Биомеханика ходьбы в норме и при наличии протеза ноги с использованием комплекса XSENS

Автор: Эрлих В.В., Епишев В.В., Сапожников С.Б.
Журнал: Человек. Спорт. Медицина @hsm-susu
Рубрика: Восстановительная и спортивная медицина
Статья в выпуске: 4 т.23, 2023 года.
Бесплатный доступ
Цель: сравнительная оценка кинематики движений человека с протезом и без протеза с использованием компьютерного комплекса захвата движений.
Биомеханика, кинематика, протез, ходьба, xsens
Короткий адрес: https://sciup.org/147242701
IDR: 147242701 | УДК: 796.012.412.4 | DOI: 10.14529/hsm230418
Gait biomechanics in normal conditions and with a lower-extremity prosthesis captured by the XSENS system
Aim. To compare kinematics between normal conditions and a lower-extremity prosthesis by using the Xsens motion capture system.
Текст научной статьи Биомеханика ходьбы в норме и при наличии протеза ноги с использованием комплекса XSENS
Введение. Биомеханика движений человека широко изучается в научной литературе применительно к различным условиям: ходьбе по неровной поверхности, по снегу, бегу, прыжкам, при выполнении типовых движений у спортсменов и военнослужащих [1–6]. Анализ движений людей при наличии протезов представляет собой отдельное научное направление, связанное, как правило, с реабилитацией после тяжёлых травм [1, 4]. Движения людей в норме существенно отличны от движений с протезами, так как протезы не обладают источниками энергии и механизмами для силового поворота соседних сегментов. Современные протезы колена или стопы [11, 14] оснащают системой сенсоров, микропроцессором для управления лишь жёсткостью в суставах и демпфированием при сгибе или распрямлении, а также элементами искусственного интеллекта. Следует заметить, что такие протезы сложны в обслуживании и настройке и весьма дороги. Большее распространение получили настраиваемые на определённые движения механические протезы [12–14].
Очевидно, что первоочередным требованием к протезу ноги, в частности, относится обеспечение самостоятельных перемещений: ходьбы по ровной поверхности с умеренной скоростью (до 2–3 км/ч). Более сложными движениями считаются посадка и подъём со стула, движение по ступеням вверх и вниз, движение по поверхности с неровностями, бег, прыжки и т. п.
Протезы, выпускаемые в мире, имеют определённые пределы по нагрузке, амплитуде движений, отличаются массой и размерами, а также материалами, из которых они изготовлены (алюминиевые сплавы, титан, стали, стекло- и углепластики, полиуретан и др.) [9–11, 13, 14].
Существенной проблемой для человека при обеспечении необходимой эргономики движений является настройка протеза. Даже при подгонке длины и углов ориентации частей нового протеза специалистами протезноортопедических предприятий это занимает длительное время и зачастую требует итераций. Более того, в процессе эксплуатации мягкие ткани культи могут деформироваться, и реальная длина протезированной конечности уменьшается, что приводит к ходьбе с заметной хромотой, к увеличению энергозатрат на движение (увеличение амплитуды колебаний центра тяжести). Как и какими средствами это можно оперативно оценить – актуальная проблема, практически не освещённая в литературе [2].
В настоящей работе рассмотрено применение компьютерного комплекса захвата движений Xsens [12] с использованием внешних датчиков, регистрирующих положение, линейные и угловые скорости и ускорения в местах их установки на теле человека.
Цель исследования – сравнительная оценка кинематики движений человека с протезом и без протеза с использованием компьютерного комплекса захвата движений.
Материалы и методы. Исследование проводилось с использованием компьютерного комплекса захвата движений Xsens. Комплекс состоит из аппаратной и программной части. К аппаратной относятся: костюм и эла- стичные ремни для крепления до 34 автономных радиосенсоров (рис. 1) вместе с приёмным модулем Awinda Station. Программное обеспечение Motion Tracking Manager Software работает под Windows и может фиксировать трёхмерную ориентацию модели человека, данные сенсоров и их экспорт в виде ASCII-файлов для последующего анализа.

