Быстродействующий импульсный стабилизатор напряжения повышенной надежности с интегратором в цепи обратной связи

Автор: Капулин Д.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 (20), 2008 года.
Бесплатный доступ
Рассмотрена pauoma импульсных стабилизаторов напряэюения пониэюающего и повышающего типов с интегратором сигнала рассогласования в цепи обратной связи по напряэюению. Проведены исследования по опре-делению диапазона изменения интеграла сигнала рассогласования в зависимости от различных параметров силовых цепей, схем управления стабилизаторами.
Короткий адрес: https://sciup.org/148175708
IDR: 148175708 | УДК: 621.314
High reliable high-speed voltage impulse stabilizer with integrator in reverse tie circuit
The function of voltage impulse stabilizer decrease and increase types with reverse tie circuit integrator is considered. The researches for definition of interval for non-adjustment integral signal in dependence of various parameters power and control circuits are conducted.
Текст научной статьи Быстродействующий импульсный стабилизатор напряжения повышенной надежности с интегратором в цепи обратной связи
Uвых. (t) = Kр Je(t)dt + Uвых. (0), где K^ - коэффициент передачи интеграла сигнала рассогласования е(t) = ивых исн(t) - U0, ивых исн(t) - выходное напряжение ИСН; U0 - опорный сигнал; ивых и(0) - начальное значение выходного сигнала интегратора.
В то же время, контур обратной связи по интегралу сигнала рассогласования, обеспечивающий астатизм ИСН, может ухудшить его динамические характеристики, в частности, при подключении мощных потребителей энергии к ИСН. Сохранение малой длительности переходных процессов для режимов «малых» отклонений можно обеспечить путем ограничения коэффициента усиления сигнала рассогласования. В случае коммутации значительной нагрузки, малую длительность переходных процессов можно обеспечить прерыванием процесса интегрирования сигнала рассогласования по напряжению [1].
В случае, если предъявляются повышенные требования к качеству выходного напряжения и в динамических режимах работы, то в ИСН используют специальные законы управления, например, оптимальный по быстродействию закон управления ИСН [2]. Структурная схема устройства управления стабилизаторами напряжения, реализующего этот закон, приведена на рис. 1. Устройство управления на рис. 1 представлено в виде двух контуров управления, отвечающих за динамические характеристики ИСН. Коэффициенты Kr KU, Ксв, К0 аналитически оп ределены в [2]. Сигналы с контуров управления подаются на входы сумматора С1.
Для выполнения комплекса требований в части обеспечения астатизма выходного напряжения на третий вход сумматора С1 подается сигнал с дополнительного контура обратной связи, содержащего интегратор сигнала рассогласования. Коэффициент Кр интегратора аналитически определен в [2].
В [2] для сохранение предельного быстродействия ИСН в режимах работы при «малых» возмущающих воздействиях предложено ограничивать величину постоянной интегрирования К ^ , а для обеспечения малой длительности переходных процессов в режимах работы, приводящих к прерыванию ШИМ, предложено прерывать процесс интегрирования с помощью блока прерывания интегрирования (БПИ) при выходе входного сигнала модулятора иу из зоны ШИМ.
Рис. 1. Структурная схема устройства управления
Постановка задачи. Диапазон возможного изменения интеграла сигнала рассогласования в БПИ задается «верхней» (иверх) и «нижней» (иниж) границами, показанными на рис. 2.
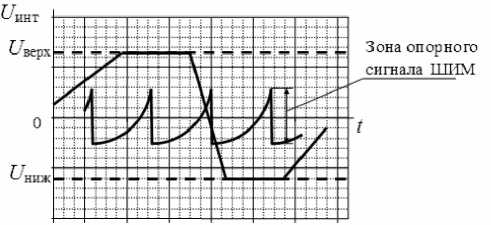
Рис. 2. Ограничение диапазона изменения интеграла сигнала рассогласования
Длительность и амплитуда отклонения выходного напряжения в переходных режимах при коммутации значительной нагрузки зависят от мощности нагрузки, входного напряжения, параметров силовой цепи и устройства управления, а также принятых «верхнего» и «нижнего» уровней ограничения диапазона изменения интеграла сигнала рассогласования. В связи с этим, предметом исследований является установление зависимости «верхнего» и «нижнего» уровней ограничения, позволяющей минимизировать амплитуду отклонения выходного напряжения и длительность переходного процесса при изменениях мощности нагрузки, входного напряжения и параметров силовой цепи.
Метод решения. Для проведения исследований в пакете проектирования OrCAD были разработаны имитационные модели ИСН понижающего (ИСН ПН) и повышающего (ИСН ПВ) типов с оптимальным по быстродействию управлением. Были проведены исследования электромагнитных процессов в ИСН. Выборочно временные диаграммы, полученные в результате исследований, приведены на рис. 3,4. Принятые на временных диаграммах обозначения: I - ток нагрузки, IL - ток дросселя силовой цепи, U - выходное напряжение ИСН, U - сигнал интегратора сигнала рассогласования, Uниж - «нижний» уровень ограничения, иверх - «верхний» уровень ограничения.
