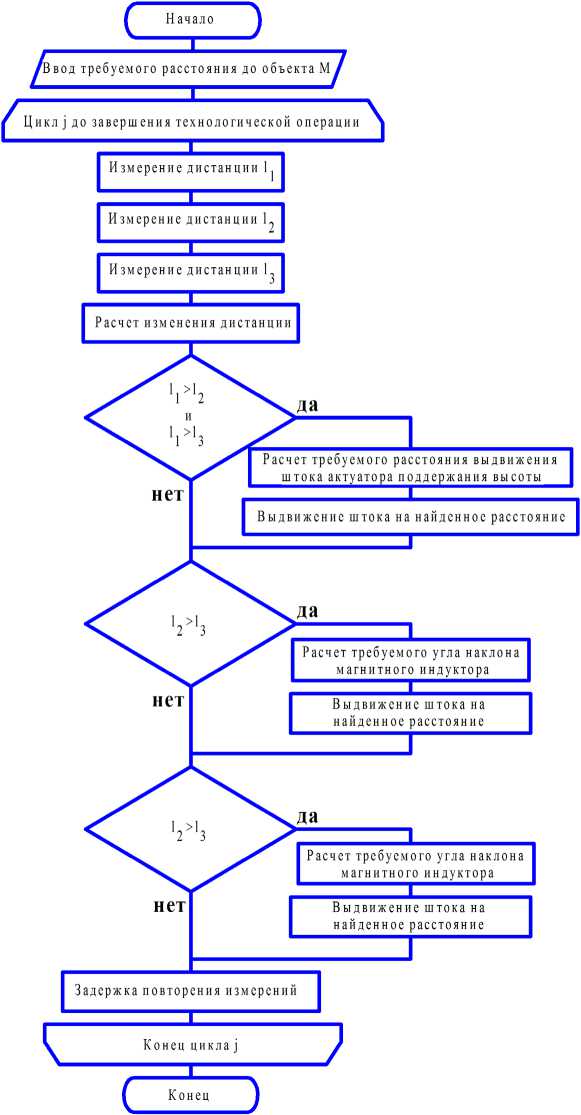
Р и с. 9. Блок-схема алгоритма работы приводов рабочих органов автоматизированного агрегата МИО
Technologies and means of maintenance in agriculture 633
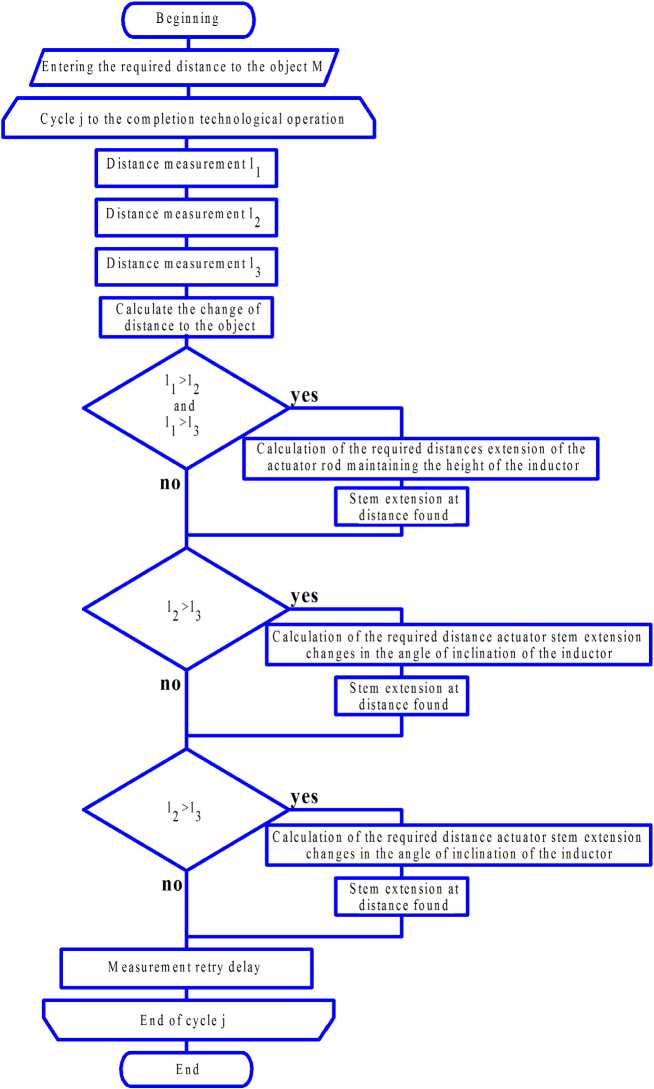
F i g. 9. Flowchart of the algorithm operation actuators of the operating elements of the automated assembly unit MPP
а) b)
Р и с. 10. Принцип работы ультразвуковых датчиков при облучении растений:
-
а) диаграмма направленности излучения датчика; b) определение дистанции до объекта МИО F i g. 10. Principle of operation ultrasonic sensors in the performance of technological operation irradiation of plants: a) radiation pattern of sensor;
-
b) determination of the distance to MPP object
и перемещают шток на требуемое расстояние, изменяя высоту h.
