Численно-аналитическое решение задачи оптимального управления

Автор: Охорзин В.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 3 (20), 2008 года.
Бесплатный доступ
Рассмотрен численно-аналитический метод решения задач оптимального управления нелинейными системами, описываемыми обыкновенными дифференциальными уравнениями, в вычислительной среде MathCAD.
Короткий адрес: https://sciup.org/148175709
IDR: 148175709 | УДК: 5179775
Numerically-analytical decision of optimal control problem
The numerically-analytical method of the decision of optimal control problems by the nonlinear systems described by the ordinary differential equations, in computing MathCAD environment is considered.
Текст научной статьи Численно-аналитическое решение задачи оптимального управления
Современные вычислительные среды позволяют использовать как символьные, так и численные вычисления. При нахождении решения задач оптимального управления часто приходится проводить громоздкие символьные вычисления при сведении задачи оптимального управления к двухточечной краевой задачи. В данной статье рассмотрена автоматизация решения задачи оптимального управления с помощью вычислительной среды MathCAD, исходными данными для которой служит только постановка задачи.
Постановка задачи. Пусть задана система дифференциальных уравнений dx dX = f (x, u, t), x e Rm, dt (1)
u e Rn , t e [ tn , t k ] ,
f(t, x):=
tn:= 0 tk:= 1 xn:
1+ x1 5
t • x 2 + u Г 1 "
xk:
Д"
Подынтегральная функция в критерии оптимальности (2)
F(x, u):= (2 • x 0 )2 + x 1 2 + u2
Эти операторы являются исходными данными в задаче оптимального управления. Следующий оператор сим-вольно вычисляет гамильтониан (3) (результат символьных вычислений здесь и далее справа от стрелки):
где x - состояние системы; u - управление; t - время; tn , t k - начальное и конечное время. Необходимо перевести систему из начального состояния x ( tn ) = xn в конечное состояние x ( tk ) = x k с минимальным значени-
- F(x,u)+
P 0
L p i j
H(x, u, p):=
" T . 5
• f(t , x) ^ (u + t • x2) • P 1 +
+ (x1+1) • Р о - (2 • Хо) 2 - u2
^^^^^™
x 1 2
ем критерия оптимальности t k
I = j F ( x , u ) dt ^ min . t u
n
Следующие три оператора определяют структуру оптимального управления исходя из условия стационарности гамильтониана (5):
dHu:= H(x, u, p)
du
Для решения этой задачи составляют гамильтониан [1]
H = — F ( x , u ) + ( p • f ( x , u , t )) , (3)
где p - вектор сопряженных к вектору x переменных, и удвоенную систему двухточечной краевой задачи опти
мального управления
dx
— = f ( x , u , t ), dt
dp = d H dt d x .
pp uopt:= dHu solve, u ^ -2 uopt ^ -2
В программах MathCAD невозможно выполнить символьное дифференцирование по индексной переменной d H x k , поэтому для вычисления частных производных--- d xk в записи гамильтониана приходится сделать подстановку
Для этой системы дифференциальных уравнений заданы n постоянных интегрирования x ( tn ) = xn на левом конце и n постоянных интегрирования x ( t k ) = x k на правом конце траектории x ( t ) . Для замыкания системы (4) применяют условие стационарности гамильтониана
с помощью оператора substitute вместо индексных переменных x 0 , x 1 простых переменных x 0, x 1 (по умолчанию нумерация в MathCAD начинается с нуля):
H:= H(x, u, p) substitute, x0= x0,x 1 = x1 ^ u • p 1 + x1 p0
- (2 • Х о )2
-
^в
-
u2 - x12+t • x02 • P 1 +P 0
= 0 ^ u 0( x , p ) d u
и, используя (5), исключают из уравнений (4) функцию управления u ( t ) .
Символьно-численная реализация алгоритма. Приведем реализацию алгоритма на примере нелинейной нестационарной системы второго порядка. Правые части дифференциальных уравнений (1), временной интервал,
п d H
Далее вычислим частные производные -- по про- dxk стым переменным, используя обратную подстановку:
dHx0:= d H dx0
dHx0:= dHx0substitute,
начальное и конечное состояние имеют следующую запись в системе MathCAD [2] (здесь и далее для записи операторов MathCAD используется прямой шрифт):
x0 = x0, x1 = x 1 ^ t P21 x 0 - 8 • x 0
dHx1:= H dHx1:= dHx1 substitute, dx1
x0 = x0,x1 = x 1 ^ p0 - 2 - x 1
Теперь есть возможность вычислить правые части краевой задачи (4):
f(t, x)0
Fp(x):=
f(t, x)1
- dHx0
ния пройдут автоматически. Например, для задачи с начальными данными
_ . rin(x 1 )+cos(x o ) f(t, x):= t*sin(xo)+u
- dHxl
Fp(x):=Fp(x) substitute,
u = uopt ^
x1+1
t • x 2 + p i 0 2
8 • x 0 - 5 • t • P l • xo 2 • x l - P o
Для численного решения краевой задачи выразим правые части только через вектор х:
Fp(t, x):=Fp(x) substitute,
P o = x2 ,P i = x3 ^
8 • x o
x1+1
5x t • x2+— 02
5 • t • x 3 • x 2
^^^^^^.
