Быстрый алгоритм определения ординат импульсной переходной функции при возбуждении динамического объекта тест-сигналом на основе двоичной м последовательности

Автор: Яковлев Вадим Фридрихович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Физика и электроника
Статья в выпуске: 4-1 т.14, 2012 года.
Бесплатный доступ
Рассмотрен алгоритм вычисления ординат импульсной переходной функции линейного динамического объекта при его возбуждении тест-сигналом на основе двоичной М"последовательности с помощью быстрого преобразования Уолша"Адамара.
Импульсная переходная функция, тест-сигнал, двоичная м-последовательность, быстрое преобразование уолша
Короткий адрес: https://sciup.org/148201148
IDR: 148201148 | УДК: 681.51.015
Fast algorithm for computing the impulse response of a linear dynamic object using binary m sequence as input
The paper considers algorithm of computing the impulse response of a linear dynamic object using binary M"sequence as input via fast Walsh"Hadamard transform.
Текст научной статьи Быстрый алгоритм определения ординат импульсной переходной функции при возбуждении динамического объекта тест-сигналом на основе двоичной м последовательности
Для идентификации линейных динамических объектов используются их различные модели, в том числе и импульсная переходная функция (ИПФ). В этом случае объект может быть описан следующим уравнением:
N - 1
-
У [ i ] - h 0 +A t • Z h [ j ] • x [ i - j ] . (1)
j = o
Здесь y[i] - реакция объекта, Д t - шаг дискретизации, x[i] – входной тест-сигнал, h[j] – ординаты импульсной переходной функции, h0 – реакция объекта на постоянный рабочий сигнал, N – время памяти объекта [1].
На практике для независимой оценки ординат ИПФ при идентификации применяют ортогональные к сдвигу кусочно-постоянные тест-сигналы небольшой амплитуды, не нарушающие нормальное функционирование объекта, тогда при измерении реакции объекта один раз на такте тест-сигнала:
p
Z У [ i ] • x [ i - j ]
h[ j ] - ~p----------. (2)
Z x 2[ i - j ]
i = 0
В качестве тест-сигнала удобно использовать легко реализуемые псевдослучайные двоичные М-последовательности [1, 2]. Определение вза-имокорреляционной функции для различных j по (2) требует большого объема вычислений.
Известен алгоритм, уменьшающий объем вычислений для определения ординат ИПФ при возбуждении динамического объекта тест-сигна-лом в виде двоичной М-последовательности, на
основе быстрого преобразования Адамара [3, 4, 5]. Целью этой работы является модернизация быстрого алгоритма для вычисления ординат ИПФ.
Двоичная М-последовательность является упорядоченным с помощью сопровождающей матрицы (характеристического полинома F(x)), множеством компонент Si вектора координат элементов поля Галуа GF(2n) в степенном базисе [6]. М-последовательность, генерируемая с помощью характеристического полинома степени n, имеет период Р = (2n – 1) тактов.
При генерации тест-сигналов эти компоненты заменяются реальными сигналами с нормированными значениями:
х(0) = +1; х(1) = -1. (3)
Умножение для реальных сигналов оказывается эквивалентным сложению по модулю 2 для компонент S:
i
1 ф o - 1 ^ ( - 1) • ( + 1) = - 1
-
1 ф 1 - o о ( - 1) • ( - 1) -+ 1
0 ф 0 - 0 > ( + 1) • ( + 1) -+ 1 (4) 0 ф 1 - 1 > ( + 1) • ( - 1) -- 1
В тест-сигнал на основе двоичной М-после-довательности вводятся дополнительные такты для получения несмещенной оценки h[j] (“нулевая строка”), а также для устранения погрешности от неверного задания исходного состояния объекта перед началом тестирования [1, 2].
