Баллистико-навигационное обеспечение полёта космических аппаратов «Ямал-200»

Автор: Улыбышев Юрий Петрович, Соколов Андрей Васильевич, Гунченко Михаил Юрьевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 4 (43), 2023 года.
Бесплатный доступ
В статье изложен опыт РКК «Энергия» по практическому созданию системы баллистико-навигационного обеспечения (БНО) полёта геостационарных спутников связи серии «Ямал-200». Кратко представлены основные задачи БНО, особенности космических аппаратов «Ямал-200», архитектура разработанного прикладного программного обеспечения. Описываются этапы отработки БНО, способы его взаимодействия с другими сегментами центра управления полётом, приводятся результаты оперативного БНО при подготовке к запуску космических аппаратов, выведении, их установке в рабочую точку и при полёте в ней.
Спутники «ямал-200», баллистико-навигационное обеспечение, геостационарный спутник
Короткий адрес: https://sciup.org/143181063
IDR: 143181063 | УДК: 629.783
Ballistic-navigation support of the Yamal-200 flight
RSC Energia experience for practical development of the Flight Dynamic System (FDS) for the Mission Control Centre (MCC) of Yamal-200 series geostationary spacecraft is presented. Main problems of FDS, major features of the Yamal-200, FDS software architecture are briefly described. FDS development phases, its interrelation with other MCC systems, results of practical use of FDS during spacecraft processing, launch to orbit, moving and station-keeping at working point are proposed.
Текст научной статьи Баллистико-навигационное обеспечение полёта космических аппаратов «Ямал-200»
В 2003 г. РКК «Энергия» завершила разработку и осуществила запуск двух усовершенствованных геостационарных спутников связи второй серии «Ямал-200» в дополнение к функционирующему с 6 сентября 1999 г. геостационарному спутнику связи «Ямал-100». Запуск был осуществлен 24 ноября 2003 г. Сначала орбитальный блок, состоящий из двух космических аппаратов (КА) «Ямал-200» (блок КА), и разгонный блок были выведены ракетой-носителем «Протон» на низкую околоземную орбиту. Далее разгонным блоком (РБ) ДМ блок КА (БКА) был доставлен на околостационарную орбиту с долготой в начальной точке 88,2 ° в. д. После отделения от РБ ДМ и разделения БКА, КА-1 и КА-2 «Ямал-200» начали полёт по командам центра управления полётом (ЦУП) «Ямал».
Одной из основных составляющих управления полётом геостационарных спутников является баллистико-навигационное обеспечение (БНО). В статье кратко представлены структура, организация и реализация оперативного БНО полёта КА-1 и КА-2 «Ямал-200».
-
1. задачи, структура и средства баллистико-навигационного обеспечения космических аппаратов «ямал»
1.1. Основные задачи баллистико-навигационного обеспечения
Основной задачей БНО является обеспечение полёта КА «Ямал-200» при установке в рабочую точку (РТ)
и при полёте в РТ с отклонениями по широте и долготе, не превышающими ±0,1 ° . БНО реализуется путём периодической передачи в бортовой комплекс управления (БКУ) уставочной информации по необходимым манёврам, а также навигационной информации для БКУ (векторы состояния и теневые участки) на всём интервале штатной эксплуатации КА.
Особенностью полёта любого КА на геостационарной орбите (ГСО) является необходимость периодической коррекции его положения относительно требуемой точки, что связано с лунно-солнечными возмущениями и аномалиями гравитационного поля Земли [1–5].
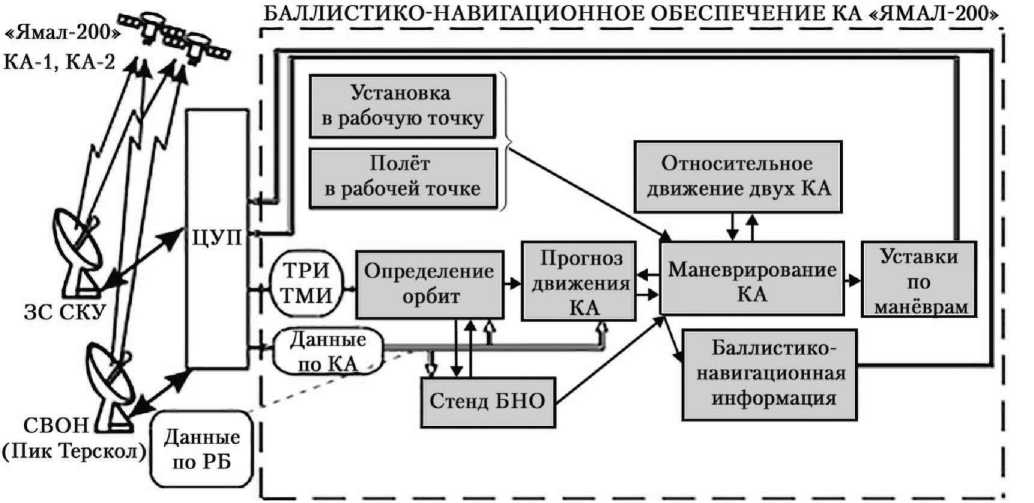
Основные задачи, решаемые в рамках БНО (рис. 1):
-
• анализ и первичная обработка траекторных измерений (ТРИ) и обработка телеметрической информации (ТМИ) по работе двигательной установки;
-
• определение орбиты КА;
-
• прогнозирование движения КА;
-
• определение схем полёта КА для следующих этапов:
-
– установки в РТ;
-
– полёта в РТ;
-
– перелёта и/или увода с ГСО;
-
• расчёт параметров манёвров и уставочной информации по манёврам для БКУ;
-
• расчёт навигационной информации для БКУ (векторы состояния, теневые интервалы);
-
• расчёт баллистической информации для ЦУП (общий баллистический план полёта);
ТРИ тми
Данные по КА
«Ямал-200»
БАЛЛИСТИКО-НАВИГАЦИОННОЕ ОБЕСПЕЧЕНИЕ КА «ЯМАЛ-200»
КА-1, КА-2
ЦУП
ЗС СКУ
Стенд БНО
Установка в рабочую точку
Определение орбит
СВОН £±5 (Пик Терскол)
Прогноз движения КА
Полёт в рабочей точке
Данные [ по РБ
Уставки по манёврам
Маневрирование КА
Баллистиконавигационная информация
Относительное движение двух КА
Рис. 1. Основные задачи, решаемые в рамках баллистико-навигационного обеспечения (БНО) космических аппаратов (КА) «Ямал-200»: ЗС СКУ — земная станция служебного канала управления; СВОН — средства высокоточных оптических наблюдений; ЦУП — центр управления полётом; РБ — разгонный блок; ТРИ — траекторные измерения; ТМИ — телеметрическая информация (рисунок создан авторами)
-
• планирование траекторных измерений и расчёт целеуказаний для земной станции служебного канала управления (ЗС СКУ), являющейся штатным средством измерений (относительной дальности, азимута и угла места), и для периодически привлекаемых средств высокоточных оптических наблюдений обсерватории «Пик Терскол».
