Численный анализ влияния расстройки параметров на вынужденные колебания системы диск-лопатки турбомашин на основе модели уменьшенного порядка

Автор: Репецкий О.В., До Мань Тунг
Журнал: Вестник Восточно-Сибирского государственного университета технологий и управления @vestnik-esstu
Статья в выпуске: 5 (44), 2013 года.
Бесплатный доступ
В работе представлены вопросы математического моделирования и решения задач вынужденных колебаний диск-лопатки с расстройкой методом конечных элементов на основе модели уменьшенного порядка. Исследовано влияние расстройки параметров лопаток на резонансы колебаний.
Расстройка, вынужденные колебания, метод конечных элементов, модель уменьшенного порядка
Короткий адрес: https://sciup.org/142142757
IDR: 142142757 | УДК: 534.1:
Numerical analysis of forced vibrations of mistuned bladed disks systems of turbomachines using reduced-order model
This paper provides information on the mathematical modeling and solutions of the forced vibrations of mistuned bladed disks using reduced order model by finite element method. The authors give influence of mistuning parameters on the resonance vibrations.
Текст научной статьи Численный анализ влияния расстройки параметров на вынужденные колебания системы диск-лопатки турбомашин на основе модели уменьшенного порядка
При изучении колебаний роторов турбомашин известно, что у реальных конструкций при их изготовлении или эксплуатации всегда возникают случайные отклонения между лопатками (по массе, модулю…). Эти отклонения называются расстройкой. Расстройка сильно воздействует на отклик вынужденных колебаний. В зависимости от рабочих условий и уровня расстройки ограничение энергии на несколько лопаток может привести к повышению максимальных амплитуд и напряжений лопаток. Анализ влияния расстройки на вынужденные колебания показан в нескольких работах. В таблице 1 [5, 6, 8, 9] представлен максимальный коэффициент увеличения амплитуды колебаний.
Таблица 1
|
Год |
Автор |
Число лопаток N |
максимальный отклик с расстройкой отклик без расстройки |
|
1976 |
Whitehead [ 9 ] |
24 |
1 f 1 + \ N" 1 = 2,23 2 ( V2J |
|
1976 |
Ewins [ 5 ] |
24 |
1,21 |
|
1975 |
El-Bayoumy and Srinivasan [ 6 ] |
24 |
1,20 |
|
1984 |
Macbain and Whaley [ 8 ] |
- |
1,20 |
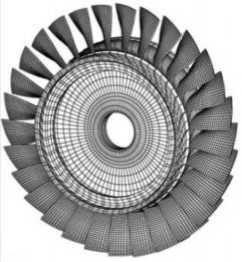
Авторы применяли статистический анализ, чтобы исследовать вынужденные колебания рабочих колес с расстройкой. Но этот метод сложно использовать для конечных элементов системы лопаток (рис. 1а).
В статье представлена методика расчета модели уменьшенного порядка (МУП) для анализа рабочих колес с расстройкой на основе одного сектора методом конечных элементов
(МКЭ) (рис. 1б).
а

б
Рис. 1. Модель конечных элементов рабочих колес: а - полный диск; б - один типичный сектор
Реализация расстройки
Расстройка моделируется путем изменения жесткостей каждой лопатки. Когда матрица жесткости каждой консольной лопатки разлагается на диагональную форму K b , тогда расстройка жесткости каждой консольной лопатки A K b вводится как [ 3 ]
AKb = Bdiag n = 1,..., N
diag A fnk к=1,..., mb
Kb ,
где Bdiag - блочно-диагональная матрица; diag - диагональная матрица; mb - число форм n=1,..., N к=1,..., mb колебаний консольной лопатки; N - число лопаток; Afk - расстройка параметров, соответствующая k-ной форме колебаний n-ной консольной лопатки, определяемая как ^k >2
A f nk = — - 1 ,
V — 7
здесь — n - расстроенная частота к -ной формы колебаний n -ной консольной лопатки и — k - настроенная частота k- ной формы n -ной лопатки.
В большинстве опубликованных исследований по расстройке системы диск-лопатки рассмотрены изменения модуля упругости как исходные данные расстроенных лопаток. Если материал каждой лопатки однороден, то расстроенный параметр A f k в уравнении (1) заменяется значением A f n , которое обозначает изменение номинального модуля упругости.