Рис. 1. Костюм, эластичные ремни и сенсор (размеры 47×30×13 мм, вес 16 г) Fig. 1. Xsens motion capture suit, elastic bands, and a sensor (dimensions: 47×30×13 mm, 16 g)
Перед проведением кинезиметрии в систему необходимо ввести ряд параметров испытуемого: рост, вес, охват талии, ширину плеч и т. п. Для калибровки сенсоров комплекса рекомендуется записать положение человека стоя, а также в процессе ходьбы по ровной поверхности с разворотом и ходьбой в обратном направлении. После успешной калибровки возможны любые изменения положения человека в радиусе 50 м от приёмного модуля.
В экспериментах на тело человека были установлены 17 сенсоров (рис. 2) на следующих сегментах: голова (1), лопатки (2), шея (1), таз (1), плечи (2), предплечья (2), кисти (2), бёдра (2), голени (2), стопы (2).
На основании введён н ых массо-геометрических данных по конкретному человеку ПО комплекс Xsens рассчитывает положения сенсоров на сегментах, длины сегментов и координаты суставов, используя статистические параметры, внесённые пр о изводител е м в базу данных комплекса. Это позволяет определять не только параметры движения то ч ек установки сенсоров, но и вычислять угл ы поворота в суставах, угловые ускорения сегментов, положение центра массы тела и др. [5, 12].
В таблице приведены обозначения сенсоров в выходном файле Xsens.
Сравнительная оценка ходьба со скоростью 3 км/ч на расстояние 100 м проводилась на беговой дорожке Life Fitness в научноисследовательском центр е спортивн о й науки ЮУрГУ. В исследовани и приняли участие 2 добровольца, схожих по антропометрическим данным: № 1 – здоровый доброволец (масса тела 78,1 кг), № 2 – доброволец с ампутированной левой нижн е й конечно с тью на уровне верхней 1/3 бедра (масса тела без протеза 67 кг) (рис. 3). Для косвенного определения энергетической стоимости ходьбы проводилось измерение ЧСС до ходьбы и сразу пос л е.
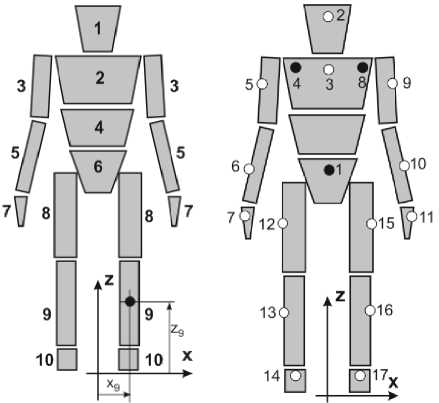
