Быстродействующие импульсные стабилизаторы напряжения с модульным принципом построения и дискретным управлением

Автор: Краснобаев Ю.В., Капулин Д.В., Гончарук Д.В.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 3 т.5, 2012 года.
Бесплатный доступ
Рассмотрен дискретный закон управления импульсным стабилизатором напряжения понижающего типа с модульным принципом построения. Предложен вариант реализации закона управления при формировании дискретного управляющего сигнала микроконтроллером. Приведены результаты исследования макетов импульсного стабилизатора напряжения, выполненного на основе одного и двух силовых модулей, каждый из которых имеет микроконтроллерное устройство управления. Показано достижение астатизма выходного напряжения и малой длительности переходных процессов в стабилизаторах.
Быстродействующий импульсный стабилизатор напряжения, силовой модуль, цифровое управление
Короткий адрес: https://sciup.org/146114654
IDR: 146114654 | УДК: 621.314
Quick-switching voltage regulator with modular principle and discrete control
A discrete principle control for step-down switching converter with modular construction is considered. An embodiment of the principle control at digital control signal by microcontroller is proposed. The results of researches for models of switching converters, made on the one or pare power modules, each of which has a microcontroller control unit are given. An astatism achieve for output voltage and short duration transients in converters are given.
Текст научной статьи Быстродействующие импульсные стабилизаторы напряжения с модульным принципом построения и дискретным управлением
Энергопреобразующая аппаратура (ЭПА) систем электропитания (СЭП) спутников связи, навигации и геодезии создается на основе импульсных стабилизаторов напряжения (ИСН). В мощных СЭП применяются ИСН, выполненные на основе параллельно включенных силовых модулей (СМ). Это позволяет улучшить массогабаритные характеристики ЭПА, повысить ее надежность и снизить уровень электромагнитных помех, связанных с импульсным режимом работы ИСН. Для удовлетворения возрастающих требований со стороны потребителей электроэнергии к стабильности питающего напряжения в динамических и статических режимах работы и увеличению гарантийного срока работы ЭПА и СЭП в целом разработчики ИСН
осуществляют синтез более совершенных законов управления и решают вопросы по схемотехнической реализации найденных законов управления [1].
При синтезе таких законов управления решаются задачи по обеспечению заданных требований по стабильности выходного напряжения и уровню выходного импеданса ИСН с учетом заданного срока функционирования спутников, а соответственно с учетом деградационного изменения параметров силовых цепей и устройств управления ИСН. Схемотехническая реализация таких более совершенных и сложных законов управления ИСН на основе дискретных элементов и микросхем малой степени интеграции приводит к увеличению массы и габаритов устройств управления (УУ), повышению их собственного энергопотребления и снижению надежности работы, что в конечном итоге ухудшает характеристики ЭПА. В связи с этим актуальна работа, направленная на применение в устройствах управления СМ микросхем высокой степени интеграции, например микроконтроллеров.
В устройствах управления ИСН на протяжении длительного времени находят применение микроконтроллеры, выполняющие сервисные, контрольные и вспомогательные функции [2–4]:
-
• включение ИСН с обеспечением режима ограничения пускового тока;
-
• отключение ИСН при возникновении нештатных ситуаций;
-
• очередность подачи питающих напряжений на несколько выходов ИСН;
-
• взаимная синхронизация нескольких силовых модулей ИСН;
-
• диагностика работоспособности отдельных силовых модулей ИСН;
-
• включение устройств охлаждения;
-
• управление уровнями стабилизируемого выходного напряжения и токоограничения;
-
• регистрация нештатных ситуаций и сбоев в работе.
В последние годы предпринимаются попытки задействовать микроконтроллер для выполнения не только сервисных, контрольных и вспомогательных функций, но и функций по стабилизации выходного напряжения ИСН [5]. Поэтому возникает задача по разработке новых или адаптации известных законов управления силовыми модулями ИСН, исходя из минимизации количества процедур оцифровывания входных информационных сигналов за период преобразования энергии в силовом модуле, использования простых и экономичных по времени расчетных процедур при обработке входных информационных сигналов для формирования выходного импульсного сигнала управления силовым ключом СМ. При этом полученные законы управления должны обеспечивать реализацию оговоренных выше требований по возможности увеличения выходной мощности ИСН за счет увеличения числа параллельно включенных СМ, повышения стабильности выходного напряжения в динамических и статических режимах работы и увеличения гарантированного срока работы.
