Безредукторный асинхронный привод в системах низкочастотной виброобработки металлических конструкций

Автор: Аристов Анатолий Владимирович, Аристова Людмила Ивановна
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 1 т.17, 2017 года.
Бесплатный доступ
Рассмотрены вопросы построения электромеханических систем для низкочастотной виброобработки металлических конструкций, выполненных на базе двухфазного асинхронного двигателя, работающего во вращательно-колебательном, колебательном или вращательно-пульсирующем режимах за счет фазовой модуляции питающих напряжений. Представлена функциональная схема системы управления электроприводом, а также законы изменения электромагнитного поля в воздушном зазоре асинхронного двигателя при различных режимах работы. Произведена оценка выходных параметров электропривода с учетом параметров нагрузки и функций регулирования. Установлено условие обеспечения автономности регулирования колебательной составляющей движения при регулировании частоты.
Виброобработка металлических конструкций, вращательно-колебательный и пульсирующий режимы, асинхронный двухфазный двигатель, функциональная схема, выходные параметры
Короткий адрес: https://sciup.org/147158392
IDR: 147158392 | УДК: 621.345.1 | DOI: 10.14529/power170109
Direct asynchronous motor for low-frequency vibration treatment of steel structures
The paper presents the creation of electromechanical systems for the low-frequency vibration treatment of steel structures. The designed two-phase asynchronous motor operates either in rotation-vibration, vibration or rotation-pulsing modes provided by phase modulation of supply voltages. The electric motor drive control system functional configuration is proposed as along with the laws of electromagnetic field variation within the air gap of the asynchronous motor at its different operating modes. The output parameters of the electric drive motor are estimated with regard for the load parameters and control functions. The independent control for the vibratory component of the motor motion is provided at the frequency regulation.
Текст научной статьи Безредукторный асинхронный привод в системах низкочастотной виброобработки металлических конструкций
Одним из наиболее эффективных и экономичных способов снижения остаточных механических напряжений в металлических конструкциях и изделиях является применение технологии низкочастотной виброобработки. Она позволяет в ряде случаев не только отказаться от термической обработки изделий, что является достаточно трудоемким, требующим больших энергетических и финансовых ресурсов процессом, но и снизить уровень остаточных сварочных напряжений на 25–50 % в зависимости от различных марок сталей [1–4].
Как правило, существующие для этой цели электромеханические системы должны формировать сложные траектории движения, сочетающие в себе в зависимости от требований технологического процесса вращательную, колебательную и пульсирующую составляющие с регулируемыми параметрами. Конструктивно они выполняются на базе машин постоянного или переменного тока с дополнительными механическими звеньями преобразования параметров движения, что существенно ограничивает их динамические возможности по частоте вибрационной составляющей движения и ее формы, снижая надежность всей системы в целом.
Одним из решений поставленной задачи, позволяющим устранить перечисленные недостатки, может служить построение безредукторного вибрационного электропривода на основе двухфазного асинхронного электродвигателя (АД), работающего непосредственно в режимах колебательного или вращательно-периодического движения за счет фазовой модуляции питающих напряжений или токов [5, 6].
Функциональная схема электропривода
На рис. 1 представлена функциональная схема электропривода, реализующая потенциальный фазовый способ формирования вращательной, колебательной и пульсирующей составляющих закона движения в двухфазном АД.
Она содержит: частотный демодулятор (ЧД), преобразующий частоту питающей сети ю 1 в пропорциональный уровень постоянного напряжения U в1 ; два сумматора (SM1, SM2); прецизионный регулируемый блок питания постоянного напряжения (ПБП), задающий постоянное напряжение U ^ , пропорциональное частоте колебаний (пульсаций) Q; два преобразователя напряжение-частота (ПНЧ1, ПНЧ2); фазовое звено (ФЗ), сдвигающее по фазе входное напряжение сети на ±90 градусов; электронные ключи (SA1, SA2), определяющие режим работы электропривода; модулятор; выпрямитель и усилитель мощности (УМ).
При формировании колебательного режима работы АД электронные ключи SA1, SA2 находятся в положении 1. При этом обмотка возбуждения асинхронного двигателя (ОВ) запитывается непосредственно от сети напряжением
U р . ( t ) = Um i cos( ® i t + « ), (1) где U m 1 – амплитуда напряжения источника переменного тока частоты ю 1 ; а - начальная фаза напряжения источника переменного тока.