Рис. 2. Схематизация человека по сегментам с местами установки сенсоров и стандартная таблица весов сегментов в норме
Fig. 2. Body segments with sensor placement and reference values for segmental weights
|
сегмент |
% |
число |
итог % |
|
1 |
6,93 |
1 |
6,93 |
|
2 |
15,55 |
1 |
15,55 |
|
3 |
2,70 |
2 |
5,40 |
|
4 |
16,30 |
1 |
16,30 |
|
5 |
1,70 |
2 |
3,40 |
|
6 |
11,18 |
1 |
11,18 |
|
7 |
0,61 |
2 |
1,22 |
|
8 |
14,30 |
2 |
28,60 |
|
9 |
4,33 |
2 |
8,66 |
|
10 |
1,38 |
2 |
2,76 |
|
сумма: |
100,00 |
Обозначения сенсоров в комплексе Xsens Xsens sensor legend
|
1 |
Таз (pelvis) |
10 |
Левое предплечье (left lower arm) |
|
2 |
Голова (head) |
11 |
Левая кисть (left hand) |
|
3 |
Шея (neck) |
12 |
Правое бедро (right upper leg) |
|
4 |
Правая лопатка (right shoulder) |
13 |
Правая голень (right lower leg) |
|
5 |
Правое плечо (right upper arm) |
14 |
Правая стопа (right foot) |
|
6 |
Правое предплечье (right lower arm) |
15 |
Левое бедро (left upper leg) |
|
7 |
Правая кисть (right hand) |
16 |
Левая голень (left lower leg) |
|
8 |
Левая лопатка (left shoulder) |
17 |
Левая стопа (left foot) |
|
9 |
Левое плечо (left upper arm) |
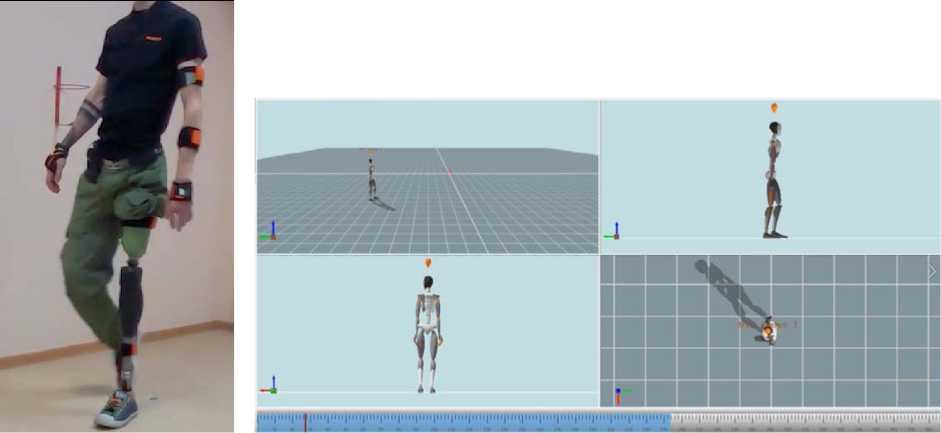
Рис. 3. Пример исследования добровольца № 2 с использованием комплекса Xsens
Fig. 3. Motion capture with the Xsens system for volunteer 2
Результаты. Обработка результатов осуществлялась по разработанной методике обработки данных. После проведения исследования в системе Xsens был сформирован файл *.xlsx, данные которого далее анализируются в пакете Excel. На рис. 4 приведены фрагменты соответствующих страниц.
Отметим, что положение сенсоров определяется в системе координат принимающей станции. Шаг между записями (колонка Frame) составляет 1/60 с.
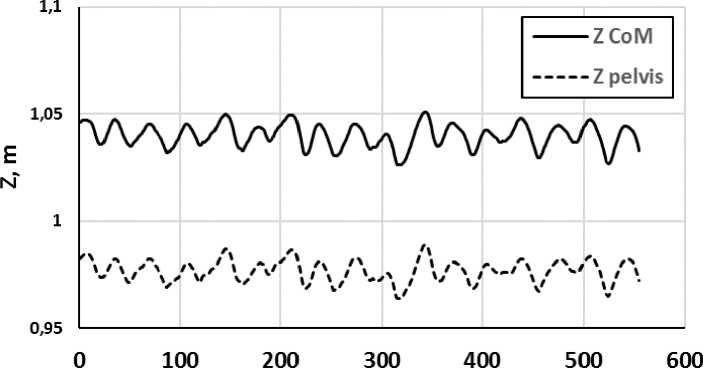
Для примера методических особенностей измерений на рис. 5 показаны графики изменения расчётного положения центра тяжести человека (ЦТ – center of mass – CoM) и сенсора, установленного на тазе (pelvis).
