Бездатчиковое управление высокооборотным вентильно-индукторным генератором микроэнергетической установки

Автор: Колпахчьян П.Г., Ольховатов Д.В.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 4 т.19, 2019 года.
Бесплатный доступ
Введение. В распределенных и автономных системах генерации, использующих возобновляемые источники энергии, действуют генерирующие установки малой мощности (не более 100-200 кВт) на базе микротурбин. Наиболее эффективно микротурбины функционируют на высоких частотах вращения. В связи с этим генератор, работающий с микротурбиной, тоже должен быть высокооборотным. Генератор - это вентильно-индукторная электрическая машина (ЭМ), которой необходима информация о положении ротора. В таких механизмах при высоких оборотах затруднительно применение датчика положения. В данной статье рассматриваются вопросы бездатчикового управления высокооборотным вентильно-индукторным электрогенератором совместно с паровой микротурбиной.Материалы и методы. Итак, необходимо оценить правильность разработанного принципа управления высокооборотной вентильно-индукторной ЭМ. С этой целью создана математическая модель, включающая модели исследуемой ЭМ, преобразователя электроэнергии и системы управления...
Микротурбина, электрогенератор, вентильно-индукторная машина, бездатчиковое управление
Короткий адрес: https://sciup.org/142221970
IDR: 142221970 | УДК: 621.313 | DOI: 10.23947/1992-5980-2019-19-4-357-365
Sensorless control of the high-speed switched reluctance generator of the micro power plant
Introduction. In the distributed and autonomous generation systems using renewable energy sources, low-power generating units (not more than 100-200 kW) based on microturbines function. Microturbines operate most efficiently at high rotational speeds. In this regard, the generator running with a microturbine must also be a high-speed one. A generator is a switched reluctance electric machine (EM) that needs information on the rotor position. It is difficult to use a position sensor in such mechanisms at high speeds. This paper discusses the issues of sensorless control of a high-speed switched reluctance electric generator in conjunction with a steam microturbine.Materials and Methods. So, it is required to evaluate the proof-of-principle developed to control a high-speed switched reluctance EM. For this purpose, a mathematical model has been created including models of the investigated EM, an electric power converter, and a control system. For the EM under consideration, the active resistance is determined, as well as the dependence of the phase flux linkage on the current flowing through it and the position of the moving element...
Текст научной статьи Бездатчиковое управление высокооборотным вентильно-индукторным генератором микроэнергетической установки
УДК 621.313
Образец для цитирования: Колпахчьян, П. Г. Бездатчико-вое управление высокооборотным вентильно-индукторным генератором микроэнергетической установки / П. Г. Колпахчьян, Д. В. Ольховатов // Вестник Донского гос. техн. ун-та. — 2019. — Т. 19, № 4. — С.
Введение. Одно из направлений развития энергетики связано с применением распределенных и автономных систем генерации, использующих возобновляемые источники энергии. В таких системах действуют генерирующие установки малой мощности (не более 100–200 кВт). Их особенность — комбинированное использование различных видов энергии: солнечное излучение, ветер, геотермальные источники, утилизация отходов и т. п. Наиболее сложной с точки зрения использования в системах распределенной или автономной генерации является тепловая энергия, так как ее необходимо преобразовать в электрическую. В рассматриваемых энергетических системах для этого рационально применять паровые микротурбины. Они работают на влажном или перегретом паре, который электрогенератор преобразует в электрическую энергию. Решая задачу компактности и эффективности турбины, следует обеспечить высокую частоту ее вращения. Соответственно, генератор также должен быть рассчитан на работу с высокой частотой вращения.
