Автономное цифровое управление мини-спутником землеобзора в режимах начальной ориентации

Автор: Сомов С.Е., Сомова Т.Е.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 5 т.22, 2020 года.
Бесплатный доступ
Рассматриваются задачи автономного цифрового управления ориентацией космического аппарата и проверки работоспособности системы управления его ориентацией в начальных режимах. Представлены разработанные методы, алгоритмы и результаты имитации процессов управления ориентацией миниатюрного спутника землеобзора на солнечно-синхронной орбите. Для приведения ориентации космического аппарата из произвольной к требуемой применяется автономное угловое наведение и модульно ограниченное векторное цифровое управление с использованием вектора модифицированных параметров Родрига. Кратко обсуждается проблемы верификации работоспособности системы управления ориентацией мини-спутника.
Мини-спутник землеобзора, начальная ориентация, автономное цифровое управление
Короткий адрес: https://sciup.org/148312684
IDR: 148312684 | УДК: 629.78 | DOI: 10.37313/1990-5378-2020-22-5-84-93
Autonomous digital control of the earth geodetic mini-satellite in initial orientation modes
Methods for guidance and motion control of a space robot during a flyby of a geostationary satellite at a visual monitoring its technical state are considered. Numerical results are presented that demonstrate the effectiveness of the developed discrete guidance and control algorithms.
Текст научной статьи Автономное цифровое управление мини-спутником землеобзора в режимах начальной ориентации
После отделения любого малого низкоорбитального космического аппарата (информационного спутника [1], космического робота [2] и т.д.) от верхней ступени ракеты-носителя такой космический аппарат (КА) начинает кувыркаться – вращаться с вектором угловой скорости ω изменяемого направления в связанной с ним системе координат (ССК) O xyz . Основное назначение начальных режимов системы управления ориентацией (СУО) состоит в приведении ориентации КА к заданной в орбитальной системе координат (ОСК) O x o y o z o . Затем космический аппарат с помощью собственной двигательной установки перемещается в заданное положение на целевой орбите и начинает выполнять свои задачи при его удержании на этой орбите [3].
обеспечивающих непрерывное обновление видеоданных. Стоимость их разработки, а также изготовления и вывода на орбиту невелика, что объясняет превращение таких спутников в массовый продукт для ДЗЗ, а также для быстрой практической проверки новых космических технологий. Широкое использование малых спутников землеобзора стало также стимулом развития инновационных технологий, направленных на совершенствование их бортовых систем и целевой аппаратуры.
В данной статье рассматривается миниспутник землеобзора (рис. 1) массой 250 кг, оснащенный телескопом с апертурой 0.4 м, который отделяется от верхней ступени ракеты-носителя на солнечно-синхронной орбите высотой 600 км. Предполагается, что такой миниатюрный КА оснащён системой управления движением,

Рис. 1. Мини-спутник землеобзора
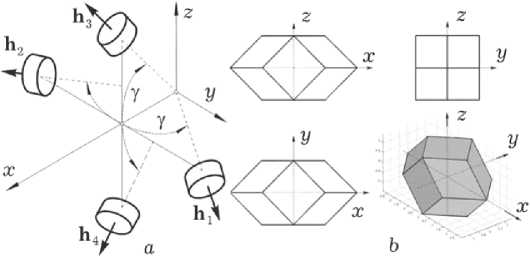
Рис. 2. Схема GE ( a ) и оболочка ее КМ ( b )
содержащей бесплатфрменную инерциальную навигационную систему (БИНС) с коррекцией по сигналам спутников GPS/ГЛОНАСС и звездных датчиков, кластер гироскопических датчиков угловой скорости (ДУС), трехосный магнитометр (MM), а также следующие бортовые приводы: двигательная установка (ДУ), кластер четырех двигателей-маховиков (ДМ) по схеме General Electric ( GE ), рис. 2, и магнитный привод (МП). Мы изучаем нелинейные проблемы управления КА в следующих режимах начальной ориентации (РНО):
-
(i) успокоение вращательного движения КА в инерциальной системе координат (ИСК) с помощью цифрового управления МП по сигналам кластера ДУС когда модуль вектора угловой скорости to = | to | > го j при заданном значении го ,;
-
(ii) инициализация кластера ДМ, включение его в контур управления КА и последующее приведение КА по сигналам БИНС к требуемой ориентации в ОСК;
-
(iii) угловая стабилизация КА в ОСК при автономном цифровом управлении кластером ДМ, в том числе при его разгрузке от накопленного кинетического момента (КМ) с использованием МП, для подготовки СУО спутника к полётной верификации её работоспособности.
Методы решения таких задач без использования каких-либо ДУ ранее были представлены в [4]. Недостатками этих разработанных методов являются необходимость временной программы пространственного наведения КА с использованием прогноза терминальных граничных условий и большая длительность приведения углового положения спутника к требуемой ориентации в ОСК.
В отличие от такого подхода, здесь в развитие [5] решается задача автономного углового наведения КА при отслеживании значений вектора модифицированных параметров Родри-га (МПР) эталонной модели с использованием модульно ограниченного вектора цифрового управляющего момента кластера ДМ в процессе приведения ориентации спутника из произвольной в ИСК к требуемой в орбитальной системе координат. Мы также кратко обсуждаем проблемы проверки работоспособности СУО в режимах начальной ориентации.