Методы исследования
В [5] предложен метод и осуществлен синтез последовательного корректирующего устройства ИСН понижающего типа с ШИМ (рис. 1), обеспечивающего близкие к минимально возможным амплитуду и длительность отклонения выходного напряжения ИСН в переходных режимах, вызванных коммутацией нагрузки. Метод синтеза разработан для случая малых отклонений длительности импульса управления
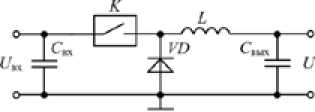
Рис. 1. Силовая цепь импульсного стабилизатора напряжения понижающего типа
A t и.у << T ,
где T – период преобразования.
Он заключается в приведении системы с широтно-импульсной модуляцией (ШИМ) к системе с амплитудно-импульсной модуляцией (АИМ), синтезе последовательного корректирующего устройства с использованием третьего полиномиального уравнения синтеза и обратного перехода от системы с АИМ к системе с ШИМ, учитывающего специфику, вносимую ШИМ. Такой подход позволяет достичь минимальной конечной длительности переходных процессов при наличии отклонения параметров корректирующего устройства и силовой цепи ИСН от номинальных.
Синтез осуществляется по регулируемым составляющим переменных состояния, под которыми понимают отклонения переменных состояния от их значений в стационарном режиме. Временные диаграммы, поясняющие процесс выделения регулируемых составляющих, приведены на рис. 2. Здесь I н, 1 С и I L - токи нагрузки, конденсатора и дросселя выходного фильтра ИСН, U C . р - регулируемая составляющая напряжения на емкости конденсатора выходного фильтра, U у – входной сигнал ШИМ, U ШИМ – опорный пилообразный сигнал широтно-импульсного модулятора, m = 1, 2, 3,... На временных диаграммах токов регулируемые и стационарные составляющие обозначены дополнительными индексами «р» и «ст».
Дискретная передаточная функция последовательного корректирующего устройства, синтезированная с использованием рассматриваемого метода, имеет вид
W к ( p ) = d + d (1 - e р ), (2)
где d = LC / T, L и C - индуктивность и емкость выходного фильтра ИСН.
В [5] предложен вариант реализации в ИСН понижающего типа с ШИМ корректирующего устройства (2), при котором используются только дискретные значения регулируемой составляющей напряжения на емкости конденсатора выходного фильтра ИСН. Согласно этому варианту реализации регулируемая составляющая входного сигнала широтно-импульсного модулятора имеет вид
U ур (mT ) = - -d — [2 Uc . p ( mT ) - UC p (( m - 1) T ) ] , U вх K м
где U вх - напряжение на входе ИСН, K м=А t иу/А U „ ( mT)=T / U m , U C . р( mT) - дискретные значения регулируемой составляющей напряжения на емкости конденсатора выходного фильтра, Um – амплитуда пилообразного напряжения ШИМ.
Здесь и далее с учетом выполнения условия (1) считается, что приращение длительности импульса управления Δ t и.у мало и управляемое переключение силового ключа ИСН происходит – 329 –
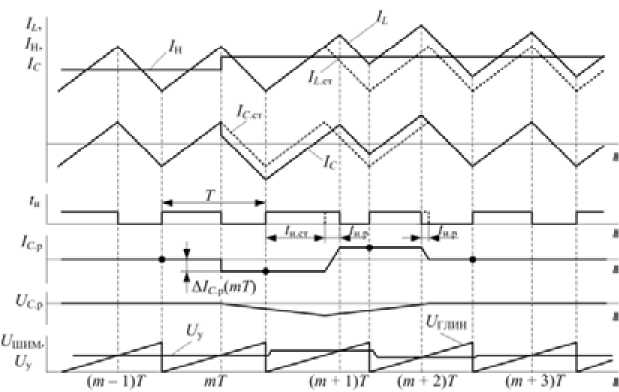
Рис. 2. Временные диаграммы, поясняющие процесс выделения регулируемых составляющих в моменты времени mT, а, следовательно, интервал времени между соседними управляемыми моментами переключения остается неизменным и равным периоду T. Текущие значения динамической составляющей входного сигнала широтно-импульсного модулятора определяются как
U уд ( mT ) = U уд ((m - 1) T ) + U ур ( mT ). (4)
Определить регулируемую составляющую напряжения Uc.р на емкости конденсатора выходного фильтра ИСН путем проведения вычислительных операций с дискретными или непрерывными значениями выходного напряжения U,ых стабилизатора не представляется возможным. Это объясняется тем, что схема замещения конденсатора выходного фильтра ИСН может быть представлена в виде последовательно включенных емкости Cф конденсатора и его внутреннего активного сопротивления RC. Поэтому в выходном напряжении ИСН - напряжении на конденсаторе выходного фильтра ИСН – кроме напряжения на емкости UC присутствует напряжение URC на внутреннем активном сопротивлении RC конденсатора. Поскольку внутреннее активное сопротивление RC конденсатора подвержено значительным изменениям под действием температурного и временного факторов, то и напряжение URC также будет изменяться, а, следовательно, определить напряжение UC на емкости конденсатора, например, путем вы-тт тт читания неопределенного напряжения URC из выходного напряжения Uвых не представляется возможным.
