Цифровое и широтно-импульсное управление космическим роботом при сближении с геостационарным спутником

Автор: Сомов Е.И., Бутырин С.А., Сомова Т.Е.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 5 т.22, 2020 года.
Бесплатный доступ
Рассматриваются вопросы управления космическим роботом при его сближении с информационным геостационарным спутником. В системе управления движением робота применяются двигательная установка с 8 реактивными двигателями при широтно-импульсной модуляции значений их тяги и силовой гироскопический кластер на основе 4 гиродинов с цифровым управлением. Приводятся численные результаты, демонстрирующие эффективность разработанных дискретных алгоритмов наведения и управления.
Геостационарный спутник, космический робот, сближение, управление
Короткий адрес: https://sciup.org/148312681
IDR: 148312681 | УДК: 629.78 | DOI: 10.37313/1990-5378-2020-22-5-74-78
Digital and pulse-width control of a space robot when approaching a geostationary satellite
The control problems on a space robot during its approach to an information geostationary satellite are considered. The robot motion control system uses an electric propulsion system with 8 engines at the pulse-width modulation of their thrust values and a gyroscopic moment cluster based on 4 gyrodines with digital control. Numerical results are presented that demonstrate the effectiveness of the developed discrete guidance and control algorithms.
Текст научной статьи Цифровое и широтно-импульсное управление космическим роботом при сближении с геостационарным спутником
Информационные спутники (связи, метеорологического наблюдения Земли) на геостационарной орбите (ГСО) имеют потребную длительность службы до 25 лет при наличии технического обслуживания с помощью космических роботов-манипуляторов (КРМ), в частности дозаправки топливом их электроре-активных двигательных установок (ЭРДУ). Ограничения на допустимую массу затрат топлива при выведении крупногабаритного космического аппарата (КА) на ГСО приводят к проблеме «до-выведения» КА от переходной орбиты до геостационарной с помощью бортовой ЭРДУ[1]. В статье [2] представлены суть проблемы и бюджеты вывода КРМ массой m ® 3000 кг на ГСО при его запуске с указанным «до-выведением». В системе управления движением (СУД) КРМ
применяются следующие приводы: ЭРДУ с тягой P = 0.58 Н, двигательная установка малой тяги (ДУМТ) на основе 8 реактивных двигателей (РД) с широтно-импульсной модуляцией (ШИМ) тяги Pm = 0.5 Н каждого РД (рис. 1) и силовой гироскопический кластер (СГК) по схеме 2 Scissored Pair Ensemble ( 2-SPE ) на основе четырёх гиродинов (ГД) с собственным кинетическим моментом (КМ) h g = 30 Нмс, рис. 2.
Данная статья посвящена проблемам наведения и управления пространственным движением КРМ при его сближении с геостационарным спутником (целью) с расстояния 5 км до дальности 50 м для последующей визуальной инспекции его технического состояния.
МОДЕЛИ И ПОСТАНОВКА ЗАДАЧИ
Для описания движения КА применяются геоцентрическая I е ( O e X i Y i Z i ) и солнечно-эклиптическая I s инерциальные системы координат (ИСК), обозначения { • } = col0, [ • ] = lineQ, 0*,[*] и ° ,~ для векторов, матриц и кватернионов, i = 1,2,.. m = 1 ^ m. Используются орбитальные системы координат (ОСК) Or x o y o z o КРМ с полюсом Or и цели Ot x t o y t o z t o с полюсом Ot . Вектор тяги РДУ направлен по оси O ry связанной с корпусом КРМ системы координат (ССК) Or xyz , а для инспекции цели на борту КРМ применяется телескоп с осью визирования параллельной этой же оси. Если КРМ считать твёрдым телом массой m , то модель
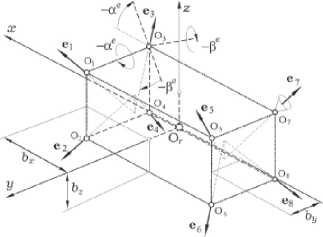
Рис. 1. Схема ДУМТ на основе восьми РД

Рис. 2. Схема 2-SPE СГК на основе четырех ГД
его движения в ИСК I е в проекции на оси ССК O r xyz имеет вид
г * + m x r = v ; m ( v * ■ m x v ) = P e + F d;
Л = Л о ю/2; J m + m x G = Mg + Me + Td, где кватернион Λ представляет ориентацию КРМ в ИСК, вектор G =J ω + H , где H – вектор КМ СГК, используются векторы тяги Pe и момента Me двигательной установки, момента Mg = —H* СГК, векторы внешних возмущений Fd, Td и символ (•) локальной производной.