2 • x1 - x 2
Итак, все готово для численного решения краевой задачи методом пристрелки. Для этого используем подпрограмму sbval, которая определяет недостающие начальные условия а для двух последних уравнений в (4), начиная с начального приближения v, после чего задача сведется к задаче Коши вместо двухточечной краевой задачи:
v:=
x:= stack(xn, v)
f1(tn,v):= stack(xn, v)
f2(tk,x):=
xo - xko x1 - xk1
a:= sbval(v,tn,tk,Fp,f1,f2) a=
- 32.113
- 1С.732
Интегрируем численно задачу Коши с известными
начальными условиями у на левом конце:
x 0
a 1
z:= rkfixed(y, tn, tk, 50, Fp) i:= 0..50
Получаем оптимальный процесс (рис. 1).
Обсуждение полученных результатов. Имея соответствующую программу, предложенную выше, пользователю для решения конкретной задачи с системой второго порядка необходимо набрать только условия задачи: правые части дифференциальных уравнений, интервал времени, начальные и конечные условия, а также критерий оптимальности (операторы (6), (7)). Далее как символьные, так и численные вычисле-
tn:= 0 tk:= 1 xn:
" 1 "
xk:
" 2 "
F(x, u):=u2
правые части системы получились следующими: Fp(t, x):=Fp(x) substitute, p0=x2,p1= cos(xo) + ln(x1)
t • sin(x o ) + X 3
= x3 ^
sin(xo) • x 2 -
-
а оптимальный процесс представлен ниже (рис. 2).
t • cos(xo) • x3
x 2
x1
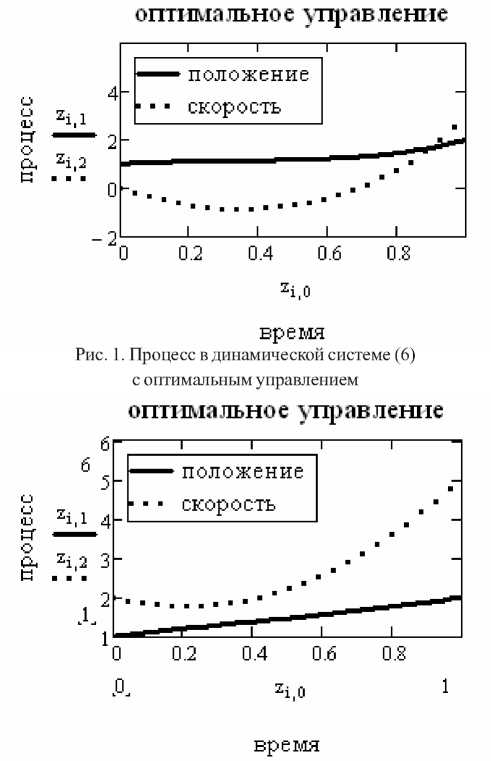
Рис. 2. Процесс в динамической системе (8), (9) с оптимальным управлением
Система более высокого порядка потребует больших размерностей векторов и введения дополнительных операторов для вычисления производных, аналогичных приведенным выше.
Следует иметь в виду, что далеко не каждая задача может быть решена предложенным выше способом. Первая
сложность может быть связана с тем, что программа символьного решения solve может не найти точного решения, особенно тогда, когда его нет. В этом случае придется дH искать решение уравнения — = 0 ^ u 0(x p) числен-д и но. Вторая сложность заключается в трудности решения краевой задачи программой sbval методом пристрелки. В этой программе происходит минимизация ошибки между требуемым и текущим положением системы в конечный момент времени за счет подбора начальных условий для сопряженных переменных p . Решение такой задачи часто зависит от выбора начальных значений v. Наконец, для нелинейных систем, в отличие от линейных, область решения не всегда принадлежит всему пространству Rn . Так, в системе (8) присутствует натуральный логарифм ln(x), что исключает значения x < 0 .
Современные вычислительные среды позволяют автоматизировать решение многих задач, требующих как численных, так и аналитических вычислений. Среда MathCAD является одной из наиболее приспособленных сред для решения таких задач.