Вычислить приращение за период T регулируемой составляющей напряжения Шср на емкости конденсатора можно путем интегрирования на интервале времени, равном периоду Т, приращения регулируемой составляющей ΔIC.р тока конденсатора mT
A U с .р ( mT ) = ^ J a / c .p (( m - 1) T ) dt . (5)
( m - 1) T
Поскольку приращение регулируемой составляющей тока конденсатора на интервале между регулируемыми моментами времени mT переключения силового ключа ИСН остается – 330 – неизменной (рис. 2), то для его определения достаточно вычислить первую разность тока конденсатора
A IС р( mT ) = IСДmT ) - 1СДm - 1) T )
или
A I c , p ( mT ) = I c , p ( mT + т ) - 1c , (( m - 1) T + t ) , (6)
где τ < T – в общем случае произвольно выбранный фиксированный интервал времени.
Для того чтобы располагать временем для проведения вычислительных процедур, необходимых для определения входного сигнала широтно-импульсного модулятора к моменту времени mT , целесообразно τ выбирать так, чтобы моменты времени ( mT +τ) максимально удалить от моментов времени mT регулируемого переключения силового ключа ИСН. Для ИСН понижающего типа и при модуляции заднего фронта импульса моменты времени ( mT +τ) следует выбрать непосредственно после момента включения силового ключа ИСН. Поскольку, как правило, в ИСН понижающего типа статический коэффициент заполнения K з. ст > 0,25, то на процедуры выборки дискретных значений входных сигналов и проведение вычислений остается время, близкое к четверти периода преобразования. Использование выражения (6) позволяет определить А 1С р( mT ) в момент времени ( mT +т). Поскольку приращения регулируемой состав.
ляющей напряжения на интервале между регулируемыми моментами переключения силового ключа ИСН постоянны, то (5) можно записать в виде
Т
A U cp ( mT ) = - A I СД m - 1) T + t ). (7)
С
Определить дискретные значения регулируемой составляющей напряжения на емкости конденсатора выходного фильтра можно по выражению
U c p ( mT ) = U с .р (( m - 1) T ) + A Uc p ( mT ). (8)
Таким образом, замена процедуры интегрирования согласно (5) определением площади прямоугольника согласно (7) позволяет определить приращение регулируемой составляющей напряжения на емкости конденсатора AU C . р( mT) и саму регулируемую составляющую напряжения U c p( mT ) в окрестности момента времени ( m -1) T +т, т. е. раньше момента времени mT , в окрестности которого формируется регулируемый фронт импульса управления силовым ключом. Соответственно, и вычисление входного сигнала широтно-импульсного модулятора с использованием (3) и (4) также может быть произведено ранее момента времени mT в окрестности момента времени ( m –1) T +τ.
На рис. 3 приведена структурная схема устройства управления, реализующего дискретный закон (2) формирования входного сигнала ШИМ.
Устройства выборки и хранения (УВХ1–УВХ3) обеспечивают выборку входных сигналов в моменты времени ( mT +т) и хранение выбранных значений сигналов на последующих интервалах времени длительностью в период преобразования Т . Измеритель первой разности (ИПР) обеспечивает выполнение (6), вычислитель В1 производит вычисления согласно (7) и (8), а вычислители В2 и В3 – согласно (3) и (4) соответственно.