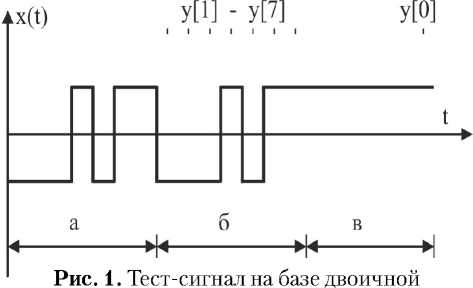
Для упрощения изложения алгоритм вычисления ординат ИПФ далее рассматривается для небольшого количества h[j]. На рис. 1 приведен тест-сигнал на основе двоичной М-последова-тельности с характеристическим полиномом F(x) = х3+х+1 и периодом 7 тактов, точками указаны моменты измерения реакции объекта.
На практике используются М-последова-тельности с характеристическими полиномами степенью не менее 8.
М-последовательности.
а – формирование начальных условий, б – период М-последовательности, формирование “нулевой строки”.
линейных динамических объектов. Например, в пятой строке матрицы Х приведен тест-сигнал с запаздыванием на 4 такта по отношению к входному сигналу генератора М-последовательности. Вычислим коэффициенты полинома-остатка по (9) для этого случая:
R 4 - x 4 mod( x 3 + x + 1) - ( x 2 + x ) , т.к.
x x + x
—3-------- x +—з-------.
x + x +1 x + x + 1
Из (10) следует, что a1 = 1, a2 = 1, a3 = 0 и x [ i - 3] - x [ i ] • x [ i - 1] .
Двоичная запись матрицы Х2 имеет вид:
В соответствии с (2):
|
0 |
4 + + + + + + + +^ |
4 У [0] ) |
|||
|
40] |
+---+-++ |
y [1] |
|||
|
41] |
1 - — • |
++---+-+ |
y [2] |
||
|
h[2] |
+++---+- |
• |
y [3] |
||
|
h [3] |
8 |
+-++---+ |
y [4] |
(5) |
|
|
h [4] |
++-++--- |
y [5] |
|||
|
h [5] |
+-+-++-- |
y [6] |
|||
|
( h [6] j |
v +-- + - + + - j |
l У [7] J |
|||
X 2 -
4 00000000 ) 01110100 00111010 00011101 01001110 00100111 01010011
( 01101001 J
.
В (12) представлены матрица Уолша-Адама ра [7] W и ее двоичный аналог W2 размернос тью 8 • 8 .
-
H - —— X • Y
P + 1 .
Здесь H и Y – векторы-столбцы оценок ординат ИПФ и реакции объекта, X - задержанные реплики входного сигнала, матрица плана эксперимента. С целью упрощения записи в матрице Х приведены только знаки нормированных значений тест-сигнала, дополнительная “нулевая строка” размещена в левом столбце Х.
В аппаратном или программном генераторе непосредственно доступны М-последователь-ность и ее реплики с запаздыванием от 1 до (n-1) такта. М-последовательности с запаздыванием j > n являются линейными комбинациями последовательностей с запаздываниями меньше n того же характеристического полинома:
S. _ j = ax • S ® a 2 • S , . , ©•......® a n • S - n + 1 . (7)
Для тест-сигналов выражение (7) записывается так:
x [ i - j ] - ( x [ i ]) a 1 • ( x [ i - 1]) a 2 • • ( x [ i - n + 1]) a n (8)
Коэффициенты ai в (7, 8) совпадают с коэффициентами полинома-остатка Rj(x) в GF(2n) [6]:
R j ( x ) - xJ mod F ( x ) . (9)
Выражение (9) иногда называют алгоритмом Дэвиса, его применяют для генерации задержанных М-последовательностей при идентификации
|
4 ++++++++) |
4 00000000 ) |
|||
|
+-+-+-+- |
01010101 |
|||
|
++--++-- |
00110011 |
|||
|
W - |
+-+--+-+ ++++---- |
, W - |
01011010 00001111 |
. (12) |
|
+--+-++- |
01101001 |
|||
|
+--++--+ |
01100110 |
|||
|
v ++----++ j |
l 00111100 ; |
При умножении вектора-столбца на матрицу Уолша-Адамара используют эффективное быстрое преобразование Уолша-Адамара (БПУ), значительно уменьшающее объем вычислений [7].