МОДЕЛИ И ПОСТАНОВКА ЗАДАЧИ
Минимально-избыточная схема GE класте- ра ДМ, рис. 2, обладает возможностью управлять ориентацией КА при отказе любого одного маховика. Здесь в ССК Oxyz оси вращения четырёх ДМ располагаются на поверхности конуса с углом полу-раствора у. Далее используются стандартные обозначения {•} = с°10,
[ • ] = line(/) , • , ) , ( • ) , [ х ] и ° ,~ для векторов,
матриц и кватернионов, С Y = cos у , S Y = sin у , 7—123 т = 1 4- т
,^,-'••• m m и применяется вектор
МПР о = {о i} = е tg(Ф /4) с традиционными обозначениями орта Эйлера e и угла Ф соб ственного поворота. Вектор ст взаимно-одно значно связан с кватернионом Л = (X 0, X), Х = {X i} ориентации КА в ИСК прямыми О = Х/(1+ Х0) и обратными X0 = (1 -О2)/(1 + О2), X = {Xi} = 2о /(1 + О2) соотношениями.
Модель углового движения КА учитывает упругость его конструкции и имеет вид
Л = Л ° го/2 ; A ° {со , q , Q } = { F to , F q , F r } , (1)
F го=- [ ю x ] G + M m + M d ;
F q = - A q ( V q q + W q q ) ; F r = m - m f ;
A °
A Y
J D q J r A Y
D ‘ A q 0
q
J r A Y 0 J r 1 4
c c c
Y Y Y
S Y - S Y 0
0 0 S Y
C Y 0 - S Y
Здесь G = G ° + Dqq является вектором КМ электромеханической системы, где G ° = К + Н и K = Jro, столбцы Н = {Н i}, i = 1 ^ 3 и h = {h p }, h p = JrQ p, p = 1 ^ 4 представляют КМ кластера и отдельных ДМ, которые связаны соотношением Н = AY h, где матрица AY составлена из ортов осей ДМ в базисе B ;
A q = diag{цД; V е = diag{jQ s }
W q = diag{( Q s )2}; M m = { m “ }; m = { m p }; m f = { m p };
вектор механического момента МП M m = { m ™ } = - L x B , где вектор электромагнитного момента (ЭММ) L = { l i } с ограниченными компонентами | l i | < l m и вектор индукции магнитного поля Земли B = b B с ортом b определены в ССК ; векторы-столбцы m = { m p } и m f = { m p } представляют управляющие моменты и моменты сил сухого трения по осям вращения ДМ, а вектор M d - внешние возмущающие моменты. Ресурсы каждого ДМ по управляющему и кинетическому моментам ограничены, | m p ( t )| < m m ,| h p ( t )| < h m , p = 1 + 4 . Далее используется вектор M r = {M rr } управляющего момента кластера ДМ в виде M г = - Н , где ( • ) * – символ локальной производной по времени.
Если КА считать свободным твердым телом, который управляется только кластером ДМ, и СУО сбалансирована по вектору суммарного кинетического момента (вектор G ≡ 0 ), то модель (1) пространственного углового движения КА принимает вид
Л = Л ° о / 2 ; о = J - 1 М г = е = и . (2)
Пусть для формирования управления u применяются измерения кватерниона Л(t), которые используются для вычисления вектора МПР а( t) , и вектора угловой скорости to (t). Кинематическому уравнению в (2) соответствует соотношение a = (1 — a2)to/4 + охю/2 + a(a, to)/2 для вектора МПР σ , поэтому при векторе управляющего углового ускорения u ≡ ε модель (2) представляется в нормированной непрерывной векторной форме а = ^(1 — a2)to + 2axto +1 a(a, to); to = u (3) с заданными начальными условиями О(t0) = ао , О(tо) = Оо при tо = 0, где при обозначении eо = e(to) вектор ао = eо tg(Фо/4) является произвольным с условием | Фо |< 2п.
Как известно, кватернион - Λ задает вращение КА на угол 2 п — Ф вокруг орта Эйлера - e , которое полностью совпадает с вращением этого объекта на угол Φ вокруг орта Эйлера e , т.е. значения Λ и - Λ совпадают. Следовательно, при Φ = π возникает проблема двузначности кватерниона и требуется конкретизировать его значение вместе с направлением орта Эйлера. Для вектора МПР σ такая проблема не проявляется V Ф e ( — 2 п , 2 п ) . Поэтому далее принимается эталонная модель (3)
автономного пространственного наведения с вектором МПР
σ
, вектором угловой скорости
ω
и вектором ускорения
ε
≡
u
, который формально считается управлением. Будем считать, что вектор такого управления
u
=
{u
i
}
ограничен по модулю
|
u
(
t
)|
=
и
(
t
)
<
um
,
um
>
0
, а вектор
to
(
t
)
=
{
to
i
(
t
)}
ограничен по модулю
|
to
(
t
)|
= to
(
t
)
При законе наведения КА, заданного кватернионом Л p ( t ) , векторами угловой скорости to p ( t ) и углового ускорения 8 p ( t ) , погрешность ориентации ССК O xyz определяется кватернионом Е = ( e 0 , e ) = Л p ° Л при векторе e = {e i } , которому соответствуют матрица ошибки ориентации C e = I 3 — 2[ e x ] Q ) , где матрица Q e = I 3 e 0 + [ e x ] , вектор модифицированных параметров Родрига a e = { a e } = e /(1 + e 0 ) = e e tg( O e /4) с ортом e e оси Эйлера и углом ф e собственного поворота, а также вектор угловой погрешности 5 ф = {5ф i }={4 a e } . При этом вектор ошибки S to ( t ) = to e ( t ) по угловой скорости вычисляется на основе соотношения to e = to — C e to p ( t ) .