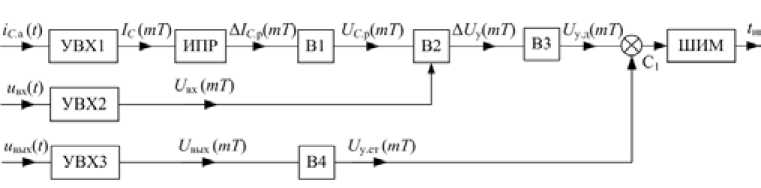
Рис. 3. Структурная схема, поясняющая процесс формирования сигнала ШИМ
Для обеспечения астатизма выходного напряжения ИСН используется способ, аналогичный применяемому в ИСН с вариантом реализации закона управления по мгновенным значениям координат состояния, согласно которому входной сигнала U у ШИМ формируется как сумма динамического сигналом управления U „ и сигнала U у. ст, задающего статический уровень выходного напряжения. Сигнал U уст вычисляется как интеграл сигнала рассогласования по напряжению, взятый с некоторым коэффициентом K р, причем величина этого коэффициента выбирается достаточно малой, чтобы на интервале переходного процесса приращения сигнал U у.ст был много меньше приращения динамического сигнала управления U у.д. Это исключает влияние сигнала U у . ст на динамические характеристики ИСН. В рассматриваемом ИСН с дискретным способом формирования входного сигнала модулятора сигнал U уст вычисляется посредством вычислителя В4 согласно выражению
m иуст = K р £s( kT), (9)
к = 1
где е( kT) = U вых( mT ) - U 0 - дискретные значения сигнала рассогласования по напряжению, U 0 -задающее напряжение.
Результаты исследований
Для проверки работоспособности рассмотренного алгоритма обработки дискретных значений информационных сигналов и формирования импульсного сигнала управления силовым ключом СМ использован макет силового модуля, управление силовым ключом в котором обеспечивается микроконтроллерной техникой. Оцифровывание входных сигналов производится внешним аналого-цифровым преобразователем (АЦП) MAX130B, вычислительные процедуры - микроконтроллером ATMEGA128A1. Силовая цепь макета СМ имеет следующие параметры: индуктивность дросселя L= 110–180 мкГн и зависит от силы протекающего тока, емкость конденсатора выходного фильтра C = 1000 мкФ, период преобразования Т = 25 мкс, входное напряжение U , х = 25-80 В и выходное напряжение U , ых = 15 В.
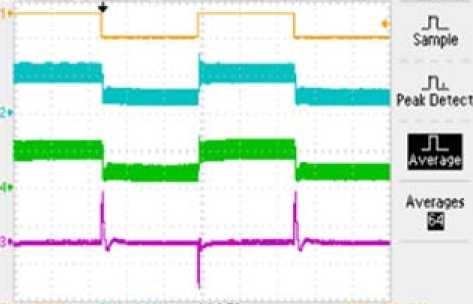
На временных диаграммах рис. 4-6 приведены осциллограммы процессов в СМ понижающего типа с микроконтроллерным управлением. На этих диаграммах луч 1 является сигналом управления ключом, коммутирующим нагрузку. При этом ступенчатое приращение тока нагрузки составляет 1,2 А. Луч 2 – сигнал с выхода датчика тока дросселя СМ в масштабе 2 А/ деление. Луч 3 отображает переменную составляющую напряжения на выходе СМ. В макете используется аналоговый способ выделения сигнала рассогласования выходного напряжения – 332 –
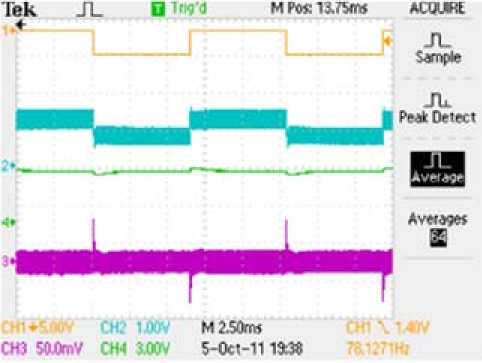
Рис. 4. Осциллограммы процессов в макете силового модуля понижающего типа
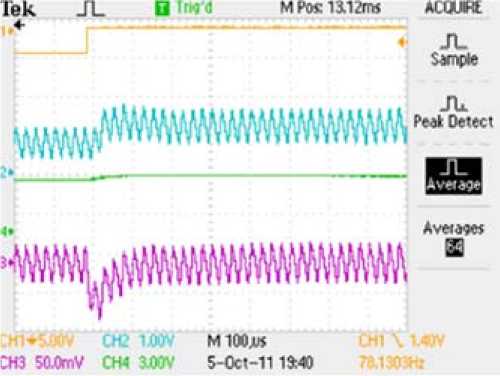
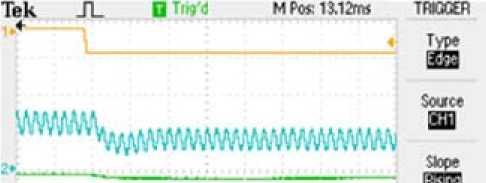
Рис. 5. Осциллограммы процессов в макете силового модуля понижающего типа при подключении нагрузки и его интегрирования. Для этого применяется источник опорного напряжения и интегратор на операционном усилителе. При этом вычислитель В4 (см. рис. 2) упраздняется, а на вход АЦП поступает интеграл сигнала рассогласования выходного напряжения. Этот сигнал отображается лучом 4 осциллографа. Входное напряжение СМ составляет 50 В. На рис. 5, 6 более детально показаны временные интервалы в окрестности моментов коммутации тока нагрузки.
