Автоматизированный стенд для проведения лабораторных работ по изучению двухпозиционных регуляторов

Автор: Лебедев Константин Николаевич, Лебедев Павел Константинович
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Перспективные проекты
Статья в выпуске: 1 (38), 2023 года.
Бесплатный доступ
Основные сведения об автоматическом управлении, в частности типовые законы регулирования, изучаются студентами практически каждого технического направления среднего специального и высшего образования. В рамках изучения теории автоматического управления нами используется лабораторная установка, включающая модель брудера, двухпозиционный регулятор ОВЕН ТРМ-202, персональный компьютер с установленным ПО и адаптер интерфейсов АС-3. В процессе проведения лабораторной работы производится конфигурирование регулятора и запись данных об изменении управляемой величины по времени в различных режимах работы и/или при различных параметрах элементов, что позволяет наглядно продемонстрировать особенности двухпозиционного регулирования и современные технологии промышленной автоматизации. Также при помощи российского программного комплекса SimInTech производится структурное моделирование двухпозиционных регуляторов на основании экспериментально определенных передаточных функций элементов. Таким образом, лабораторная установка позволяет не только демонстрировать работу двухпозиционных регуляторов и производить их настройку, но и изучать свойства регуляторов в режимах, недоступных на физической модели.
Автоматизированный стенд, лабораторные работы, физический эксперимент, двухпозиционное регулирование, моделирование динамических систем
Короткий адрес: https://sciup.org/147240748
IDR: 147240748 | УДК: 378.091.6:378.091.313:62-551.3
Automated stand for laboratory work on the study of on-off controller
The basic information about automatic control, in particular the model laws of regulation, is studied by students of almost every technical direction of secondary special and higher education.. As part of the study of the theory of automatic regulation, the laboratory installation that includes a bruder model, a on-off controller OWEN TRM-202, a personal computer with installed software and an AC-3 interface adapter has been used. During the laboratory work, the controller is configured and data is recorded on the change of the controlled value over time in various operating modes and/or with different parameters of the elements, which allows to clearly demonstrate the features of two-position regulation and modern industrial automation technologies. Also, with the help of the Russian software package SimInTech structural modeling of two-position regulators is performed based on experimentally determined transfer functions of elements. Thus, the laboratory setup allows not only to demonstrate the operation of two-position regulators and adjust them to the specified quality indicators, but also to study the properties of regulators in modes that are not available on the physical model.
Текст научной статьи Автоматизированный стенд для проведения лабораторных работ по изучению двухпозиционных регуляторов
Введение . Практически по каждому техническому направлению обучения студентов среднего специального и высшего образования в рамках изучения основных принципов автоматического управления проводятся лабораторные и/или практические занятия, связанные с базовыми законами автоматического регулирования, к которым относится двухпозиционное (релейное) регулирование [1, 2]. Простота реализации, применимость к значительному числу объектов управления, отсутствие возможности неустойчивых режимов работы (свойственной непрерывным регуляторам), несложность настройки привели к широкому распространению такого рода регуляторов во всех сферах промышленности и быта. Это, прежде всего, терморегуляторы типа «нагреватель» и «холодильник».
Принцип действия двухпозиционных регуляторов заключается в выработке одного из двух возможных по величине управляющих воздействий, соответствующих позициям исполнительного элемента (обычно «включено» и «выключено») в зависимости от текущего измеренного значения управляемой величины [3]. Двухпозиционный закон управления обеспечивает приемлемое качество регулирования, если передаточное запаздывание в канале управления существенно меньше переходного запаздывания в объекте управления. Другими словами, двухпозиционные регуляторы подходят для инерционных объектов управления и в случае, если в регуляторе нет элементов с существенной задержкой сигнала (трубопроводов, конвейеров и т.д.).
Вследствие релейного принципа работы, такого рода регуляторам свойственен колебательный режим работы, что определяет периодический закон изменения управляемой величины. Нелинейный характер объекта управления и самого регулятора приводит к неоднозначной зависимости между настройками регулятора (верхним и нижним порогами срабатывания, либо уставкой и величиной зоны нечувствительности) и параметрами автоколебательного изменения управляемой величины. Имеется также зависимость между величиной возмущающего воздействия со стороны окружающей среды, а также параметрами элементов регулятора и показателями качества регулирования.
