Безредукторные мехатронные преобразователи

Автор: Смирнов Юрий Сергеевич
Статья в выпуске: 22 (198), 2010 года.
Бесплатный доступ
Проанализированы характеристики современных безредукторных мехатронных преобразователей. Описаны достоинства их использования в различных сферах деятельности в аспектах универсальности, надежности, энергосбережения.
Безредукторный мехатронный преобразователь, энергосбережение, моментный электродвигатель
Короткий адрес: https://sciup.org/147154716
IDR: 147154716 | УДК: 629.78
Direct-drive mechatronic transducers
Characteristics of modern direct-drive mechatronic transducers are considered. The advantages of its use in various areas in the aspects of universality, reliability and energy efficiency are described.
Текст обзорной статьи Безредукторные мехатронные преобразователи
В большинстве применений целесообразным становится использование безредукторных мехатронных преобразователей (БМП), осуществляющих преобразование непрерывных [1] или дискретных [2] сигналов в перемещения. Структура БМП (рис. 1) представляет собой сочетание электромеханики и микроэлектроники, которые выполняют исполнительную и измерительную функции. Энергетика и быстродействие БМП в значительной мере определяются характеристиками моментных электродвигателей (МЭД). Опыт разработки МЭД и применения серии ДБМ в непрерывных БМП представлены в [1].
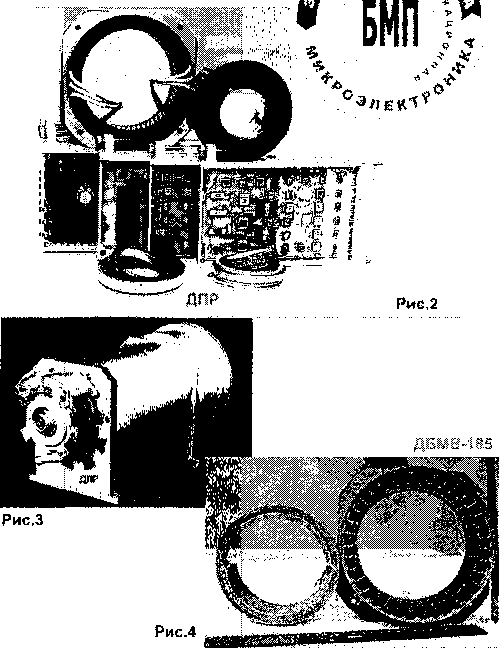
На основе МЭД типа ДБМ 185 был реализован дискретный БМП повышенной точности, компоненты которого представлены на рис. 2. Электромеханика БМП находится в особо тяжелых условиях и наработала 50 тыс. часов без ремонта и потери заданной точности преобразования, как в статике, так и в динамике. Согласно критерию Миллера динамическая ошибка в следящей системе не может быть меньше удвоенной величины мертвого хода редуктора. Последний без специальных устройств выборки зазора, увеличивающих трудоёмкость изготовления и снижающих срок службы редуктора, трудно сделать менее 5'. В БМП люфт отсутствует, поскольку объект управления, роторы МЭД и датчиков положения ротора (ДПР) связаны жёстко. Такое выполнение БМП позволяет реализовать единое информационное обеспечение процесса управления [3] по сигналам ДПР, в качестве которого используется двухотсчетный редуктосин (см. рис. 2).
Микроэлектронная часть БМП находится в более комфортных условиях и служит для преобразования квадратурных сигналов ДПР в цифровой эквивалент перемещения, дискретные сигналы коммутации обмоток МЭД и аналоговые эквиваленты скорости и ускорения перемещения, необходимые для реализации оптимального и адаптивного алгоритмов [2].
При работе МЭД в режиме вентильного электродвигателя в качестве ДПР могут использоваться бесконтактные синусно-косинусные датчики угла [1] или оптоэлектронные датчики (рис. 3). При этом регулирование скорости достигается изменением угла или алгоритма коммутации [4].
К достоинствам серии ДБМ следует отнести:
-
1. Удобство агрегатирования нескольких МЭД на общий вал.
-
2. Возможность эффективного отвода тепла от статора.
-
3. Продолжительная работа при токовом форсировании.
-
4. Достижение эффекта ресурсосбережения за счёт многократного увеличения срока службы БМП путём исключения редуктора, требующего при изготовлении трудоёмких металлорежущих операций.
Эти преимущества стали определяющими для разработки новой серии — ДБМВ, в которой реализуется преемственность по наружным диаметрам, длине пакета, значению показателей теплоотвода статора, пусковым токам.
В отличие от ДБМ новая серия МЭД ДБМВ характеризуется более широким диапазоном электромеханических выходных параметров. По сравнению с ДБМ статическая добротность увеличена
Ю.С. Смирное
Рис.1
Характеристики МЭД
Сопоставление МЭД габарита 185 (рис. 2 и 4) представлено в таблице.
Список литературы Безредукторные мехатронные преобразователи
- Беленький, Ю.М. Опыт разработки и применения бесконтактных моментных приводов/Ю.М. Беленький, Г.С. Зеленков, А.Г. Микеров. -Л.: ЛДНТП, 1987.-28 с.
- Домрачее, В.Г. Цифроаналоговые системы позиционирования. Электромеханотронные преобразователи: производственное издание/В.Г. Домрачее, Ю.С. Смирнов. -М.: Энергоатомиздат, 1990. -240 с.
- Smirnov, Y.S. Common Dateware of Robotics Mechatronic Converters. Proceedings of the Third ISMCR^93/Y.S Smirnov. -ITALY: Torino, 1993.
- Смирнов, Ю.С. Системы управления сервомеханизмами с шаговыми электродвигателями/Ю.С. Смирнов//Микропроцессорные средства и системы. -1985. -№4.-С. 71-77.
- Создание новой серии моментных двигателей интенсивного использования для бесконтактного моментного привода/А.Г. Микеров, Л.М. Епифанова, Д.А. Любшин и др.//Труды 5 Международной (16 Всероссийской) конференции по автоматизированному электроприводу АЭП2007. -СПб.: Новекс, 2007. -С. 240-243.