При законе углового наведения робота, заданного кватернионом Л p ( t ) , погрешность ориентации его ССК Or xyz определяется кватернионом Е = ( e 0, е ) = Л p ° Л при e = {e i } , которому соответствуют матрица ошибки ориентации C e = I 3 — 2[ e x ] Q e , где Q e = I 3 e 0 + [ e x ] , вектор модифицированных параметров Родри-га a e = { a ■ } = e / (l + e 0) = e etg( Ф e/4) с ортом e e оси Эйлера и углом Ф e собственного поворота, а также вектор угловой погрешности 5ф = {5ф / } = {4 о e } .
На рис. 1 орты e p , p = 1 ^ 8 по осям сопел РД и параметры b b задают вектор р p точки O p приложения вектора тяги p -го РД. ШИМ тяги p ( t ) представляется моделью P p (t ) = Р ' PWM( t — T ^ , t s , T m ,V pr ) V t G [ t s , t s + 1 )
при периоде T U и запаздывании T ^u . Здесь P m представляет тягу, одинаковую для всех РД, ts = sT®, s G N0 = [0,1,2,...) и функции
PWM( t,t s , T m ,V ps ) =
' sign v ps t G [ t s ,t s + T ps ) ,
0 ... t G [ t s + T ps , t s + i );
T (t ) = ps m
^
sat ( T:, | v ps |)
|V ps | - T m ; |v ps | > T m .
Вектор тяги РД p p ( t ) = — pp ( t ) e p , векторы тяги P e и момента M e ДУМТ формируются как P e = s p p ( t ) и M e = s [ p p X ] p p ( t ).
Столбец Н ( в ) = h g h = S h p ( P p ) представляет вектор КМ СГК, где | h p | = 1 , p = 1 ^ 4 . При цифровом управлении скоростями ГД
U К. t ) = {u gk ( t )}, u gk ( t ) = u gk V t G [ tk , t k + 1 ) в моменты t k = kTu с периодом Tu , k g N0, вектор M g = { M i 8} управляющего момента СГК представляется соотношениями M k ( t ) = — h g A h ( P ( t ) u k ( t ) ; в ( t ) = u k ( t ) , где столбец в = {P } и матрица Якоби A h ( р ) = d h ( p ) /dp . Р
Предполагается, что СУД КРМ имеет бесплат-форменную инерциальную навигационную систему (БИНС) с инерциальным измерительным модулем гироскопов и акселерометров, которая корректируется сигналами спутников ГЛОНАСС/ GPS, а при дальности менее 500 м координаты траекторного и углового движения КРМ относительно цели определяются также оптико-электронными камерами наблюдения и лидарами [3].
Задача состоит в синтезе законов наведения и управления пространственным движением КРМ при изменении его дальности до цели с 5000 м до 50 м, а также в нелинейном анализе динамики СУД КРМ при таком сближении на основе компьютерной имитации.
АЛГОРИТМЫ НАВЕДЕНИЯ И УПРАВЛЕНИЯ
В начальный момент времени t i в ИСК известны векторы расположения и скорости поступательного движения КРМ г г ( t i ) , v r ( t i ) и цели r t ( t i ) , v t ( t i). При введении опорной круговой орбиты радиуса r r ( t i ) = const в плоскости земного экватора удобно использовать цилиндрическую систему координат (ЦСК) [4]. Здесь координатами являются значения радиали r и угла u её отклонения от произвольного направления в плоскости опорной орбиты, а также смещения z в направлении, ортогональном этой плоскости.
Пусть wr , w t и w z представляют радиальную, трансверсальную и боковую компоненты вектора управляющего ускорения КРМ, а µ – гравитационный параметр Земли. Движение КРМ при его сближении с целью (рис. 3) в центральном гравитационном поле на интервале времени t g [ t i , t f ] описывается уравнениями
2 2 r r — ru +ц / r = w ;
t 3 z ru + 2 ru = w ; z + ц z / r = w при известных краевых условиях по орбитальным переменным ЦСК. Здесь на основе аналитических соотношений [4] выполняются прогноз положения rp (t) и скорости vf (t) цели на интервале времени t е [ti, tf ] и аналитический расчет векторов rt (tf), vt (tf). Синтез закона наведения КРМ в его поступательном движении выполняется на основе параметризации его сближения в виде векторных сплайнов времени t е [ti, tf] с тремя участками постоянного управляющего ускорения для радиали r(t), угла u(t) и отклонения z(t), где ускорение отсутствует на среднем участке. Такой закон наведения определяет векторы rf (t), vf (t) и wf (t), где аналитически вычисляются моменты времени переключения ускорения wr (t), и позволяет далее вычислять разности между расположениями цели и КРМ Дг(t) = rt (t) — rr (t), их скоростями Av(t) = vt (t) - vr (t) и разности p pp p pp
Дг (t) = r (t) — rr (t), ДV (t) = Vt (t) — Vr (t).
