Численные методы моделирования транспортных потоков при исследовании и оптимизации движения на управляемых перекрёстках

Автор: Бабичева Т.С.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Математическое моделирование и управление
Статья в выпуске: 1 (25) т.7, 2015 года.
Бесплатный доступ
В статье описываются численные методы математического моделирования транспортных потоков к решению задач об оптимизации светофорных режимов на регулируемых перекрёстках. Поток автомобилей на многополосной дороге описывается пуассоновскими процессами. В работе введено, обосновано и рассчитано понятие «эффективного числа полос», характеризующего максимальный поток автомобилей при различных светофорных режимах.
Транспортные потоки, многополосные дороги, светофоры, регулируемый перекресток, оптимизация, высокая загрузка, численные методы
Короткий адрес: https://sciup.org/142186048
IDR: 142186048 | УДК: 519.688
Текст научной статьи Численные методы моделирования транспортных потоков при исследовании и оптимизации движения на управляемых перекрёстках
Математическое моделирование потоков автомобильного транспорта, начало развиваться с середины ХХ-го века и в наши дни становится всё более актуальным в связи со стремительным развитием больших городов, их инфраструктуры и растущим с каждым годом числом автомобилей на. душу населения. В процессе развития теории движения автотранспорта. сформировалось два. основных подхода, к этой проблеме [1].
Первый из них, макроскопический, рассматривает автомобильную среду на. трассе как нечто цельное, обычно — как слабосжимаемую жидкость. Второй подход, микроскопический, рассматривает каждый автомобиль как отдельную частицу со своей скоростью и конечной целью.
В данной работе в основном используются численные методы микроскопического моделирования.
Методы компьютерного моделирования универсальны тем, что позволяют численно просчитывать модели любой сложности, но зачастую эти расчёты требуют использования больших вычислительных мощностей и потому не всегда, подходят для управления в реальном времени. Для более гибкого их применения используются упрощающие условия, в том числе сведение задач к однополосному макроскопическому моделированию. Но для расчетов заранее известных величин и выведения эмпирических зависимостей необходимо использование микроскопического моделирования.
Подход со стороны численного моделирования, например, активно используются коллективом ИПМ РАН, в частности, в работе [2]. В данной работе, к примеру, было использовано применение теории клеточных автоматов к решению задач о моделировании движения на. управляемом перекрёстке.
Следует отметить, что зачастую существующие как макро-, так и микромодели рассматривают только движение по однополосным трассам.
Для того чтобы полученные результаты можно было использовать, необходимо с помощью вышеуказанных методов изучить влияние длительностей светофорных фаз и светофорных режимов на такие величины, как средняя пропускная способность на перекрёстке, среднее время ожидания, длина скапливаемых очередей по различным направлениям дорог на. перекрёстке. Это позволит найти оптимальные правила, функционирования светофоров, минимизирующие данные величины.
2. Сокращения и обозначения
В работе применяются следующие сокращения и обозначения:
-
• АТС - автотранспортное средство,
-
• с - сигнальный цикл,
-
• сі - время длительности первой фазы,
-
• С2 - время длительности второй фазы,
-
• сз - время длительности третьей фазы,
-
• С4 - время длительности четвертой фазы,
-
• (/ - поток входящего трафика,
-
• S - максимальный поток проходящего перекресток трафика,
-
• СРТ - Cars per time, среднее количество проходящих перекрёсток автомобилей за 1 секунду.
-
3. Компьютерное микроскопическое моделирование движения на перекрёстке
3.1. Описание используемой модели
В данной статье рассматривается построенная автором модель с дискретизацией времени, обобщающая модель Трайбера на случай многополосных дорог, рассмотренная в [3,4].
В этой модели для каждой машины заданы желаемая скорость от 0 до некоторой величины V max, вели чина d — расстояние между текущей машиной и следующей перед ней, V — скорость текущей машины. Правила обновления задаются моделью Трайбера.