Предположим, что дискретное измерение кватерниона Л I - Л ( t1 ) ориентации КА в ИСК выполняется БИНС в моменты времени tl , 1 e N0 ^ [0,1,2,...) периодом Tp , в моменты времени t k , k e N0 с периодом Tu формируется цифровое управление кластером ДМ, а цифровое управления МП действует V t e [ t r , t r + 1) , r e N0 с периодом Т Ц1 > T u .
В данной статье решаются следующие задачи:
-
(i) разработка дискретных алгоритмов цифрового управления как МП, так и кластером ДМ с учетом особенностей их применения в СУО мини-спутника;
-
(ii) синтез нелинейного цифрового закона управления u k = u ( a k , to k ) в эталонной модели (2) & (3) автономного наведения при ограниченных модулях векторов управления и угловой скорости, который обеспечивает асимптотическую устойчивость замкнутой непрерывно-дискретной эталонной модели;
-
(iii) синтез нелинейного цифрового закона управления кластером ДМ, который после завершения режима успокоения спутника обеспечивает переход КА из произвольной ориентации в ИСК в требуемое угловое положение в ОСК;
-
(iv) компьютерная имитация работы СУО в режимах начальной ориентации геодезического мини-спутника на солнечно-синхронной орбите при его автономном угловом наведении и управлении;
-
(v) краткое обсуждение проблем проверки работоспособности СУО мини-спутника.
ЦИФРОВОЕ УПРАВЛЕНИЕ МАГНИТНЫМ ПРИВОДОМ
Когда КА моделируется как твердое тело ( M d = 0 , M r = 0 и G = K ), управляемое только МП, то согласно (1) модель его динамики представляется в виде K = M — to х K , где K = K * = Jc o и внешний управляющий момент M = M m . Для синтеза локально оптимальных непрерывных законов управления M = M ( to ) применялась функция Ляпунова v = K 2 = ( K , K ) . В результате установлено [4], что в режиме успокоения КА с минимальным принуждением M 2 = | M | 2 закон управления имеет вид M = — a K k с ортом k = K /К и постоянным параметром a > 0 , а закон управления M = — m k с постоянным параметром m > 0 представляет управляющий момент, оптимальный по быстродействию.
При цифровом управлении МП будем m считать, что в моменты времени t r = rT u вектор индукции магнитного поля Земли B r = B ( t r ) = B r b r измеряется магнитометром. При формировании команды M r = — a K r для вектора механического момента МП на каждом полуинтервале времени t е [ t r , tr + 1) с заданным периодом T™ сначала определяется вектор потребной вариации импульса ( pulse ) управляющего момента
M f = j + М ( т ) d т = - a j + К ( т ) d т
-
= - К r (1 - ехр( - aO) k r .
Этот вектор представляется в виде M p = b r х ( M p х b r ) + b r ( M p , b r ) и для энергетической экономичности МП назначается вектор M p = M p m = b r х ( M p х b r ) с условием ( M p , b r ) = 0 .
Вектор потребной вариации импульса управляющего момента МП M p m = —A I m k r с модулем A I “ = К r (1 - ехр( - aT™) и ортом k r далее используется для формирования цифрового управления ЭММ L r = { l ir } МП с периодом T™ . При этом определяется взаимная ориентация ортов b r и k r , если | ( b r , k r )| > cos( n /3) , то на текущем периоде дискретности МП не включается, иначе формируется вектор ЭММ L r = ( A I ™ 1 7 H m)( b r x k r )/ B r с ограниченными компонентами | l r | < l m .
ЦИФРОВОЕ УПРАВЛЕНИЕ ДМ
В задаче идентификации момента сил сухого трения по осям вращения ДМ для простоты рассмотрим только один ДМ, при этом индекс p не используется. Простейшая модель движения ДМ представляется в нормированном виде Q(t) = a(t) — af(t), где управляющее ускорение a = m / Jr, ускорение a f(t) = ao sign(Q(t) е [—af, af] отражает влияние момента сил сухого трения и при моменте инерции ДМ Jr параметр a0 = mf / Jr = const . В предположении af (t) = a f(ts) = as = const Vt е [ts, ts+1), где ts+1 = ts + Tq) с периодом Tq < Tu, для получения оценки as значения asf применяется дискретный идентификатор Луенбергера
Q s + 1 = Q s + ( a s — a i s ) T s + g f SQ s ;
af+1 = af + g2SQs; sqs+1 = qs+1 —Qs+1, где постоянные параметры gf и g2 определяются по явным соотношениям. Дискретная оценка момента сил сухого трения получается в f f f виде m (ts) = ms = Jr as.
