Беспилотный комплекс управления низкоманевренным подвижным объектом

Автор: Козорез Дмитрий Александрович, Кружков Дмитрий Михайлович
Журнал: Спецтехника и связь @st-s
Статья в выпуске: 5-6, 2012 года.
Бесплатный доступ
В представленной статье описывается состав и структура бортовых средств автономного низкоманевренного подвижного объекта. Описана взаимосвязь составных частей бортового комплекса: навигационной системы, системы управления, системы приводов и видеофиксации
Спутниковая навигация, инерциальная навигация, автономная система управления
Короткий адрес: https://sciup.org/14967122
IDR: 14967122
Текст научной статьи Беспилотный комплекс управления низкоманевренным подвижным объектом
Внастоящее время проблемой обеспечения автономного функционирования низкоманевренных подвижных объектов различного назначения занимается большое количество как коммерческих, так и государственных организаций. Некоторые из них уже достигли определенного успеха в этом направлении (пример – Google). В нашей стране также ведутся подобные работы, в частности, в рамках участия в соревнованиях «Робокросс». Ранее лабораторией робототехники факультета №7 Московского авиационного института уже были разработаны архитектура, состав бортового комплекса, а также сам действующий прототип автономного низкоманевренного подвижного объекта на базе автомобиля Иж «Ода» [1]. Разработанная система доказала свою жизнеспособность, однако присутствовал ряд недостатков, в частности, было выявлено существенное запаздывание отработки исполнительными механизмами (ИМ) сигналов управления. В связи с этим было принято решение модернизировать всю систему в рамках уже разработанной архитектуры, путем модификации отдельных ее узлов и алгоритмов функционирования.
Модернизация прототипа
В рамках соревнований «Робокросс – 2012» совместными усилиями лабораторий робототехники 7, 3 и 1 факультетов Московского авиационного института был разработан прототип автономного низкоманевренного подвижного объекта на базе автомобиля ГАЗ 31102, способный осуществлять самостоятельное перемещение при движении по маршруту для решения различных целевых задач. Прототип был оснащен автономными системами навигации и управления, в состав которых входили: интегрированная навигационная система, система автоматического управления, микропроцессор TI TMS320F28335, платы силового питания приводов, привода, цифровая камера оптического диапазона и аналоговая камера оптического и ближнего инфракрасного диапазона, блок радиоантенн.
Состав модернизированного прототипа
Состав модернизированного бортового оборудования можно условно разделить на блоки, взаимосвязь между которыми изображена на рис. 1 .
Информационным ядром автономной роботизированной системы подвижного объекта является портативный персональный компьютер (ППК), на котором функционирует приложение, реализующее алгоритм управления при движении транспортного средства по маршруту. Связь между блоками обеспечивается проводными соединениями по интерфейсу RS-232. Рассмотрим состав и структуру блоков бортового комплекса более подробно.