Ускорение в модели IDM есть непрерывная функция, учитывающая различные модели вождения для всех скоростей как в шоссейном, так и в городском трафике. Кроме расстояния между АТС s (от бампера до бампера) и актуальной скорости г, модель учитывает также разницу между скоростями. Функция ускорения в данной модели определяется фор мулой
q idm ( s,v, А г ) = — = а
1 - ( г^5 - ( s * ( г, А г ) )
s * ( г, А г ) = s 0 + гТ +
г А г
2 ^ 0Ь‘
В этом выражении стратегия ускорения на свободной дороге гугее(г) = а[1 — (г/го)5] сочетается со стратегией торможения Гbrake(s,г, Аг) = —a(s*/s)2, которая становится превалирующей, когда промежуток до лидирующего АТС перестаёт быть значительно большим, чем эффективный желаемый промежуток s*(г, Аг). Свободное движение характеризуется желаемой скоростью го, максимальным ускорением а и показателем степени 6, определяющим, как ускорение уменьшается с ростом скорости ( 6 = 1 соответствует линейному уменьшению). Параметры IDM го, Т, so и b имеют приемлемую интерпретацию, они обоснованы, измеримы эмпирически и имеют реалистические значения [5].
Желаемые скорости изначально распределены по Гауссу с ограничением максимального и минимального значений скорости и определяются по плотности распределения:
/ W =
е
(х-ц) 2 ст 2
где ц — математическое ожидание, указывающее абсциссу максимума функции распределения, а и2 — дисперсия. Математическое ожидание в данном случае есть средняя скорость, дисперсия принята за 0.3 от средней скорости.
Для моделирования многополосного движения приведенная выше модель была обобщена на двумерный случай. В обобщенной модели процесс обновления состояний автомобилей делится на два подшага. На первом подшаге для каждой машины выясняется возможность и необходимость смены полосы, при этом проверяются следующие условия: АТС находится в зоне, где разрешена смена полосы в соответствии с правилами дорожного движения, смена полосы ведет к увеличению скорости АТС (снижению плотности) или необходима для достижения цели, а также удовлетворяет правилам безопасности.
Далее производится смена полосы с некоторой вероятностью. Этот подшаг выполняется параллельно для всех машин.
На втором подшаге производится движение вперед по каждой полосе по правилам однополосного движения, описанным ранее. Конфликт, когда две машины с крайних полос желают сместиться в среднюю и занять одно и то же место, решён разрешением перестраиваться вправо только на четных шагах, а влево — только на нечетных.
Алгоритм, предлагаемый в данной работе, обеспечивает возможность достижения цели. Целями автомобилей при многополосном движении могут быть, например, съезд с дороги или поворот в определенную сторону на светофоре. Цели у автомобилей обязательны и поменять их они не могут. Распределение целей для каждой конкретной задачи определяется индивидуально. В рамках данной модели въезды и съезды описываются как источники и стоки. Таким образом, если цель достаточно близко, машины сворачивают на целевую полосу при первом удобном случае и больше из этой полосы не уходят. Может возникнуть ситуация, когда водитель не успевает перестроиться в нужную полосу до самого достижения цели. В таких случаях ему придется остановиться в соседней от цели полосе и ждать возможности «вклиниться» в целевую полосу. При этом он может заблокировать продвижение других машин вперед на текущей полосе.
Дистанция, начиная с которой водители пытаются намеренно перестроиться в целевой ряд, взята из общих соображений и, вообще говоря, зависит от плотности потока. В различных задачах она обычно составляет 75-200 метров [2,7].
При моделировании движения на перекрёстке каждому автомобилю предписывается своя цель — после прохождения перекрёстка оказаться на заданной дороге. На пересечении дорог стоят светофоры, которые пропускают машины в определенных направлениях в определенные моменты времени. Порядок их переключения и возможность пропуска в различных направлениях соответствуют некоторому реальному объекту. По условиям задачи потоки в различных направлениях могут изменяться. Каждое направление на перекрестке описывается как отдельная структура — «дорога».
Машины на каждой дороге ведут себя в общем независимо от машин на других дорогах, за исключением самого перекрестка. Сам перекресток просматривается машинами со всех дорог. При передвижении по перекрестку и вблизи перекрестка машины одной дороги учитывают положение машин других дорог на перекрестке для следования правилам безопасности. В момент поворота машина меняет дорогу, то есть она исчезает с исходной полосы и появляется на полосе назначения в соответствующем месте, сохраняя все свои характеристики. В рамках модели машина должна полностью сбросить скорость, чтобы совершить поворот.