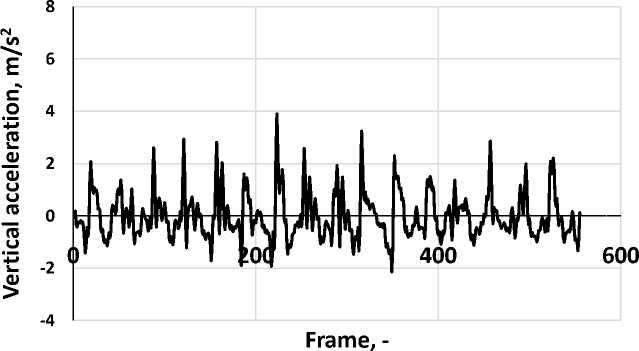
Можно заметить практически полное их совпадение со сдвигом на 63 мм (ЦТ выше). Вертикальное ускорение ЦТ a ( t ) можно получить с использованием двойного численного дифференцирования координаты Z ( t ) (рис. 6):
a ( t ) = dV ( t ) / dt , V ( t ) = dZ ( t ) / dt , dZ i +1 ≈ Z i +1 – Z i , dt = 1/60 c, dV i +1 ≈ V i +1 – V i , i – номер кадра.
Можно заметить, что графики на рис. 6 а, б качественно совпадают, а количественно – отличаются в 1,75 раза. Максимальное расчётное ускорение ЦТ существенно ниже реального для тазовых костей (4 и 7 м/с2).
В итоге использование сенсора pelvis намного предпочтительнее вычисления положения ЦТ, так как в случае pelvis система рассчитывает и скорости, и ускорения на аппаратном уровне. Добавим, что получить вертикальную реакцию Rz тела человека в любой момент времени t на опорную поверхность (рис. 6) можно, просуммировав вклады инерционных составляющих всех сегментов тела:
Rz(t) = Mg +Il1 t=i miazi(t). (1) Здесь M – масса тела, g – ускорение свободного падения, m i – масса i -го сегмента (см. таблицу на рис. 2), a zi – вертикальное ускорение i -го сегмента.
Segment position (положение сегментов)
Frsme Pelvis х Pevsy Pelvis z Necxx Necxy Necxz Headx Heady Headz 0 0,98127 -2,848 0,982385 0,981333 -234049 1,548216 0378079 -231194 1,63003
-
1 0390563 -23472 0382117 0,980378 -2 3387 1,548235 0376598 -2,80993 1,629994
-
2 0379855 -234639 0382149 0378363 -2Д369 1,548253 0375117 -2,30805 1,-29953
-
3 0379068 -234556 0382156 0377475 -2,83505 1,548242 4973578 -2,30605 1,629892
-
4 0378167 -234469 0382122 0,975933 -233312 1,543186 0371971 -230398 1,62973
Segment "velocity (скорость сегментов)
|
F’ame Ре vs х |
Pehtsy |
Pelvis z |
Necxx Necxy Necxz Headx Heady |
Headz |
|
0 -0,0541 0,041551 |
4005639 |
0 0 0 -0,08612 0,137371 |
-0,03375 |
|
|
1 -405601 0,042254 2 -0,05793 0,042$6 |
4004551 4003ч2 |
-4OII79 40234 -0,00268 -0,09093 0,143829 -0,02359 40468 -0,00536 -0,09574 0,143788 |
-0,03354 41,03332 |
|
|
3 -0,06043 0,0434® 4 -406405 QO43332 |
400283 0,003087 |
-0,03602 0,066572 -0,00719 -0,10X8 0,146762 -0,05041 0,080904 -0,00747 -0,1(594 0,149886 |
■40331 403303 |
|
Segment acceleration (ускорения сегментов)
Freme Pelvisx Pevisy Pelvisz Necxx Necxy Necxz Headx Heady Headz
-
0 -0,15129 0,096358 0,042045 -0,26181 0,168023 404896 -0,2548 0,134515 0,009993
-
1 -0,15823 -0,12297 -0,06353 -0,2603 0,15764 0,019992 -0,28135 0,199501 0,054796
-
2 -0,13138 0,054371 407062 -0,287 0,185526 -0,04356 -0,28219 0,145237 -0,01773
-
3 -0,10313 0,225771 -0,03357 -0,29656 0,2186 -0,06645 -436755 0,19723 0,000315
-
4 -0,19006 0,184334 0,026988 -0,33891 0,193438 -0,03775 -0,3353c 0,237213 -0,04094
Segment angular velocity (угловые скорости сегментов)
Р'атк Pevisx Pevisy Pevisz Necxx Necxy Necxz Headx Heady Headz
0 -0,06655 -0,01939 0,026774
1 -0,0967 -0,02116 0,030639
2 -0,09115 -0,02778 0,03028