Блоки ЧД, ПБП и первый сумматор формируют постоянное напряжение, пропорциональное частоте ю 2 , которое преобразуется на выходе ПНЧ в переменное напряжение
Um2( t ) = Um 2sin(®2 t + в), где Um2, Р - амплитуда и начальная фаза выходно-
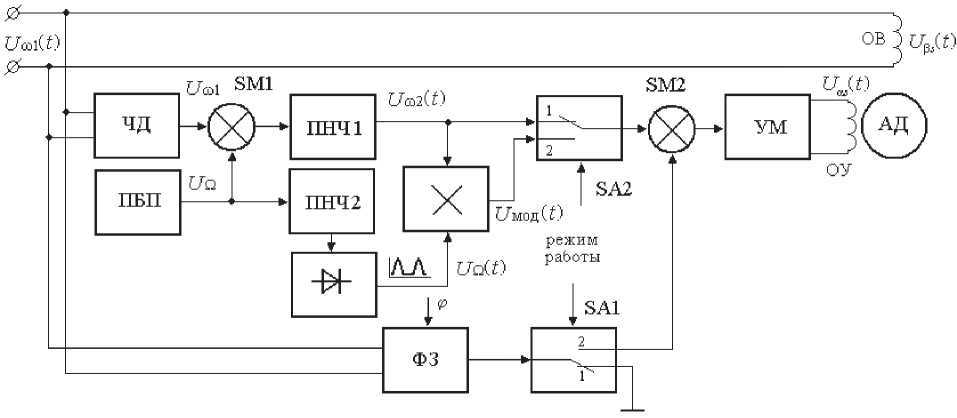
Рис. 1. Функциональная схема электропривода
го напряжения преобразователя напряжение-частота; ® 2 = w 1 + Q.
Благодаря такому подходу, при формировании частоты ю2 удается избежать влияние девиации частоты колебаний, вызванную нестабильностью частотой сети ю 1 . При этом, точность задания и поддержания частоты колебаний будет определятся только лишь стабильностью прецизионного регулируемого блока питания постоянного напряжения [7].
Усилитель мощности (УМ) усиливает входной сигнал по мощности и запитывает обмотку управления асинхронного двигателя (ОУ). В результате в воздушном зазоре АД формируется колебательное электромагнитное поле [8, 9], для ко- торого закон движения результирующего про- странственного вектора потокосцепления χ0 и его модуль Ys определяются как
X 0 = arg[ Y 5 1 = arctg
P m 2 sin^ t + Y)
P m l cos(® 1 t + 5)
P5 = mod [P^ ] =
V[Pm 1 cos(®1 t + Y)]2 + [Pm2 sin(®2 t + 5)f , где Ymi, Ym2, у , 5 - амплитудные значения и начальные фазы фазных потокосцеплений.
При формировании вращательно-колебательного режима работы электронный ключ SA1 переводится в положение 2. Тогда, сформированное на выходе ПНЧ напряжение поступает на первый вход второго сумматора и складывается в нем с выходным напряжением ФЗ:
U £ = [ U m 2 sin(® 2 t + e ) ± k l U ml sin(® 1 t + a ) ] , (2) где k 1 – коэффициент передачи фазосдвигающего звена (ФЗ).
В результате результирующий пространственный вектор потокосцепления имеет две составляющие: колебательную, от взаимодействия пото-косцеплений, вызванных напряжениями
U m 1cos( to 1 1 + a ) и U m 2 sin(®2 1 + в ), и вращательную, от взаимодействия напряжений
Um 1cos(to11 + a) и ±Um3sin(®11 + a ), где Um3=k1Um1.
В соответствие с законом изменения результирующего вектора потокосцепления
X 0 = arg^ 5 ] =
= arctg
P m 2 sin(to 2 t + Y)
P m 1 coS(to 1 t + 5)
i^ m - tg(® 1 1 + 5);
P m 1
p 5 = mod [P 5 ] = ([p m1 cos(to1 t + Y)]2 +
+ [ P m 2 sin(® 2 t + 5) ± P m 3 sin(® 1 t + Y) ] 2
подвижный элемент асинхронного двигателя начинает совершать вращательно-колебательное движение.