Согласно (7) любая строка матрицы Х2 является линейной комбинацией по модулю 2 n строк, соответствующих последовательной смене n-разрядных двоичных чисел в генераторе М-последовательности. В Х2 это вторая, третья и четвертая строки. Для тест-сигналов в Х этот алгоритм трансформируется в (8).
В матрице Уолша-Адамара размерностью 2 n • 2 n строки также определяются линейной комбинацией по модулю 2 n строк, соответствующих последовательному возрастанию двоичных n-разрядных чисел, образованными пересечением столбца и этими строками. Верхний (второй) элемент столбца соответствует младшему разряду.
В [3, 4] предложена методика применения БПУ для вычисления оценок ординат ИПФ при возбуждении динамического объекта тест-сигна-лом на основе М-последовательности.
В матрице Х2 столбцы упорядочены в порядке появления двоичных n-разрядных чисел в генераторе М-последовательности. После перестановки столбцов в порядке возрастания двоичных n-разрядных чисел матрица Х2совпадет с W2 (соответственно Х с W). Чтобы результат умножения матрицы на вектор-столбец не изменился, следует переставлять и компоненты y[i] вектора Y и спектральные коэффициенты Уолша, порядок следования которых отличается от расположения элементов h[j] в векторе H. Таким образом:
H - A 2 • W • A 1 • Y . (13)
Здесь А1 и А2 – матрицы перестановок, определяемые характеристическим полиномом М-последовательности.
Для перестановки элементов в векторе Y достаточно записывать замеры реакции объекта y[i] в массив не в естественном порядке, а по адресам, задаваемым двоичными числами в генераторе М-последовательности. Например, из (5) и (11) следует, что в векторе Y элементы должны быть переписаны в следующем порядке: y[0], y[1], y[6], y[2], y[7], y[5], y[4], y[3], матрица А1 тогда имеет вид:
|
< 10000000 ^ |
||
|
01000000 |
||
|
00000010 |
||
|
00100000 |
||
|
A - |
00000001 |
. (14) |
|
00000100 |
||
|
00001000 |
||
|
( 00010000 ; |
Разумно применить алгоритм БПУ на осно- ве факторизации матрицы преобразования Уол-ша-Адамара на произведение n одинаковых матриц. В отличие от алгоритма типа “бабочка” [7] в этом случае в каждом из n этапов БПУ выполняется одна и та же процедура, что упрощает программную реализацию алгоритма.
На рис. 2 алгоритм БПУ изображен в виде графа для рассматриваемого примера. Спектральные коэффициенты, вычисленные с помощью БПУ упорядочены по возрастанию номеров функций Уолша.
В [3, 4] показано, что адреса в двоичном формате, по которым расположены оценки ординат ИПФ h[j] в векторе спектральных коэффициентов Уолша, могут быть определены из матрицы К размерностью n • 2 ” . В матрицу К отбираются n столбцов из Х2, так чтобы верхние строки матрицы К, начиная со второй, образовали единичную матрицу размерностью n • n . Младший бит адреса располагается в левом столбце.
Для случая F(x) = х3+х+1 матрица К и матрица перестановок А2 на ее основе имеют вид:
|
K - |
< 000 ^ 100 010 001 110 |
, A 2 - |
< 10000000 ^ 01000000 00100000 00001000 00010000 |
. (15) |
|
011 |
00000010 |
|||
|
111 |
00000001 |
|||
|
L 101 > |
( 00000100 2 |
Соответствие спектральных коэффициентов Уолша и ординат ИПФ указано и на рис. 2.
Недостатком рассмотренного быстрого алгоритма является необходимость генерации в процессе вычислений всей матрицы Х2 размерностью 2 ” • 2 ” , например, при n = 8 это уже 65536 элементов.
