Байесовский подход к наибыстрейшему обнаружению разладки в частично наблюдаемых марковских случайных процессах

Автор: Спивак В.С., Тартаковский А.Г.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Информатика и управление
Статья в выпуске: 2 (50) т.13, 2021 года.
Бесплатный доступ
Частично наблюдаемые марковские случайные процессы, которые часто называют скрытыми марковскими, составляют класс случайных процессов, которые часто используются в различных практических задачах. В данной работе исследуется эффективность наиболее популярных наибыстрейших алгоритмов обнаружения разладки в скрытых марковских моделях в байесовской постановке. Мы сравниваем рабочие характеристики процедур Ширяева, Ширяева-Робертса и кумулятивных сумм (КУСУМ). Критерием эффективности служит минимизация задержки обнаружения при ограниченной вероятности ложной тревоги. Наилучшие характеристики, как и ожидалось, демонстрирует процедура Ширяева. Лишь незначительно хуже характеристики демонстрирует процедура Ширяева-Робертса. Наиболее часто использующаяся на практике процедура КУСУМ показывает рабочие характеристики заметно хуже других предложенных процедур.
Обнаружение момента разладки, скрытая марковская модель, процедура ширяева, процедура ширяева-робертса, процедура кусум, прекращение сопровождения цели
Короткий адрес: https://sciup.org/142231000
IDR: 142231000 | УДК: 519.216.5 | DOI: 10.53815/20726759_2021_13_2_161
Bayesian quickest changepoint detection approach to partially observe Markov processes
Partially observed Markov processes or the so-called hidden Markov models constitute a class of stochastic processes that are very often used in a variety of practical problems. In this paper, we investigate the efficiency of the most popular quickest changepoint detection algorithms in hidden Markov models of the Bayesian approach.We compare the performance of the Shiryaev, Shiryaev-Roberts, and CUSUM procedures. The efficiency criterion is to minimize the average delay to detection subject to a constraint on the probability of false alarms. The Shiryaev procedure performs the best operating characteristics (as expected). The Shiryaev-Roberts procedure performs only slightly worse operating characteristics. The most popular in practice CUSUM procedure performs significantly worse than other procedures.
Текст научной статьи Байесовский подход к наибыстрейшему обнаружению разладки в частично наблюдаемых марковских случайных процессах
Мы рассматриваем задачу обнаружения разладки, в которой в качестве модели эволюции процесса, во времени используется скрытая марковская модель (далее СММ). СММ
представляет собой частично наблюдаемый марковский процесс, состоящий из: 1) дискретного во времени скрытого от наблюдателя марковского случайного процесса, задающего пространство состояний системы S" = [Si,..., S" с начальным состоянием So, и из 2) дискретного во времени наблюдаемого случайного процесса УД = [Yi,..., У"], предоставляющего косвенную информацию о состоянии системы [1].
Математически СММ описывается следующим образом: задаются
-
1) конечное (ф-мерное пространство состояний, из которого задается состояние {0,... ,d — 1}, начальное состояние So инициализируется с помощью следующей функции вероятности:
Р (So = so) = tt(s o );
-
2) матрица вероятностей перехода (параметризованная 0) между состояниями из sn-i в s„:
Р S — sn|Sn-1 — sn— 1) — рӨ (Sn-i, S"), п — 1, 2, . . . , (1)
-
3) условная функция плотности (параметризованная 0), характеризующая наблюдаемый процесс У в каждый момент времени п в зависимости от состояния системы:
У" - Jө (Y„|y„-i,s„), п = 1,2,...
Разладка — изменение вероятностного закона, описывающего СММ, происходит в неизвестный момент времени /. Матрица вероятностей перехода (1) и модель наблюдения (2) претерпевают изменение (из 0о в 01) в момент разладки /. В последовательной постановке, пока поведение наблюдений согласуется с нормальным состоянием, следует продолжать процесс. Если поведение наблюдений изменяется, то нужно как можно скорее обнаружить это изменение (разладку). На рис. 1 приведен пример наблюдения, удовлетворяющего СММ, а на рис. 2 — пример обнаружения разладки в нем.