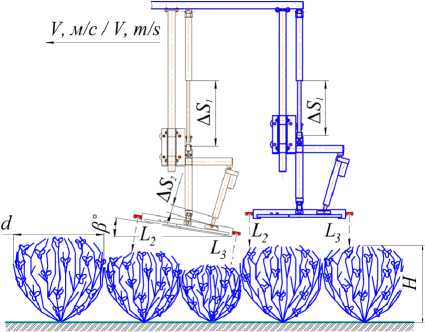
Задержка времени перемещения штока актуатора изменения высоты h магнитных индукторов зависит от расстояния b и скорости движения V автоматизированного агрегата с выбранным режимом МИО (рис. 11).
V, м/с / V, m/s
a)
b)
Р и с. 11. Схемы изменения уровня расположения магнитных индукторов:
-
а) регулировка высоты магнитных индукторов,
-
b) регулировка угла наклона магнитных индукторов
F i g. 11. Schemes of the level of magnetic inductors:
-
a) adjustment of height of magnetic inductors,
-
b) adjustment of the angle of inclination of magnetic inductors
Расстояние b находится из прямоугольного треугольника ABC:
b = c • cos ( A ) . (5)
Скорость движения агрегата находится по формуле:
3,6 ( L + d ) F
V =----- n -----м/с, (6)
где L - длина плоского индуктора рабочего органа в направлении движения агрегата, м; d - диаметр куста растений, м; F - частота следования импульсов магнитной индукции, Гц; N – число воздействующих импульсов магнитной индукции; с - показания ультразвукового датчика, м.
Отсюда можно определить время задержки подстройки рабочих органов под растения:
c • cos ( A )• N
T = 3,6 ( L + d ) F ’ с
Требуемое расстояние ΔS 1 и ΔS 2 выдвижения/втягивания штоков актуаторов в теле цикла находится по формулам:
N S 1 = c • sin ( A ) - M, мм; (8)
A S 2 = L 3 - M , мм; (9)
где M – требуемое расстояние между растением и магнитным индуктором, мм; L2, L3 – измеренное ультразвуковым датчиком расстояние от поверхности магнитного индуктора до растения, мм; sin(A) регулируемый угол наклона поворота ультразвукового датчика, град.
Изменение ширины захвата агрегата происходит также с помощью инфракрасного пульта дистанционного управления. Режим работы аппарата МИО (параметры воздействия) выбирается на блоке управления в зависимости от обрабатываемой культуры. Питание блока управления аппарата МИО и системы адаптации осуществляется от инвертора и бортовой сети тяговой машины.
Для управления рабочими органами автоматизированного агрегата разработана программа [8–10]. Фрагмент программного кода расчета требуемого перемещения штока актуатора представлен на рис. 12.
В систему управления агрегатом включены программные модули, обеспечивающие управление рабочими органами как в автоматическом режиме, так и дистанционно. Работа с программой начинается с разблокировки экрана. Далее открывается основная кнопочная форма, на которой выбирается режим работы агрегата:
-
1) ручная настройка;
-
2) выбор культуры (автоматическая).
В ручном режиме настраивается требуемое расстояние до объекта облучения, ширина захвата агрегата, угол наклона рабочих органов.