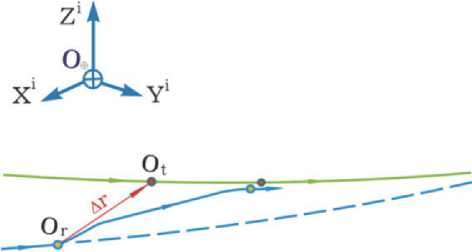
Рис. 3. Схема сближения КРМ с целью
Закон углового наведения КРМ в ИСК определяется программными значениями кватерниона Л f ( t ) , векторов угловой скорости to p ( t ) = { to f ( t )} и углового ускорения 8 f ( t ) = { 8 f ( t )} .
В дискретном алгоритме управления ДУМТ используется вектор δ ∆ r s = ∆ r s p - ∆ r s рассогласования между программной разностью A r S = A r f ( ts ) и измеренной разностью A r s = A r ( ts ) расположений цели и робота, причём значения вектора δ∆ r s формируются в ССК робота с периодом Т Ц в моменты времени ts , s е N0. В этом упрощенном алгоритме сначала вычисляется командный вектор I S импульса тяги ДУМТ на интервале времени t е [ ts , ts + 1 ) по формулам
g : + 1 = k b g : — k b Ь Д г s ;
P s = k : ( g : — k p ^); (2)
Is = TU m (Os wp + ps), а затем для его реализации с помощью ШИМ тяги всех 8 РД вычисляются длительности τps ≤τm их включения по явным соотношениям.
В алгоритме цифрового управления ориентацией КРМ с периодом Tu определяются векторы углового рассогласования εk = -δφk и угловой скорости ωk для вычисления потребного управляющего момента СГК M® в виде а1 = к^ р^ + к^ p gfpg + к6
-
g k +1 k b g k + kc e k ; 111k k u (g k + kp e k ) ; (3)
м *=ю,х Gk+j(o: ep+[о: ю p х]ю,+inj, k k k k К k К k k где вектор Gk = Jtok + Hk, а затем вектор Mg распределяется между ГД по явным соотношениям и формируется вектор цифрового управ-
■ ления uk(t) = e (t) СГК Vt е [tk, tk+j) .
НЕЛИНЕЙНЫЙ АНАЛИЗ ДИНАМИКИ СИСТЕМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ
Компьютерный анализ выполнялся для модели (1) при указанных законах наведения и управления (2), (3). В стратегии сближения КРМ с целью от 5 км до дальности 50 м предусмотрено два этапа :
-
1) подход КРМ с применением ЭРДУ и СГК на расстояние 500 м вслед за целью вдоль её орбиты, близкой к геостационарной;
-
2) сближение КРМ с целью до дальности 50 м с помощью ДУМТ и СГК, подготовка КРМ к инспекции цели с номинальной точкой стояния Ω g = 76 град ВД на ГСО с номинальным радиусом rg = 42164172.93 м.
При стандартных обозначениях перигея rp , апогея ra , наклонения i и долготы восходящего узла Ω орбиты были приняты начальные параметры орбит цели rf = r g , r a = r g + 1000 м, i = 0 , ^ = ^ g +24.46 угл. сек и робота rf = r g - 500 м, r a = rg + 2000 м, i = -20 угл. сек, Q = Q g при нулевых значениях аргументов перигея и моментов времени их прохождения. При имитации сближения робота с массой m = 3000 кг и тензором инерции J = diag(3248,2348,3640) кгм2 применялись период ШИМ тяги РД в составе ДУМТ Т Ц; = 4 с при запаздывании T Z:u = 0.25 с, период цифрового управления ГД в составе СГК Ти = 0.25 с и отсчет времени от значения t = 1 0 = 0 .