Таким образом, выполняется следующий алгоритм:
-
1) за ж метров до светофора происходит перестроение из полосы в полосу по правилам, описанным ранее (ж тоже определяется согласно этим правилам), или запрет перестроения, если это необходимо для поворота (согласно правилам дорожного движения);
-
3) при следующих условиях происходит дополнительное снижение скорости:
если машина собирается поворачивать на перекрестке и находится в пределах 75 метров от поворота, то ее скорость ограничивается Vtlirn = 40 км/ч. При достижении точки поворота машина останавливается.
-
Учет светофорного режима: машины сбрасывают скорость при приближении к горящему красному сигналу светофора: на расстоянии 50 метров скорость ограничивается 40 км/ч, на расстоянии 30 метров — 10 км/ч;
4) случайные возмущения не рассматриваются;
5) перемещение автомобилей с учётом изменений скорости, возникших на шагах 3, 4;
6) поворот. Автомобили, находящиеся на точке поворота и имеющие соответствующую цель, меняют дорогу (поворот происходит мгновенно, потери времени включены в ограничения скорости перед светофором);
7) начинается новый временной шаг.
3.2. Некоторые результаты при моделировании управляемых перекрёстков
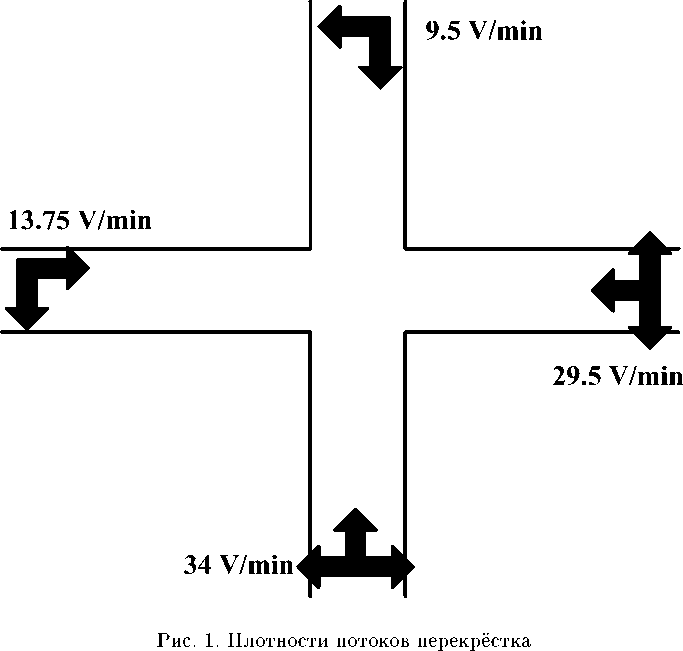
Был рассмотрен перекресток, рассмотренный в работе [2] с указанными неравномерными потоками (см. рис. 1).
Для указанного светофора существуют 4 режима работы, показанные на рис. 2. Для верхней дороги:
-
• q = 0 , 16 автомобилей с.
-
• фаза 1 запрещает движение,
-
• фаза 2 запрещает движение,
-
• фаза 3 запрещает движение,
-
• фаза 4 разрешает движение автомобилей по всем направлениям.
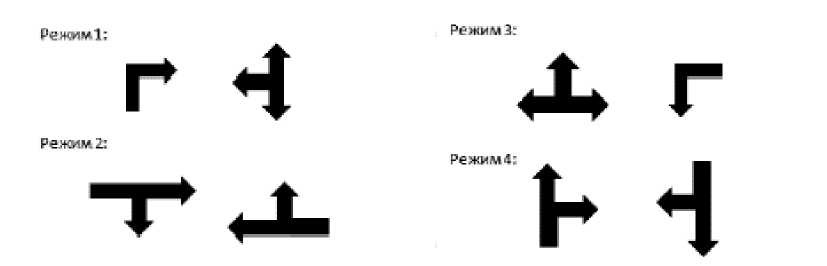
Рис. 2. Режимы работы светофора.