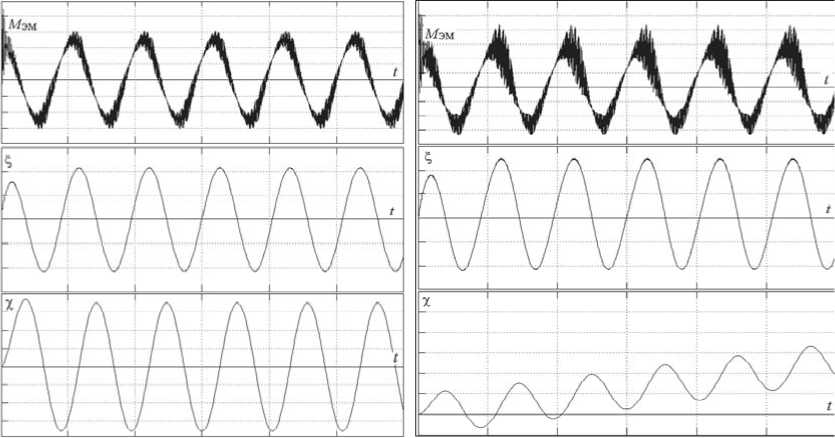
На рис. 2 представлены временные диаграммы, полученные при моделировании электропривода, выполненного на базе асинхронного электродвигателя АИР 71А2 в программной среде MATLAB, иллюстрирующие законы изменения электромагнитного момента M эм( t ), скорости ^ ( t ) и координаты χ( t ) подвижного элемента асинхронного двигателя при колебательном и вращательноколебательном режимах работы за счет фазовой модуляции питающих напряжений.
Вращательно-пульсирующий режим работы привода обеспечивается за счет переключения ключа SA2 в положение 2. При этом осуществляется прерывания напряжения обмотки управления с частотой Q в моменты времени, когда электромагнитный момент, развиваемый АД, переходит через ноль. Последнее достигается за счет преобразования постоянного напряжения U Q в напряжение переменного тока частоты Q с последующим детектированием его и перемножением на модуляторе с напряжением U в2 ( t ):
Безредукторный асинхронный привод в системах низкочастотной виброобработки металлических конструкций
а) б)
Рис. 2. Выходные характеристики АД при формировании колебательного (а) и вращательноколебательного (б) режимов работы при инерционной нагрузке и запуске на частоту О = 6 рад/с
Uмод (t) - Um О х fl 1 2-Д cos 2iОt 1
х + -sin О t —У-------M U ( t ), (3)
[ 2 2 n ^(2 i - 1)(2 i + 1)J “ 2
где U m О - амплитуда напряжения частоты пульсаций.
Оценка выходных параметров электропривода
Оценить скорость вращательной и колебательной (пульсирующей) составляющих закона движения подвижного элемента двигателя для установившегося режима работы можно на основании решения системы дифференциальных уравнений, описывающей электрическое состояние обмоток обобщенной электрической машины с учетом суммарного усилия нагрузки и функций регулирования вида (1)-(3):
и а, ( t ) = RAs + L a sdi 2^ + M a di a r ;
aas as dt dt и ia=r i + LPsdiPs. , Mpdipr .
Ups(t) Rpis+ dt + dt ’ п (n-P ; I La rdar . Ma dias
U a r ( t ) = R a r i a r + T + T-- dt dt
, - ^ ( M p i p s + L p s i p r ) ; (4)
IT -Ri + LPrdier + M P diPs ,
U p r ( t ) - R p r i ap +--T--+--T-- + dt dt
-
+ ^( M a i a s + L a si a r ) ;
M - k ( M i ipr - M рТрД^.) -эм q ^a ^a s I—* ’ f-’ s '-a r
-
- M н f j ^ dt , ^ , d -) ,
где U a s , U в s , U a r , U в r ; i a s , i p s , i a r , i p r - соответственно напряжения и фазные токи в обмотках статора и ротора по осям a и Р; ^ - обобщенная скорость подвижного элемента привода; М эм и М н - обобщённые электромагнитное усилие и нагрузка; R a s , R p s , R a r , R p r , L a s , L p s , L a r , L p r , M a , M p - электрические параметры асинхронного двигателя; kq - обобщенный силовой коэффициент.