1.2. Особенностикосмических аппаратов серии «Ямал»
По сравнению с другими геостационарными КА, «Ямал-100» и «Ямал-200» имеют ряд принципиальных особенностей, оказывающих существенное влияние на БНО и управление КА в целом [6, 7]. Это и очень малая тяга двигателей ( ∼ 4 гс), и «косое» расположение тяговых модулей (ТМ) (рис. 2), что приводит как к относительно высокой частоте проведения коррекций — один раз в 1,5–3,5 сут (у западных КА — один раз в 30–60 сут), — так и к выполнению манёвров путём последовательного включения разнонаправленных ТМ (рис. 3).
В результате достигается необходимая точность отработки уставки и выполняется управление движением вокруг центра масс КА с поддержанием кинетического момента маховиков в заданных пределах.
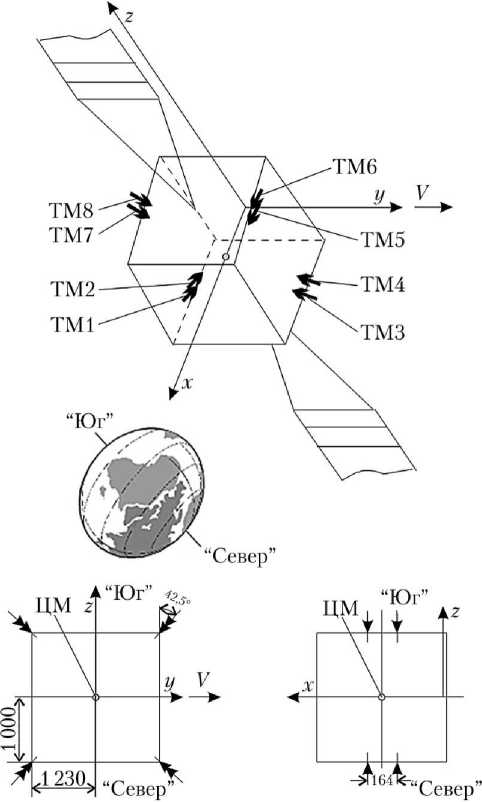
Рис. 2. Схема размещения тяговых модулей (ТМ):
ЦМ — центр масс (рисунок создан авторами)
кинетического момента маховиков:
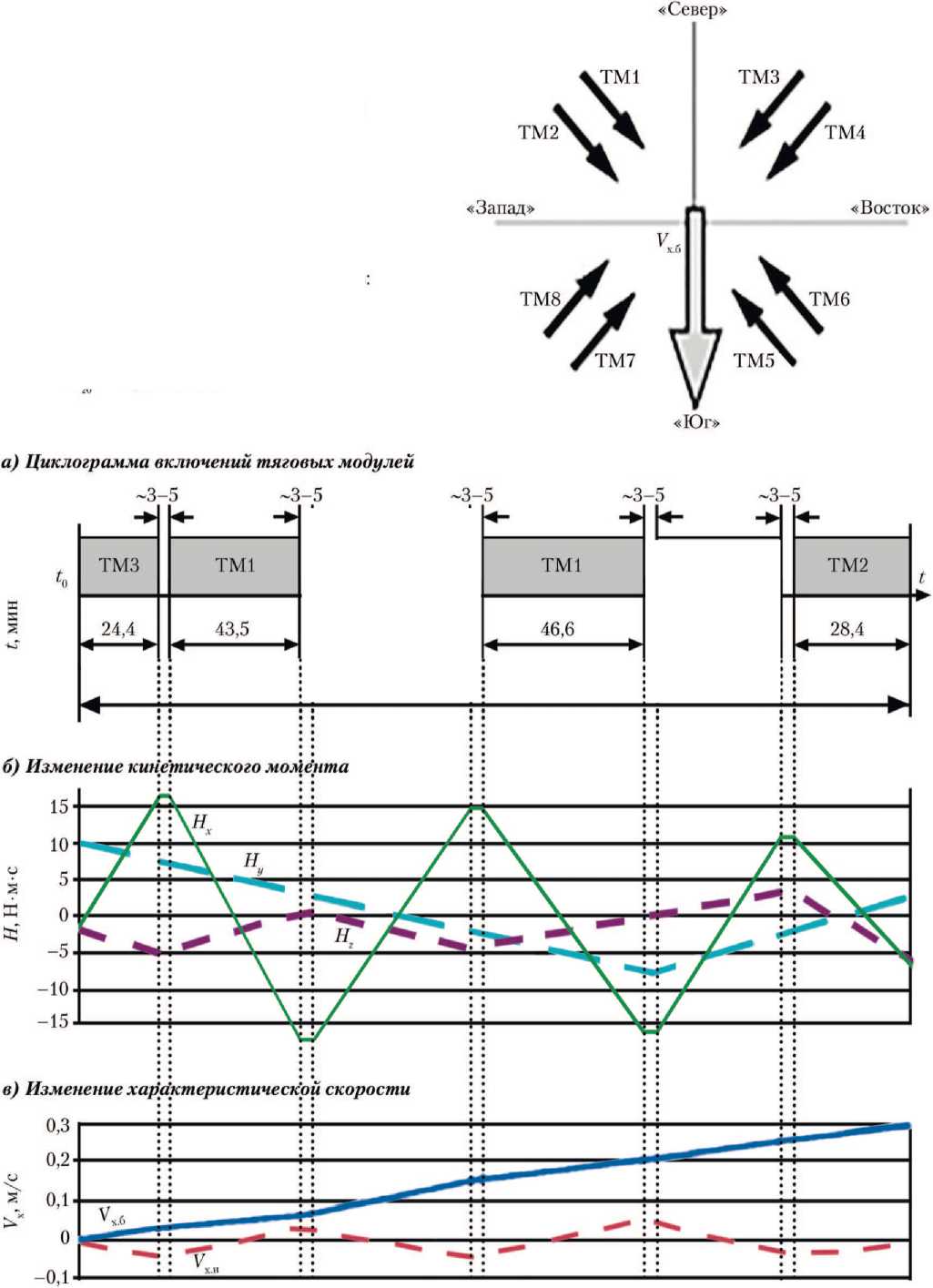
Рис. 3. Типовой манёвр коррекции орбиты: t — время; Hx, Hy, Hz — кинетический момент маховиков по осям x, y, z соответственно; V x.н и V x.б — характеристические скорости по нормали и по бинормали соответственно (рисунок создан авторами)
Пример:
Уставочные значения приращений характеристических скоростей:
У н = 0 м/с
УхВ = 0,3 м/с
Начальное значение яо=-1,006 Нм-с Я = 10,001 Н-м-с Я =-2,006Н-мс
|
тмз |
||
|
44,9 |
||
|
t<240 |
|
ТМ4 |
|
|
43,3 |
|
В баллистических расчётах маневрирования КА циклограммы включений ТМ заменяются эффективным средним ускорением в уставочном направлении. На дополётной фазе среднее ускорение определялось результатами статистического моделирования отработки манёвров по априорной модели бортовых алгоритмов системы управления движением КА с учётом полёта КА «Ямал-100». В программном обеспечении (ПО) БНО заложена возможность уточнения значений тяги ТМ по результатам решений задачи определения орбиты КА, и в процессе полёта значения тяги ТМ периодически уточняются, после чего соответствующим образом уточняются и средние значения ускорения в уставочных направлениях. Более подробно характеристики объединённой двигательной установки КА «Ямал-200» и особенности её использования при маневрировании приведены в работах [8, 9].
1.3. Средства траекторных измерений
В процессе разработки КА «Ямал-200» и параллельного управления полётом КА «Ямал-100» было принято решение, что основным штатным средством траекторных измерений КА «Ямал-200» будет ЗС СКУ (измерения относительной дальности, азимута и угла места).
Привлекаемым средством измерений, юстировки измерений и мониторинга окрестности движения КА-1 и КА-2 «Ямал-200» на всех этапах полёта был оптический телескоп обсерватории «Пик Терскол». По отдельному решению для безопасности полёта двух КА в одной РТ мог быть привлечён фазовый пеленгатор (ФП) «Ритм» (измерения направляющих косинусов). Предельные погрешности траекторных измерений составляли:
-