Результаты моделирования представлены в табл. 1.
Таблица!
4 режима для верхней дороги
|
С1, с |
С2, С |
сз, С |
С4, С |
СРТ |
|
90 |
90 |
45 |
45 |
0.11 |
|
60 |
60 |
60 |
60 |
0.14 |
|
90 |
60 |
90 |
60 |
0.12 |
|
45 |
45 |
90 |
90 |
0.14 |
|
45 |
45 |
60 |
60 |
0.15 |
Для левой дороги:
-
• q = 0 , 23 автомобилей с.
-
• фаза 1 запрещает движение,
-
• фаза 2 запрещает движение,
-
• фаза 3 разрешает движение автомобилей по всем направлениям,
-
• фаза 4 запрещает движение.
Результаты моделирования представлены в табл. 2.
Т а б л и ц а 2
4 режима для левой дороги
|
С1, с |
С2, С |
С3, С |
С4, С |
СРТ |
|
90 |
90 |
45 |
45 |
0.12 |
|
60 |
60 |
60 |
60 |
0.15 |
|
90 |
60 |
90 |
60 |
0.19 |
|
45 |
45 |
90 |
90 |
0.21 |
|
45 |
45 |
60 |
60 |
0.18 |
Для правой дороги:
-
• q = 0 , 492 автомобилей с.
-
• фаза 1 разрешает движение автомобилей по всем направлениям,
-
• фаза 2 разрешает движение вверх и направо,
-
• фаза 3 разрешает движение толвко налево,
-
• фаза 4 запрещает движение.
Результаты моделирования представлены в табл. 3.
Т а б л и ц а 3
Режимы работы для правой дороги
|
С1, с |
С2, С |
С3, С |
С4, С |
СРТ |
|
90 |
90 |
45 |
45 |
0.27 |
|
60 |
60 |
60 |
60 |
0.21 |
|
90 |
60 |
90 |
60 |
0.25 |
|
45 |
45 |
90 |
90 |
0.13 |
|
45 |
45 |
60 |
60 |
0.19 |
Для нижней дороги:
-
• q = 0 , 57 автомобилей с.
-
• фаза 1 разрешает движение только направо,
-
• фаза 2 разрешает движение автомобилей по всем направлениям,
-
• фаза 3 запрещает движение,
-
• фаза 4 разрешает движение вверх и направо.
Результаты моделирования представлены в табл. 4.
Т а б л и ц а 4
Режимы работы для нижней дороги
|
С1, с |
С2, С |
С3, С |
С4, С |
СРТ |
|
90 |
90 |
45 |
45 |
0.17 |
|
60 |
60 |
60 |
60 |
0.19 |
|
90 |
60 |
90 |
60 |
0.24 |
|
45 |
45 |
90 |
90 |
0.26 |
|
45 |
45 |
60 |
60 |
0.23 |
Поскольку нас интересует общая пропускная способность перекрестка, найдём суммы всех СРТ по различным направлениям (табл. 5).
Меняя длительность светофорных режимов, можно повысить пропускную способность перекрёстка, то есть увеличить среднее количество автомобилей, пересёкших перекрёсток за 1 секунду. Полученные результаты позволяют сделать следующие выводы: одинаковая продолжительность всех светофорных режимов не обеспечивает максимальную пропускную способность. Кроме того, режим 1 разрешает пересечение перекрёстка автомобилям, движущимся по направлениям с максимальными входными потоками, однако значительное относительное увеличение длительности этого режима не ведёт к увеличению пропускной способности перекрёстка (можно сравнить строки 1 и 4).
В отличие от подобной ситуации, рассмотренной в статье [2], оптимальным из рассмотренных режимов работы светофора является режим 3 (длительность фаз 90-60-90-60).
Т а б л и ц а 5
Режимы работы для всех дорог
|
с1, сек |
с2, сек |
сз, сек |
с4, сек |
СРТ |
|
90 |
90 |
45 |
45 |
0.67 |
|
60 |
60 |
60 |
60 |
0.68 |
|
90 |
60 |
90 |
60 |
0.80 |
|
45 |
45 |
90 |
90 |
0.74 |
|
45 |
45 |
60 |
60 |
0.75 |
При наличии грузовых автомобилей в количестве, равном 4 процентам, были построены зависимости пропускной способности перекрестка от длительности светофорных фаз. Длину дороги в данном случае полагали равной 2 км, расстояние принудительного перестраивания — 200 метров.