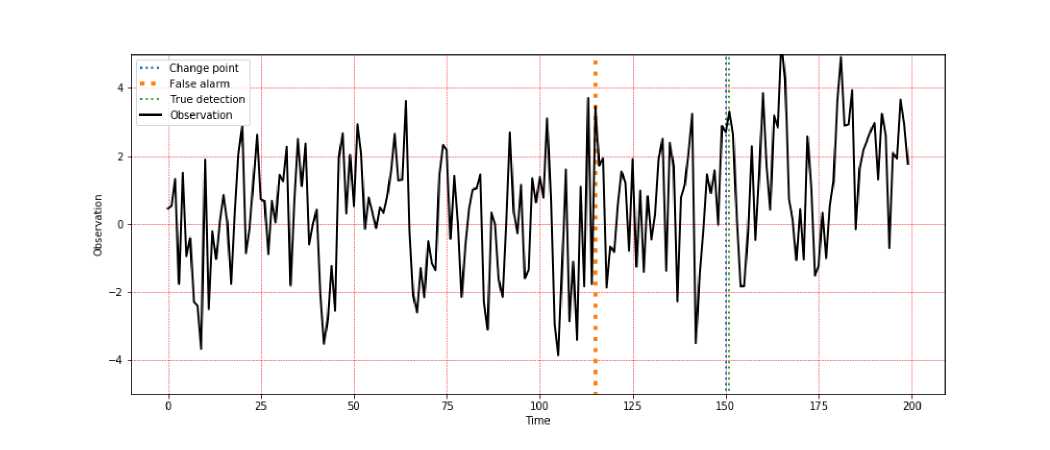
Рис. 1. Пример наблюдаемого процесса.
В данной работе мы рассматриваем байесовскую постановку задачи (раздел 2). Для неё мы изучаем и сравниваем рабочие характеристики трех наиболее популярных наибыстрейших правил обнаружения разладки (раздел 3): процедура. Ширяева, процедура. Ширяева-Робертса, процедура. Кумулятивных Сумм (КУСУМ). Процедура. Ширяева, оптимальна, в случае независимых и одинаково распределенных наблюдений в байесовской постановке, в которой момент изменения — случайная величина, из геометрического распределения [2]. Поскольку процедура Ширяева плохо применима на практике, интересно изучить, насколько хуже рабочие характеристики имеют процедуры Ширяева-Робертса, и КУСУМ, которые не используют априорное распределение момента разладки. Исследование проводится для двух моделей: СММ с Гауссовским наблюдением (раздел 4) и СММ, описывающая задачу прекращения сопровождения цели (раздел 5). В разделе б представлены выводы по проделанной работе.
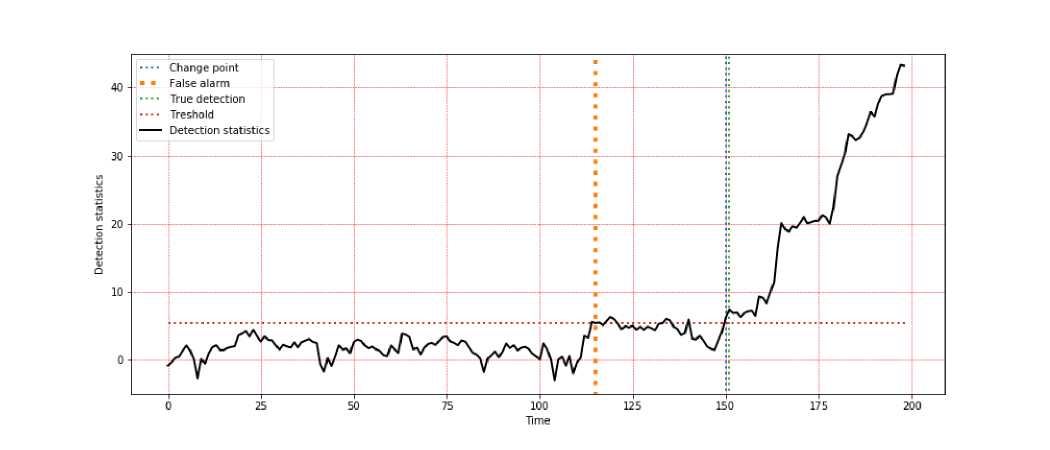
Рис. 2. Пример обнаружения разладки в наблюдаемом процессе
2. Байесовская постановка
Рассмотрим байесовскую постановку, в которой момент разладки и — случайная величина, не зависящая от наблюдений. Мы считаем, что распределение вероятностей Р(и = к) = Тк, к = 0,1, 2,..., является геометрическим:
Р(и = к) = р(1 — р)к, к = 0,1, 2,...,
где 0 < р < 1.