Использование высокооборотной (high-speed) турбины накладывает ограничения на конструкцию сопряженного с ней электрогенератора. Из-за высокой скорости вращения его целесообразно выполнять на общем валу с паровой турбиной, так как наличие муфт для сопряжения турбины и генератора существенно усложняет конструкцию и последующее обслуживание. В системах автономной и распределенной энергетики в качестве электрогенераторов на мощностях до 200 кВт широко применяются синхронные электрические машины (ЭМ) с постоянными магнитами на роторе. Они обладают наилучшими удельными характеристиками. Однако с учетом высоких скоростей вращения конструирование таких электрических машин осложняется проблемами крепления постоянных магнитов и балансировкой ротора. Кроме того, если электрогенератор работает в непосредственной близости от турбины, он оказывается в зоне высоких температур, недопустимых для постоянных магнитов. Поэтому в качестве электрогенератора, предназначенного для работы совместно с паровой микротурбиной, целесообразно использовать вентильно-индукторную ЭМ, у которой отсутствуют обмотка и постоянные магниты на роторе.
Для управления вентильно-индукторной ЭМ необходима информация о положении ротора. В большинстве случаев для этого используется датчик положения ротора. При работе на высоких скоростях вращения нежелательно располагать электрогенератор в непосредственной близости от паровой турбины, т. к. это значительно усложняет конструкцию. Известны различные способы определения положения ротора вентильноиндукторной ЭМ без датчика положения [1–4]. Однако их использование для высокооборотного генератора требует учета ряда особенностей. Представленная статья посвящена вопросам применения бездатчикового управления высокооборотным вентильно-индукторным генератором, предназначенным для работы совместно с паровой микротурбиной.
Материалы и методы
Обзор существующих решений и постановка задачи. Как правило, в вентильно-индукторных ЭМ применяются датчики положения ротора дискретного типа. Такое решение увеличивает габариты электрической машины и усложняет технологию сборки и настройки.
В настоящее время для вращающихся вентильно-индукторных ЭМ разработаны принципы бездатчико-вого управления. Они отличаются использованием различных информационных признаков определения положения ротора [2–4]. В большинстве случаев такие решения не могут быть непосредственно использованы для высокооборотных генераторов.
Практически все способы определения положения ротора вентильно-индукторной ЭМ без использования физических датчиков основаны на однозначной зависимости индуктивности фазы от положения ротора (рис. 1).
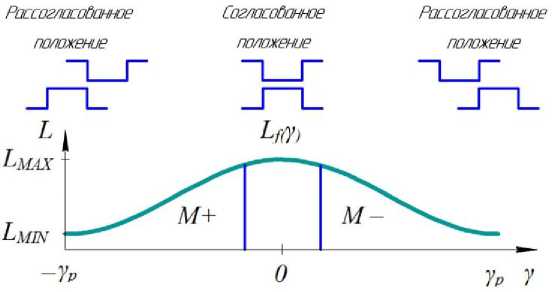
Рис. 1. Зависимость индуктивности фазы вентильно - индукторной электрической машины от положения ротора
В согласованном положении (зубец ротора находится под зубцом статора) индуктивность максимальна, в несогласованном положении (зубец ротора находится между зубцами статора) — минимальна. Насыщение магнитной системы влияет на разницу между максимальным и минимальным значениями индуктивности, но не меняет характера зависимости. Поэтому положение подвижного элемента можно определить, используя косвенное измерение индуктивности фазы вентильно-индукторной ЭМ.
Машиностроение и машиноведение
Варианты реализации этого способа отличаются методом оценки индуктивности одной или нескольких фаз в процессе работы венитильно-индукторной ЭМ [3, 4]. Используемый метод предполагает зондирование неработающей фазы электрической машины короткими импульсами напряжения равной длительности и измерение тока в этой фазе. Если длительность импульса напряжения намного меньше постоянной времени фазы, то амплитуда импульса тока обратно пропорциональна индуктивности. Таким образом, регистрируя максимум амплитуды токового импульса, можно определить прохождение ротором несогласованного положения для зондируемой фазы. Эта информация используется для формирования управляющих воздействий другими фазами. Тестовые импульсы подаются серией в течение времени, соответствующего прохождению ротором несогласо- ванного положения. Точность определения положения ротора зависит от частоты следования тестовых импульсов.
Разновидностью способа определения положения ротора вентильно-индукторной электрической машины по изменению индуктивности фазы является использование в качестве тестового основного импульса напряжения (рис. 1). Реализация такого способа возможна как в двигательном, так и в генераторном режиме.
