Автоматизированый мониторинг транспортного потока в сервисе автомобильных экосистем

Автор: Маковецкая-Абрамова Ольга Валентиновна, Маковецкий Валентин Архипович, Силла Светлана Александровна
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Диагностика и ремонт
Статья в выпуске: 4 (10), 2009 года.
Бесплатный доступ
Проведена сравнительная оценка эффективности различных методов и средств сбора ин-формации о параметрах автотранспортного потока. Получена информация о составе транс-портного потока по характерным признакам оптических образов транспортных средств, ре-зультат математической обработки, регистрируемых сигналов получен в реальном времени.
Мониторинг, метод произведений, оптико-электронная система иденти-фикации, оптические образы транспортных средств
Короткий адрес: https://sciup.org/148185804
IDR: 148185804 | УДК: 656.021.8
Текст научной статьи Автоматизированый мониторинг транспортного потока в сервисе автомобильных экосистем
О. В. Маковецкая-Абрамова1, В.А. Маковецкий2, С.А. Силла3
-
1,3 Санкт-Петербургский государственный университет сервиса и экономики
192171, Санкт-Петербург, ул. Седова 55/1
2 Владимирский государственный университет
600000, Владимир, ул. Горького 87
Проведена сравнительная оценка эффективности различных методов и средств сбора информации о параметрах автотранспортного потока. Получена информация о составе транспортного потока по характерным признакам оптических образов транспортных средств, результат математической обработки, регистрируемых сигналов получен в реальном времени. Ключевые слова: мониторинг, метод произведений, оптико-электронная система идентификации, оптические образы транспортных средств.
Широкое внедрение электронной техники в организацию движения и управления транспортными средствами (ТС) в сервисе автомобильных экосистем направлено, прежде всего, на снижение показателей аварийности. Качественные преобразования в системе «Транспортное средство - водитель - дорога» возможны при наличии точной информации о количественном и качественном составе транспортного потока (ТП). Сегодня существует необходимость пересмотра и уточнения методик определения состава потока. Наиболее перспективны исследования с применением новых информационных технологий. Сравнительный анализ различных методов регистрации и распознавания образов ТС (индукционных, ультразвуковых, магнитометрических, радиолокационных и др.) показал, что каждый из вышеперечисленных методов обладает рядом достоинств, однако имеются и существенные недостатки, такие как достаточно высокая погрешность определения параметров транспортного потока, большие габариты, высокая стоимость установок и высокая стоимость монтажа. Недостатком является также регистрация избыточной информации о ТС многократно превышающей необходимый объем, усложняющий и уд- линяющий во времени процесс идентификации. Организация дорожного движения должна осуществляться автоматизированными системами, адаптированными к изменениям параметров транспортного потока, работающими на основе оперативной информации о ситуации на дороге в реальном масштабе времени.
Методика получения сигналов с помощью пластинчатых растров изложена в работах [1,2]. Установка, позволяющая работать на трассе, вошла в состав передвижной лаборатории [3]. Лаборатория смонтирована на базе автомобиля и включает в себя (рис.1): выносной блок 1, источники питания 2, и компьютерный регистратор 3. Выносной блок размещают на багажном отсеке крыши автомобиля или устанавливают на теодолитной треноге вблизи дорожного полотна. В его состав входят четыре растровых датчика, расположенных на жесткой рейке, которая крепится на платформе. Пластинчатые растры ставят на малом расстоянии друг от друга так, чтобы их оптические оси были перпендикулярны осевой линии дороги.
Рисунок 1 – Передвижная лаборатория:
1 – выносной блок ; 2 – источник питания;
3 – регистрирующий блок
Данное расположение реализует способ определения параметров ТП в сечении дороги. На платформе установлена видеокамера, которая позволяет документировать информацию на этапе отладки, настройки и обучения системы мониторинга. Блок питания состоит из автомобильного аккумулятора (АА), к которому подсоединен источник бесперебойного питания (ИБП) АРС-500. В состав компьютерного регистратора входят монитор и системный блок (СБ) Pentium. На материнскую плату СБ установлен многоканальный аналого-цифровой преобразователь (АЦП), на который через крейт заводится сигнал с растровых датчиков. Существующие ПК и АЦП позволяют производить запись данных на диск на частотах ввода до 330 кГц. Передвижная лаборатория может размещаться на любом участке исследуемой дороги и работать в непрерывном режиме длительное время (опыт показывает, что аппаратура может работать в режиме непрерывной регистрации более 10 дней). Описываемая установка была использована для получения информации о ТП на различных дорогах г. Владимира. Пакет программного обеспечения позволяет оперативно получать необходимые данные.
В качестве примера на рис. 2 приведен результат регистрации оптических сигналов при движении транспорта по 4 полосам объездной дороги. На графиках рис.2 по оси абцисс время существования сигнала в миллисекундах, по оси ординат интенсивность сигнала в относительных единицах. Как видно из рис.2, аппаратура надежно фиксирует движущиеся транспортные средства, получаемые сигналы получили название оптических образов автомобилей.
Мониторинг транспортных потоков оптико-электронной системой на основе пластинчатого растра производится по результатам математической обработки регистрируемых сигналов в режиме реального времени. Выбор числа растров обусловлен конкретной задачей использования устройства на практике. Сложность применяемых алгоритмов зависит от количества классов ТС, подлежащих идентификации.
Наличие репрезентативного набора признаков оптического образа позволяет применить различные методы, например, метод произведений. Основой метода произведений является синтез критериев (гомогенных комплексов параметров), характеризующих некую систему или развитие событий. Применение метода предусматривает несколько этапов:
-
- нахождение основных влияющих величин, играющих роль аргументов;
-
- выделение этих величин из шумов и измерение их;
-
- синтез определительного уравнения в виде (1), тем самым формирование интересующего критерия.