Любая последовательная процедура обнаружения разладки — это правило, останавливающее наблюдаемый процесс {Xn}nEz + в момент времени Т. Ложная тревога происходит, когда Т 6 и.
Обозначим Рк вероятность, когда разладка происходит в момент времени и = к Е Z + , Z = {0,1,...}, Ек — соответствующее математическое ожидание Р-(•) = ЕГ=оГ^Рк(•), Е- — математическое ожидание по мере Р-.
Из [3] в байесовской постановке риск, связанный с ложным срабатыванием, обычно измеряется как взвешенная вероятность ложной тревоги (probability of false alarm — PEA):
∞
РҒА(Т ) = Р- (Т 6 и) = £ гкР^(Т 6 к). (4)
к =1
В свою очередь риск, связанный с задержкой в обнаружении, обычно измеряется как средняя задержка обнаружения (average detection delay — ADD):
∞
^гк Ек[Т — к|Т > к]Р^(Т > к)
АПП(Т ) = Е-[Т — и |Т > и ]
к =0 _______________________________
1 — РҒА(Т )
Мы рассматриваем класс процедур обнаружения Ca = {Т : РҒА(Т ) 6 а}. Вероятность ложной тревоги ограничена а, 0 < а < 1. Цель байесовской постановки задачи — найти оптимальную процедуру, которая минимизирует в классе Ca среднюю задержку обнаружения.
-
3. Процедуры обнаружения разладки
-
3.1. Процедура Ширяева
Пусть «Нк : ? = к» и «Н^ : ? = то» — гипотезы, что разладка в наблюдении происходит в момент времени 0 6 к < то, и что разладка не происходит никогда, соответственно. Отношение правдоподобия между этими гипотезами:
n= Р (ЭДН)
к Р :у- Н . , •
Из [4] статистика процедуры Ширяева, в которой используется параметр априорного распределения (3) момента разладки р, определяется как
V11 к- 1 -n Р ) -V^fi А- - -пПпп
Rn,P 1 -р) р (У„|н ) - р) L . (а)
к =і v 11 х к =і
Процедура Ширяева оптимальна в случае независимых и одинаково распределенных наблюдений в байесовской постановке с геометрическим распределением момента изменения в наблюдениях. Если отношение правдоподобия не зависит от момента разладки к, что всегда верно в случае независимых и одинаково распределенных наблюдений и часто для марковских и скрытых марковских моделей [4], т.е. (6) сводится к Ln = Р0(УГ|У1п-1)/Рго(УГ|У1п-1), статистика Rn,p удовлетворяет рекурсии
ℒ
Rn,p = (1 + Rn- 1 ,p )"1 -----■ л > 1, R o ,p = 0. (8)
1 — Р
Процедура Ширяева относительно порога А определяется как
ТА = inf {л > 1 : Rn,p > А} , А > 0. (9)
-
3.2. Процедура Ширяева-Робертса
Из [4] статистика процедуры Ширяева-Робертса Rn определяется как
п
Р V Нк
Р ( Ап' Н . ,.