3 407754 403324 4028368
-сдзое 4091® -409352 409335
0,01327 0,040009 -0,03915 0,013647 0,037152
0,01284 0,043717 -0,02862 0,014632 0,036698
0,01389 0,037081 -0,02816 0,010556 0,032382
0,01566 0,036996 -0,02297 0,012504 0,031715
Segment angular acceleration (угловые ускорения сегментов)
Frane PeMsx Pevisy Pelvisz Neckx Neck у Neckz Headx Heady Headz
а а а о а а о о о a
-
1 -1,20906 410624 0^31864 -0,0506 402565 0,04244 0,631992 0,059128 -0,02725
-
2 4-^6676 -0^9753 -0,02149 -0,12157 406259 -0,21816 4027096 42^57 425896
-
3 0^1616 2 432749 -411475 000 0311885 0,11687 -0,04004
-
4 0,447579 0,10348 0,705739 414742 0,12427 -0,16884 0,044862 -0,0658 0,00705
4-ЖЖ of mass (положение центра тяжести)
F-ате CaMx СаМу CcMz
О 4985526 -484747 1^39383
1 4984654 -484655 1Д39425 2 0,983783 -2,84562 1,039467 3 4982857 -484466 1Д39484 4 4981857 -484364 1.0 39ч
Рис. 4. Фрагменты записей в файл данных исследований с использованием комплекса Xsens
Fig. 4. Study records obtained with the Xsens system
Frame, -
Рис. 5. Изменение положения ЦТ и сенсора, установленного на тазе Fig. 5. Changes in CoM and pelvis sensor
а)
v>
О га ф ф
го го
щ
-2
б)
-4
Frame, -
Рис. 6. Ускорения ЦТ (а) и таза (б) в процессе ходьбы Fig. 6. CoM (а) and pelvis (б) accelerations during walking
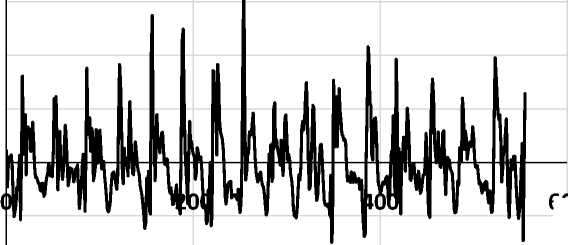
Зависимость R z ( t ) полезна при определении нагрузки на голеностопные суставы при движении человека в норме или после протезирования (рис. 7).
Вариация усилия на беговую дорожку связана, очевидно, с непривычной обстановкой, не позволяющей вестибулярному аппарату человека нормально работать из-за движения опорной поверхности при покое окружающих предметов.
Для оценки «качества» движения в норме и с протезом рассмотрим изменение вертикальной координаты тазового сенсора pelvis при ходьбе на тредбане с постоянной скоростью (3 км/ч) и соответствующего вертикального ускорения (рис. 8, 9).
Из рис. 8, 9 видно, что кинезиметрия человека в норме и с протезом ноги существенно отличается. У добровольца 1 анализ данных Xsens показывает, что за время 9,283 с сделано 557 кадров (скорость съёмки 60 кадров в секунду). Пройденное расстояние S = = 7,736 м, средняя длина шага l = 0,833 м, частота ходьбы f = 1,83 Гц, колебания таза в среднем составили 2,5 см. Вертикальные ускорения таза a(t) варьировались в диапазоне –3…7 м/с2 (в дополнение к ускорению силы тяжести g = 9,86 м/с2).
У добровольца 2 при ходьбе на т редбане со скоростью 3 км/ч колебания таза в среднем составили 3,5 см, вертикальные ускорения таза варьировались в диапазоне –2…11 м/с2. Установлено увеличение дли н ы шага при росте амплитуды вертикальных колебаний таза на 28,5 % и повышение амплитуды ве р тикальных ускорений таза: у добровольца 1 варьировалось в диапазоне 10 м/с2, у доб р овольца 2–13 м/с2. Можно утверждать, что добровольцу с протезом пришлось затратить существенно большее количество энергии на движение.