Исследования по выбору уровней ограничения диапазона изменения интеграла сигнала рассогласования целесообразно проводить при значениях входного напряжения, близких к значению выходного напряжения. При этом скорости нарастания (для ИСН ПН) и спада (для ИСН ПВ) токов дросселя минимальны, время переходного процесса увеличивается, а на выходе ИСН возникает характерное перерегулирование, которое может быть снижено посредством задания уровней ограничения интегрирования (рис. 3,4). В случае большой разницы напряжений на входе и выходе скорости изменения токов дросселя высокие, «затягивания» переходного процесса нет, перерегулирование сигнала выходного напряжения отсутствует, сигнал на выходе интегратора изменяется плавно, и ограничивать его не имеет смысла. Исходя из этого, исследования проводились для ИСН ПН при низком значении входного напряжения U = 105 В для случая нарастания тока нагрузки, а для ИСН ПВ - при высоком значении входного напряжения, близком к максимально возможному рабочему напряжению, U = 95 В для случая спада тока нагрузки.
Исследования работы стабилизатора проводились при различных емкостях конденсатора выходного фильтра С, индуктивностях дросселя силовой цепи L и частотах преобразования/ Из анализа диаграмм хорошо видно различие переходных процессов при наличии и отсутствии ограничения интегрирования. При срабатывании уровня ограничения длительность переходного процесса снижается, уменьшается перерегулирование (рис. 3,4).
Полученные результаты проведенных исследований, позволяют судить о том, что уровни ограничения диапазона интегрирования слабо зависят от емкости конденсатора выходного фильтра при наличии мощного конденсатора. Однако при увеличении частоты преобразования наблюдается усиление зависимости уровней ограничения интегрирования от емкости конденсатора. Стоит отметить, что при значительном снижении емкости конденсатора выходного фильтра становится очень трудно обеспечить устойчивость ИСН при увеличении диапазона интегрирования.
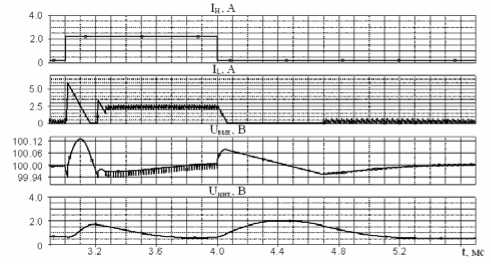
Рис. 3. Временные диаграммы работы ИСН ПВ при параметрах: Uвх = 95 В; U^ = -1; U х = 2; L = 150 мкГн;
С = 1 000мкФ;/= 60 кГц
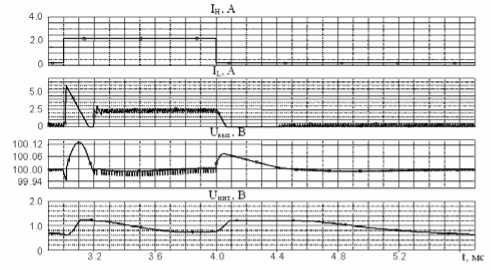
Рис. 4. Временные диаграммы работы ИСН ПВ при параметрах: Uвх = 95 В; Ц^ = -1; Uве х = 1,2; L = 150 мкГн; С = 1 000 мкФ;/= 60 кГц
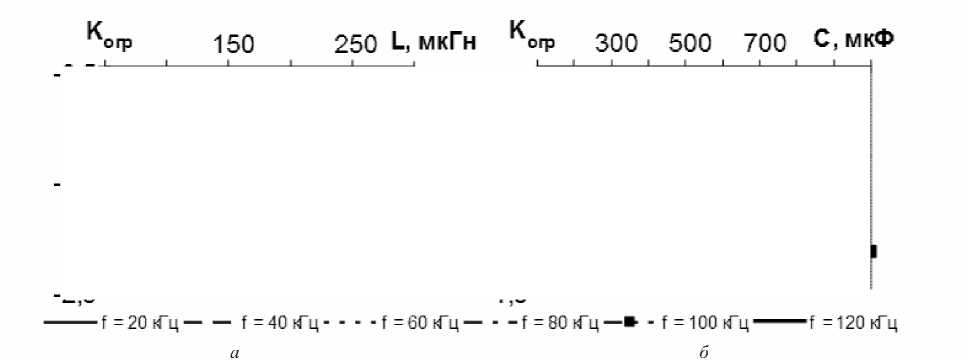
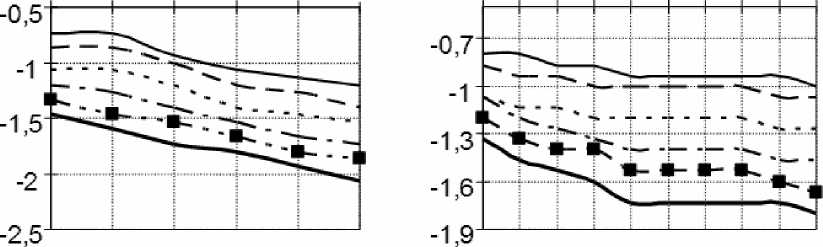
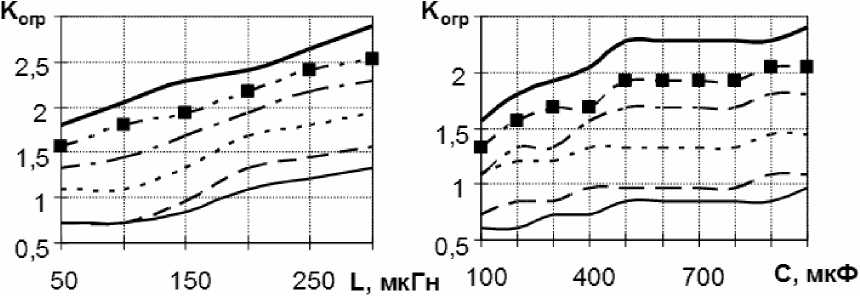
Результаты исследований по установлению зависимостей уровня ограничения диапазона возможного изменения интеграла сигнала рассогласования от величины емкости С конденсатора выходного фильтра, индуктивности L дросселя силовой цепи и частоты преобразования/ приведены графически на рис. 5. Значение смещения границ диапазона изменения интеграла сигнала рассогласования определяется по формуле Ког = Кз [Uниж/Uл(Т)] -для ИСН ПН; К = (1 -K^U^U/T)] для ИсНПВ, где U (Т) - амплитудное значение пилообразного сигнала ШИМ; Кз - статический коэффициент заполнения.