(Ю)
R. = С к=
Если £п не зависит от момента разладки к, тогда из [4] статистика процедуры Ширяева-Робертса удовлетворяет рекурсии
Rn = (1 + Rn-i )£п, л > 1, Ro = 0.
(И)
Процедура Ширяева-Робертса относительно порога В определяется как
Тв = inf {л > 1 : Rn > В} , В > 0.
3.3. Процедура КУСУМ
4. СММ с Гауссовским наблюдением
Из [4] статистика КУСУМ Vn = eWn в экспоненциальной форме определяется как С -max 11 max 1 АД1НЕ 11 ,
V„ =max^, max, y(y„|H^)j )■ и если Ln не зависит от момента разладки к, то из [4] статистика КУСУМ удовлетворяет рекурсии
Vn = max {1,Рп-1 }Lni л > 1, Vo = 1. (14)
Процедура КУСУМ относительно порога С определяется как
Тс = inf {л > 1 : Vn >С } , С > 0.
Мы рассматриваем задачу, в которой текущий наблюдаемый сигнал и последующее состояние зависят от текущего состояния (пусть (d = 2)-мерное пространство состояний). Тогда матрицы перехода (1) из предыдущего состояния в текущее Рө0 (Sn = sn|Sn-1 = sn-1) и рд 1 (Sn = sn|Sn-1 = sn-1) — до и после разладки соответственно
, х /1 - аө 0 аө 0 \ , х /1 - аө 1 аө 1 \
Р Ө0 V Зө , 1 - Зө ,) ’ РӨ1 (•’•) V Зө і 1 - Зө і) '
Если ? — момент разладки, модель наблюдений (2) /ө0(Y^-1 ls^-1) и /ө1 (Yls^) — модель наблюдений до разладки и после разладки соответственно.
Используя правило Байеса и то, что Р (Y1| Yi-1, H^) = Р (Y11 Yi-1, Н») для 1 < I < к — 1, получаем из (6) отношение правдоподобия (£П):
п
^=п i=1
Р (Y1 |YI-1, Щ) Р (Г |YI-1, Н»)
п Р (Y1|Y11-1, Н) i=1 Р (Y1|Y11-1, н » ) ■
Пусть г1» = Р(Si = г|Г/ 1, Н»), г = 0,1. Непосредственное вычисление для Р (Yi|Yi-1, Н » дает
Р(Yi|Y11-1, Н») = » fөo(YilSi = 0) + г^/ө,(YilSi = 1), I = 1,2,...(17)
Тогда ri » удовлетворяет следующей рекурсии:
, = Рө, (O,i)r0_1.»/<0 (Yf-1|Sf-1 =0)+ Рө, (СОЩ,»./», (Yi-1 |Si-1 = 1)
r‘" г0-1,„/өо (Yi-1|Se-1 = 0) + г1-1,„/ө0 (Y,-1|S,-1 = 1) ,(1S> r0,» = Р (S0 = г)=^ө,(г), г = 0, 1.
ПУСТЬ ri,i = Р (Si = ^|Y1i 1, Н1), тогда, обобщая (17) для Н^, получаем выражение для Р (Y1IY/-1, Н):
Р(Yi|Y1i-1, Н1) = г0°1 fөa(YilSi = 0) + rXkfөa(YilSi = 1), I > к.(19)
Рекурсия для ri к имеет вид
Рөа(0,г)ге- 1 ,к fөb ( y i - 1 | s i - 1 = 0) + Рөа (M)rL1,fc /өь ( y i - 1 | s i - 1 = 1)
30-11 fөb (Yi-1lSi-1 = 0) + r1-1i fөb (Yi-1lSi-1 = 1) ,(20)
r0,i = Р (S0 = г)=^ө,(г), г = 0,1
где
{ 0, если I < к
1, если I > к ’
6={
0,
1,
если I < к если I > к
Вычисляя из рекурсий (18) и (20) ri» и ri к, мы получаем Р (YilY ^ 1, Н») и Р (Yi|Y1i-1, Н1) из (17) и (19) соответственно. Затем, подставляя полученные значения в (16), получаем отношение правдоподобия £к, которое используется при вычислении статистик для процедур обнаружения разладки Ширяева, Ширяева-Робертса, КУСУМ (7),
(Ю), (13).
