Боковая поверхность зуба цилиндрических зубчатых колес

Автор: Браилов И.Г., Андросов С.П., Адмаев С.С.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение
Статья в выпуске: 1-2 т.12, 2010 года.
Бесплатный доступ
В работе определены зависимости, выраженные векторными функциями, описывающие боковые эвольвентные поверхности прямозубых и косозубых зубьев цилиндрических зубчатых колес.
Зубчатое колесо, эвольвента, поверхность зуба, векторная функция
Короткий адрес: https://sciup.org/148198930
IDR: 148198930 | УДК: 621.833
Lateral area of gear teeth of cylindrical gearwheels
In the work dependences expressed by vector functions, describing the side involute surfaces of spur and helical cylindrical gearwheels are certain.
Текст научной статьи Боковая поверхность зуба цилиндрических зубчатых колес
соединяющей эвольвентную поверхность с поверхностью впадин.
Боковая поверхность прямого зуба представляет собой цилиндрическую эвольвентную поверхность. Для косого зуба боковая поверхность является винтовой эвольвентной поверхностью. В общем случае эту поверхность можно рассматривать в двух параметрических направлениях. Первое направление представляет собой перемещение по эвольвентному профилю зуба в его торцевом сечении. Второе направление определяется прямолинейным перемещением эвольвенты вдоль оси зубчатого колеса для прямозубых колес и винтовым перемещением – для косозубых колес. В координатной форме векторная функция эвольвенты записывается в следующем виде [3]:
Rb sin ф
rэ
Rb С^ф +
- R b ф cos ф R b ф sin ф
где R b – радиус основной окружности зубчатого колеса; φ – угол развернутости эвольвенты (рис. 1). Точка M 1 на боковой поверхности прямого зуба описывается вектором
r = r + r
э см
где r cм – вектор смещения по оси OZ .
В координатной форме вектор r запишется:
|
" R b |
sin ф |
"- R b |
ф cos ф |
■ 0 " |
||||
|
r = |
Rb |
cos ф |
+ |
Rb |
ф sin ф |
+ |
0 |
|
|
0 _ |
V |
0 _ |
_- Vt _ |
, (3) |
||||
где V – скорость перемещения конца вектора r вдоль оси OZ ; t – время перемещения.
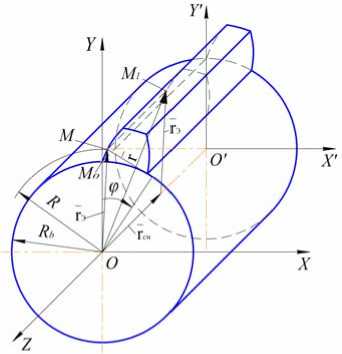
Рис. 1. Боковая поверхность прямого зуба
Зубья косозубого колеса в торцевом сечении имеют эвольвентный профиль. При этом на любом радиусе колеса совокупность точек, принадлежащих боковой поверхности зуба, в направлении его оси, образует винтовую линию. Другими словами, каждая точка эвольвенты при движении вдоль оси косозубого колеса совершает винтовое движение (рис. 2).
Винтовая линия на основном цилиндре зубчатого колеса радиуса R b определяется формулой
Rb sin T1
r = R b cos О
— a ф1
где φ 1 – угол поворота проекции вектора r на плоскость XOY ; a – параметр, характеризующий движение по винтовой линии вдоль оси колеса OZ .
Текущий параметрический угол φ 1 изменяется от своего нулевого значения, до значения φ 1 max , которое он принимает на тыльном торцевом сечении (рис. 2). Величина φ1 max зависит от значений угла наклона β b линии зуба к оси колеса и ширины зубчатого венца b . В выражении ( 4 ) максимальное значение координаты вектора r по оси OZ в принятой системе равняется по модулю ширине зубчатого венца
I— a ф, I = b г 1max
Длина дуги M′0M′′0 (рис. 2) равняется, с одной стороны b tg βb , а с другой – Rb φ1max , то есть можно записать:
М0М0' = btgpb = Rb т . (6)
Из формулы (6) находится максимальное значение угла поворота φ 1 :
b
T1 max = — Wb Rb
.