//замер дистанции до объекта // distance measurement distance = sonar.ping_cm();
//рассчёт изменения расстояния // distance calculation distanceDelta = distance - distanceLast;
-
//запоминаем текущее расстояние для дальнейших рассчётов //remember the current distance distanceLast = distance;
//вызываем функцию перемещения штока актуатора //actuator travel function motion(distanceDelta);
Р и с. 12. Программный код расчета расстояния перемещения штока актуатора
F i g. 12. The program code for calculating the displacement distance of the actuator rod
636 Технологии и средства технического обслуживания в сельском хозяйстве
Для работы в автоматическом режиме выбирается объект облучения (низкорослое / высокорослое растение), требуемое расстояние до объекта обучения и технология посадки.
Выбор режима работы осуществляется на сенсорном дисплее Nextion 2.4. (рис. 13).

Р и с. 13. Меню выбора режима работы агрегата
F i g. 13. Unit operation mode selection menu
Разработанный алгоритм работы системы управления позволяет накапливать в базе экспериментальных данных информацию о растительных объектах в полевых условиях.
Обсуждение и заключение
Созданный агрегат позволяет внедрить новый экологически безопасный технологический прием стимуляции жизненных и ростовых процессов плодовых культур, а также повысить точность выполнения операции за счет автоматической подстройки к различным агротехнологическим параметрам насаждений, обеспечивая требуемое значение магнитной индукции в рабочей зоне на растительных объектах в полевых условиях.
По результатам полевых экспериментов можно отметить, что наиболее эффективными для стимуляции жизненных процессов вегетирующих частей садовых культур являются следующие режимы агрегата МИО:
– скорость движения V = 2,5 км/ч;
– частота импульсов магнитного поля – 15,325 Гц;
– скважность – 16,145;
– значение магнитной индукции в зоне облучения – 5,05 мТл;
– форма магнитных импульсов – прямоугольная;
– направление вектора магнитной индукции – вертикально вниз.
Данные параметры обеспечивает разработанный аппарат МИО [15] c плоской спиральной катушкой апертурой из 48 витков кабеля 1 х 2,5 мм, наружным диаметром 400 мм, внутренним диаметром 30 мм и индуктивностью 373 мкГн. Числовое значение величины индукции магнитного поля на расстоянии 100 мм от центра катушки составляет 5 мТл.
Анализ схем технологического применения агрегата и результатов полевых испытания показал, что регулируемая ширина захвата в пределах 1,4–1,8 м и возможность регулировки наклона рабочих индукторов в диапазонах 0–90° позволяют применять автоматизированный агрегат на посадках земляники садовой с междурядьем 0,8–0,9 м, в садах интенсивного типа с междурядьями 3,0–3,5 м и кустарниковых ягодниках с междурядьями 2,5–3,5 м (рис. 14).
Производительность агрегата на различных типах посадки садовых культур зависит от количества используемых рабочих органов:
W CM = 0,1^ n BV•’Tvt см , га в смену;
где n ‒ количество используемых магнитных индукторов, шт.; B ‒ ширина катушки индуктивности, м; Т см продолжительность рабочей смены, ч; V ‒ ра-
Земляника садовая, схема 0,9 м х 0,4 м
Strawberry, scheme 0,9 m х 0,4 m
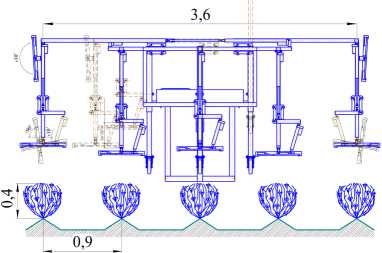

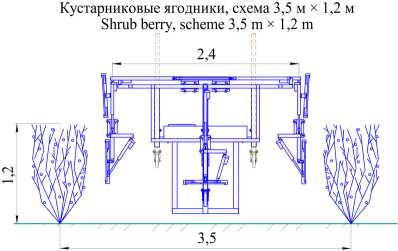

Плодовый сад, схема 3 м х 1,5 м Fruit garden, scheme 3 m х 1,5 m
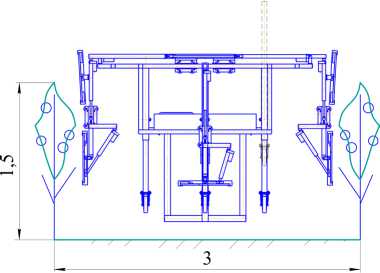

Р и с. 14. Конструктивно-технологические схемы работы автоматизированного навесного агрегата МИО в садовых насаждениях
F i g. 14. Structural and technological schemes for MPP operation of automated unit in garden plantations бочая скорость движения агрегата, км/ч; tсм коэффициент использования рабочего времени; 0,1 - переводной коэффициент, дающий размерность производительности в гектарах.