Рассмотренный вариант реализации (2) с применением дискретных значений регулируемой составляющей выходного напряжения может быть использован и для управления СМ, входящими в состав многомодульного ИСН. Устройство управления СМ, входящим в состав многомодульного ИСН, помимо задач по обеспечению требуемого качества выходного напряжения в динамических и статических режимов работы должно решать и задачу по распределению тока нагрузки между отдельными модулями, входящими в состав ИСН. Как правило, – 333 –
-
4. мобе
’•VW'^^WWfWWi "
Cowing
М100дх
CHJ soomv СЖ 100V 5-Осы 11441
Рис. 6. Осциллограммы процессов в макете силового модуля понижающего типа при отключении нагрузки разработчики стремятся обеспечить равномерное распределение тока нагрузки между СМ, что позволяет выровнять тепловыделение в модулях. Для равномерного распределения тока нагрузки между СМ при аналоговой реализации УУ часто используют контур отрицательной обратной связи (ОС) по току дросселя. Применение этого контура формирует наклонную внешнюю характеристику модуля, что способствует выравниванию выходных токов СМ.
Астатизм выходного напряжения многомодульного ИСН обеспечивается за счет контура ОС, интегрирующего сигнал рассогласования по напряжению. Применение в УУ контура отрицательной ОС по току дросселя может негативно отразиться на динамических характеристиках СМ и многомодульного ИСН в целом, так как отрицательная ОС по току дросселя препятствует изменению тока дросселя, необходимому для компенсации приращения тока нагрузки. Поэтому сигнал ОС по току дросселя подвергается частотной коррекции апериодическим звеном с постоянной времени, превышающей длительность переходного процесса при стабилизации выходного напряжения.
Применение подобного подхода при дискретной обработке информационных сигналов возможно за счет введения контура ОС по току. Структурная схема, поясняющая процесс формирования сигнала ШИМ при наличии контура ОС по току дросселя, приведена на рис. 7. Необходимая частотная коррекция сигнала ОС по току дросселя может осуществляться как внешней RC -цепью до поступления сигала на УВХ4, так и программными средствами с помощью вычислителя В5 (рис. 7).
Исследование процессов в макете СМ, устройство управления которого дополнено контуром ОС по току дросселя, не выявило существенного изменения динамических и статических характеристик. На рис. 8 даны осциллограммы процессов в СМ понижающего типа с контуром ОС по току дросселя, полученные для режима работы, идентичного режиму, в котором получены осциллограммы, приведенные на рис. 4–6. Основное отличие осциллограмм, приведенных на рис. 4–6 и рис. 8, состоит в том, что сигнал на выходе интегратора сигнала рассогласования (второй снизу) при отсутствии контура ОС по току дросселя отклоняется незначительно, в то
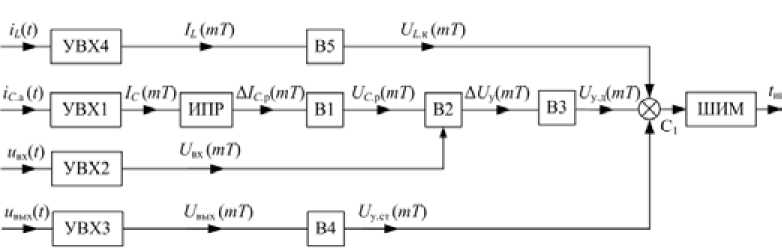
Рис. 7. Структурная схема, поясняющая процесс формирования сигнала ШИМ при наличии обратной связи по току дросселя
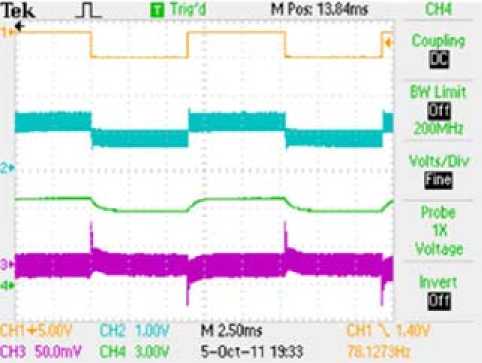
Рис. 8. Осциллограммы процессов в силовом модуле понижающего типа с контуром обратной связи по току дросселя время как при наличии контура ОС по току дросселя происходят существенные изменения величины сигнала на выходе интегратора. Это объясняется тем, что изменение сигнала на выходе интегратора сигнала рассогласования компенсирует приращения сигнала контура ОС по току дросселя, что позволяет обеспечить астатизм выходного напряжения силового модуля.