Навигационная система
В качестве поставщика навигационной информации для автоматической системы управления была выбрана интегрированная [2 – 4] система, интеграция данных в которой осуществляется по слабосвязанной схеме [2, 3]. В качестве резервной системы для дублирования навигационного реше-

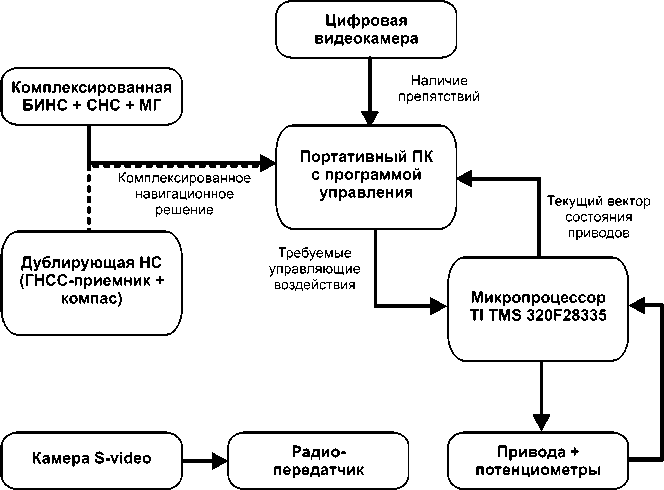
Рис. 1. Архитектура бортового комплекса
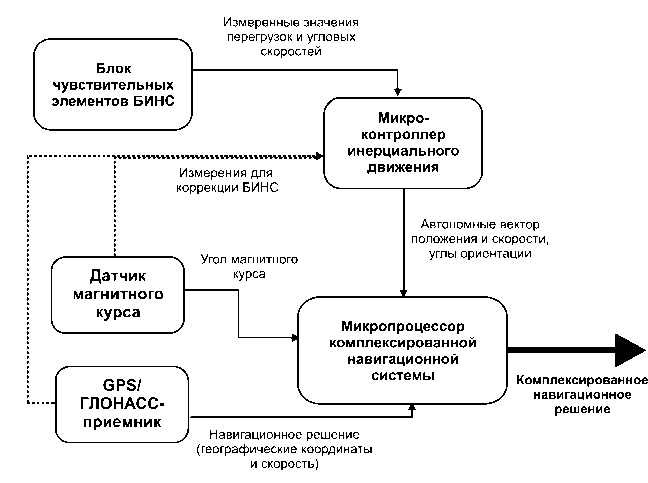
Рис. 2. Интегрированная навигационная система
салоне, передающая радиоантенна с круговой диаграммой направленности вынесена на крышу.
Система автоматического управления Для выполнения различных целевых задач автономным низкоманевренным подвижным объектом необходимо наличие системы автоматического управления на борту. Построение маршрута системой автоматического управления должно учитывать наличие препятствий на пути объекта. Для их распознавания на объекте была установлена цифровая камера, передающая изображение через порт USB 2.0 на ППК. На ППК непрерывно работает подсистема детектирования критических препятствий, обрабатывающая полученное изображение путем выделения замкнутых контуров, ранжирует их по площади и расположению на изображении, после чего принимает решение о критичности имеющихся препятствий и необходимости их объезда. Результаты своей работы подсистема детектирования критических препятствий передает в основное приложение, реализующее алгоритмы управления. Основное приложение, в свою очередь, учитывает факт наличия препятствий путем изменения кривизны рассчитываемого сплайна траектории движения по маршруту [5]. На рис. 3 изображена схема взаимосвязей блоков в системе управления.
Также в состав бортовых устройств добавлена аналоговая камера ближнего инфракрасного и оптического диапазонов, передающая сигнал S-Video на радиопередатчик, установленный в автомобиле. С помощью антенны с круговой диаграммой направленности, установленной на крыше объекта, этот передатчик транслирует в эфир на частоте Wi-Fi сигнал с камеры. Этот сигнал может быть принят и выведен на дисплей оператором беспилотного подвижного объекта в целях мониторинга состояния окружающей объект обстановки или для решения целевой задачи.
ния был взят туристический ГНСС – приемник со встроенным компасом. Состав основной интегрированной навигационной системы представлен на рис. 2 .
Магнитный компас вынесен на штанге впереди объекта, блок инерциальных чувствительных элементов установлен над центральным тоннелем в салоне максимально близко к центру масс объекта, антенны ГНСС-прием-ников вынесены на крышу. Цифровая видеокамера была установлена рядом с датчиком магнитного курса на штанге, аналоговая камера установлена на специальном креплении над передним бампером. Передатчик, транслирующий с нее видеосигнал, установлен в
Функционирование прототипа
Для движения объекта по маршруту необходимо управлять ИМ рулевого колеса, акселератора, педалей сцепления и тормоза. Схема управления ИМ приведена на рис. 4 .