• 10 м по дальности от ЗС СКУ;
-
• 1…4 ′ по азимуту и углу места ЗС СКУ;
-
• 1…1,5 ″ по углам склонения и прямого восхождения обсерватории «Пик Терскол»;
-
• 2⋅10–5…3⋅10–5 по направляющим косинусам ФП «Ритм».
Перед пуском КА «Ямал-200» было принято решение не использовать ФП «Ритм» в процессе полёта КА «Ямал-200».
-
1.4. Функциональное программное обеспечение баллистико-навигационного обеспечения
Программная организация функционального программного обеспечения (ФПО) БНО имеет описанные далее особенности.
В части информационного взаимодействия с ЦУП , ФПО реализуется как автономная программная система, взаимодействующая с ЦУП (точнее, с общей базой данных) по специальным интерфейсам. Весь обмен осуществляется по двум условным «каналам» (входная и выходная информация ФПО БНО) с помощью специальных таблиц сообщений, c которыми все транзакции протоколируются и могут контролироваться системным ПО ЦУП верхнего уровня. Обмен включает два типа информации:
-
• собственно сообщения (например, «Расчётная нештатная ситуация — отказ ТМ», «Положение КА по долготе вне нормы» и т. п.);
-
• сообщения-ссылки на таблицы данных (например, уставочная информация по манёврам, общий баллистический план полёта КА и т. п.).
Передача информации в ЦУП осуществляется по командам оператора, а ряд диагностических сообщений, связанных с вводом информации от ЦУП, формируется автоматически.
В части внутренней программной организации:
-
• верхний уровень ФПО БНО представляет диалоговая управляющая программа (УП), структура которой по всем уровням описывается специальной базой данных;
-
• прикладные задачи организованы по модульному принципу и автоматически интегрируются в УП;
-
• прикладные задачи имеют развитые и наглядные средства графического отображения;
-
• УП может быть реконфигурирована под конкретный набор задач;
-
• ФПО БНО реализует принцип открытой архитектуры, что позволяет наращивать без ограничений состав прикладных задач;
-
• в ФПО БНО заложены принципиальные возможности для последующей автоматизации решения стандартных последовательностей прикладных задач.
-
2. Предполётная подготовка баллистико-навигационного обеспечения
Основу всех этих решений составили стандартные группы данных, используемых в ФПО БНО (например, вектор состояния, план коррекций и т. п.). Поэтому для генерации расчётной задачи указываются списки входных и выходных данных. Кроме того, каждая расчётная задача имеет широкий набор предупредительных и фатальных кодов возврата, которые с использованием специальной базы данных обрабатываются УП, и оператор оперативно может получить описание соответствующего кода и рекомендации по дальнейшим действиям. Предупредительные коды описывают, как правило, ситуации, когда задача принципиально решена, но имеются некоторые особенности, на которые оператору следует обратить внимание. Фатальные коды — когда задача с заданными начальными условиями не может быть решена.