Функциональная схема ИСН, образованного двумя параллельно включенными силовыми модулями, изображена на рис. 9. Кроме силовых модулей СМ1 и СМ2 в состав ИСН входит общесистемный блок (ОСБ), который содержит задающий генератор (ЗГ) и интегратор сигнала рассогласования (И), который выполняет операцию интегрирования сигнала рассогласования
S(t)=U вых(<)—Uоп, где Uоп – опорное (эталонное) напряжение.
В качестве датчика тока конденсатора (ДТК) использован трансформатор тока. Датчик тока дросселя (ДТД) выполнен в виде двух трансформаторов тока, работающих в однотактном режиме. Первичная обмотка первого трансформатора включена последовательно с силовым – 335 –
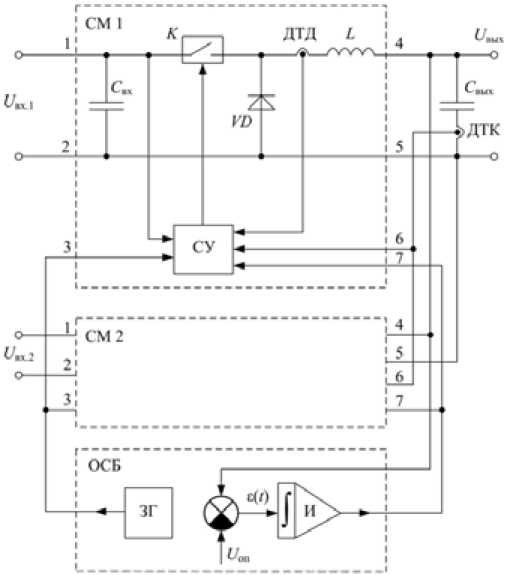
Рис. 9. Функциональная схема двухмодульного ИСН понижающего типа ключом K, вторичная – с диодом VD. Вторичные обмотки через выпрямляющие диоды подключены параллельно и нагружены на резистор, на котором формируется выходной сигнал датчика.
Применение внешнего ЗГ позволяет организовать работу силовых модулей на одной частоте, а временной сдвиг процессов для создания многофазного режима работы обеспечивается временными задержками, реализуемыми микроконтроллерами, входящими в схемы управления (СУ) силовых модулей. Применение в ИСН общего интегратора сигнала рассогласования является обязательным условием параллельной работы, поскольку применение таких интеграторов в каждом силовом модуле приведет к интегрированию различных по величине сигналов рассогласования по напряжению, достижению предельных значений интегралов сигналов рассогласования в большинстве СМ и прекращению их работы в режиме стабилизации выходного напряжения. Кроме того, использование интегратора сигнала рассогласования, выполненного на аналоговых элементах, позволяет повысить надежность многомодульного ИСН при резервировании интегратора сигнала рассогласования.
В таком ИСН схема вычислительного процесса в каждом силовом модуле соответствует приведенной на рис. 7.