Общая схема моделей уменьшенного порядка
аб
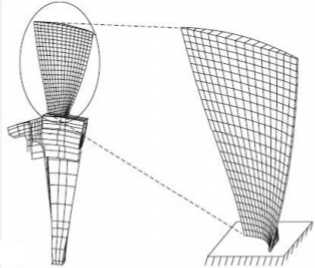
Рис. 2. Компоненты форм одного сектора: а - циклические формы для одного сектора диск-лопатки; б - нормальные формы одной консольной лопатки
Предположим, что степени свободы упорядочены так, чтобы дать блочнодиагональные формы при сборке матриц масс и жесткости всей конструкции. Они представлены в виде [ 3 ]
|
M = |
■ M d 0 " |
= |
I ® Md 0 |
, K = |
Г K d |
|
[ 0 M b . |
0 I ® M b |
L 0 |
0 I ® K d 0
=
Kb J [ 0 I ® Kb где I - единичная матрица размера N; N - число
секторов, M d , Kd - матрицы масс и
жесткости одного сектора диска; Mb, Kb - матрицы масс и жесткости одной лопатки, символ 0 обозначает оператор Кронекера, определенный в приложении А.
На рисунке 2 изображены два основных компонента форм колебаний для модели конечных элементов одного сектора диск-лопатки. Первая часть включает в себя формы колебаний одной лопатки, защемленной между диском и лопаткой (рис. 2б). Для колес без полки модальная матрица ab N идентичных лопаток является блочно-диагональной и собрана как I ®5b, где 5b - форма колебаний одной консольной лопатки. Вторая часть представляет собой формы колебаний диска, которые являются циклическими формами полной сборки, где к диску присоединены безмассовые лопатки (рис. 2а). Часть форм колебаний диска с лопаткой принадлежит степеням свободы лопатки и обозначается 5d, а часть диска - Sd. После совмещения двух частей компонентов форм колебаний получим перемещения всей структуры в виде [4]
xd xb
5d Го a +
5 d 5 b
b ,
TTTT a0 a1 ... aP I ; an - один вектор обобщенных координат, соответствующих n узловым диаметрам диска; P -максимальное число гармоник или максимальное число узловых диаметров; b - вектор обобщенных координат для всех N лопаток и b = [bT bT... bTN J , где bi - вектор обобщенных координат i-ной лопатки.
Кинетическая энергия системы может быть записана как [ 7 ]
P PP PP t=7£ a1 Tan+7 b Tb+b Tab Mb £ 8aa n+- I£ a Tad I Mb^b+- £( a Tad Mb £( 8^ .). (5)
2 n=0 2 = n 0 = 2 V n 0 = У =2 n 0
Аналогично энергия деформации системы может быть выражена как
PP
U = 7 £ 4KA + 7 b T a b K b a b b + - bT 5 b K b £ S aa.
2 n=0 2 2
PPP
+ 71 У aT5d \k ,5bb + 1У TaT5d Vy(5da A
2 I n n I b n n I b m m J
V n=0 У = 2 n 0
Применяем принцип Гамильтона t2t2
J [ dU - dT ] dt = J dW внеш dt , t 1 t 1
где внешняя работа определена как j dWBHemdt = j d [5da + 5bbJT Fdt JdaTadTFdt + j dbTebFdt, t1t1 t1t1
а F - соответственно вектор вынужденной силы степеней свобод всех лопаток при сборке. Из выражений (3 - 8) имеем уравнение в виде матрицы
Определение циклических форм колебаний [3, 7]
Матрица, представляющая собой циклические формы колебаний, определена как 3 d = ( F 0 I ) 3 d , (10)
где F - реальная матрица Фурье (см. приложение Б); I - единичная матрица размера N; 3d - форма колебаний одного сектора в циклических координатах, имеющая блочнодиагональную структуру и определена как
3 d = Bdiag 9 d , (11)
k=0,..., P где 3k = 3tc + J9ds - форма колебаний одного сектора, соответствующая k узловых диаметров; 3d c, 3ds - соответственно реальная и мнимая часть 3d и j = V-1.
Из выражений (10) и (11) можно получить форму колебаний в циклических координатах как
3d =[f,030 fc031d,+f s031ds,..., "ft0atc + "ft0C,- fN/203/2]■(12)
Определение возбуждающей силы [7]
Возбуждающие силы - гармонические функции времени, отличающиеся фазой между секторами. Фаза i -ной лопатки определена как
Ф,- ^N" 1) • О' = U,N)'(13)
где C - порядок энергии возбуждений.
Вектор внешней возбуждающей силы представлен в виде
F = {fe^1 =^2 ... fjN }T NeCec+1 0 f,(14)
где ec + 1 - (С+1)-й столбец матрицы Фурье в приложении Б; f - вектор вынужденной силы одной лопатки.
Из выражений (9) и (14) имеем
F = {FT: Ft} = {0... 0 FC 0...0 M Ft}T,(15)
( f 0 ® S ) ( ■ + 1 ® f )
( f c ® S d = + f ‘ ® S i /, ) ( ec + i ® f )