Таким образом, ФПО БНО с точки зрения информационного сопряжения является автономной программной системой, которая переносима и может быть «состыкована» с любым ЦУП, поддерживающим соответствующий интерфейс. По внутренней организации ФПО БНО представляет собой реконфигурируемую систему с открытой архитектурой, развитой диагностикой и онлайн-помощью для оператора, а также наглядными средствами графического отображения.
Отладка и проверка расчётной части ПО были проведены в процессе подготовки к запуску КА «Ямал-100» и включали в себя:
-
• автономную отработку каждого расчётного программного модуля по специально подготовленным тестовым примерам;
-
• сопряжение расчётных модулей с управляющей программой;
-
• отработку типовых цепочек расчётных задач.
-
3. оперативное баллистико-навигационное обеспечение при полёте
3.1. Начальный этап полёта
Запуск КА «Ямал-200» состоялся 24 ноября 2003 г. в 09 ч 36 мин по декретному московскому времени (ДМВ). КА-1 и КА-2 в составе БКА были выведены на околостационарную орбиту без замечаний, в соответствии со схемой, приведённой на рис. 4.
По каждому расчётному модулю были выпущены «Руководство оператора» и «Руководство программиста» (техническое описание). В последнем документе содержалось полное алгоритмическое описание, информация по программной реализации и описание тестовых примеров.
ФПО БНО в основном было отработано в процессе управления полётом «Ямал-100». При подготовке к запуску КА «Ямал-200» была проведена адаптация ФПО БНО для решения задач БНО полёта КА «Ямал-200». Отладка системы ввода/вывода ФПО БНО КА «Ямал-200» включала в себя автономную отладку, моделирование специальных потоков сообщений, а также стыковочные испытания с системным ПО на файл-сервере ЦУП. Натурная отработка средств траекторных измерений ЗС СКУ, ФП «Ритм» и средств высокоточных оптических наблюдений была проведена при подготовке к пуску и в процессе управления полётом КА «Ямал-100». Заранее, до пуска КА «Ямал-200», проводились тренировки всего персонала ЦУП «Ямал», в т. ч. комплексная тренировка в реальном времени группы БНО на основе специального баллистического сценария, описывающего все события, связанные с БНО.
Длительность данного этапа составила 6 ч 43 мин 53 с. В 16 ч 05 мин 49 с ДМВ БКА отделился от РБ, а в 16 ч 05 мин 56 с произошло разделение БКА, и с этого момента начался этап начальных режимов КА-1 и КА-2. Как видно из табл. 1, полученные параметры околостационарной орбиты были близки к расчётным.
После разделения БКА в период с 24.11.2003 до 04.12.2003 были реализованы операции этапа начальных режимов: раскрытие антенн, гашение угловых скоростей, построение солнечной ориентации, раскрытие солнечных батарей, построение трёхосной ориентации, тестирование приборов и системы управления движением, тесты ТМ и газовых двигателей объединённой двигательной установки и проведение ТРИ.
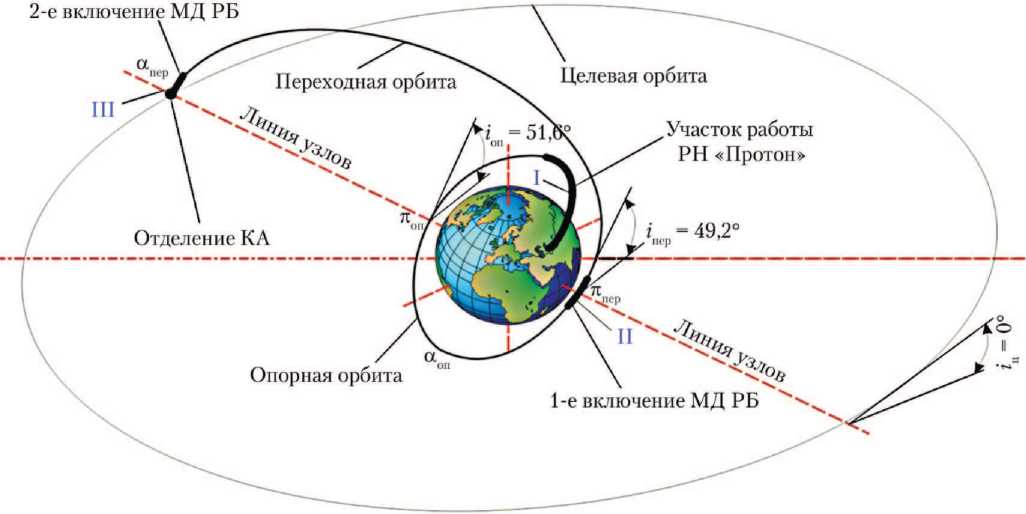
Рис. 4. Схема выведения космических аппаратов (КА) «Ямал-200»: I — участок выведения на опорную орбиту; II — участок выведения на переходную орбиту; III — участок выведения на целевую орбиту; РН — ракета-носитель; МД РБ — маршевые двигатели разгонного блока; i оп , i пер , i ц — наклонения опорной, переходной и целевой орбит соответственно; аоп , апер — апогеи опорной и переходной орбит соответственно; п оп , ппер — перигеи опорной и переходной орбит соответственно [9]
Таблица 1
Параметры околостационарной орбиты выведения
|
Параметр |
Номинальное значение |
Фактическое значение |
Отклонение |
Допуск |
|
Период, с |
86 500 |
86 564 |
64 |
270 |
|
Эксцентриситет |
0,0200 |
0,0190 |
0,0010 |
0,0035 |
|
Наклонение, ° |
0 |
0,0280 |
0,0028 |
0,1000 |
|
Географическая долгота, ° |
88,20 |
88,28 |
0,08 |
1,00 |
На этом этапе группой БНО ежедневно решались следующие задачи:
• анализ и первичная обработка ТРИ и обработка ТМИ по тестам двигательной установки;
• определение орбиты каждого КА;
• прогнозирование движения КА;
• предварительный расчёт и анализ плана манёвров установки КА в РТ;
• расчёт навигационной информации (вектор состояния, теневые интервалы) и передача этих данных в общую базу данных для пересылки в БКУ;
• формирование общего баллистического плана полёта и передача его в главную оперативную группу управления для планирования работы ЦУП;
• планирование ТРИ, расчёт целеуказаний и передача этой информации в общую базу данных ЗС СКУ, а также на электронную почту астрономической обсерватории «Пик Терскол».