На временных диаграммах рис. 10, 11 изображены осциллограммы процессов в ИСН понижающего типа с микроконтроллерным управлением при входных напряжениях силовых модулей 50 В. На этих диаграммах луч 1 отображает сигнал управления ключом, коммутирующим нагрузку. Ступенчатое приращение тока нагрузки составляет 3 А. Лучи 2 и 4 отображают – 336 –
Тек JL Bing'd МРокБМкгс ACQURE
MZSJmt CH3 100mV CH4 1 ,W 5-0ct-111636
Рис. 10. Осциллограммы процессов в силовых модулях ИСН понижающего типа при коммутации нагрузки
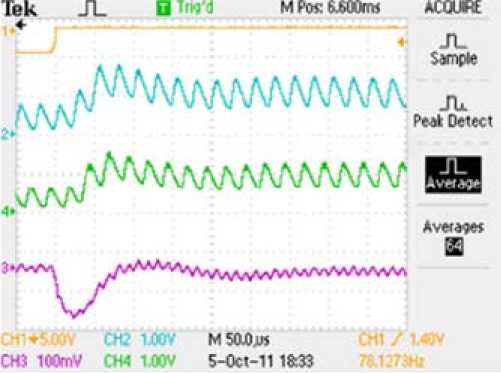
Рис. 11. Осциллограммы процессов в силовых модулях ИСН понижающего типа при подключении нагрузки сигналы с выхода датчиков тока дросселей первого и второго силовых модулей ИСН (масштаб сигналов составляет 2 А/дел). Луч 3 отображает переменную составляющую напряжения на выходе ИСН. Длительность переходного процесса стабилизации выходного напряжения в этом случае также остается близкой к минимально возможной.
Действие ОС по току дросселя СМ, обеспечивающее выравнивание токов параллельно включенных модулей, наглядно демонстрируется в режимах работы СМ при различном уровне входных напряжений у каждого из модулей. На рис. 12 изображены осциллограммы в силовых модулях ИСН понижающего типа при уровне входного напряжения СМ1 – 40 В, а у СМ2 – 60 В. Остальные параметры проведения исследования соответствуют параметрам, при которых получены осциллограммы, приведенные на рис. 9. Из сравнения осциллограмм рис. 10–12 следу- – 337 –
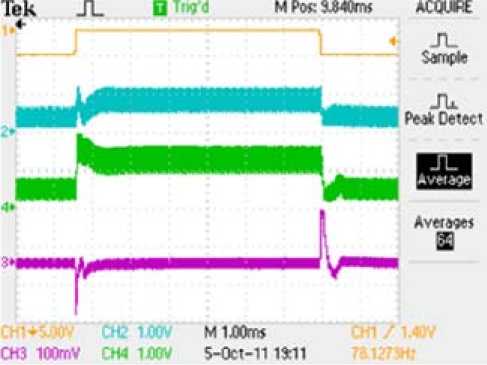
Рис. 12. Осциллограммы процессов в силовых модулях ИСН понижающего типа при различном уровне входных напряжений ет, что изменение уровней входного напряжения СМ не привело к существенному изменению динамических и статических характеристик ИСН на основе двух СМ в части стабилизации выходного напряжения. При различном уровне входных напряжений (рис. 12) произошло изменение уровня пульсации токов дросселей СМ и характера переходного процесса изменения токов дросселей, что объясняется различной величиной входных напряжений. После окончания переходного процесса наблюдается выравнивание токов дросселей СМ.
Выводы
Исследование процессов в макете ИСН, состоящем из одного или двух силовых модулей, показали работоспособность ИСН с предложенным устройством управления силовыми модулями. При этом в ИСН обеспечивается астатизм выходного напряжения и длительность переходных процессов в 2–3 периода преобразования при ступенчатом изменении тока нагрузки и малом отклонении длительности импульса управления. При значительной величине коммутируемой составляющей тока нагрузки, приводящей к существенному приращению длительности импульса управления, происходит увеличение длительности переходного процесса до 3–5 периодов преобразования, однако сохраняется конечный характер переходного процесса, что объясняется применением для синтеза закона управления третьего полиномиального уравнения и адекватным переходом от системы с АИМ к системе с ШИМ.
Необходимость однократного в течение периода Т проведения процедуры оцифровывания и простых вычислительных операций освобождает существенный временной интервал в работе цифрового вычислительного устройства, который может быть использован для решения сервисных, контрольных и вспомогательных задач управления ИСН.
Задача по распределению тока нагрузки ИСН между силовыми модулями решается за счет введения в каждом СМ дополнительного контура управления по току дросселя. Частотная коррекция сигнала, пропорционального току дросселя, посредством апериодического звена, постоянная времени которого превышает длительность переходных процессов в ИСН, позволяет – 338 – исключить влияние контура управления по току дросселя на динамические характеристики ИСН.