638 Технологии и средства
На землянике садовой с технологией посадки 0,9 х 0,4 м производительность агрегата МИО - 2,8 га в смену; на кустарниковых ягодниках со схемой посадки 3,5 x 1,2 м – 2,24 га в смену; в плодовом технического обслуживания в сельском хозяйстве
Т а б л и ц а T a b l e
Технико-экономические показатели применяемой и предлагаемой технологии возделывания земляники садовой
Technical and economic indicators of the applied and proposed technology cultivation of garden strawberry
Расчет экономической эффективности проведен в сравнении с типовыми картами ухода за садовыми насаждениями6–7. Для примера в таблице представлен расчет материальных затрат на уход за земляникой садовой с использованием агрегата МИО и без него.
Том 28, № 4. 2018
Анализ расчетных данных показывает, что срок окупаемости капитальных вложений на приобретение агрегата МИО и его использование на площади 10 га составляет 0,46 года, рентабельность производства увеличивается на 26,75 % за счет повышения до 20 % потенциальной урожайности обработанных низкочастотным магнитным полем садовых культур.
Об авторах:
Все авторы прочитали и одобрили окончательный вариант рукописи.
Список литературы Автоматизированный агрегат для магнитно-импульсной обработки растений в садоводстве
- Radhakrishnan R., Kumari B. D. R. Pulsed magnetic field: a contemporary approach offers to enhance plant growth and yield of soybean//Plant Physiology and Biochemistry. 2012. Vol. 51. P. 139-144. DOI: 10.1016/j.plaphy.2011.10.017
- Esitken A., Turan M. Alternating magnetic field effects on yield and plant nutrient element composition of strawberry (Fragaria x ananassa cv. Camarosa)//Acta Agriculturae Scandinavica, Section B -Soil & Plant Science. 2004. Vol. 54, Issue 3. P 135-139. DOI: 10.1080/09064710310019748
- Магнитно-импульсная обработка семян земляники садовой/А. И. Кутырёв //Сельскохозяйственные машины и технологии. 2017. № 5. С. 9-15. URL: http://www.vimsmit.com/jour/article/view/205/161
- Chao L., Walker D. R. Effects of magnetic field on germination on apple, apricot and peach seed//HortScience. 1967. Vol. 2. P. 152-153. URL: https://www.emf-portal.org/en/article/10312
- Galland P., Pazur A. Magnetoreception in plants//International Journal of Plant Research. 2005. Vol. 118, Issue 6. P. 371-389. URL: https://www.researchgate.net/publication/7485507_Magnetoreception_in_plant
- Куликов И. М., Донецких В. И., Упадышев М. Т. Магнитно-импульсная обработка растений как перспективный прием в технологических процессах садоводства//Садоводство и виноградарство. 2015. № 4. С. 45-52. URL: https://www.sadivin.com/jour/article/view/50?locale=ru_RU
- Хорт Д. О., Филиппов Р. А., Кутырёв А. И. Моделирование и анализ конструкции технологического адаптера для магнитно-импульсной обработки растений в садоводстве//Сельскохозяйственные машины и технологии. 2017. № 3. С. 29-34. DOI: 10.22314/2073-7599-2017-3-29-34
- Система автоматизированного управления параметрами агрегата магнитно-импульсной обработки растений в садоводстве/А. И. Кутырёв //Сельскохозяйственные машины и технологии. 2018. Т. 12, № 1. С. 16-21. DOI: 10.22314/2073-7599-2018-12-1-16-21
- Свидетельство о регистрации программы для ЭВМ. Программа автоматизированного управления агрегатом магнитно-импульсной обработки растений/ А. И. Кутырёв . Заявитель и правообладатель ФГБНУ ФНАЦ ВИМ (RU). № 2018614946; заявл. 26.01.2018; опубл. 19.04.2018.
- Кутырёв А. И., Хорт Д. О., Филиппов Р. А. Обоснование параметров аппарата для магнитно-импульсной обработки растений//Вестник аграрной науки Дона. 2018. Т. 1, № 41. С. 32-38. URL: http://ачгаа.рф/files/vestnik/VD1_2018_41.pdf