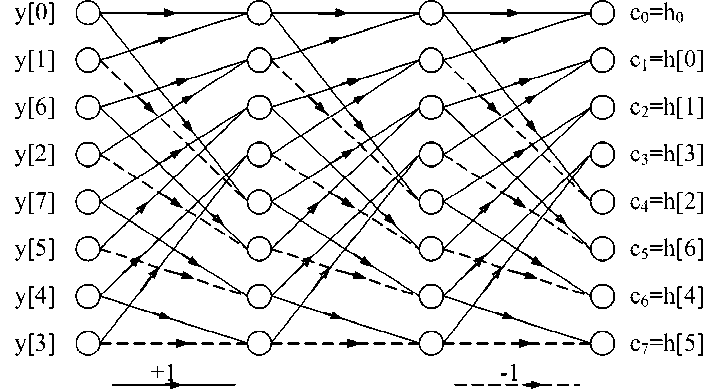
Рис. 2. Алгоритм БПУ
В этой статье предлагается другой способ сопоставления ординат ИПФ h[j] со спектральными коэффициентами Уолша в БПУ.
Спектральные коэффициенты, полученные в результате применения БПУ (Рис 2), расположены по возрастанию номеров функций Уолша при их естественном упорядочивании (по Адамару) [7].
Полная ортонормированная система 2n функций Уолша (Рис.3) определяется на основе n функций Радамахера Ri(t) [7]. Функции Уолша определяются через произведение функций Ра-дамахера. Наличие или отсутствие j-й функции Радамахера при получении i-й функции Уолша определяется j-м разрядом двоичного представления числа i. Например, w1(t) = w001(t) = R1(t), w 5 (t) = w 101 (t) = R 1 ( t ) ' R 3 ( t ) и т.Д.
Матрицы Х (5) и W (12) отличаются только перестановкой столбцов, следовательно строка x[i] в (5) соответствует R1(t) в (12), строка x [ i ] • x [ i - 1] в (5) соответствует R 1 ( t ) • R 2( t ) = w011(t) = w3(t) в (12) и т.д.
Таким образом, двоичная запись номера спектрального коэффициента Уолша сi указывает сигналы с каких разрядов генератора М-пос-ледовательности использовались при его вычислении. Адреса, по которым находятся оценки ординат ИПФ h[j] в векторе спектральных коэффициентов Уолша определяются так: h0 = c0 и h[j] = ck , k = 2j при j
Процесс идентификации связан с автоматическим управлением объектом исследования, оборудованием для подачи тест-сигнала и сбора данных, обработкой данных. Это удобно осуществлять в специализированной среде программирования LabVIEW [8]. Разумно и подготовительную работу делать в той же среде. Автором был разработан несложный виртуальный прибор для определения ординат ИПФ h[j] линейного динамического объекта при его возбуждении тест-
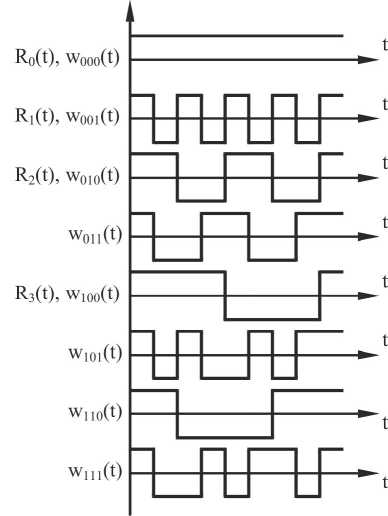
Рис. 3. Функции Уолша, упорядоченные по Адамару сигналом на основе двоичной М-последователь-ности. На рис. 4 приведен фрагмент лицевой панели виртуального прибора, на рис. 5 часть блок-схемы.
В разработанном виртуальном приборе динамический объект моделировался набором ординат ИПФ (100, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 и 12). На рисунке 4 представлено состояние лицевой панели виртуального прибора после проведения идентификации. Использовалась М-пос-ледовательность с характеристическим полиномом х8 + х6 + х5 + х4 + 1, который задан в двоичной форме. Ординаты ИПФ полностью восстановлены, указаны их адреса в массиве спектральных коэффициентов Уолша.