Для этого, исходя из условия, что частота колебательной составляющей закона движения О как минимум на порядок меньше частоты питающей сети ю1, из первых четырех уравнений системы (4) определяются фазные токи и их первые производ- ные по скорости при заторможенном роторе и рассчитываются пусковая и демпфирующая состав- ляющие электромагнитного момента согласно методике [10].
Ограничиваясь линейными слагаемыми по периодической составляющей электромагнитного демпфирования Мдемп, значение вращательной ^вр и колебательной ^кол составляющих скорости элек- тропривода определяются, соответственно, как
^ вр ( t ) - :1sin C У пуск
2 R
d
^ кол ( t ) --Г dt
- 2ф - r)- еии— Sin(Yпуск- 2 ф);
2 Mдемп пуск cos(y пуск
- r ) - cos( т + Y пуск - r ) +
+ .. 1 slni 7 уск - r ) ( е - M пуск Т - 1 )
M демп где R - V1 + M^емп ; r - arctg(1 / Mдемп); т - °t;
ф, У пуск - начальные фазы закона движения подвижного элемента привода и эквивалентного пускового усилия; М пуск - амплитуда пускового усилия.
Первая гармоническая составляющая амплитуды χ m и начальная фаза колебательной составляющей закона движения электропривода с учетом
нагрузки рассчитываются как
X m
^
м пуск
О ( R мех - М демп ) V 1 + Z 2 ( « ) ’
Ф Y пуск
- arctg
Z ( О ),
Представленные выражения (5) позволяют определить условия автономности регулирования параметров колебаний по координате, скорости или усилию. Они связывают частоту колебаний О с функциями регулирования. Так, например, при отсутствии позиционной нагрузки С мех =0, что является наиболее частым случаем работы электропривода, условие автономности амплитуды колебаний при регулировании частоты О можно записать как
где комплексный коэффициент нагрузки
Z ( О ) = ( C мех — L мех О ) / R мех О ;
L мех, R мех, C мех – коэффициенты инерционного, демпфирующего и позиционного усилия нагрузки.
Как следует из выражения (5), амплитудночастотные характеристики колебательной составляющей движения привода при малом механическом демпфировании могут иметь при значении позиционной нагрузки Смех = LмехО электромеханический резонанс. Однако этот режим допустим только при формировании колебательного движения. При вращательно-колебательном режиме наличие даже незначительного C мех приводит к срыву вращательной составляющей движения и переходу к колебательному режиму работы.
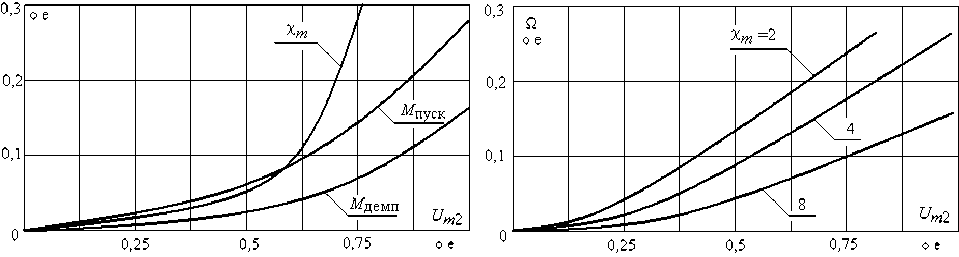
В общем случае регулирование амплитуды может осуществляться за счет изменения амплитуды выходного напряжения Um 2 преобразователя напряжение-частота (ПНЧ), воздействуя тем самым на величины М демп и М пуск. На рис. 3, а представлены законы регулирования составляющих электромагнитного момента и амплитуды колебательной составляющей движения.
Как видно, они имеют существенно нелинейный характер, вызванный периодичностью коэффициентов модели электрической машины, а также бигармоничностью функций регулирования [11].
Величину вращательной составляющей скорости регулируют за счет изменения величины коэффициента передачи фазового звена (ФЗ), а направление вращения – полярностью его фазового сдвига.
О =
^^^^^^в
( R мех
( R мех
^^^^^^в
^^^^^^в
М демп ) 2
2 L мех
М демп ) 4
4 L мех
+
м пуск
22 мех х m
Рис. 3, б иллюстрирует данные зависимости при различных заданных значениях амплитуды χm.