4.1. Численное сравнение алгоритмов обнаружения разладки
Для вычисления рабочих характеристик рассматриваемых процедур обнаружения используем метод Монте-Карло. Для каждого прогона Монте-Карло моделируем СММ: последовательность состояний {Snj)}, п > 1 (j = 1,..., N, N — число прогонов Монте-Карло), используя модель Бернулли, и соответствующую ей последовательность наблюдений {У^')}. Также мы генерируем случайный момент разладки v j согласно геометрическому распределению (3). В каждом прогоне Монте-Карло мы получаем, согласно (9), (12), (15), время остановки Т А\ тВ\ Т ( ' ) , j = 1,...,N для процедур Ширяева, Ширяева-Робертса и КУСУМ соответственно. Прогоны Монте-Карло, которые приводят к ложным срабатываниям, т.е. Т (j)< Vj, используются для вычисления экспериментальных оценок Монте-Карло вероятности ложной тревоги PFA (4):
1 N ^Ғ1
-
( а) = N У},
j=i
-
1 N
- АТв) = N У H(ro><„jl,(21)
j=1
-
1 N
- 1
-
( c) = N У}.
j=i
Тогда экспериментальная оценка Монте-Карло средней задержки обнаружения ADD (5)
1 N1
А\(Та ) = — У (т ( ' - V. ) 1Шук г---
А N j=y а j) №>„б } 1 - рға ( т а )
АПП ( Тв ) = — У ^Т(j) - V,-) ----
В N j=A в jV {т^ } 1 - рҒА(Тв )
1 N 1
АБЬ(ТС ) = — У (т - v,-) ---
N j-Л c jV № >^з } 1 - рҒА(Тс )
Параметры моделирования
-
1) Параметры СММ: ае0 = 0.2, ае 1 = 0.35, ^е0 = 0.5, рӨ1 = 0.4,
( V(1,1) если S
До разладки : Yn = <
V (-2,1) если S,
После разладки
JV(2.5,1) если Sn = 0
V(-0.5,1) если Sn = 1.
Эта разница тем меньше, чем меньше р. Наиболее популярная на практике процедура КУСУМ имеет хуже характеристики, чем процедуры Ширяева и Ширяева-Робертса. Этот проигрыш уменьшается с уменьшением р, но все равно остается заметным.
Таблица!
Рабочие характеристики алгоритмов обнаружения
|
р |
a |
adXt a ) |
ADD(TB ) |
ADD(TC ) |
PFA ( T a ) |
PFA(TB ) |
PFA ( T c ) |
|
0.5 |
0.2 |
0.64 |
0.67 |
0.81 |
0.177 |
0.178 |
0.184 |
|
0.5 |
0.15 |
0.80 |
0.89 |
1.12 |
0.139 |
0.131 |
0.133 |
|
0.5 |
0.1 |
1.09 |
1.12 |
1.50 |
0.095 |
0.087 |
0.094 |
|
0.5 |
0.05 |
1.28 |
1.34 |
1.71 |
0.074 |
0.072 |
0.075 |
|
0.5 |
0.01 |
2.98 |
3.23 |
4.05 |
0.009 |
0.009 |
0.0087 |
|
0.1 |
0.2 |
2.83 |
2.91 |
3.04 |
0.183 |
0.190 |
0.207 |
|
0.1 |
0.15 |
3.28 |
3.35 |
3.50 |
0.139 |
0.143 |
0.151 |
|
0.1 |
0.1 |
3.77 |
3.90 |
4.07 |
0.094 |
0.92 |
0.103 |
|
0.1 |
0.075 |
4.35 |
4.41 |
4.58 |
0.074 |
0.071 |
0.75 |
|
0.1 |
0.01 |
7.80 |
7.89 |
8.09 |
0.0095 |
0.0105 |
0.0098 |
|
0.01 |
0.2 |
7.21 |
7.71 |
8.02 |
0.201 |
0.188 |
0.204 |
|
0.01 |
0.15 |
7.76 |
8.28 |
8.54 |
0.148 |
0.118 |
0.120 |
|
0.01 |
0.1 |
8.52 |
8.81 |
8.96 |
0.094 |
0.099 |
0.097 |
|
0.01 |
0.075 |
9.36 |
9.66 |
9.85 |
0.074 |
0.062 |
0.080 |
|
0.01 |
0.01 |
13.54 |
13.77 |
13.98 |
0.0095 |
0.0088 |
0.0101 |
5. Задача прекращения сопровождения цели