Основная часть. Наличие описанных особенностей работы двухпозиционных регуляторов наряду с распространенностью делает необходимым их изучение студентами инженерных специальностей на лабораторных установках и желательность подкрепление знаний путем моделирования на ЭВМ. В связи с этим был создан автоматизированный стенд для изучения двухпозиционных регуляторов и разработано практическое занятие по их моделированию в среде SimInTech [1, 4, 5].

Рисунок 1 – 3D модель лабораторной установки
В качестве объекта управления используется физическая модель брудера, в которой исполнительным элементом (нагревателем) является лампа накаливания (рисунок 1).
Использование лампы делает наглядным
процесс регулирования.
В качестве Структурно-
двухпозиционного регулятора применен прибор ОВЕН ТРМ-202 [6]. функциональная схема стенда показана на рисунке 2, а.
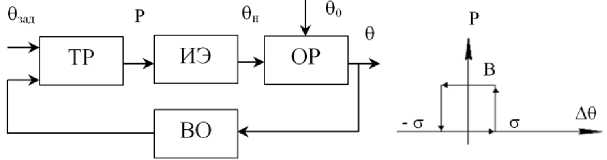
а)
б)
ОР – объект регулирования (подзонтичное пространство брудера); ИО – исполнительный элемент (нагреватель);
ВЭ – воспринимающий элемент (датчик); ТР – терморегулятор
Рисунок 2 – Структурно-функциональная схема лабораторного стенда (а) и Р = f( ∆θ ) – релейная характеристика регулятора (б)
Приняты следующие обозначения физических величин: θ – температура воздуха (регулируемая величина); θ н – температура нагревательного элемента (регулирующее воздействие); Р – мощность нагревательного элемента; θ зад – уставка регулятора (заданная температура); θ 0 – температура окружающей среды (возмущающее воздействие), Δθ – отклонение температуры от заданного значения, σ – дифференциал, В=2σ – зона нечувствительности.
Так как двухпозиционный регулятор ОВЕН ТРМ-202 поддерживает передачу данных по сети промышленного стандарта RS-485, для автоматизации процесса записи переходных характеристик в лабораторной установке применен адаптер интерфейсов ОВЕН АС-3 и персональный компьютер с установленной технологической SCADA-системой OWEN PROCESS MANAGER (OPM). На рисунке 3 представлены примеры интерфейса программы OPM, позволяющей считывать в реальном времени данные с ТРМ-202, отображать их в виде графика и сохранять зависимости управляемой величины от времени в виде файлов.
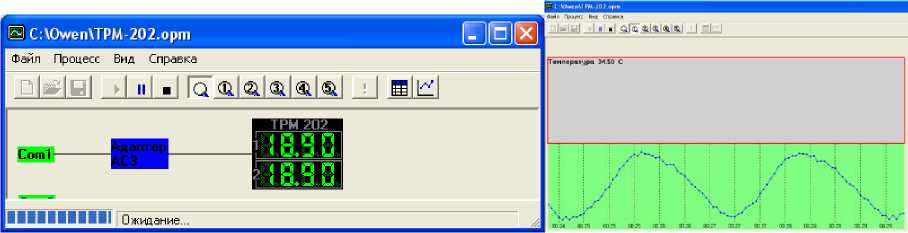
Рисунок 3 – Примеры интерфейса OWEN PROCESS MANAGER
В процессе исследования работы двухпозиционного регулятора производится формирование графиков изменения температуры и их запись в файл, включающий участки первоначального разгона до установленного значения уставки и регулирование в течение нескольких периодов колебаний управляемой величины с различными параметрами элементов регулятора. Величину уставки, какие параметры и каким образом изменять, задает преподаватель. Например, при снятии зависимости, представленной на рисунке 4, изменялась постоянная времени датчика при помощи металлического уголка, располагаемого на термометре сопротивления.
Период колебаний Т 1 с амплитудой А 1 (рисунок 4) соответствует более значительной величине постоянной времени датчика, чем аналогичные величины Т 2 и А 2 при меньшей постоянной времени. Таким образом, лабораторная установка позволяет наглядно демонстрировать двухпозиционное регулирование и изучать особенности его практического применения.