3.2. Установка космических аппаратов «Ямал» в рабочие точки
В первые сутки полёта движение КА-1 и КА-2 «Ямал-200» прогнозировалось по начальным условиям ЦУП РБ «Голицыно», переданным в условленное время в ЦУП КА «Ямал» по специальным форматам. Результаты решения задачи определения орбиты КА-1 и КА-2 «Ямал-200» подтверждались независимыми данными системы NORAD .
После выполнения этапа начальных режимов в период с 04.12.2003 по 28.01.2004 проводились коррекции орбиты для установки КА-1 в РТ стояния 90°±0,1° в. д. и КА-2 — в РТ стояния 49°±0,1° в. д. Целью этапа установки КА в РТ является перевод КА с околоста-ционарной орбиты в заданную РТ ГСО. Геометрия номинальной околостационарной орбиты приведена на рис. 5. На этом же рисунке показано размещение трансверсальных манёвров, необходимых для установки КА в РТ.
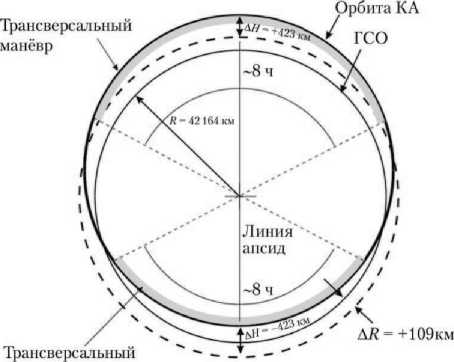
маневр
Рис. 5. Номинальные характеристики околостаци-онарной орбиты (ОСО): отклонение периода орбиты +335 с; начальная скорость дрейфа -1,4 ° /сут; эксцентриситет 0,01; ГСО — геостационарная орбита; КА — космический аппарат; R — радиус ГСО; A R — отклонение среднего радиуса ОСО от радиуса ГСО; A Н — отклонение высоты орбиты КА от среднего радиуса ОСО (рисунок создан авторами)
Для расчёта манёвров установки была разработана математическая модель, основанная на введении для трансверсальных манёвров псевдоимпульсов с положительным и отрицательным направлениями (в виде полувитков на всех элементарных интервалах их возможного проведения), что позволило сформулировать задачу в рамках классического линейного программирования с размерностью, равной учетверённому количеству витков маневрирования [10, 11]. Сплошные много-витковые трансверсальные манёвры получаются соединением смежных полувитковых трансверсальных манёвров одинакового направления. Коррекция наклонения выполняется с использованием бинормальных манёвров, размещаемых на свободных от трансверсальных манёвров участках, с малой тягой, направленной по бинормали к орбите.
Корректируемыми параметрами для трансверсальных манёвров являются:
-
• географическая долгота подспутниковой точки;
-
• скорость дрейфа по долготе;
-
• эксцентриситет.
Бинормальные манёвры, корректирующие наклонение орбиты, выполняются в окрестности линии узлов. Определяющими здесь являются начальное наклонение орбиты и квазивековой уход наклонения за время перелёта. Сами коррекции наклонения размещаются на свободных от трансверсальных манёвров участках. Модель позволяет достаточно просто учитывать различные операционные ограничения на проведение манёвров. В качестве терминальных параметров в задаче установки КА в РТ используются средние элементы, т. е. элементы, осреднённые по возмущениям с периодом до одного года включительно.
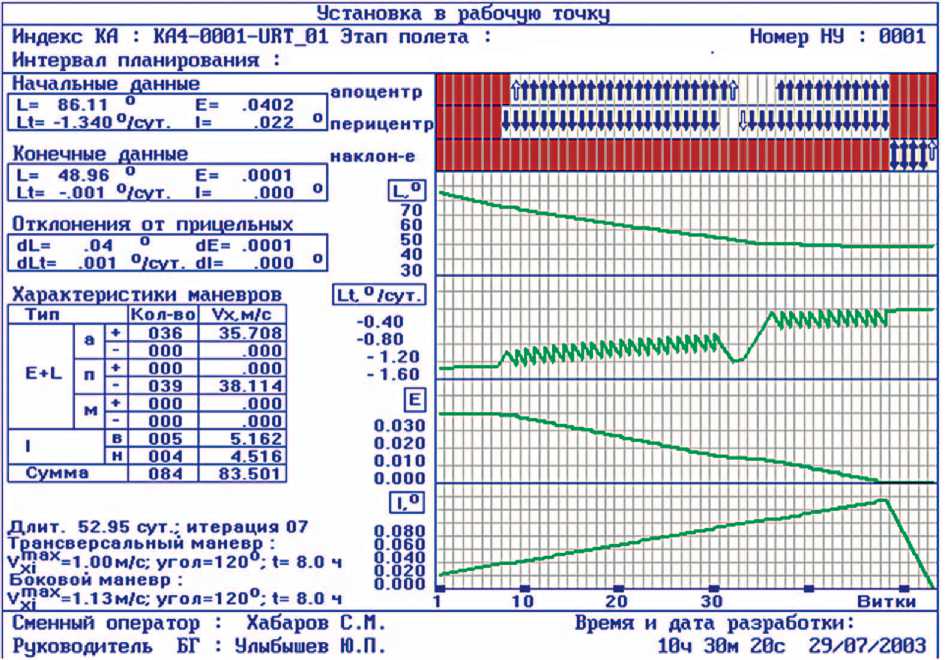
На дополётной фазе подготовки КА к пуску были рассчитаны номинальные траектории установки КА в РТ. Обсчёт проводился с помощью модуля расчёта манёвров установки КА в РТ, которая уже на тот момент имела развитые и наглядные средства графического отображения. На рис. 6 приведены конечные графические формы решения задач номинальной установки КА в РТ с основными номинальными характеристиками и распределением манёвров, а также графики изменения корректируемых параметров за время установки.