Следует отметить ограниченность применения метода, основанного на зондировании неработающей фазы тестовыми импульсами для высокооборотной вентильно-индукторной ЭМ. Длительность тестовых импульсов напряжения, необходимая для получения импульсов тока достаточной для измерений величины, является значительной по сравнению с длительностью времени подачи этих импульсов. Поэтому с ростом частоты вращения за интервал измерений подается количество тестовых импульсов, недостаточное для измерения положения с необходимой для целей управления точностью. Это существенно снижает точность определения положения ротора, поэтому на высоких скоростях вращения ограничено применение такого метода без дополнительного уточнения положения ротора. Для повышения точности измерений в этом случае следует оценить скорость нарастания тока при подаче основного импульса напряжения или частоту следования импульсов напряжения, формирующих ток фазы до перехода в одноимпульсный режим управления.
Формулирование проблемы бездатчикового управления высокооборотного вентильноиндукторного электрогенератора. Особенностью конструкции вентильно-индукторной ЭМ является однозначная зависимость индуктивности фазы от положения ротора относительно статора. Этот эффект может быть использован для косвенного определения положения ротора. Как было отмечено выше, такой способ определения положения ротора является наиболее распространенным. При этом необходимо учитывать, что насыщение магнитной системы существенно влияет на индуктивность. Стремление уменьшить размеры ротора для снижения момента инерции и улучшения прочностных показателей привело к тому, что рассматриваемый электрогенератор является сильно насыщенной электрической машиной. При максимальном токе статора индуктивность в согласованном положении снижается более чем в три раза по сравнению с индуктивностью в ненасыщенном состоянии. На рис. 2 показаны зависимости индуктивности фазы от угла поворота ротора при разных токах.
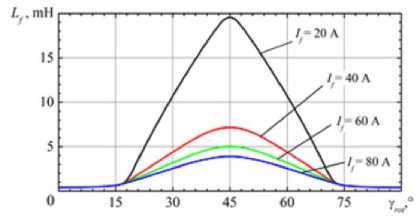
Рис. 2. Зависимости индуктивности фазы статора от угла поворота ротора при разных токах
Частота следования тестовых импульсов, используемых для оценки индуктивности фазы, определяется типом применяемого аналого-цифрового преобразователя. При использовании встроенных преобразователей управляющих микропроцессорных устройств время преобразования составляет порядка 2–3 мс. Если использовать такое же соотношение зубцов статора и ротора при частоте вращения ротора 12 000 об/мин (200 Гц), то частота следования импульсов тока фазы должна быть в четыре раза больше — 800 Гц. Как указано выше, тестовые импульсы подаются при отсутствии тока в фазе, если индуктивность меняется от положения ротора. Этот интервал в режиме генерации соответствует нарастанию индуктивности и составляет порядка одной четверти периода следования токовых импульсов [3]. Из приведенных на рис. 2 зависимостей видно, что изменение индуктивности, необходимое для измерений, происходит при угле поворота ротора в диапазоне от 20° до 45°.
Для рассматриваемого случая интервал времени подачи тестовых импульсов составляет около 300 мкс. За это время аналого-цифровой преобразователь может выполнить 100–120 отсчетов. Коэффициент заполнения тестовых импульсов не может превышать 0,5, т. к. иначе после снятия напряжения ток не будет успевать снижаться до нуля. На практике же коэффициент заполнения тестовых импульсов не превышает 0,25–0,3, чтобы не допускать слишком большого нарастания тока при минимальной индуктивности фазы и снизить влияние на процесс измерений электродвижущей силы (ЭДС), возникающей в фазе при вращении ротора.
Необходимо учитывать погрешности преобразования и необходимость достоверной фиксации максимума амплитуды токового импульса. В этой связи минимальное количество измерений на один тестовый импульс напряжения — 10–15. Тогда на интервале подачи тестовых импульсов их количество не будет превышать
6-8, что дает разрешающую способность определения положения ротора на уровне 4-6°. Такая точность определения положения ротора недостаточна для целей управления.