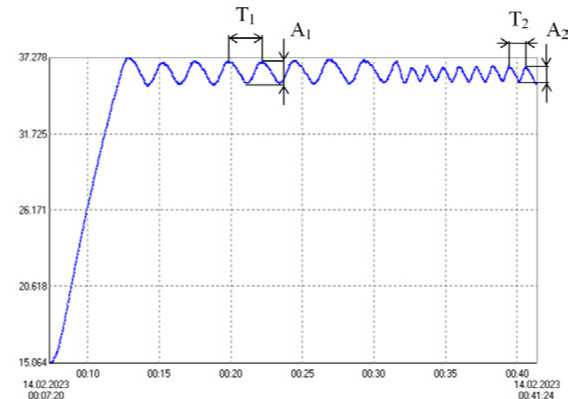
Рисунок 4 – Пример экспериментального графика изменения температуры при двухпозиционном регулировании
Распространенным методом исследования свойств динамических систем является математическое (структурное) моделирование при помощи компьютерных программ, при этом исходными данными являются передаточные функции элементов. В процессе физического моделирования на лабораторной установке по переходной характеристике можно определить передаточные функции некоторых элементов [2]. Например, задав величину уставки двухпозиционного регулятора, превышающую максимально возможную установившуюся температуру при постоянно включенном нагревателе, студенты снимают переходную характеристику (рисунок 5), по виду которой определяется, что передаточная функция W р (s) объекта регулирования совместно с исполнительным элементом (нагревателем) имеет вид апериодического звена первого порядка с постоянной времени T, приблизительно равной 7,5 минут (методика определения коэффициентов передаточной функции приведена в [7]). Коэффициент передачи можно определить как отношение приращения температуры до установившегося значения 62,4–18,4=44 0 к мощности установленной ламы накаливания 40 Вт: k=44/40=1,1 0 C/Вт. Тогда передаточная функция по управляющему воздействию имеет вид:
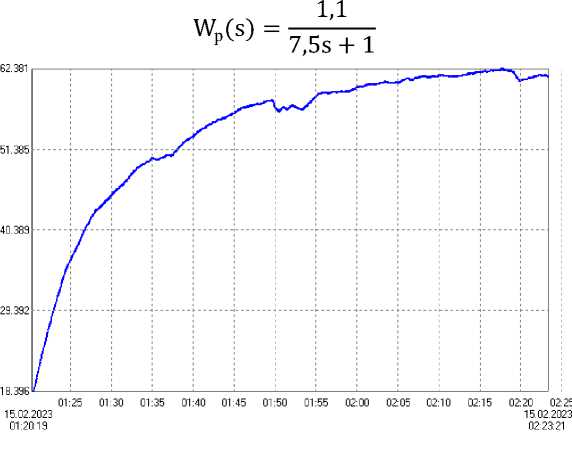
Рисунок 5 – Переходная характеристика объекта регулирования с постоянно включенным исполнительным элементом
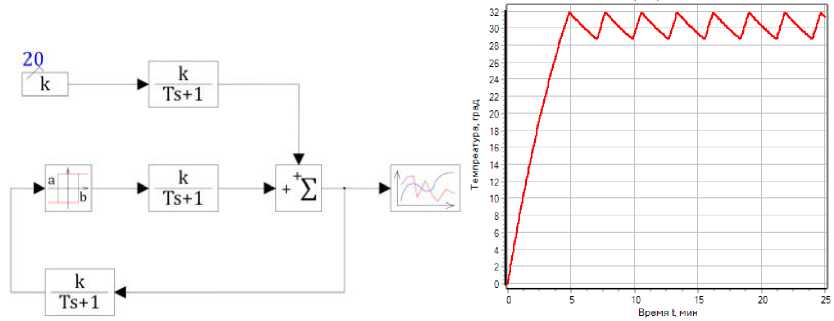
Передаточная функция по возмущающему воздействию также представляет собой апериодическое звено первого порядка с коэффициентом передачи 1 и постоянной времени 7,5 мин. Постоянная времени используемого датчика температуры Т д равна 0,3 мин, поэтому ее также можно представить апериодическим звеном первого порядка. Для цифрового регулятора, у которого уставка задается в тех же единицах измерения, что и управляемая величина, коэффициент передачи датчика равен 1. Структурная схема двухпозиционной автоматической системы регулирования показана на рисунке 6, а ее реализация в среде динамического моделирования технических систем SimInTech – на рисунке 7, а. Результат моделирования работы двухпозиционного регулятора с уставкой 30 0 C и дифференциалом 1 0 в SimInTech показан на рисунке 7, б.