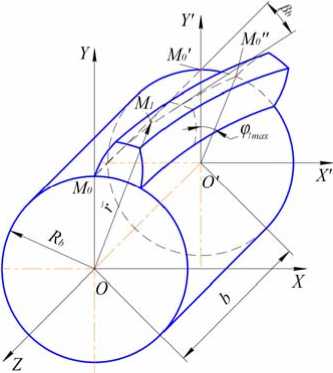
Рис. 2. Боковая поверхность косого зуба
С учетом выражения (7) параметр a определяется соотношением b = V = Rb срл co teB, т 1 max g b где ω – угловая скорость вращения проекции вектора r на плоскость XOY вокруг оси OZ.
Положение любой точки на эвольвентном профиле прямого зуба колеса определяется значением угла развернутости эвольвенты φ (рис. 1). Радиус R изменяется от значения радиуса R b основного цилиндра до значения радиуса R a цилиндра вершин зубьев колеса. Радиус R определяется как модуль векторной функции эвольвенты (1) и записывается выражением
R = R b 4v+T
Соответственно текущее значение угла φ определяется по формуле т =
f pA 2
( R ; 1
— 1
Для косого зуба необходимо дополни- тельно учитывать, что каждая точка его эволь-вентного профиля все время поворачивается в плоскости XOY относительно оси OZ на величину текущего угла φ1. Поэтому после вычисления координат точки эвольвенты в любом ее положении необходимо найденный вектор повернуть на угол φ1 путем умножения его на матрицу поворота [M]. В результате в общем виде векторная функция винтовой эвольвентной поверхности косого зуба колеса запишется:
r = [ M ] ( Гэ + Гсм )
Или в координатной форме
|
cos ф 1 |
sin ф 1 |
0 " |
|
|
r = |
- sin Ф 1 |
COS ф 1 |
0 |
|
. 0 |
0 |
1 _ |
|
( |
" R b sin ф" |
- R b ф cos ф |
_ 0 " |
^ |
||
|
R b cos ф |
. + |
R b ф sin ф |
+ |
0 |
||
|
V |
_ 0 _ |
_ 0 . |
" «ф 1 . |
7 |
С учетом преобразований выражения (12) векторная функция боковой эвольвентной поверхности зуба косозубого колеса окончательно опишется формулой
Rb (sin (ф + Ф1)- ф cos(ф + Ф1))
r = - Rb (cos(ф + Ф1) + фsin (ф + Ф1))
- а ф 1
В результате вектор r , восстановленный в точку M 1 винтовой эвольвентной поверхности (рис. 2), имеет относительно вектора эвольвенты два аффинных преобразования: поступательное перемещение вдоль оси зубчатого колеса и поворот относительно этой оси.
Выводы: запись эвольвентной поверхности зубчатых колес в координатной форме позволяет любые пространственные преобразования. Используя пространственное описание поверхностей зубчатых колес, можно моделировать сложные многопараметрические и многофункциональные процессы зубообработки, а также различные эксплуатационные и технологические процессы. Например, возможен расчет пятна контакта при взаимодействии сопряженных зубьев колес. Кроме этого, рассмотрение зубьев колес в пространственном отображении дает возможность определить их бочкообраз-ность, а также погрешности, возникающие при зубообработке.
Список литературы Боковая поверхность зуба цилиндрических зубчатых колес
- Гавриленко, В.А. Основы теории эвольвентной зубчатой передачи. -М.: Машиностроение, 1969. -432 с.
- Браилов, И.Г. К вопросу моделирования зубофрезерования/И.Г. Браилов, С.П. Андросов//Наука и производство-2009: материалы Международ. науч. -практ. конф. в 2 ч. -Брянск: БГТУ, 2009. -Ч. 2. -С. 16-18.
- Браилов, И.Г. Описание эвольвенты векторной функцией, выраженной в параметрах станочных систем/И.Г. Браилов, С.П. Андросов//Проблемы механики современных машин: материалы четвертой Международной научно -практической конференции в 3 т. -Улан-Удэ: ВСГТУ, 2009. -Т. 2. -С. 11-14.