Для иллюстрации практической применимости СММ рассмотрим задачу прекращения сопровождения цели в активных сонарных системах [6]. Из-за постоянно меняющихся подводных условий, в частности, геометрических, географических эффектов, реверберации, отношение сигнал-шум (SNR) может существенно изменяться. Из-за этого производительность датчика при каждом последовательном сканировании может резко меняться: между низким и высоким уровнем обнаружения на каждом сканировании. Чтобы решить эту проблему, разумно использовать СММ. Марковская цепочка (скрытая от наблюдателя компонента) состоит из двух возможных состояний, соответствующих высокой и низкой вероятности обнаружения. Наблюдаемая компонента — последовательность сканов, на каждом из которых цель присутствует или нет. Вероятность обнаружения цели на каждом последовательном скане зависит от состояния обнаружения (скрытой компоненты). Таким образом, задача прекращения сопровождения цели в активных сонарных системах может быть рассмотрена как задача наибыстрейшего обнаружения разладки с СММ: если разладка не произошла (цель присутствует в наблюдаемой зоне), следует продолжать наблюдение и сопровождение цели, но, если разладка произошла (цели в наблюдаемой зоне больше нет), необходимо это обнаружить как можно скорее и прекратить наблюдение и сопровождение.
Обозначим {Xn} скрытую марковскую компоненту. Тогда Xn = 1 соответствует состоянию с высокой вероятностью обнаружения сонаром (SNR большое), и Xn = 2 соответствует состоянию с низкой вероятностью обнаружения сонаром (SNR низкое). Таким образом, Xn Е {1, 2} — скрытая Маркове кая цепочка. Пусть Pj — вероятность перехода между состояниями, где j = той j = 0 задают вероятность перехода до и после разладки соответственно. Тогда Pj(Xn = 1|Xn-i = 2) = pj (2,1) = р, n > 1 — вероятность перехода из состояния с низким SNR в состояния с большим SNR, и Pj(Xn = 2|Xn-i = 1) = pj (1, 2) = q, n > 1 — вероятность перехода из состояния с большим SNR в состояния с низким SNR. Начальное состояние Xo определяется из распределения Pj (Xo = 1) = 7Tj (1) = р/(р + q) для j = той j = 0.
Согласно гипотезе до разладки H^ : v = то, условная плотиость наблюдений Y р(Үп|ҮП-1,Хп = I, H^) = ді(Үп), I = 1, 2, n > 1, и согласно гипотезе Hk : v = к, наблюдения после разладки Yk, Yk+1,••• являются независимыми и одинаково распределенными с плотностью /(у).
Таким образом, совместная плотность до разладки вектора ҮП:
п
P V П Р~(ЭД-1).(23)
i =1
Совместная плотность вектора ҮП, при условии, что v = к < n:
к-1п
Рк (Y^ = П Р-(Үг|Үг-1) х П (Үк).( i=1
Таким образом, используя (23) и (24), преобразуем отношение правдоподобия (6):
7 = / ү ;_ ү ү П-1).
Так как отношение правдоподобия в данном случае не зависит от момента разладки v, то для подсчета статистик процедур обнаружения мы будем использовать формулы (8), (И), (14).