Для каждого из направлений перекрёстка, рассмотренного в предыдущем разделе, произведены вычислительные эксперименты. Была выбрана сетка значений длительности каждой фазы в 30, 45, 60, 75 и 90 секунд. Таким образом, вычислительный эксперимент проводился для 625 различных комбинаций фаз светофора. Потоки не были изменены по сравнению с предыдущим разделом. Моделирование производилось по 10 раз для каждой комбинации фаз, в итоговую таблицу заносилось среднее значение.
Т а б л и ц а б
Зависимость совокупной пропускной способности потока для перекрёстка, сортировка по убыванию параметра СРТ
|
С1, с |
С2, С |
сз, с |
с4, С |
СРТ |
|
60 |
30 |
45 |
30 |
0.737 |
|
45 |
30 |
30 |
30 |
0.737 |
|
30 |
75 |
45 |
30 |
0.737 |
|
45 |
60 |
45 |
30 |
0.736 |
|
45 |
45 |
45 |
30 |
0.735 |
|
75 |
30 |
45 |
30 |
0.735 |
|
90 |
60 |
45 |
30 |
0.734 |
|
60 |
30 |
30 |
30 |
0.734 |
|
90 |
75 |
30 |
30 |
0.733 |
|
45 |
30 |
45 |
30 |
0.731 |
|
75 |
30 |
45 |
45 |
0.731 |
|
30 |
45 |
45 |
30 |
0.730 |
|
30 |
30 |
30 |
30 |
0.729 |
|
45 |
75 |
45 |
30 |
0.729 |
|
75 |
60 |
30 |
30 |
0.728 |
|
30 |
30 |
45 |
30 |
0.727 |
|
• • • 45 |
• • • 45 |
• • • 30 |
• • • 90 |
• • • 0.585 |
|
30 |
30 |
45 |
90 |
0.584 |
|
30 |
30 |
60 |
90 |
0.584 |
|
45 |
30 |
30 |
90 |
0.566 |
|
30 |
30 |
30 |
90 |
0.560 |
Табл. 6 представляет из себя фрагмент полной отсортированной по убыванию общей пропускной способности таблицы результатов вычислительного эксперимента, состоящей из 625 строк. В данном фрагменте приведены несколько результатов из верхней части — для наибольших значений и нижней части — для наименьших.
Сравним величины пропускной способности перекрестка в лучшем и худшем случаях. Найдём среднюю пропускную способность перекрестка за 25 минут, то есть 1500 секунд модельного времени.
Полученная разница в 25% играет достаточно большое влияние на указанных интенсивностях потоков, что показывает, что оптимальное управление светофорными фазами может значительно улучшить транспортную картину.
Полученные распределения фаз как близкие к оптимальным, так и близкие к неоптимальным при заданных входящих потоках было решено проверить на устойчивость к небольшим изменениям интенсивностей входящих потоков с различных сторон. Данные, указанные в таблице, показывают, что пропускная способность перекрестка изменяется при данных изменениях не очень сильно (данные, которые показывали оптимальные распределения фаз, продолжают их показывать). Поэтому наиболее оптимальными в плане как устойчивости, так и пропускной способности являются варианты, показывающие наилучший результат на изначальных интенсивностях потоков.