В начале этапа 1 на полуинтервале времени t ∈ [0, 70) с выполняются обработка измерений БИНС, прогноз движения цели и синтез закона наведения робота для достижения дальности 500 м до цели. Далее следуют:
-
(i) первый пространственный поворотный маневр (ПМ-1) КРМ V t е [70,170) на угол 26 град и угловая стабилизация V t е [170,270) с;
-
(ii) разгонный импульс тяги ЭРДУ V t е [270,4498) с, ПМ-2 V t е [5660,5860) с на угол 156 град, тормозной импульс тяги ЭРДУ V t е [5960,10168) с и, наконец,
t,S
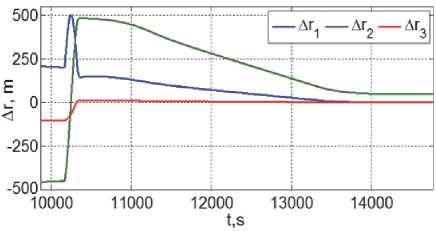
Рис. 7. Расположение цели в ССК КРМ
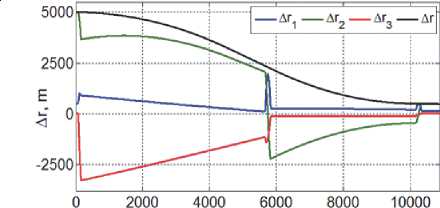
Рис. 4. Расположение цели в ССК КРМ
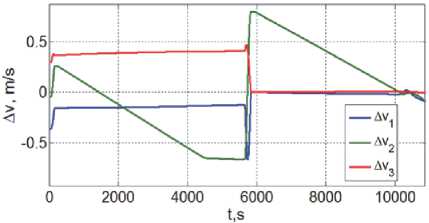
Рис. 5. Разность скоростей цели и КРМ в ССК
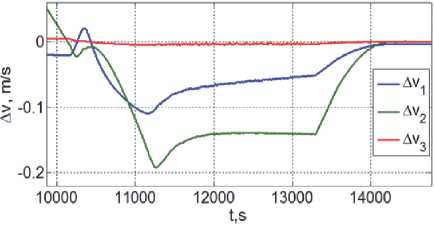
Рис. 8. Разность скоростей цели и КРМ в ССК
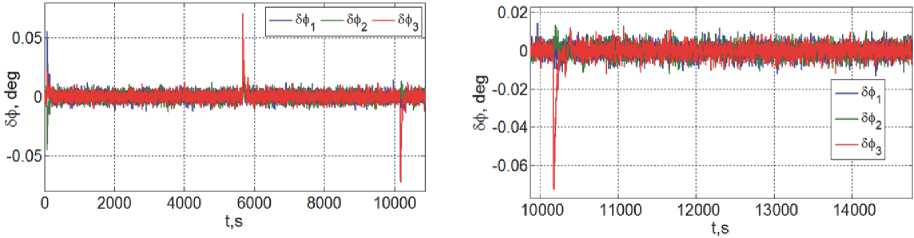
Рис. 9. Погрешности угловой стабилизации КРМ
Рис. 6. Погрешности угловой стабилизации КРМ
-
(iii) поворотный маневр ПМ-3 V t е [10168,10368) с на угол 138,7 град.
Этап 2 сближения КРМ с целью от расстояния 500 м до дальности 50 м имитировался на интервале времени t е [10368,14468] с, когда координаты пространственного движения КРМ относительно геостационарного спутника определяются бортовыми электронными приборами.
Полученные результаты приведены на рис. 4 – 9 с малым перекрытием по времени, где цветом выделены изменения переменных по рысканию (синий, ось x ), крену (зеленый, ось y ) и тангажу (красный цвет, ось z ), а модуль расстояния на рис. 4 представлен черным цветом.
ЗАКЛЮЧЕНИЕ
Кратко представлены методы наведения, цифрового и широтно-импульсного управления пространственным движением робота при его сближении с геостационарным спутником, а также численные результаты, демонстрирующие эффективность разработанных алгоритмов.
Список литературы Цифровое и широтно-импульсное управление космическим роботом при сближении с геостационарным спутником
- Spitzer A. Near optimal transfer orbit trajectory using electric propulsion // Proceedings of AAS/AIAA Spaceflight Mechanics Conference. Albuquerque. 1995, 95-215, pp. 1-10.
- Сомов Е.И., Бутырин С.А., Сомов С.Е., Сомова Т.Е. Вывод на орбиту и сближение космического робота с геостационарным спутником // Известия Самарского научного центра РАН. 2020. Т. 22. № 2. С. 125-131.
- Somov Ye., Butyrin S., Somov S., Somova T. Control of robot-manipulator during its preparation and capture of a passive satellite // Mathematics in Engineering, Science and Aerospace. 2019. Vol. 10, no. 3. P. 421-432.
- Эльясберг П.Е. Введение в теорию полета искусственных спутников Земли. М.: Либроком, 2011. 544 с.