В (23) p^(y|YJ-1) есть не что иное, как
■.№іү г-1)= е 9i(Yi)p (х = i i y г-1), г > 1,
1=1
где Р(Хг = 1|үі 1) = Рг|г—1(1) — апостериорная вероятность, и она может быть посчитана как
Pi|i-1(2) = Рг-1(2)(1 - р) + Pi- 1 (1)q, РгМ(1) = Рг-1(1)(1 - q) + Рг-1(2)р, (27)
где Рг(1) := Р (Хг = l| Yi) — апостериорная вероятность, которая, согласно формуле Байеса, получается
Р = ді(Үі)Рі|і-1(1)
i( ) Е2=1 дв^Рц-М .
Как описано выше, наблюдение {Үг} — последовательность обнаружений цели на каждом скане. Если цель обнаружена на n-м скане, то Үп = 1, но если цель не обнаружена на n-м скане, то Yn = 0. При моделировании мы используем схему Бернулли, в которой успех (Үп = 1) задается вероятностями обнаружения при однократном сканировании РД и РД для большого и низкого SNR соответственно. Тогда ді(Үп) = (Р^ү" (1 Р' -', I = 1, 2; /(Үп) = (Р/а)у- (1 - Pfa)1-Y", (29)
где Р 1 Рд, и Р^а удовлетворяют неравенствам РД > РД > Р$а.
Используя формулы (26), (27), (28), (29), получаем отношение правдоподобия (25), которое используется при вычислении статистик для процедур обнаружения разладки Ширяева, Ширяева-Робертса, КУСУМ (8), (И), (14).
5.1. Численное сравнение алгоритмов обнаружения разладки
Моделируем стохастическую модель: ({Хп}, {Іф}щ/), используя генератор случайных чисел. Для каждого прогона Монте-Карло получаем, согласно (9), (12), (15), время остановки Т/. тВ\ Т^), z = 1,... ,N. Вычисляем ADD и PFA аналогично (22) и (21).
Параметры моделирования
1) Параметры СММ: р = 1/30, q = 1/10, Pi = 0.9, Pi = 0.1, Pfa = 0.1.
2) Параметр геометрического распределения: р = 0.5; 0.1; 0.01.
3) Заданный уровень, ограничивающий PFA: a = 10-1; 10-2; 10—3; 10-4.
4) Порог для процедуры Ширяева выбирается как А = (1 — a)/a, а для процедур Ширяева-Робертса л КУСУМ - В = (1 — р)/(ра).
6. Заключение
Результаты моделирования.
Результаты моделирования представлены в табл. 2. Как и для модели из раздела 4, процедура Ширяева-Робертса лишь незначительно уступает процедуре Ширяева, при р ^ 0 разница становится совсем незаметной. В свою очередь популярная процедура КУСУМ для данной модели имеет весьма низкие рабочие характеристики, заметно уступая и процедуре Ширяева, и процедуре Ширяева-Робертса.