Компенсационная схема разгрузки кластера ДМ основана на следующих положениях. Вычисляются потребная вариация модуля A I m и орт k r вектора потребного импульса механического момента МП в ССК. Далее рассчитывается постоянная команда М ^ u = { m ™} =A I m b r I T™ компенсации импульса механического момента МП, которая одновременно с периодом управления Tum поступает как на МП, так и с периодом управления Tu на кластер ДМ, но с обратным знаком.
Для кластера четырех ДМ принципиальная проблема заключается в распределении векторов его кинетического Н и управляющего М г =- Н моментов при избыточном числе двигателей- маховиков. При некоторых упрощениях эта проблема состоит в одновременном решении двух уравнений
A Y h = Н V Н е R 3, V h е R 4;
A Y m = Н * =- М г V М г е R 3, m е R 4.
Используемый подход к разрешению этих уравнений основан на применении скалярной функции автоматической настройки кластера, которая позволяет однозначно распределять векторы Н и М г =- Н между четырьмя ДМ по явным аналитическим соотношениям [6]. Введем нормированный вектор КМ кластера h = { x , y , z } = Н / Н т = A Y h , где x = x 1 + x 2 ,
X 1 = C Y ( h l + h 2 ) , x 2 = C Y ( h 3 + h 4) ;
y = S 'Y ( h 1 — h 2 ) , z = ^ Y ( h 3 — h 4 ) ;
h = { h p } , h p = h p /h m , | h p | < 1 .
Распределение этого вектора между четырьмя ДМ выполняется по закону
f
р = x - x2 + р(xx2 -1) = 0, где 0 < p <1; ~i = xi /qy;x2 = x2 / qz, qs = (4CY — s2)1/2, s = y,z, на основе соотношений
-
(i) q = q y + q z ;
a ( q / p )(l - (1 - 4 p [( q y - q z )( x /2)
+ p ( q y q z - ( x /2) 2 )]/ q 2 ) 1/2 );
x 1 = ( x + A )/2 , x 2 = ( x -A )/2 ;
-
(ii) распределение КМ между ДМ в каждой паре по очевидным формулам;
-
(iii) вычисление столбца m = { m p } по явной формуле
m = - ({ А y , a f}) - 1{( M k + M^X sat^, Ц р f , )} (4)
с параметрами фр , Цр > 0 и компонентами строки a f = [ a f ] в виде
, 2 C ' , C ( h, + h. )
a f 2 =4" [2 C 2 ± S 2 h 2 ( h i — h 2 )][ 1 + P 2 3 ] ;
’ q y q z
, 2 C C ( h + h 2)
a f4 =^[2 C 2 + S 2 h 4 ( h 3 — h 4 )][1 + P 2 1 ]
’ qz qy, с явным учетом команды Mku для приближенной компенсации влияния моментов МП при разгрузке кластера ДМ. В завершении формирования цифрового управления ДМ выполняется переопределение mк := mк + nf, где mf является столбцом, составленным из текущих оценок mк моментов сил сухого трения по осям вращения ДМ.
ЭТАЛОННАЯ МОДЕЛЬ НАВЕДЕНИЯ
При использовании диадного произведения [ а • Ь ] 3-мерных векторов a = { a i } и Ь = { b . } , которое представляется как [ а • b ] = ab t = С = || c ij || = || a i b j || , прямые и обратные кинематические уравнения для вектора МПР о имеют вид о = В ( о ) го и го = D ( o ) d , где матрицы
В ( о ) = 1 (1 -о 2) 1 3 +1 ([ о х] + [ о • О ] ;
D ( o ) = В - 1 ( о ) = (8/(1 + о 2 ) 2 ) B t ( о ) .
Компактное представление второй производной векторной функции о даётся соотношением
о = 1 (- о, О)го +1(1 - о2 )е + о х ®+ О х е + (о, ю)о + (о, ю)о + о(о, е).
В итоге модель (3) сводится к нелинейной управляемой системе в форме Бруновского о = v = Ь(о, го) + В(о)и, где векторная функция
Ь ( о , го ) = ([( В ( о ) го ) х ] + [ о ^ В ( о ) го )] го / 2 .
Применение методов линеаризации обратной связью, модального синтеза и векторных функций Ляпунова [7] для модели о = v на едином желаемом спектре S* = (-а± jв) с j = 7—1 приводит к непрерывному нелинейному закону управления v = -(коо + kгоо) = -(коо + кгоВ(о)го) с постоянными коэффициентами, который при обеспечении требуемой асимптотической устойчивости тривиального решения о (t) = 0, го (t) = 0 представляется в дискретном виде v к ={v к} = -(к d° к+к гов(о к)го к).