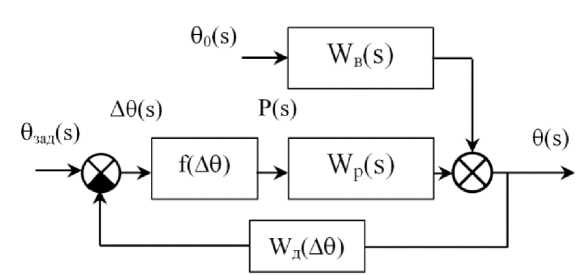
Рисунок 6 – Структурная схема автоматической системы регулирования
-
а) б)
Рисунок 7 – Машинная структурная схема автоматической системы регулирования (а) и расчетная переходная характеристика (б)
Заключение. Так как подготовка студентов среднего специального и высшего образования по инженерным направлениям должна сочетать получение систематизированных теоретических сведений с наглядностью физических и вычислительных экспериментов, разработанная нами лабораторная установка позволяет изучать процесс двухпозиционного регулирования в разных режимах и при разных параметрах элементов, демонстрируя современные технологии промышленной автоматизации, включая работу двухпозиционных микропроцессорных регуляторов, их конфигурирование, технические и программные средства передачи данных и их отображение на мониторе оператора с архивацией измеренных значений. Также при помощи программы моделирования динамических систем SimInTech может производится исследование регуляторов, в том числе в режимах, не доступных на физической модели.
Лебедев Константин Николаевич, кандидат технических наук, доцент кафедры «Математика и биоинформатика»,
Лебедев Павел Константинович, студент факультета среднего профессионального образования по направлению 35.02.08 «Электрификация и автоматизация сельского хозяйства»,
Азово-Черноморский инженерный институт ФГБОУ ВО Донской ГАУ, г. Зерноград, Российская Федерация.
Azov-Black Sea Engineering Institute, Federal State Budgetary Educational Establishment of Higher Education Donskoy State Agrarian University, Zernograd
Azov-Black Sea Engineering Institute, Donskoy State Agrarian University, Zernograd,
Russian Federation.
Список литературы Автоматизированный стенд для проведения лабораторных работ по изучению двухпозиционных регуляторов
- Лебедев К.Н., Карташов Б.А. Автоматика: практикум. - Зерноград; Азово-Черноморский инженерный институт ФГБОУ ВО Донской ГАУ, 2019. - 103 с.
- Лебедев К.Н. Автоматика: лабораторный практикум. - Зерноград: Азово-Черноморский инженерный институт ФГБОУ ВО Донской ГАУ, 2017. 117 с.
- Двухпозиционные регуляторы. [Электронный ресурс]. Режим доступа: https://automation-system.ru/main/15-regulyator/type-of-control/24-75-dvuxpoziczionnye-regulyatory.html (дата обращения - 02.03.2023).
- Среда динамического моделирования SimInTech. [Электронный ресурс]. Режим доступа: https://simintech.ru/(дата обращения - 02.03.2023).
- Карташов Б.А., Шабаев Е.А., Козлов О.С., Щекатуров А.М. Среда динамического моделирования технических систем SimInTech: Практикум по моделированию систем автоматического регулирования. - М.: ДМК Пресс, 2017. -424 с.
- ТРМ202 двухканальный регулятор с универсальным входом и RS-485. [Электронный ресурс]. Режим доступа: https://owen.ru/product/trm202 (дата обращения - 02.03.2023).
- Лебедев К.Н. Автоматизация управления технологическими процессами: учебное пособие. - Зерноград, ФГОУ ВПО АЧГАА, 2013. - 154 с.