Т а б л и ц а 2
Рабочие характеристики алгоритмов обнаружения
|
Pfa = 0.1,р = 1/30,q = 1/10, Pi =0.9, Pi = 0.1 |
|||||||
|
р |
a |
ADD ( T a ) |
AdD(T b ) |
AdD(t c ) |
PfA ( T a ) |
PfA ( t b ) |
PfA ( t c ) |
|
0.5 |
0.1 |
1.533 |
1.764 |
4.745 |
0.09145 |
0.08647 |
0.09155 |
|
0.5 |
0.01 |
4.320 |
5.137 |
31.164 |
0.00981 |
0.00983 |
0.00997 |
|
0.5 |
0.001 |
7.647 |
8.8643 |
49.070 |
0.000906 |
0.000904 |
0.00092 |
|
0.5 |
0.0001 |
10.721 |
11.955 |
54.379 |
0.000098 |
0.000092 |
0.000093 |
|
0.1 |
0.1 |
12.177 |
12.237 |
40.339 |
0.09325 |
0.09276 |
0.09025 |
|
0.1 |
0.01 |
28.486 |
28.818 |
55.942 |
0.009334 |
0.009106 |
0.009366 |
|
0.1 |
0.001 |
45.466 |
46.187 |
75.039 |
0.000962 |
0.000932 |
0.000903 |
|
0.1 |
0.0001 |
63.546 |
63.617 |
94.514 |
0.000092 |
0.000092 |
0.000086 |
|
0.01 |
0.1 |
70.381 |
70.519 |
77.805 |
0.09795 |
0.097176 |
0.09858 |
|
0.01 |
0.01 |
134.448 |
134.672 |
141.706 |
0.009812 |
0.00999 |
0.00994 |
|
0.01 |
0.001 |
199.416 |
200.332 |
206.377 |
0.00097 |
0.00096 |
0.00099 |
|
0.01 |
0.0001 |
264.739 |
266.71 |
269.840 |
0.000098 |
0.000097 |
0.000090 |
|
0.001 |
0.1 |
166.184 |
166.280 |
170.473 |
0.09861 |
0.0979 |
0.09992 |
|
0.001 |
0.01 |
256.426 |
258.430 |
260.535 |
0.009866 |
0.00956 |
0.009801 |
|
0.001 |
0.001 |
344.781 |
344.810 |
349.665 |
0.0009866 |
0.00094 |
0.00090 |
|
0.001 |
0.0001 |
432.422 |
432.572 |
436.921 |
0.000098 |
0.000098 |
0.000096 |
Было проведено исследование рабочих характеристик наиболее популярных наибыстрейших процедур обнаружения разладки Ширяева, Ширяева-Робертса, КУСУМ. Критерием эффективности для их сравнения служила средняя задержка обнаружения ADD при ограниченной вероятности ложной тревоги PFA. В качестве модели наблюдения использовались две различные скрытые марковские модели. В результате моделирования получено, что для обеих моделей процедура Ширяева имеет наилучшие рабочие характеристики. Однако процедура Ширяева-Робертса, не использующая, в отличие от процедуры Ширяева, априорное распределение момента разладки, имеет рабочие характеристики лишь незначительно хуже, чем процедура Ширяева. Эта разница уменьшается при р ^ 0. В свою очередь наиболее популярная процедура КУСУМ уступает обеим процедурам (в первой модели незначительно, но во второй существенно). Исходя из полученных результатов, мы рекомендуем использовать процедуру Ширяева-Робертса в практических задачах по обнаружению разладки в скрытых марковских моделях. Результаты исследования очень полезны и для большинства других приложений.
Работа была поддержана грантом Россиского Научного Фонда 18-19-00452 в МФТИ.
Список литературы Байесовский подход к наибыстрейшему обнаружению разладки в частично наблюдаемых марковских случайных процессах
- Rabiner L.R. A tutorial on hidden Markov models and selected applications in speech recognition // Proceedings of the IEEE. 1989. V. 77, N 2. P. 257-286.
- Shiryaev A.N. On optimum methods in quickest detection problems // Theory Prob. Appl. 1963. V. 8, N 1. P. 22-46.
- Tartakovsky A.G. On asymptotic optimality in sequential changepoint detection: Non-idd case // IEEE Transactions on Information Theory. October 2015.
- Tartakovsky A.G., Nikiforov I.V., Bassevile M. Sequential Analisis Hypothesis Testing and Changepoint Detection. Ser. Monographs on Statistics and Applied Probability. Boca Raton-London-New York: Chapman and Hall/CRC Press, 2014.
- Tartakovsky A.G., Moustakides G.V. On Asymptotic Optimality in Sequential Changepoint Detection: Non-iid Case // IEEE Transactions on Information Theory. October 2015.
- Blanding W.R., Willet P.K., Bar-Shalom Y. Multisensor track management for targets with fluctuating SNR // IEEE Trans. on Aerospace and Electronic Systems. 2009. V. 45, N 4. P. 1275-1292.