Здесь при заданном времени регулирования T r коэффициенты к d d и к “d вычисляются по явным аналитическим соотношениям to * = 3/( ^T r ) ; а = А -х, в = to * 4 1 -^ 2 ) ;
a 1 = - 2ехр( -а Т „ )cos( p T ), a 2 = exp( - 2 a T „ ); k 0 = (1 + a 1 + a 2 )/ T M 2, k to = (3 + a - a 2 ) /(2 T „ ), которые справедливы V ^ > 0 .
Предварительныйнепрерывныйзаконуправ-ления u = {wj = u(o, to ) = D(o)( v - b(o, to)) обеспечивает равномерную асимптотическую устойчивость тривиального решения для модели (3), а его дискретная форма представлена соотношением uk =-[D(ok)(k0°k + b(ok,tok)) + ktotok]. (5)
При окончательном формировании цифрового управления u к ( о к , го к ) = { ик } в очередной момент времени t k учитываются ограничения на модуль вектора управления ( u ( t ) < u m ) и модуль вектора угловой скорости ( го ( t ) < го т ) по следующему простому алгоритму A :
-
1) по значению цифрового управления и к (5) в момент времени t k вычисляется прогнозное значение вектора угловой скорости to к = to k + u k T u , достигаемое в конце интервала времени длительностью Tu , и если | to к | > to m , то управление u к переопределяется как uk = ( (to m tok p / tok p ) - tok )/ Tu ;
k kk k u
-
2) далее, если | u к | = ~ к > u m , то формируется управление u к = u m u к / ик , иначе u к = ~ к .
Для проверки работоспособности разработанного цифрового закона управления в эталонной модели наведения рассмотрим простейшую каноническую задачу. Пусть для эталонной модели наведения (3), определенной в ИСК, в момент времени to = 0 заданы начальные условия оо = ео tg(Фо/4), Фо = 120 град;
ео = {-0.165,0.537,0.826}; too = 0, закон цифрового управления uк (ок, гок ) с па- раметрами Tr = 60 Tu , ^ = 0,95, периодом Tu = 0,25 с представлен (5) с учетом алгоритма A и ограничения to™ = 1 град/c, u™ = 0.3 град/с2. Задача состоит в обеспечении совпадения ориентации ССК с ИСК, когда σ = 0 и ω = 0 .
На рис. 3 представлены переходные процессы для компонентов векторов σ , ω и ε ≡ u k , а также для модулей векторов ω и ε (черный цвет). Здесь и далее компоненты векторов всегда отмечаются цветами: синий по оси O x крена, зелёный по оси O y рыскания и красный по оси O z тангажа. Эти результаты демонстрируют, что нелинейная модель (3) с цифровым законом управления u k ( o k , to k ) асимптотически устойчива при ограничениях на модули векторов ω и u k .
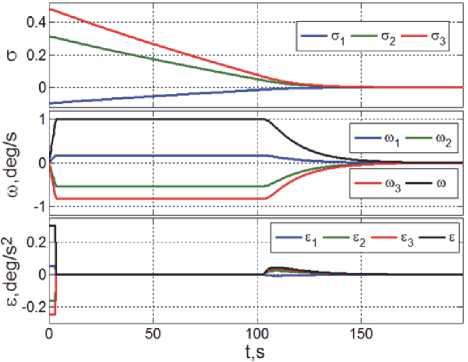
Рис. 3. Изменение векторов о, ю и управления е = uk
АВТОНОМНОЕ НАВЕДЕНИЕ И ЦИФРОВОЕ УПРАВЛЕНИЕ
Автономное наведение и цифровое управление основано на аналитических соотношениях, связывающих требуемые координаты состояния КА с измеренными координатами его углового перемещения. Задача заключается в синтезе законов автономного наведения и управления КА в начальных режимах ориентации, в том числе приведении КА из произвольной ориентации в ИСК к заданной в ОСК, для простоты совпадающей с этой системой координат. В таком случае кватернион Л 0 ( t ) определяет ориентацию ОСК в ИСК и получается закон наведения Л p = Л 0 , to p = to 0 и 8 p = 8 0 . В ОСК O x 0 y 0 z 0 ориентация КА определяется также углами Эйлера-Крылова ф 1 (крена), ф 2 (рыскания) и ф 3 (тангажа) в последовательности 312 элементарных поворотов. Эти углы составляют столбец ф = {ф i } и используются при формировании матрицы C 0 = C е .
Все кинематические параметры ( Л 0 , to 0 ,
-
8 0 ) углового движения ОСК в ИСК формируются непосредственно на борту мини-спутника,
Гт _ ___ _ и при его успокоении в
ИСК и затем с периодом Tu при использовании методов фильтрации, аппроксимации, интерполяции и экстраполяция [1]. С другой стороны, кватернион Λ ориентации КА в ИСК и вектор ω его угловой скорости измеряются БИНС и кластером ДУС, поэтому и возникает возможность автономного наведения [5] и цифрового управления ориентацией мини-спутника в РНО.