Индуктивность фазы рассматриваемой ЭМ в начале интервала измерений составляет порядка 5 мГн в ненасыщенном состоянии (при токе до 20 А, см. рис. 2). При напряжении в звене постоянного тока 600 В интенсивность нарастания тока будет 120 000 А/с. Оценку положения ротора целесообразно выполнять при токе 5-10 А, до достижения насыщения, так как в этом случае зависимость индуктивности от положения ротора линейна. Тогда на номинальной скорости вращения будет проводиться порядка 20–30 отсчетов, что дает разрешающую способность на уровне 0,5–1°. Таким образом, применение основного токового импульса на высоких скоростях вращения обеспечивает на порядок более высокую точность оценки положения ротора (в сравнении с использованием тестовых импульсов).
В процессе пуска и разгона генератора применение тестовых импульсов, подаваемых в неработающую фазу, дает более точную оценку положения ротора, поэтому в системе управления необходимо совместное использование обоих методов.
Математическая модель вентильно-индукторной электрической машины. Для оценки правильности разработанного принципа управления высокооборотной вентильно-индукторной ЭМ была разработана математическая модель (ММ), включающая модели исследуемой ЭМ, преобразователя электроэнергии и системы управления. При составлении модели были приняты допущения, учитывающие особенности решаемой задачи [5-8]. Основное из них: фазы рассматриваемой ЭМ имеют не связанные между собой в магнитном отноше нии магнитопроводы, поэтому процессы в них рассматриваются независимо.
При принятых допущениях электромагнитные процессы в фазе ЭМ рассматриваемого типа описываются уравнением [1-4]:
d У f 1,2,3 dt
= U f 1,2,3 - I f 1,2,3 ( Т f 1,2,3 , Y rot ) R f 1,2,3 ,
где Y f 1, 2 , 3 , U f 1,2,3 и R f 1,2,3 — потокосцепление, напряжение и активное сопротивление фаз;
If 12 3 (^f 12 3, Yrot) — ток фазы, определяемый в зависимости от величины потокосцепления фазы и поло- жения ротора.
Для рассматриваемой ЭМ были определены активное сопротивление и зависимости потокосцепления фазы от протекающего через нее тока и положения подвижного элемента.
Процессы в звене постоянного тока при принятых допущениях описываются следующими уравнениями:
-у( E 0 - R 0 I 0 - Uc ) ;
dt L 0
”"dT = C(I0-(Id 1 + Id2 )), где E0, L0, R0 — ЭДС, индуктивность и активное сопротивление звена постоянного тока; С, UC — емкость в звене постоянного тока на входе преобразователя и напряжение на ней.
Напряжение на фазах формируется таким образом, чтобы обеспечить создание токового импульса заданной величины и длительности. В соответствии с принятыми допущениями, величина напряжения, приложенного к фазе, определяется в соответствии со следующими условиями:
U f
dt
-U c , если I f - 0 л I f > 0.
Здесь I m — амплитуда формируемого токового импульса фазы; A I — ширина токового коридора.
Длительность и фаза токового импульса прямоугольной формы с заданной амплитудой определяется начальным и конечным углами а 0 и а 1, отсчитываемыми от согласованного положения фазы.
Токи, потребляемые фазами от звена постоянного тока, при используемом принципе переключения силовых полупроводниковых приборов определяются в соответствии с выражением:
I d 1,2,3 - sign( U f 1,2,3 ) I f 1,2,3 , (4)
Машиностроение и машиноведение
где sign ^ f 1 2 з ) — функция выделения знака напряжения фазы.
Уравнения (1) и (2) с учетом выражений (3) и (4) представляют собой ММ, описывающие процессы в рассматриваемой вентильно-индукторной ЭМ. Ее задействовали для моделирования процессов в ЭМ при использовании бездатчикового алгоритма управления. В расчетах кроме указанных параметров и характеристик ЭМ применены следующие значения: активное сопротивление и индуктивность в звене постоянного тока приняты равными R о = 0,1 Ом; L о = 0,001 Гн; емкость конденсатора звена постоянного тока C = 5000 мкФ; ЭДС звена постоянного тока E 0 = 595 В.