Т а б л и ц а 7
Зависимость совокупной пропускной способности потока от вариации плотностей потока
|
С1, с |
С2, С |
С3, с |
С4, С |
Orig |
92 — 2 |
9з — 5 |
93 + 5 |
94 — 5 |
94 + 5 |
|
30 |
30 |
30 |
30 |
0.729 |
0.755 |
0.724 |
0.740 |
0.740 |
0.733 |
|
30 |
30 |
30 |
75 |
0.594 |
0.591 |
0.597 |
0.589 |
0.588 |
0.584 |
|
30 |
30 |
30 |
90 |
0.560 |
0.565 |
0.562 |
0.563 |
0.568 |
0.562 |
|
30 |
30 |
45 |
30 |
0.727 |
0.740 |
0.732 |
0.721 |
0.720 |
0.720 |
|
30 |
45 |
30 |
30 |
0.716 |
0.721 |
0.724 |
0.724 |
0.734 |
0.735 |
|
30 |
45 |
45 |
30 |
0.730 |
0.738 |
0.736 |
0.736 |
0.734 |
0.728 |
|
30 |
60 |
30 |
90 |
0.587 |
0.588 |
0.588 |
0.588 |
0.594 |
0.580 |
|
45 |
30 |
30 |
30 |
0.737 |
0.727 |
0.732 |
0.731 |
0.734 |
0.731 |
|
45 |
30 |
30 |
90 |
0.566 |
0.576 |
0.577 |
0.569 |
0.575 |
0.568 |
|
45 |
30 |
45 |
30 |
0.731 |
0.734 |
0.735 |
0.734 |
0.728 |
0.725 |
|
45 |
45 |
45 |
30 |
0.735 |
0.728 |
0.731 |
0.716 |
0.728 |
0.717 |
|
45 |
45 |
90 |
90 |
0.629 |
0.639 |
0.624 |
0.629 |
0.629 |
0.631 |
|
90 |
90 |
60 |
60 |
0.700 |
0.690 |
0.700 |
0.695 |
0.694 |
0.688 |
Табл. 7 показывает, что при колебаниях потока изменение пропускной способности невелико, то есть моделируемая система ведёт себя устойчиво.
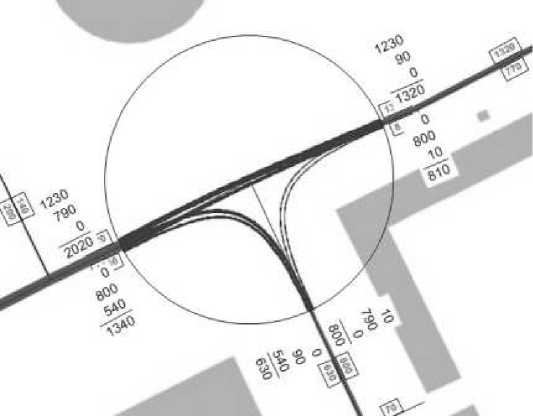
Рис. 3. Схема, перекрёстка, улиц Уральской и Крупской в г. Перми
Был рассмотрен реальный перекресток г. Перми на пересечении улиц Уральской и Крупской. Статистические данные по интенсивности входящих потоков и распределению целей автомобильных транспортных средств были взяты в [6].
На рис. 3 представлена схема движения транспорта на этом перекрёстке, а также приведены интенсивности потоков в утренние часы пик. Как видно из схемы, в отличие от предыдущей задачи, в данном случае цели АТС распространены не равномерно.
На рис. 4 представлены схемы фаз движения по данному Т-образному перекрёстку.
Phase 3
Phase 1

Phase 3
Рис. 4. Схемы движения по Т-образному перекрёстку в ходе фаз работы светофора
Интенсивность потоков АТС в утренние часы представлена на рис. 5, а в вечерние часы — на рис. 6.
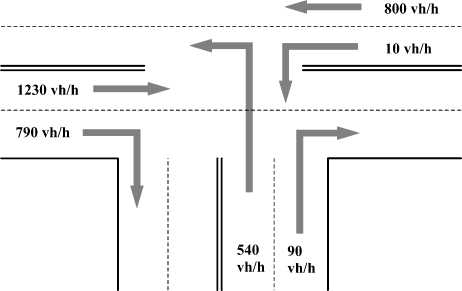
Рис. 5. Интенсивность потока АТС в утренние часы пик
Ю70АТС/
1ОАТС/Ч
860 АТС/ч
50 АТС/'T
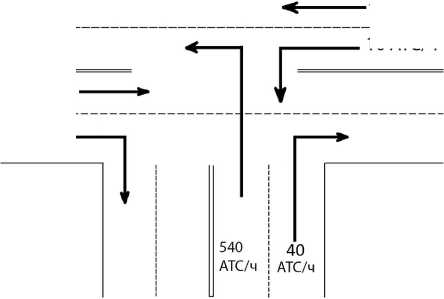
Рис. 6. Интенсивность потока АТС в вечерние часы пик
Для данной задачи было решено рассчитать оптимальное распределение фаз светофора в зависимости от входящих потоков. Решение этой проблемы помогло бы создать интеллектуальное управление светофорными режимами, ориентируясь на статистические данные потоков, движущихся по каждому из направлений.