Предположим, что КА отделяется от ракеты-носителя в момент времени t 0 = 0 , когда вектор угловой скорости to ( t ) принимает значение to 0 = to ( t 0) с полностью произвольным кватернионом Л 0 = Л ( t 0 ) его ориентации в ИСК. Как подробно описано выше, цифровой вектор ЭММ L r = { l ir } с ограниченными компонентами | l ir | < 1 ™ начинает формироваться автономно, используя измерения магнитометра и кластера ДУС: генерируются значения вектора M m ( t ) = { m m ( t )} V t e [ t r , t r + 1) для замедления вращения КА и режим его успокоения в ИСК заканчивается, когда выполнено условие | to ( t ) | < to , = to ( t ^ ) в некоторый момент времени t 1 ∗ . В тот же момент времени значения Л # 1 = Л ( t*x ) и to j = to ( t*x ) измеряются БИНС, которые далее используются при расчете начальных условий для приведения ориентации ССК к заданной в ОСК.
При t ≥ t 1 ∗ измеряемые Λ k , ω k и формируемые на борту КА переменные Л k , to k 0 , 8 k 0 применяются для расчета значений o k = e k tg( Ф k /4)^ , C k , o k = e k tg( Ф k /4) , to k 3 to k = to k - C k to k и З ф k . Это позволяет вычислить вектор цифрового управления кластером ДМ по соотношению
M k = to k x G 0 + J ( C k 8 0- + [ C k to 0 x ] to k + m k ) , (6) где вектор G k = К k + H k , а вектор m k формируется в соответствии с двумя этапами:
-
1) V t e [ t * , 1 2 * ) пока ф e ( t ) > Ф е2 =Ф e ( 1 2 * ) при заданном значении ф e 2 в некоторый мо *
мент времени t = 1 2 , вектор m k рассчитывается с использованием эталонной модели наведения по ошибке o k вектора МПР как
~е е d е ее d,х е u к = -[ D (° k)(k с° k + b (ak, to к)) + к Юю к ], (7) но с учетом общих ограничений на модули век торов ω и uk в алгоритме A , см. также (5);
-
2) V t > t * стабилизирующий вектор m k формируется так: выполняется фильтрация значений вектора углового рассогласования 8 l = -З ф l , l e N0 с периодом T p и результи-
- рующие векторы εfk, k ∈ N0 используются для вычисления значений вектора m~ k по соотношениям
g,+,= Bg, + Ce^; m, = К(g, + Pe^), (8) k + 1 k k k k k где при du = 2/Tu и a = (duT, —1)/(duT, +1) элементы диагональных матриц B , P и C вычисляются в виде b = (duT2 -1) /(duT2 +1); p = (1 - b)/(1 - a); c ≡ p(b-a) с параметрами τ1 и τ2.
РЕЗУЛЬТАТЫ КОМПЬЮТЕРНОЙ ИМИТАЦИИ
Пусть мини-спутник массой 250 кг при выводе на солнечно-синхронную орбиту высотой 600 км, наклонением 97.787 град и долготой восходящего узла 30 град, пролетая над восходящим узлом орбиты в момент времени t0 = 0 отделяется от ракеты-носителя и начинает кувыркать- ся с модулем вектора угловой скорости ω 0= 3 град/с. Предположим, что МП имеет ограничение lm = 10 А м2 для компонент вектора ЭММ и период Tum = 4 с цифрового управления MП, а в цифровом законе управления uk(σk,ωk) кластером ДМ (6) с периодом Tu = 0.25 с и ограничениями ωm = 1 град/c, um = 0.3 град/c2 коэффициенты kσd и kωd были рассчитаны с параметрами Tr = 60 Tu и ^ = 0.95.