Результаты исследования. Для исследования рассмотренных вариантов бездатчикового определения положения ротора высокоскоростного вентильно-индукторного генератора наибольший интерес представляет режим работы с номинальной скоростью. В этом режиме ЭМ управляется в одноимпульсном режиме. Моменты включения и выключения силовых ключей определяются в зависимости от положения ротора. Условие максимально эффективной отдачи энергии работающей фазой — наличие тока заданной величины в фазе к моменту, когда ротор находится в положении, соответствующем началу интервала генерации этой фазы (см. рис. 1). Для этого с некоторым опережением к фазе прикладывается импульс положительного напряжения: замыкаются оба силовых ключа (например, для фазы A , S 1 и S 2). После того как ротор займет положение, соответствующее началу процесса генерации, силовые ключи выключаются, и начинается процесс генерации. Для ограничения неконтролируемого роста тока при достижении им заданного значения один из ключей размыкается — и образуется контур короткого замыкания фазы через замкнутый силовой ключ и диод.
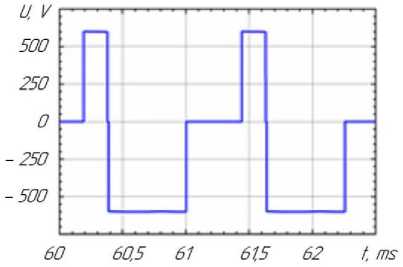
На рис. 3 представлены результаты моделирования электромагнитных процессов в реактивноиндукторном генераторе при номинальной частоте вращения.
a)
в)
Рис. 3. Результаты математического моделирования процессов в реактивно - индукторном генераторе при номинальной частоте вращения: напряжение ( а ); индуктивность ( б ); ток ( в ); электромагнитный момент ( г )
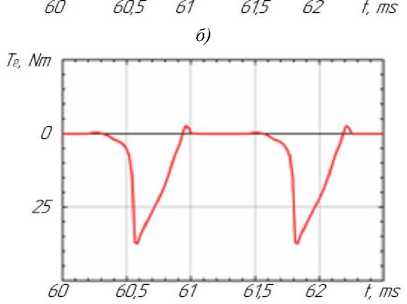
г)
L, mH
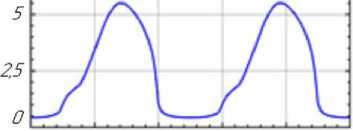
Параметры импульса возбуждения рассчитаны таким образом, чтобы к началу процесса генерации ток фазы достигал заданного значения 100 А. В этом случае отсутствует пауза между импульсом возбуждения и началом генерации, во время которой фаза находится в состоянии короткого замыкания. На рис. 3 приведены зависимости напряжения, тока и индуктивности фазы, а также развиваемого ею электромагнитного момента.
Как следует из приведенного выше описания принципа управления, в одноимпульсном режиме процесс генерации является неуправляемым, а ЭМ регулируется за счет изменения параметров импульса возбуждения. Моменты его начала и окончания зависят от положения ротора. Поэтому точность определения положения имеет важное значение для эффективной работы ЭМ [9, 10]. Если импульс возбуждения подается с опережением, он смещается в сторону уменьшения индуктивности фазы , ее ток нарастает с большей интенсивностью, и фаза переводится в режим короткого замыкания. Величина паузы между окончанием импульса возбуждения и началом процесса генерации зависит от расхождения между расчетным и реальным положением ротора и может использоваться для коррекции оценки положения ротора.
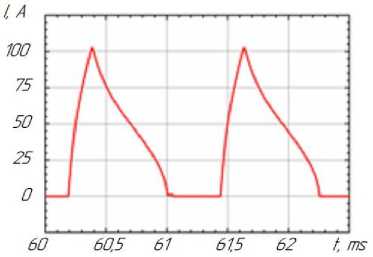
Если импульс возбуждения подается с запаздыванием относительно расчетного момента времени, он смещается в сторону большей индуктивности, и его длительности не хватает для нарастания тока до заданного значения. Поэтому снижение величины тока в момент окончания импульса возбуждения — признак того, что оценка положения ротора выполнена с отставанием от реального значения. На рис. 4 показаны зависимости тока фазы для случаев совпадения, опережения и отставания оценки положения ротора от его действительного значения.