Следует отметить, что изначально планировалось проведение установки запущенных спутников в РТ в режиме парных включений ТМ. Однако при таком режиме была выявлена устойчивая тенденция реализации парных включений с отработкой менее 60–70% от требуемой характеристической скорости, и/или отработанная скорость менялась скачкообразно от манёвра к манёвру. Поэтому, в соответствии с эксплуатационной документацией, в процессе установки было принято решение о проведении манёвров в режиме одиночных включений ТМ. В итоге это привело к увеличению длительности этапа установки КА в РТ.
По результатам статистического анализа данных решений задачи определения орбиты, на этапе установки в РТ в ФПО БНО и в системе управления движением КА были скорректированы значения тяги ТМ. После каждой коррекции значений тяги ТМ при наборе достаточного количества статистических данных корректировались среднеэффективные ускорения в уставочных направлениях, используемые системой маневрирования в качестве модели отработки манёвров.
В табл. 2 приведены основные характеристики этапа установки КА-1 и КА-2 в РТ.
На рис. 7 приведена хронология установки КА «Ямал-200» в РТ.
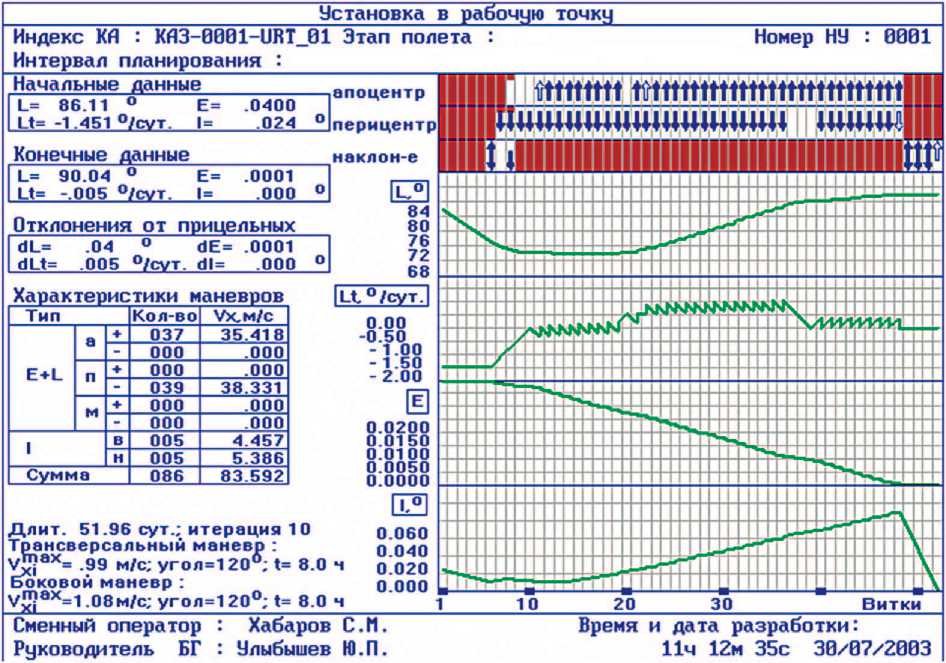
а)
б)
Рис. 6. Номинальная установка космических аппаратов (КА) «Ямал-200» в рабочие точки: а — КА-1; б — КА-2; L — географическая долгота; Lt — дрейф по географической долготе; Е — эксцентриситет; I — наклонение; а, п, м — апогейные, перигейные и многовитковые манёвры соответственно; в — восходящий узел; н — нисходящий узел; V x m i ax — максимальное значение характеристической скорости; t — время (рисунок создан авторами)
Таблица 2
характеристики этапа установки в рт
|
Характеристика |
КА-1 |
КА-2 |
|
Начало маневрирования |
04.12.2003 |
03.12.2003 |
|
Всего манёвров |
103 |
70 |
|
Суммарные затраты V х , м/с |
53,6 |
37,9 |
|
Долгота рабочей точки, ° в. д. |
90 |
49 |
|
Дата установки в рабочую точку |
27.01.2004 |
11.01.2004 |
На протяжении всего этапа установки КА в РТ, помимо расчёта манёвров, группой баллистики решался весь круг задач баллистического обеспечения полёта, в т. ч. обеспечение мониторинга тесных и опасных сближений с другими КА [12] по данным оптических наблюдений телескопа обсерватории «Пик Терскол».
Отклонения от прицельных параметров при установке КА-1 и КА-2 в РТ составили:
по долготе ~0,005°; по скорости дрейфа долготы ~0,00006 °/сут; по наклонению ~0,003°; по эксцентриситету ~0,00003.
Таким образом, была подтверждена высокая точность решения и реализации задачи установки КА «Ямал-200» в свои РТ.
3.3. Полёт в рабочих точках
Для решения задачи расчёта манёвров удержания КА по широте и долготе в заданном диапазоне на этапе полёта в РТ и на этапе прецизионной установки в РТ использовалась система расчёта коррекций, разработанная на основе алгоритмов, описанных в работе [13]. Корректируемыми параметрами являются векторы наклонения, эксцентриситета, долгота и скорость долготного дрейфа. Прогноз движения на расчётном интервале маневрирования осуществляется с помощью численноаналитического интегрирования управляемого движения КА с учётом влияния гармоник гравитационного поля Земли, притяжения Луны и Солнца, светового давления и малой тяги ТМ.
Средства управления КА «Ямал-200», реализуемые в ФПО БНО, обеспечивают как терминальное управление (перевод орбитальных параметров на заданные прицельные параметры), так и формально нетерминальное управление (удержание КА в заданном диапазоне). Соответствующий выбор осуществляется через настроечные параметры схемы коррекций для однозначного расчёта состава корректирующих импульсов на интервале маневрирования. Организация управления движением векторов наклонения и эксцентриситета закладывает принципиальные основы для совместного согласованного управления двумя КА «Ямал» в окрестности одной РТ.