На рис. 4 представлены результаты компьютерной имитации изменения вектора угловой скорости ω ( t ) мини-спутника при цифровом управлении как МП, так и кластером ДМ во всех начальных режимах ориентации. Здесь для заданного значения ω1∗= 0.5 град/с автоматически определяется момент времени t 1∗ = 6336 с завершения режима успокоения КА, а также значения Л . 1 , ® * , o^ = e * 1 tg( Ф ® 1/4) при
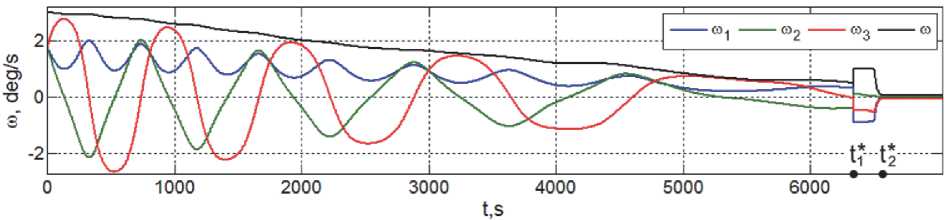
Рис. 4. Изменение вектора угловой скорости при цифровом управлении МП и кластером ДМ
0 1000 2000 3000 4000 5000 6000
t,S
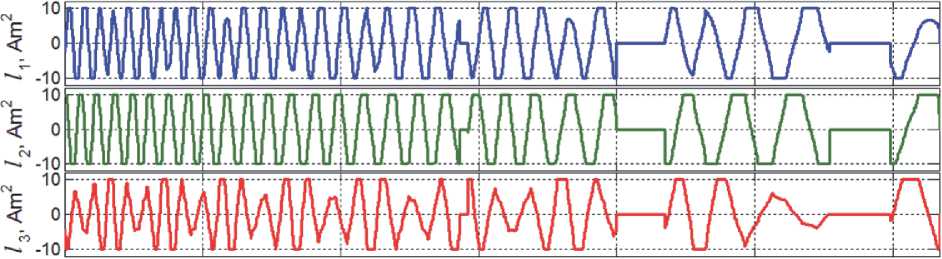
Рис. 5. Изменение вектора электромагнитного момента при цифровом управлении МП в режиме успокоения

О 1000 2000 3000 4000 5000 6000
t,s
Рис. 6. Изменение вектора механического момента при цифровом управлении МП в режиме успокоения
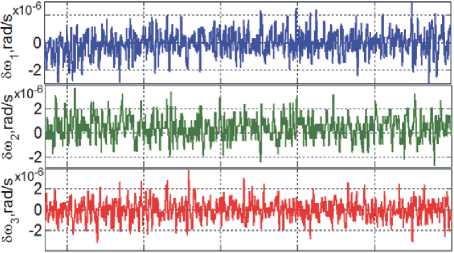
Φ * e 1 = 175.56 град и ω * e 1 = ω *1 - C * e 1 ω * o 1 . Изменения векторов L и M m магнитного привода в этом режиме представлены на рис. 5 и 6. При заданном значении Φ * e 2 = 0.083 град векторный закон m ~ k в (6) переключается от (7) к (8) в момент времени t 2∗ = 6583.6 с. Изменение углов Эйлера-Крылова 5ф 1 (крен, синий цвет), 5ф 2 (ры-скание, зеленый), δφ3 (тангаж, красный) и угол Φ e (черный цвет) собственного поворота КА в ОСК ∀ t ≥ t 1 * = 6336 с представлены на рис. 7, а некоторые детали изменения векторов ω , M r и m в процессе приведения ориентации КА в ОСК – на рис. 8, 9 и 10. Наконец, на рис. 11 и 12 приведены ошибки по угловым скоростям δω i и углам δφ i при переходе СУО в установивший режим угловой стабилизации мини-спутника в орбитальной системе координат.
Здесь были учтены все шумы измерений и возмущающие моменты, тщательная дискрет- ная фильтрация измерений и выбор параметров в автономных цифровых законах управления позволили добиться хороших результатов по точности СУО мини-спутника в начальных режимах его ориентации.
ПРОВЕРКА РАБОТОСПОСОБНОСТИСИСТЕМЫ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ
Проверка работоспособности СУО в режимах начальной ориентации является весьма ответственной, здесь требуется особая тщательность при определении работоспособности кластера ДМ. В случае отказа необходимо провести быструю диагностику с определением конкретного отказавшего двигателя-маховика.
Алгоритм бортовой диагностики состояния СУО использует её эталонную модель для имитации номинального управления движением КА в реальном времени. Здесь для обнаружения аномальной ситуации на каждом контрольном
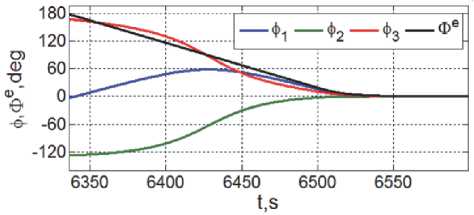
Рис. 7. Углы Эйлера-Крылова и угол вращения КА в ОСК
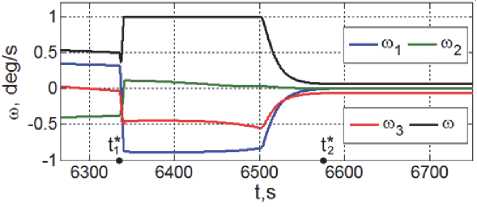
Рис. 8. Изменение вектора ю при приведении КА к ОСК
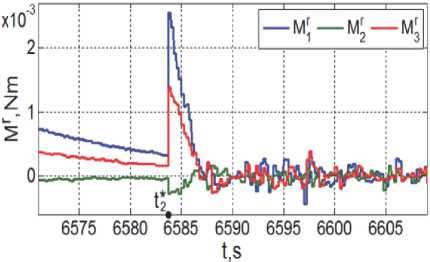
Рис. 9. Изменение вектора моментов кластера ДМ
6800 6900 7000 7100 7200
t,s
Рис. 11. Изменение вектора Зю в режиме стабилизации КА
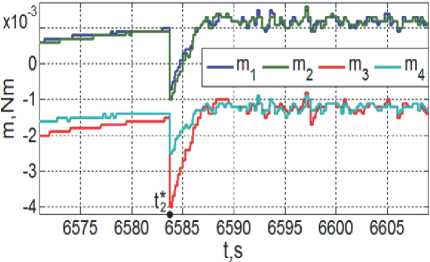
Рис. 10. Изменение управляющих моментов четырёх ДМ
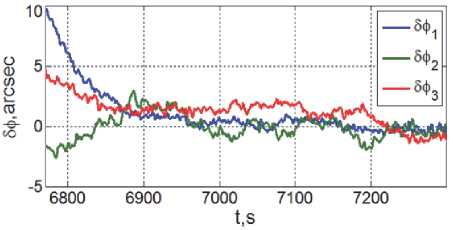
Рис. 12. Изменение вектора Зф в режиме стабилизации КА
периоде вычисляется вектор рассогласований e = { e i } = x — x между векторами измеренных x = { x, } и моделируемых x = { x i } координат.