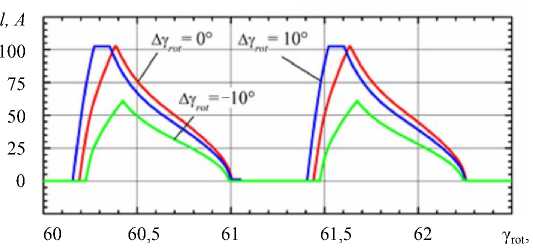
Рис. 4. Зависимости тока фазы реактивно - индукторной ЭМ для случаев совпадения, опережения и отставания оценки положения ротора
Приведенные на рис. 4 зависимости подтверждают возможность использования выявленных информационных признаков для оценки ошибки определения положения ротора.
Сравнение полученных кривых позволяет выявить следующую особенность. Кривая тока фазы в режиме генерации имеет точку перегиба, соответствующую максимуму индуктивности фазы. В случае неизменного тока фазы (рис. 2) он соответствует согласованному положению зубцов статора и ротора. При снижении тока в процессе движения ротора насыщение магнитной системы снижается, и положение максимума индуктивности фазы смещается в сторону больших углов. У этого эффекта есть особенность: положение точки перегиба кри- вой тока не зависит от времени подачи импульса возбуждения, а будет определяться только значением тока в начале процесса генерации. Эта особенность также может быть использована для уточнения положения ротора вентильно-индукторной ЭМ при работе в одноимпульсном режиме.
Применение описанных информационных признаков требует контроля тока, его первой и второй про- изводной. При использовании распространенных типов аналогово-цифровых преобразователей (АЦП) ошибоч- ность измерений будут достигать 5–10 %. Поэтому для фильтрации сигнала тока в системе управления высоко- оборотным реактивно-индукторным генератором предлагается фильтр Калмана третьего порядка, использую- щий модель тока фазы, построенную на базе уравнения:
dIf dt
L f (y rot , I f )
U f - R f I f - I f Ю rot
9 L f ( Y rot , I f )
^Y rot
I f = const v
На рис. 5 приведены результаты анализа процессов в вентильно-индукторной ЭМ при использовании бездатчикового управления, реализующего описанные выше принципы определения положения ротора.
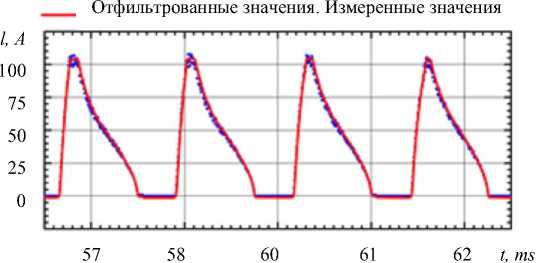
Рис. 5. Процесс коррекции оценки положения ротора в одноимпульсном режиме работы реактивно - индукторной ЭМ
Машиностроение и машиноведение
Расчеты проводились при следующих условиях. ЭМ вращается с номинальной скоростью. Импульс возбуждения имеет те же параметры, что и для рассмотренного ранее случая. Токи фаз статора измеряются АЦП со временем преобразования 5 мкс и имеют погрешность 10 %, распределенную по нормальному закону. В начальный момент оценка положения ротора на 10 градусов отличается от реального. Представлен процесс коррекции оценки положения ротора. Анализ полученных результатов показал эффективность предложенного метода фильтрации результатов измерения токов фаз и возможность использования выявленных информационных признаков для коррекции оценки положения ротора в одноимпульсном режиме работы реактивноиндукторной ЭМ.