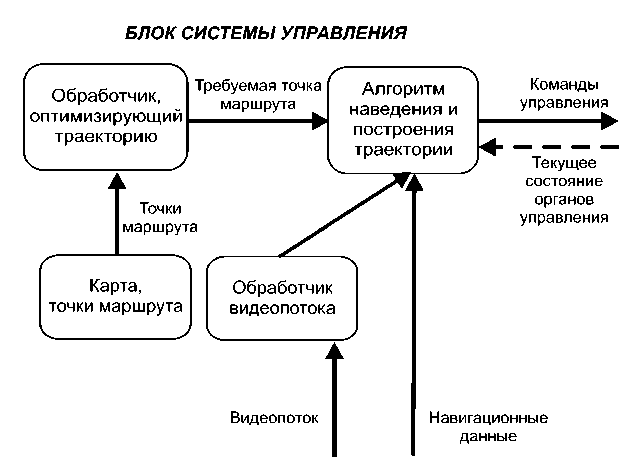
Рис. 3. Система управления

Рис. 4. Исполнительные механизмы
Сигнал управления, содержащий строковое слово составной команды, принимается микропроцессором фирмы Texas Instruments [6] от портативного ПК по порту RS-232. В слове команды может быть как команда калибровки ИМ, так и команда управления. Расшифрованная команда преобразуется микропроцессором в набор слова состояния выходных пинов порта микропроцессора, которые могут принимать значения 0 и 1. Эти сигналы подаются на плату управления приводами, где в зависимости от сигнала (0/1) того или иного пина порта микропроцессора происходит коммутация силовой цепи конкретного привода для движения ИМ в ту или иную сторо- ну. Для контроля положения каждого из приводов была заведена обратная связь, реализованная на основе многооборотных потенциометров. Напряжение на потенциометрах изменяется пропорционально перемещению штоков приводов. Его значение обрабатывается АЦП микропроцессора и с заданной частотой отсылается в порт на ПК.
Результаты
Проведенные ходовые испытания роботизированного низкоманевренного подвижного объекта подтвердили работоспособность бортовых алгоритмов, а также правильность компоновки всех подсистем. В частности, навигационная система прототипа в штатном режиме с настраиваемой частотой 1 – 10 Гц вырабатывала навигационное решение с максимальной ошибкой порядка 2 – 3 метров (среднеквадратическое отклонение). Стоит отметить, что на рассматриваемом объекте функционировал автодоводчик, реализованный на цифровой видеокамере, который обеспечивал повышение точности локальной навигации при объезде препятствий. Система управления вырабатывала корректные команды в режиме реального времени. Разработанная компоновка блока исполнительных механизмов, установленных на салазках штатного крепления водительского сидения, а также высокое быстродействие системы в целом (отработка рулевого управления от упора до упора – 5 с, педалей – 1 с), позволяет говорить об универсальности разработки и о ее пригодности для использования в любых подвижных объектах.
В целом построенный низкоманевренный подвижный объект можно признать способным автономно перемещаться по маршруту при решении различных целевых задач ■
Список литературы Беспилотный комплекс управления низкоманевренным подвижным объектом
- Козорез Д.А., Кружков Д.М. Состав и структура автономных систем навигации и управления роботизированным прототипом автомобиля./Спецтехника и связь, 2012. -№ 3. -С. 15 -18.
- Современные информационные технологии в задачах навигации и наведения беспилотных маневренных летательных аппаратов./Под ред. М.Н. Красильщикова и Г.Г. Себрякова. -М.: Физматлит, 2009.
- Жуковский А.П., Расторгуев В.В. Комплексные системы навигации и управления самолетов. -М.: МАИ, 1998.
- Статистическая динамика и оптимизация управления летательных аппаратов. А.А. Лебедев, В.Т. Бобронников, М.Н. Красильщиков, В.В. Малышев. -М., Машиностроение, 1985.
- Динамика полета беспилотных летательных аппаратов. Лебедев А.А., Чернобровкин Л.С. -М., Машиностроение, 1973.
- http://www.ti.com/product/tms320f28335, 13.08.2012.