Установлено, что если необходимо формирователь вращательно-колебательный режим работы электропривода с, так называемой, ползучей скоростью, с помощью ФЗ напряжение на выходе ПНЧ устанавливается согласно выражению
U £ = [ U m 2 sin(® 2 t + в ) ± k 1 U m1 cos(® 1 t + а ) ] .
При этом вращательная составляющая движения подвижного элемента привода будет определяться соотношением амплитуд напряжений Um 1 и Um 3. Как показывает практика, такой режим работы является более предпочтительным в электроприводах, предназначенных для виброобработки сварных изделий.
Заключение
Проведенные исследования показали, что использование безредукторного асинхронного электропривода в системах низкочастотной виброобработки металлических конструкций позволяет существенно повысить сопротивления усталости сварных соединений, и тем самым улучшить эксплуатационную надежность сварной конструкции. Разработанный электропривод позволяет форми-
а)
б)
Рис. 3. Законы регулирования пусковой и демпфирующей составляющих электромагнитного момента и амплитуды колебаний (а), условия автономности регулирования амплитуды колебаний (б) при заданных значениях χ m
Безредукторный асинхронный привод в системах низкочастотной виброобработки металлических конструкций ровать требуемые режимы работы с обеспечением плавного регулирования «на ходу» выходных параметров движения.
Следует отметить, что рассмотренная функциональная схема электропривода и полученные выражения для выходных характеристик справедливы как для двигателей углового, так и линейного движения. Различие состоит лишь в том, что при расчетах системы уравнений (4) силовой коэффициент для угловых колебаний kq = 1, а для линейных – k q = π/τ p , где τ – полюсное деление, p – число пар полюсов асинхронного двигателя.
Список литературы Безредукторный асинхронный привод в системах низкочастотной виброобработки металлических конструкций
- Панкратов, А.И. Автоматизация процесса релаксационной виброобработки деталей горных машин/А.И. Панкратов, А.И. Шеремет//Сборник трудов Международной НТК «Горная энергомеханика и автоматика». -Донецк: ДонНТУ, 2003. -С. 152-157.
- Бабичев, А.П. Основы вибрационной технологии/А.П. Бабичев, И.А. Бабичев. -Ростов н/Д.: Издат. центр ДГТУ, 2008. -694 с.
- Edson, О.A. Rotating are butt welding of thin walled tube/О.A. Edson, S.В. King//W1 Research Bulletin. -1981. -No. 1. -P. 17-22.
- Goo Good Vibrations Streets-Relieve Welds//Welding Design and Fabrication. -1985. -No. 9. -P. 22-24.
- Луковников, В.И. Электропривод колебательного движения/В.И. Луковников. -М.: Энергоатомиздат, 1984. -152 с.
- Пат. 2592080 Российская Федерация, МПК H02P25/02. Электропривод колебательно-вращательного движения/А.В. Аристов, И.А. Эккерт. -Опубл. 20.07.16, Бюл. № 20.
- А.с. 1775835 СССР, МКИ Н02Р7/62. Электропривод колебательного движения/А.В. Аристов, И.Л. Плодистый, А.А. Тимофеев, Д.Ю. Щербенко. -№ 4864803/07; заявл. 06.09.90; опубл. 15.11.1992, Бюл. № 42.
- Аристов, А.В. Предельные характеристики оптико-механических систем со сканированием/А.В. Аристов, Л.И. Аристова//Вестник Южно-Уральского государственного университета. Энергетика. -2015. -Т. 15, № 1. -С. 41-45 DOI: 10.14529/power150105
- Петров, И.И. Специальные режимы работы асинхронного электропривода/И.И. Петров, А.М. Мейстель. -М.: Энергия, 1968. -264 с.
- Аристов, А.В. Электропривод колебательного движения с машиной двойного питания/А.В. Аристов. -Томск: Изд-во ТПУ, 2000. -176 с.
- Пантелеев, В.И. Исполнительный электропривод с индукторным двигателем двойного питания/В.И. Пантелеев, Б.П. Соустин, В.А. Загуба. -Красноярск: Изд-во Краснояр. ун-та, 1990. -184 с.