При номинальном расчёте план коррекций включает корректирующие импульсы двух видов:
-
• бинормальные коррекции вектора наклонения;
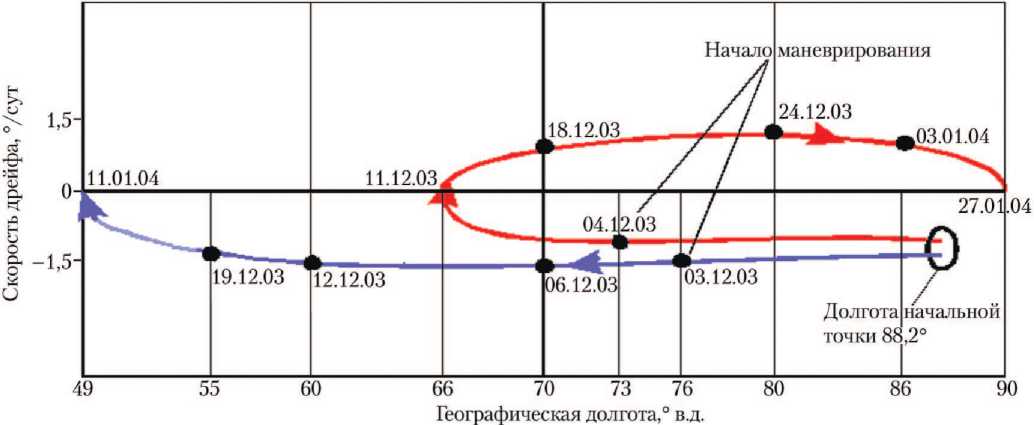
Рис. 7. Хронология установки космических аппаратов «Ямал-200» в рабочие точки: ^" — КА-1; ^" — КА-2 [9]
-
• трансверсальные коррекции вектора эксцентриситета и/или долготы и скорости долготного дрейфа.
В качестве терминальных параметров в задачах коррекции вектора наклонения могут использоваться средние, квазисредние или оскулирующие (истинные) элементы орбиты. Под квазисредними элементами понимаются элементы, осреднённые по полугодовым и годовым возмущениям. В задачах коррекции вектора эксцентриситета и долготного дрейфа в качестве терминальных параметров могут использоваться средние или квазисредние элементы.
Для КА «Ямал-200» на этапе полёта в РТ в качестве корректируемых были использованы средние элементы орбиты.
Этап лётных испытаний продолжался ~30 сут.
Оценка точности удержания КА-1 и КА-2 «Ямал-200» выполнялась по методике «Контрольные измерения характеристик поддержания в РТ». Сводные данные по характеристикам точности удержания обоих КА в РТ представлены в табл. 3.
На этапе лётных испытаний в процессе удержания КА-1 в окрестности 90,00 ° в. д. были проведены:
-
• один трансверсальный манёвр коррекции скорости дрейфа с установкой КА-1 на фазовую траекторию;
-
• четыре трансверсальных манёвра совместной коррекции эксцентриситета и скорости дрейфа для перевода вектора эксцентриситета на окружность принудительного дрейфа и коррекции фазовой траектории дрейфа;
-
• 19 манёвров коррекции наклонения.
В процессе удержания КА-2 в окрестности 49,00 ° в. д., в соответствии с эксплуатационной документацией, были проведены:
-
• один трансверсальный манёвр коррекции скорости дрейфа с установкой КА-2 на фазовую траекторию;
-
• два трансверсальных манёвра совместной коррекции эксцентриситета и скорости дрейфа для перевода вектора эксцентриситета на окружность принудительного дрейфа и коррекции фазовой траектории дрейфа;
-
• 29 манёвров коррекции наклонения.
Суммарные затраты характеристической скорости на удержание КА в РТ составили:
-
• для КА-1: по широте ~4,0 м/с; по долготе ~0,68 м/с;
-
• для КА-2: по широте ~6,11 м/с; по долготе ~0,14 м/с, что соответствует расчётным значениям.
Работы по подтверждению характеристик точности удержания были выполнены в соответствии с эксплуатационной документацией. Эти данные подтверждались расчётами, проведёнными специалистами оптической астрономической обсерватории «Пик Терскол».
На этапе штатного функционирования была принята следующая схема коррекций удержания КА в РТ:
-
• бинормальные коррекции проводятся в обоих узлах орбиты с периодичностью один раз в 1,5–2,5 сут, при этом корректируется вековой уход среднего вектора наклонения;
-
• период орбиты корректируется одиночными трансверсальными манёврами и путём введения трансверсальных добавок (до 0,01 м/с) в бинормальные коррекции;
-
• вектор эксцентриситета удерживается в процессе проведения коррекций периода в пределах окружности радиусом ~0,0005.
Данный подход позволяет осуществлять качественное управление КА с учётом его конструктивных особенностей (размещение ТМ) при возможных повышенных ошибках знания параметров орбиты КА без увеличения энергозатрат на процесс удержания КА в РТ.
Таблица 3
характеристики точности удержания космических аппаратов «ямал» в рабочих точках
|
Характеристика |
КА-1 |
КА-2 |
|
Долгота рабочей точки, ° в. д. |
90,00±0,1 |
49,00±0,1 |
|
Диапазон дат подтверждения |
04.02.2004 – 02.03.2004 |
15.01.2004 – 25.02.2004 |
|
Фактическая точность по долготе, ° в. д. |
90,00±0,08 |
49,00±0,08 |
|
Фактическая точность удержания по широте, ° |
±0,08 |
±0,035 |
Средняя продолжительность бинормальных манёвров коррекций при полуторасуточной периодичности коррекций вектора наклонения составляет ~3 ч, со средним бинормальным ускорением ~2,0·10–5 м/с2. Бинормальный манёвр отрабатывается пятью-семью включениями ТМ. Периодичность проведения трансверсальных манёвров коррекции периода и вектора эксцентриситета составляет от двух недель до месяца, с продолжительностью трансверсальных манёвров 1,0–1,3 ч и средним трансверсальным ускорением ~1,9·10–5 м/с2. Трансверсальный манёвр отрабатывается двумя-тремя включениями ТМ.
На всём этапе штатного функционирования КА-1 и КА-2 отклонения от РТ не превышали значений участка лётных испытаний.