Применяемый подход к диагностике СУО и принятию решения о неисправности заключается в следующем. Изменение во времени диагностических параметров e j ( t ) с индексом отказа j = 1,2 можно рассматривать как случайный процесс, характеристики которого зависят от множества факторов. Поэтому классификацию нужно вести не по детерминированным мгновенным значениям рассогласований e j ( t ) в конце каждого контрольного периода Tu , а как случайный процесс, представленный дискретной последовательностью значений e j k = e j ( t k ) , t k + 1 = t k + T u для скользящего окна таких измерений. Классификация отказов с использованием обработки данных случайного процесса в таком окне реализована в нашей модификации [8] алгоритма последовательного контроля отношения вероятностей (ПКОВ, A. Wald , 1954), детали представлены также в [9].
ЗАКЛЮЧЕНИЕ
Для приведения ориентации космического аппарата от произвольной к требуемой используется автономное угловое наведение и модульно ограниченное векторное цифровое управление с применением вектора модифицированных параметров Родрига. Автономные векторные цифровые законы управления магнитным приводом и минимально избыточным кластером двигателей-маховиков применяются соответственно для успокоения кувыркающегося мини-спутника после его отделения от ракеты-носителя и приведения его ориентации в заданное положение в орбитальной системе координат без какой-либо реактивной двигательной установки.
Основными достижениями работы являются: (i) автономное векторное цифровое управление минимально-избыточным кластером двигателей-маховиков при явном распределении вектора управляющего момента между маховиками с учетом ограниченных ресурсов кластера по векторам управляющего момента и кинетического момента; (ii) разгрузка кластера двигателей-маховиков от накопленного кинетического момента при помощи магнитного привода с цифровым управлением по оригинальной схеме компенсации; (iii) встроенная дискретная идентификация и цифровая компенсация момента сил сухого трения на оси вращения каждого маховика.
Представлены разработанные методы и алгоритмы автономного наведения и цифрового управления мини-спутником землеобзора в на- чальных режимах ориентации, а также результаты компьютерной имитации с учетом всех шумов измерений и возмущающих моментов. Эти результаты продемонстрировали хорошую точность системы ориентации мини-спутника, достигаемую тщательной дискретной фильтрацией измерений и выбором параметров в простых цифровых законах управления. Кратко рассмотрена проблема проверки работоспособности системы ориентации мини-спутника и представлены разработанные дискретные алгоритмы бортовой диагностики и классификации отказов, основанные на компьютерной обработке доступных измерений и явных соотношениях.
Разработанные алгоритмы автономного наведения, цифрового управления и мониторинга состояния миниатюрных геодезических спутников просты, надежны и реализуемы в космической технике [1].
Список литературы Автономное цифровое управление мини-спутником землеобзора в режимах начальной ориентации
- Testoyedov N., Rayevsky V., Somov Ye., Titov G., Yakimov Ye. Attitude and orbit control systems of Russian com-munication, navigation and geodesic satellites: History, present and future // IFAC- PapersOnLine. 2017, vol. 50, no. 1, pp. 6422-6427.
- Somov Ye., Butyrin S., Somov S., Somova T. Control of robot- manipulator during its preparation and capture of a passive satellite // Mathematics in Engineering, Science and Aerospace, 2019, vol. 10, no. 3, pp. 421-432.
- Somov Ye., Starinova O., Butyrin S. Pulse-width control of electro-reaction engines for a station-keeping of a land-survey satellite on sun-synchronous orbit // Procedia Engineering, 2017; vol. 185, pp. 267-274.
- Somova T. Satellite attitude guidance and economical digital control during initial modes // Mathematics in Engineer-ing, Science and Aerospace. 2018, vol. 9, no. 3, pp. 365-372.
- Сомов Е.И., Бутырин С.А., Сомова Т.Е. Автономное наведение и управление ориентацией космического ап-парата в режиме слежения // Известия Самарского научного центра Российской академии наук. 2019. Т. 21. № 5. С. 96-107.
- Somova T. Attitude guidance and control, simulation and animation of a land-survey mini-satellite motion // Journal of Aeronautics and Space Technologies. 2016. Vol. 9, no. 2, pp. 35-45.
- Somov Ye. Feedback linearization and VLF techniques on the synthesis of spacecraft's gyromoment attitude control systems // Proceedings of 1996 IEEE International Conference on Systems, Man and Cybernetics. Information Intelligence and Systems. Beijing. 1996, vol. 4, pp. 2522-2527.
- Somov Ye., Rodnishchev N., Somova T. Health checking of a spacecraft control system in the orientation initial modes // Proceedings of 2019 IEEE International Workshop on Metrology for Aerospace; Turin.2019, pp. 619-623.
- Somov Ye., Rodnishchev N. Active fault tolerant gyromoment control of information satellites and free-flying robots // Proceedings of 2018 IEEE International Workshop on Metrology for Aerospace, Rome. 2018, p. 166-170.