Условием справедливости принципа абсолютности отношений для законов физики в любых системах первичных величин является гомогенность определяющих уравнений. Но гомогенны только степенные выражения:
y = Ax a 1 • x a 2 •••• xk i . (1)
Поэтому отыскание физических связей между различными величинами должно проводиться путём построения уравнения в виде (1). Значения величин ми размерностей или размерностью вторичной величины. Такой подход к исследованию физических процессов получил название анализа размерностей [4].
a1, a2,..., aK называются показателя-
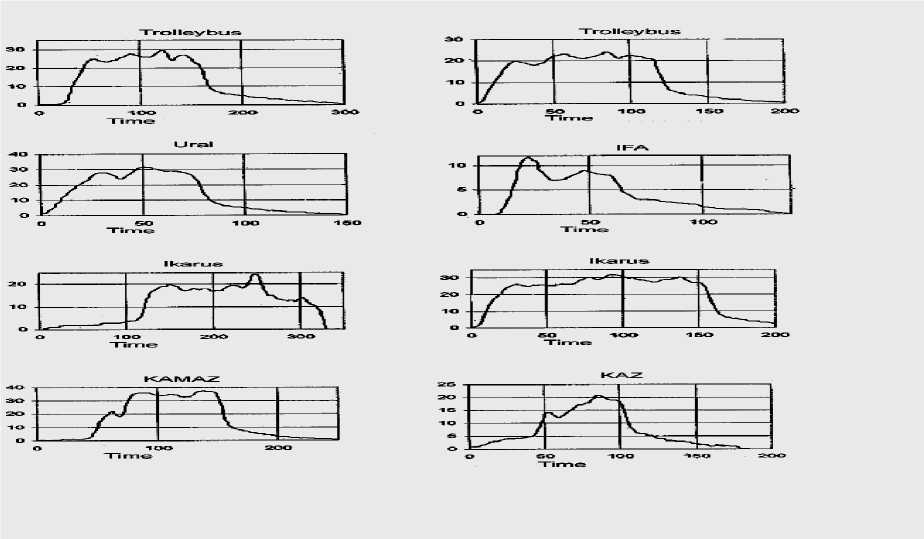
Рисунок 2 - Оптические образы ТС
В случае применения метода произведений статистической обработке таблицы наблюдений отводится лишь частная роль, а именно, вычисление парных коэффициентов корреляции с целью облегчения отыскания аргументов, т.е. основных влияющих факторов. Создание количественной единицы сводится к следующим операциям:
-
1. Выбирается ряд взаимно независимых показателей системы, достаточно полно описывающих её состояние. Эти показатели оцениваются числами.
-
2. Корреляционным анализом находится теснота связи этих показателей (взятых в различных степенях) с параметром, для которого должна быть установлена единица измерения.
-
3. Формируется определяющее произведение и устанавливается единица измерения.
-
4. Проверяется надёжность установленной единицы вычислением коэффициента корреляции между величинами сформированного
произведения и исследуемого параметра. Этот коэффициент должен быть близок к единице, что обеспечивает почти функциональную зависимость между указанными величинами.
Применение метода произведений позволяет идентифицировать ТС, т.к. значения определяющих произведений существенно отличаются для автомобилей разных классов, что показано на рис.3.
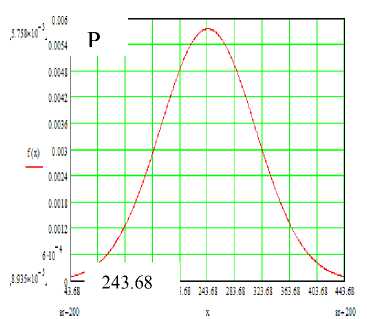
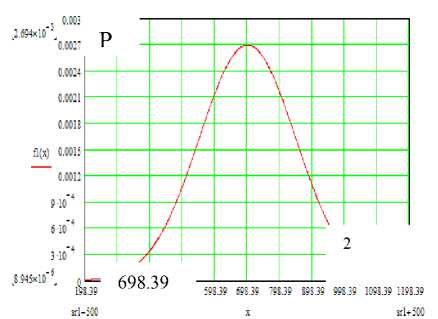
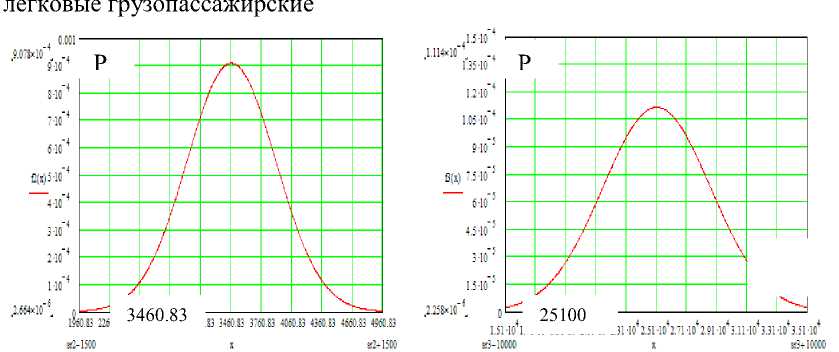
грузовые автобусы y = ∆t ⋅ Amax - определяющее произведение
Рисунок3 – Распределение значений определяющих произведений по классам
Применение данного алгоритма позволяет идентифицировать ТС по собственному оптическому сигналу в потоке с высокой интенсивностью движения. Время обработки сигнала менее одной секунды.