После подтверждения баллистических характеристик удержания КА в РТ специалисты РКК «Энергия» ежедневно проводили полный цикл работ по оперативному БНО полёта и стендовой поддержке КА-1 и КА-2 «Ямал-200», а в конце 2006 г. управление было передано оператору АО «Газпром космические системы». С этого момента и до конца 2012 г. специалисты РКК «Энергия» на договорной основе осуществляли баллистическое сопровождение полёта КА-1 и КА-2 «Ямал-200», включающее корректировку следующих данных, используемых при работе группы баллистики ЦУП КА «Ямал-200»:
-
• баллистических схем полёта для КА на интервал времени более трёх суток;
-
• параметров схемы маневрирования;
-
• характеристик ТМ и газовых двигателей по ТМИ КА и результатам ТРИ, получаемых из ЦУП КА «Ямал»;
-
• значений средних ускорений в уставочных направлениях;
-
• параметров настройки базы данных модулей определения орбиты и моделирования движения КА;
-
• состава векторов определяемых и «мешающих» параметров системы определения орбиты КА;
-
• параметров базы данных модулей определения орбиты с целью улучшения точностных характеристик решения, — а также анализ телеметрической информации по включениям ТМ при манёврах и разгрузке кинетического
момента маховиков и работы по поддержанию работоспособности ФПО БНО.
КА-1 «Ямал-200» отработал на ГСО 10,5 лет и в июне 2014 г. был выведен из эксплуатации. КА-2 «Ямал-200» функционирует до сих пор [8, 9]. На всех этапах полёта, включая начальный этап, установку в РТ, полёт в РТ, замечаний к баллистическому обеспечению и работе ФПО БНО не было.
заключение
Создание баллистико-навигационного обеспечения как системы является сложной задачей, соединяющей в себе создание программного обеспечения, подготовку персонала и документации, отработку всего комплекса средств ЦУП и наземного комплекса управления, в первую очередь в части ТРИ. Данная задача была успешно решена. Как показало время, принятая для КА серии «Ямал» концепция БНО полёта была верной, поэтому в дальнейшем с соответствующими доработками она также с успехом применялась для решения баллистических задач и в других проектах. Таким образом, разработанное ПО и опыт РКК «Энергия», приобретённый в процессе его разработки, могут быть использованы при создании как геостационарных КА, так и КА других типов.
Список литературы Баллистико-навигационное обеспечение полёта космических аппаратов «Ямал-200»
- Чернявский Г.М., Бартенев В.А. Орбиты спутников связи. М.: Связь, 1978. 240 с.
- Чернявский Г.М., Бартенев В.А., Малышев В.А. Управление орбитой стационарного спутника. М.: Машиностроение. 1984. 144 с.
- Chao C.-C.G. Applied Orbit Perturbation and Maintenance, AIAA, Inc., Reston, Virginia, 2005. 2G4 p.
- Kamel A.A., Wagner C.A. On the orbital eccentricity control of synchronous satellites // Journal of the Astronautical Sciences. 1982. V. 30. № 1. P. G1-73.
- Slavinskas D.D., Dabbaghi H., Benden W.J. Efficient inclination control for geostationary satellites // Journal of Guidance, Control, and Dynamics. 1988. V. 11. № 6. URL: https://doi.org/10.2514/ 3.20356 (accessed 01.06.2023) [русский перевод: Славинскас Д., Деббачи Х., Бенден У.Дж. Эффективный метод коррекции наклонения орбиты геостационарного спутника // Аэрокосмическая техника. 1989. № 6. С. 188].
- Патент RU 2207969 C2. МПК B64G1/28, B64G1/44. Способ формирования управляющих воздействий на космический аппарат с силовыми гироскопами и поворотными солнечными батареями / Богачев А.В., Земсков Е.Ф., Ковтун В.С., Орловский И.В., Платонов В.Н., Соколов А.В., Улыбы-шев Ю.П.; заявитель и патентообладатель — ПАО «РКК «Энергия». Заявка № 2001112734/28 от 08.05.2001. Опубликовано 10.07.2003.
- Ковтун В.С. Анализ сложного процесса управления расходом топлива геостационарного космического аппарата «Ямал» // Космическая техника и технологии. 2013. № 2. С. 33-41. EDN: SPEAAR
- Ганзбург М.Ф., Кропотин С.А., Мурашко В.М., Попов А.Н., Севастьянов Н.Н., Смоленцев А.А., Соколов А.В., Соколов Б.А., Сухов Ю.И. Итоги десятилетней эксплуатации электроракетных двигательных установок в составе двух телекоммуникационных космических аппаратов «Ямал-200» на геостационарной орбите // Космическая техника и технологии. 2015. № 4(11) С. 25-39. EDN: VECUHF
- Башмаков В.Н., Корякин А.И., Кропотин С.А., Попов А.Н., Севастьянов Н.Н., Соколов А.В., Соколов Б.А., Сухов Ю.И. Методология создания и отработки электроракетной двигательной установки телекоммуникационных космических аппаратов «Ямал-200» (к 15-летию эксплуатации в космосе) // Космическая техника и технологии. 2019. № 2(25) С. 91-106. EDN: WZOAQM
- Соколов А.В., Улыбышев Ю.П. Многовитковые манёвры с малой тягой в окрестности геостационарной орбиты // Известия РАН. Теория и системы управления. 1999. № 2. С. 95-101. EDN: MPDIZB
- Улыбышев Ю.П. Обзор методов оптимизации траекторий космических аппаратов с использованием дискретных множеств псевдоимпульсов // Космическая техника и технологии. 2016. № 4(16). С. 67-79. EDN: YHCWKJ
- Улыбышев Ю.П. Геостационарная орбита как исчерпаемый ресурс // Полёт. 2008. № 7. С. 20-25. EDN: JSECYR
- Улыбышев Ю.П. Управление геостационарной орбитой. Машиностроение: энциклопедия: в 40 т. / Главн. ред. К.В. Фролов. Разд. IV: Расчёт и конструирование машин. T. IV-22: Ракетно-космическая техника / Под ред. В.П. Ле-гостаева. В 2 кн. М.: Машиностроение, 2012. Кн. 1. Разд. 2.4.1. С. 155-160. Статья поступила в редакцию 25.05.2023 г. Окончательный вариант — 02.06.2023 г.