Обсуждение и заключения. Анализ полученных результатов позволяет сделать ряд выводов. Реактивно-индукторный генератор, предназначенный для работы совместно с паровой микротурбиной, управляется без датчика положения ротора, с использованием соответствующего алгоритма. Существует однозначная зависимость между положением ротора и индуктивностью фазы статора, поэтому все методы бездатчикового определения положения ротора базируются на косвенном измерении индуктивности фазы. На высоких скоростях вращения без датчика положения ротора нерационально применять подходы, основанные на подаче в неработающую фазу серии тестовых импульсов, так как разрешающая способность такого способа недостаточна для эффективного контроля генератора. В этом случае рациональным является контроль параметров основного импульса тока.
Реактивно-индукторная ЭМ в режиме генерации управляется путем изменения времени подачи и длительности импульса напряжения (импульса возбуждения), который к началу процесса генерации создает ток в фазе ЭМ. Момент подачи и длительность импульса возбуждения определяются положением ротора, поэтому эффективное управление процессом генерации возможно только при точной оценке положения ротора. Для коррекции оценки положения ротора могут быть использованы такие информационные признаки, как: — наличие паузы между импульсом возбуждения и началом процесса генерации (оценка опережает действительное положение ротора);
— снижение тока к моменту начала генерации (оценка отстает от действительного положение ротора).
Для уточнения оценки также может использоваться следующий факт: на интервале генерации перегиб кривой тока, соответствующий максимуму индуктивности фазы, наблюдается при одном и том же положении ротора. Применение указанных информационных признаков позволяет создать эффективный алгоритм определения положения ротора высокооборотного реактивно-индукторного генератора без физического датчика.
Список литературы Бездатчиковое управление высокооборотным вентильно-индукторным генератором микроэнергетической установки
- Do, V. L. Modeling, simulation and control of reluctance motor drives for high speed operation/ V. L. Do, Та Cao Minh // 2009 IEEE Energy Conversion Congress and Exposition: рroc. - Режим доступа: https://ieeexplore.ieee.org/document/5316067 (дата обращения: 12.11.2019).
- Cai, J. A Position Sensorless Control of Switched Reluctance Motors Based on Phase Inductance Slope / J. Cai, Z. Deng // A Journal of Power Electronics. - 2013. - Vol. 13, № 2. - P. 264-274.
- Xin, K. A new simple sensorless control method for switched reluctance motor drives / K. Xin, Z. Qionghua, J. Luo // Electrical Machines and Systems: Eighth International Conference, 27-29 September 2005 in Nanjing / IEEE. - 2005. - Vol. 1. - P. 594-598.
- Kolpakhchyan, P. Emergency Generator Design for the Maritime Transport Based on the Free- Piston Combustion Engine / P. Kolpakhchyan, A. Kochin, A. Shaikhiev // Our See. - 2015. - Vol. 62, is. 2. - P. 78-84.
- Ефромеев, А. Г. Методика выбора вентильно-индукторного двигателя для построения физической модели привода / А. Г. Ефромеев, Д. И. Степаничев // Известия ТулГУ. Технические науки. - 2011. - № 2. - С. 140-143.
- Александровский, С. В. Разработка математической и имитационной модели вентильноиндукторного двигателя / С. В. Александровский, Ю. Н. Петренко // Энергетика. Известия высших учебных заведений и энергетических объединений СНГ. - 2011. - № 2. - С. 15-22.
- Сарач, E. Б. Особенности моделирования электрической трансмиссии транспортного средства на примере линейного тягового электрического привода / E. Б. Сарач, А. А. Стадухин // Наука и образование. - 2011. - № 10. - С. 61.
- Математическая модель вентильно-индукторной реактивной электрической машины / В. А. Дмитриевский// Наука и образование. - 2011. - № 10. - С. 60.
- Hamzehbahmani, H. Modeling and simulating of single side short stator linear induction motor with the end effect / H. Hamzehbahmani // Journal of electrical engineering. - 2011. - Vol. 62, № 5. - P. 302-308.
- Sensorless control of the linear switched-reluctance motor of emergency power generator / P. Kolpakhchyan// Journal of Electrical Engineering and Technology. - 2018. - № 13 (5). - P. 1956-1964.