Расчеты проводились по сетке 30-45-60-75-90 секунд для каждого направления. Вычисления проводились на кластере. По каждому направлению было проведено 16 независимых расчётов, которые затем усреднялись. В табл. 8 приведены некоторые полученные результаты для утренних часов, а в табл. 9 — для вечерних часов.
Т а б л и ц а 8
Зависимость совокупной пропускной способности потока Т-образного перекрёстка, утренние часы, сортировка по убыванию параметра СРТ
|
С1, с |
С2, С |
С3, с |
СРТ |
|
30 |
90 |
30 |
0.725 |
|
45 |
90 |
30 |
0.715 |
|
30 |
75 |
30 |
0.706 |
|
60 |
90 |
30 |
0.702 |
|
30 |
60 |
30 |
0.691 |
|
45 |
75 |
30 |
0.687 |
|
30 |
90 |
45 |
0.684 |
|
45 |
90 |
45 |
0.682 |
|
75 |
90 |
30 |
0.680 |
|
60 |
75 |
30 |
0.669 |
|
• • • 75 |
• • • 30 |
• • • 90 |
• • • 0.478 |
|
45 |
30 |
90 |
0.477 |
|
90 |
30 |
30 |
0.475 |
|
30 |
30 |
90 |
0.471 |
Т а б л и ц а 9
Зависимость совокупной пропускной способности потока Т-образного перекрёстка, вечерние часы, сортировка по убыванию параметра СРТ
|
С1, с |
С2, С |
С3, с |
СРТ |
|
30 |
90 |
30 |
0,775 |
|
30 |
75 |
30 |
0,770 |
|
45 |
90 |
30 |
0,769 |
|
60 |
90 |
30 |
0,758 |
|
30 |
60 |
30 |
0,755 |
|
45 |
75 |
30 |
0,746 |
|
45 |
90 |
45 |
0,740 |
|
30 |
90 |
45 |
0,739 |
|
45 |
60 |
30 |
0,730 |
|
60 |
75 |
30 |
0,730 |
|
• • • 90 |
• • • 30 |
• • • 75 |
• • • 0,505 |
|
90 |
30 |
60 |
0,504 |
|
90 |
30 |
45 |
0,492 |
|
90 |
30 |
30 |
0,488 |
Оптимальные длительности светофорных фаз в обоих случаях совпадают и составляют 30-90-30. Разброс между наилучшим и наихудшим вариантами составляет 35 процентов для утренних часов пик и 37 процентов для вечерних часов пик, что для данных потоков обозначает разницу в 914 АТС/ч и 1033 АТС/ч соответственно. Это изменение пропускной способности играет очень большую роль в образовании автомобильных заторов, поэтому целесообразность моделирования перекрестков для вычисления оптимальной длительности светофорных фаз очевидна.
В одном прогоне программы моделирования может моделироваться от 8 до 12 просчётов. Расчёт фаз светофора по сетке требовал 625 запусков основной программы, каждый из которых формировал 32 файла с выходными данными.
4. Понятие эффективного числа полос
При оценочных расчетах полезным оказывается такое понятие, как эффективное число полос, которое мы поясним простым примером. Пусть поток автомобилей движется по 6полосной дороге и наталкивается на Т-образный перекресток. Пусть треть автомобилистов хотят повернуть налево, а остальные двигаться прямо. Но одновременно поворачивать и двигаться прямо нельзя по правилам работы светофора. Тогда две левые полосы будут заниматься автомобилистами, желающими повернуть налево. Собственно, вопрос, на который дает ответ модель, почему и при каких неоговоренных здесь условиях будет именно две полосы. Таким образом, в момент включения зеленого сигнала светофора для прямого движения поток через светофор будет не максимально возможный для заданного числа полос, как говорит теория, а на треть меньше. То есть не 6000 авт./ч, а только 4000 авт./ч. Эффективное число полос равно четырём. Важно заметить, что при моделировании далеко не всегда эффективное число полос является целым (задержки на перестраивание, движение по двум полосам, нецелые пропорции и т.п.).