Таким образом, приведенные на рис. 5 зависимости позволяют определять границы возможного изменения интеграла сигнала рассогласования, при которых обеспечивается наименьшее отклонение выходного напряжения. При этом перерегулирование снижается до 70 %, а длительность переходного процесса на 10...50 % относительно результатов, полученных при использовании ИСН без прерывания интегрирования.
Использование полученных зависимостей смещения границ диапазона изменения интеграла сигнала рассогласования при управлении ИСН позволит снизить перерегулирование, сократить длительность переходных процессов, избежать возникновения автоколебательных режимов работы ИСН при коммутации значительной на- грузки или нагрузки, носящей импульсный характер. Одновременно с этим повышается надежность системы электропитания и увеличивается срок службы спутника свя- малого времени регулирования при значительных возмущающих воздействиях. При этом динамические характеристики ИСН остаются высокими, близкими к предель- зи в целом.
Совместно с оптимальным по быстродействию законом управления, обеспечивающим близкую к минимальной длительность переходных процессов, применение полученных зависимостей позволяет также достигать ным, при одновременно низком значении выходного импеданса СЭП, что обеспечивается применением закона управления [1].
Применять результаты полученных исследований целесообразно с использованием средств цифровой обра-
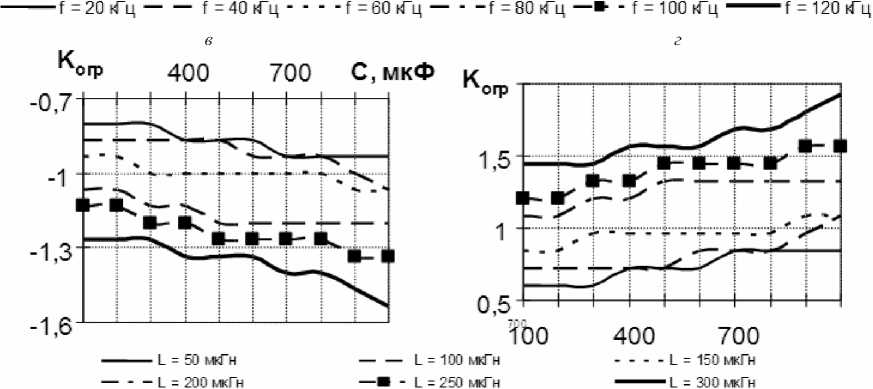
д
е
Рис. 5. Зависимости коэффициента ограничения от индуктивности дросселя, емкости выходного фильтра, частоты преобразования ИСН: а - зависимость коэффициента ограничения от индуктивности дросселя для ИСН ПН; б - зависимость коэффициента ограничения от емкости выходного фильтра для ИСН ПН; в - зависимость коэффициента ограничения от индуктивности дросселя для ИСН ПВ; г - зависимость коэффициента ограничения от емкости выходного фильтра для ИСН ПВ; д - зависимость коэффициента ограничения от емкости выходного фильтра для ИСН ПН при вариации индуктивности дросселя; е - зависимость коэффициента ограничения от емкости выходного фильтра для ИСН ПВ при вариации индуктивности дросселя
ботки сигналов, так как реализация значительно усложненного закона управления ИСН на аналоговых элементах станет затруднительной как в проектировании, так и в производстве. Структурные схемы выпускаемых промышленностью специализированных интегральных схем существенно отличаются от структуры устройства управления, реализующего оптимальный по быстродействию закон управления. Аппаратная реализация закона управления на подобных микросхемах вызовет применение большого количества внешних элементов, что повлечет за собой усложнение и снижение надежности устройства управления. Поэтому переход на микроэлектронную базу, к цифровой обработке сигналов является не обходимостью, что также повысит надежность СЭП и улучшит ее эксплуатационные характеристики.