ВЫВОДЫ
При вычислении оценок ординат ИПФ линейных динамических объектов при возбужде-
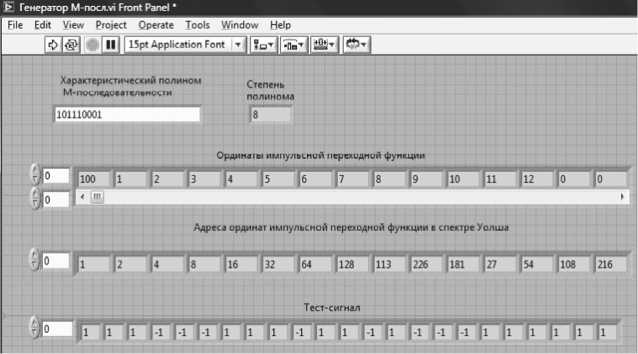
Рис. 4. Лицевая панель виртуального прибора
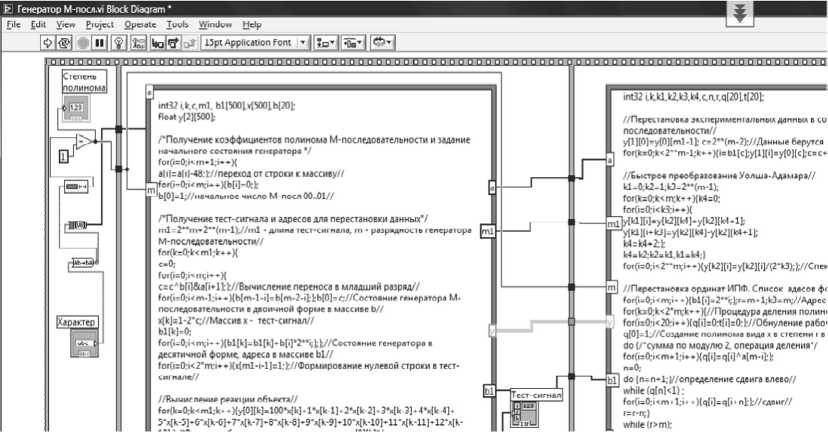
Рис. 5. Часть блок-схемы виртуального прибора
нии их тест-сигналом на основе двоичных М-последовательностей используется эффективный алгоритм быстрого преобразования Уолша-Адамара. При этом необходимо в зависимости от вида характеристического полинома М-последо-вати произвести перестановки компонентов в векторах реакции объекта и спектральных коэффициентов Уолша. В статье предложен более простой алгоритм определения соответствия между оценками ординат ИПФ и спектральными коэффициентами, полученными в результате БПУ, не требующий генерации всего плана эксперимента размерностью 2 n • 2 n .
Список литературы Быстрый алгоритм определения ординат импульсной переходной функции при возбуждении динамического объекта тест-сигналом на основе двоичной м последовательности
- Ikonen E. Advanced process identification and control. New York: Marcel Dekker Inc., 2002. 316 p.
- Яковлев В.Ф. Выбор характеристического полинома двоичной М-последовательности для идентификации нелинейного динамического объекта//Известия Самарского научного центра РАН. 2011. Т.13. 4. С.133-135.
- Cohn M., Lempel A. On fast M-sequences transforms//IEEE Trans Inform. Theory. -1977. IТ -23. C.135-137.
- Jens Hee Impulse response measurements using MLS//Bruel & Kjær, Denmark. -2003. 16 pp. URL: http://jenshee.dk (дата обращения 18.11.2011).
- Perrett M. Implementation of a M-sequence pseudo random binary sequence audio measurement system based on the Hadamard transform//University College London. "2010. 4 pp. URL: http://www.ee.ucl.ac.uk/lcs/previous/LCS2010/lens2010_submission_25.pdf (дата обращения 18.11.2011).
- Davies W.D.T. System identification for self-adaptive control. New York: Wiley"Interscience, 1970. 290 р.
- Залманзон Л.А. Преобразования Фурье, Уолша, Хаара и их применение в управлении, связи и других областях. М.: Наука, 1989. 496 с.
- Тревис Дж. LabVIEW для всех. М.: ДМК Пресс, 2005. 540 с.