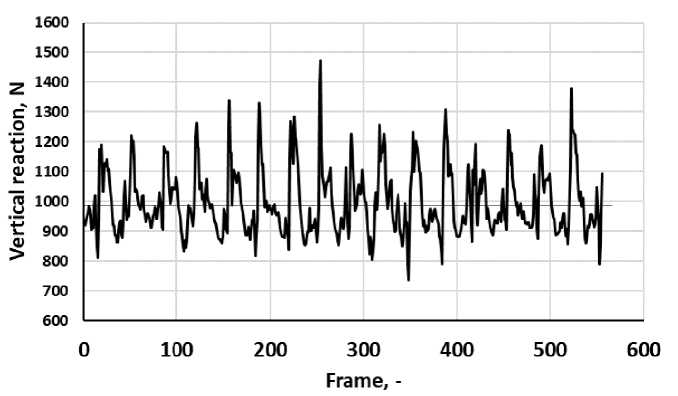
Рис. 7. Вертикальное усилие на поверхность беговой дорожки при ходьбе. Горизонтальная линия – вес тела человека
Fig. 7. Vertical reaction on treadmill surface during walking.
The horizontal line stands for body weight
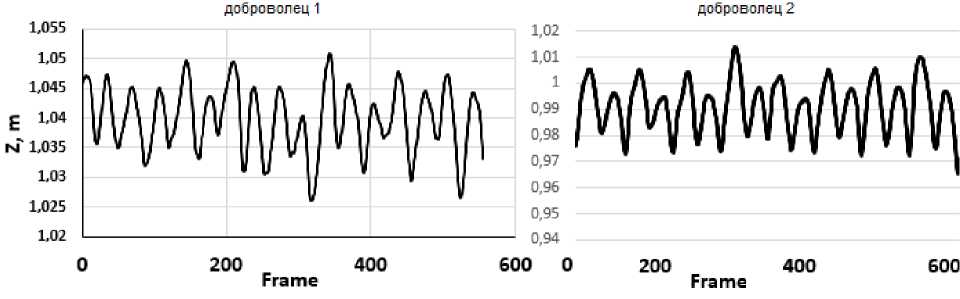
Рис. 8. Положение центра тяжести тазового сенсора при ходьбе со скоростью 3 км/ч у добровольцев Fig. 8. CoM location of the pelvis sensor when walking with a speed of 3 km/h
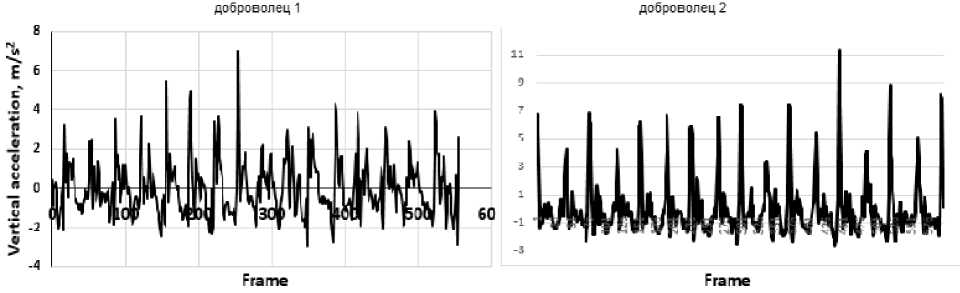
Рис. 9. Вертикальное ускорение тазового сенсора при ходьбе со скоростью 3 км/час у добровольцев Fig. 9. Vertical acceleration of the pelvis sensor when walking with a speed of 3 km/h
Измерение частоты сердечных сокращений также является подтверждением: у добровольца без протеза ЧСС до ходьбы 100 м составила 84 уд./мин, после – 84 уд./мин; у добровольца с протезом ЧСС до ходьбы 100 м 74 уд./мин., после – 96 уд./мин.