4.1. Численный вывод формулы для эффективного числа полос
Рассчитаем эффективное число полос с помощью численных экспериментов, проведённых с помощью ранее описанной модели.
На графике отражена зависимость между отношением текущего проходящего через перекрёсток потока к максимально возможному (когда всем АТС разрешено продолжение движения) и процентом АТС, кооторые могут продолжать движение при данной светофорной фазе для одной многополосной дороги.
Каждая точка на графике получена усреднением 64 измерений.
CPT dependency from active lines
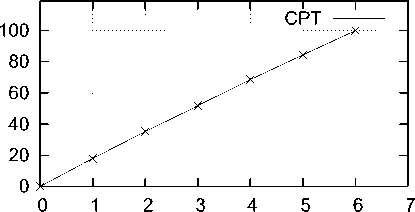
Рис. 7. Зависимость отношения проходящего потока, к максимальному от процента. АТС, которые могут продолжать своё движение
Таким образом, явно прослеживается линейная зависимость. Математическое ожидание проходящего потокаможно выразить следующей формулой:
E[Sk ] = S • |,
где к — поток АТС. которые могут продолжать движение на текущей фазе. q — поток АТС. S — поток АТС через перекрёсток в случае, когда нет запретов на движение.
5. Заключение
В настоящей работе рассматривались численные методы моделирования транспортных потоков на управляемых перекрёстках. Было рассмотрено понятие «эффективного числа полос», которое в дальнейшем позволит получать картины макроскопического поведения АТС на перекрёстках. В дальнейших публикациях данное понятие будет использовано при изучении поведения АТС на перекрёстках и с его помощью будут получены явные формулы, выражающие задержки АТС, возникающие при пересечении перекрёстка.
Исследование выполнено в рамках федеральной целевой программы «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2014-2020 годы», соглашение № 14.604.21.0052 от 30.06.2014 г. с Минобрнаукой РФ. Уникальный идентификатор проекта RFMEFI60414X0052.
Список литературы Численные методы моделирования транспортных потоков при исследовании и оптимизации движения на управляемых перекрёстках
- Введение в математическое моделирование транспортных потоков/под ред. А.В. Гасникова; с предисл. рук. департамента транспорта г. Москвы М.С. Ликсутова. -М.: МЦНМО, 2013
- Трапезникова М.А., Фурманов И.Р., Чурбанова Н.Г., Липп Р. Моделирование многополосного движения автотранспорта на основе теории клеточных автоматов//Математическое моделирование. -2011. -Т. 23, № 6. -С. 133-146
- Обидина Т.С. Решение задачи о запрете перестроения при достижении критической интенсивности транспортного потока//Современные проблемы фундаментальных и прикладных наук. Часть VII. Управление и прикладная математика: Труды 52-й научной конференции МФТИ. -Долгопрудный, 2012
- Обидина Т.С., Обидин М.В., Бабичев С.Л. Решение задачи об оптимизации светофорных режимов на регулируемых перекрестках с помощью методов микроскопического моделирования транспортных потоков//Современные проблемы фундаментальных и прикладных наук. Часть VII. Управление и прикладная математика: Труды 55-й научной конференции МФТИ. -Долгопрудный, 2012
- Kesting A., Treiber M. Calibrating car-following models by using trajectory data:Methodological study//Transportation Research Record. -2008. -2088. -P. 148-156
- Моделирование и прогнозирование движения транспортных потоков на перекрёстке ул. Уральская -ул. Крупской (http://road.perm.ru/index.php?id=894)
- Смирнов Н.Н., Киселев А.Б., Никитин В.Ф., Кокорева А.В. Математическое моделирование движения автотранспортных потоков методами механики сплошной среды. Двухполосный транспортный поток: модель Т-образного перекрестка, исследование влияния перестроений транспортных средств на пропускную способность участка магистрали//Труды МФТИ. -2010. -Т. 2, № 4. -С. 141-151