Заключение. В работе проведена кине-зиметрия ходьбы на комплексе Xsense двух добровольцев со схожими антропометрическими данными и отличающимися состоянием нижней конечности: с протезом и без него. В комплексе Xsense установленные на человека сенсоры позволяют с частотой 60 Гц регистрировать их положение, скорости и ускорения в трёх измерениях в процессе движений. На основе этих данных, а также расчётных массовых параметров сегментов тел разработана методика и определены максимальные усилия в точках контакта с поверхностью беговой дорожки, а также энергетические затраты на движение по изменению пульса. Показано, что движение с протезом требует больших энергозатрат, так как связано с большим изменением положения центра масс и большими амплитудами колебаний тела по сравнению с теми же характеристиками здорового человека. Поскольку ЦТ расположен в зоне таза, для повышения оперативности отмеченных выше измерений для будущих исследований предлагается использовать тазовый сенсор (pelvis). В этом случае не потребуется численное дифференцирование, так как система Xsens это делает на аппаратном уровне для всех сегментов тела человека.
Авторы также признательны Ф.В. Мер-кульеву за возможность проведения экспериментов на протезированной конечности.
Список литературы Биомеханика ходьбы в норме и при наличии протеза ноги с использованием комплекса XSENS
- Белянин, О.Л. Биомеханика ходьбы инвалидов при коротких культях бедер на усовершенствованных протезах / О.Л. Белянин, Л.М. Смирнова, И.М. Беляев // Вестник гильдии протезистов-ортопедов. – 2003. – № 2. – С. 18–24.
- Григоренко, Д.Н. Анализ кинематических параметров движений в упражнении «подъем по штурмовой лестнице на четвертый этаж учебной башни» / Д.Н. Григоренко, К.К. Бондаренко, С.В. Шилько // Рос. журнал биомеханики. – 2012. – Т. 16, № 2 (56). – С. 95–106.
- Кручинин, П.А. Об использовании свойств решений оптимальных механических задач при оценке эффективности движений человека. Материалы Всероссийской научно-практической конференции по вопросам спортивной науки в детско-юношеском спорте и спорте высших / П.А. Кручинин. – М.: ГКУ «ЦСТиСК» Москомспорта, 2016. – С. 189–195.
- Рукина, Н.Н. Особенности биомеханических характеристик опороспособности и походки у пациентов с экзопротезом нижней конечности / Н.Н. Рукина, А.Н. Кузнецов, А.Н. Белова // Рос. журнал биомеханики. – 2014. – Т. 18, № 3 (65). – С. 389–397.
- Ципин, Л.Л. Анализ движения общего центра масс легкоатлетов-спринтеров при старте / Л.Л. Ципин, М.А. Самсонов // Рос. журнал биомеханики. – 2013. – Т. 17, № 3 (61). – С. 122–130.
- Brave steps to the future. https://kinez.ru/en.
- Freedom Innovations Portfolio. https://us.proteor.com/freedom-innovations-portfolio.
- Looney, D.P. Metabolic Costs of Military Load Carriage over Complex Terrain / D.P. Looney // Military Medicine. – 2018. – Vol. 183. – P. 357–362.
- MTw Awinda. – https:/www.movella.com/products/wearables/xsens-mtw-awinda.
- Pandolf, K.B. Metabolic energy expenditure and terrain coefficients for walking on snow / K.B. Pandolf, M.F. Haisman, R.F. Goldman // Ergonomics. – 1976. – Vol. 19. – Р. 683–690.
- Products and services from Ottobock. https:/www.ottobock.com.
- The Most Advanced Lower Limb Prosthetics in the World– https:/www.blatchfordmobility.com.
- Voloshina, A.S. Biomechanics and energetics of walking on uneven terrain / A.S. Voloshina, A.D. Kuo, M.A. Daley // Journal Experimental Biology. – 2013. – Vol. 216. – Р. 3963–3970.
- Welfare Equipment. www.nabtesco.com/en/products/welfare.html.
