Цифровое управление биодинамическими системами освещения в птичниках

Автор: Шабаев Е.А., Беленов В.Н., Романовец М.М., Митяшова С.И.
Журнал: Агротехника и энергообеспечение @agrotech-orel
Рубрика: Электротехнологии, электрооборудование и энергоснабжение агропромышленного комплекса
Статья в выпуске: 1 (50), 2026 года.
Бесплатный доступ
Целью работы является анализ цифровых элементов современных систем управления биодинамическим освещением птичников и разработка рекомендаций их по проектированию. В работе использовались элементы методов системного и математического анализа, компьютерного моделирования, сведения из теории электро- и светотехники, автоматического управления. Для изменения освещенности и спектрального состава излучения светодиодных светильников в системах управления биодинамическим освещением целесообразно использовать ШИМ-управление световыми потоками светодиодов белого теплого и холодного света с частотой ШИМ-сигнала более 1 кГц и разрядностью не менее 10-ти бит. Оперативное управление и изменение настроек системы освещения рационально производить с помощью сенсорных панелей оператора или ПЛК с сенсорным экраном. Связь между цифровыми элементами системы управления рекомендуется осуществлять по интерфейсу RS-485. Для систем программного управления параметрами биодинамического освещения следует использовать цифровой ПИ-регулятор с обратной связью через датчик освещенности. При этом нужно предусмотреть апериодический цифровой фильтр сигнала измерений освещенности с постоянной времени около 125 мс.
Цифровое управление, светодиод, освещение, птичник, контроллер, регулятор
Короткий адрес: https://sciup.org/147253811
IDR: 147253811 | УДК: 628.92/.97:631.227
Digital control of biodynamic lighting systems in poultry houses
The purpose of the work is to analyze the digital elements of modern control systems for biodynamic lighting of poultry houses and develop recommendations for their design. The work used elements of methods of system and mathematical analysis, computer modeling, information from the theory of electrical and lighting engineering, automatic control. To change the illumination and spectral composition of the radiation of LED luminaires in biodynamic lighting control systems, it is advisable to use PWM to control the light fluxes of white warm and cold light LEDs with a PWM s ignal frequency o f m ore t han 1 kHz and a discharge of at least 10 bits. It is rational to perform operational control and change the settings of the lighting system using the operator's touch panels or a PLC with a touch screen. Communication between the digital elements of the control system is recommended via the RS-485 interface. For software control systems for biodynamic lighting parameters, a digital PI-controller with feedback via a light sensor should be used. In this case, it is necessary to provide an aperiodic digital filter of the illumination measurement signal with a time constant of about 125 ms.
Текст научной статьи Цифровое управление биодинамическими системами освещения в птичниках
Применение цифровых управляющих устройств востребовано в различных технологических процессах птицеводства [10, 15]. Особенно актуально их применение в системах автоматического управления микроклиматом в птицеводческом помещении, что позволяет в большей степени раскрыть генетический потенциал высокопродуктивных кроссов птицы. Важным фактором, влияющим на поведение и продуктивность сельскохозяйственной птицы, является световая среда и используемые для ее создания технические средства [1, 13, 14, 17, 23].
Искусственно создаваемая световая среда не в полной мере соответствует естественным потребностям организма птицы [4, 18, 24]. Улучшить условия содержания птицы и повысить показатели ее продуктивности возможно за счет применения цифровых систем биодинамического светодиодного освещения с изменяемыми световым потоком и спектральным составом оптического излучения [19–22]. Однако технические параметры и режимы работы цифровых элементов управления такими система на данный момент исследованы недостаточно. Разработка цифровых систем управления биодинамическим освещением птичников требует комплексного подхода к учету особенностей работы ее цифровых элементов и способов реализации связей между ними.
Целью работы является анализ цифровых элементов современных систем управления биодинамическим освещением птичников и разработка рекомендаций их по проектированию.
Материалы и методы
В работе использовались элементы методов системного и математического анализа, компьютерного моделирования; сведения из теории электро- и светотехники, автоматического управления. Обработка данных и построение графиков выполнялась с применением программы Microsoft Office Excel.
Результаты и обсуждение
В системах биодинамического освещения птичников для изменения освещенности и спектрального состава излучения светодиодных светильников целесообразно использовать метод управления оттенками белого света [8]. Реализация метода требует использования минимум двух белых светодиодов (СИД) с разными коррелированными цветовыми температурами и отдельными каналами управления их световыми потоками [12]. Последние корректно изменять путем ШИМ-регулирования прямых токов через светодиоды. При этом следует учитывать динамику температуры нагрева СИД, которая существенно влияет на параметры его излучения [2]. При таком способе регулирования световой поток светодиода, Ф, может быть вычислен по формуле:
ф = n k D i A U ; (1)
где n — световая отдача светодиода, лм/Вт;
kD = 0.. .1 о.е. - коэффициент заполнения ШИМ-сигнала;
I A - амплитуда ШИМ-регулирования прямого тока светодиода, А;
U - прямое падение напряжения на светодиоде, В.
Широкий диапазон изменения коррелированной цветовой температуры излучения светодиодного светильника может быть получен путем изменения коэффициентов k D прямых токов светодиодов белого теплого и холодного света, с номинальными коррелированными цветовыми температурами около 2700^3000 К и 5000^6500 К.
Стабилизацию прямых токов и ШИМ-управление световыми потоками СИД рационально выполнять с помощью линейного светодиодного драйвера с генерацией управляющего ШИМ-сигнала с помощью микроконтроллера [11]. При этом продолжительности импульсов, tON, и пауз, tOFF, вычисляются по соответствующим выражениям:
t ON = V ( kD f ) ; t OFF = V f — t ON ,
где f - частота ШИМ-сигнала, Гц.
Продолжительности tON и tOFF квантуются во времени исходя из частоты и разрядности ШИМ-сигналов, что сказывается на пульсациях светового потока СИД. Следует учитывать, что это может являться дополнительным стресс-фактором для птицы. Исследования показывают, что негативное влияние на зоотехнические показатели птицы отсутствуют при частоте изменения светового потока более 488 Гц [5]. Частота пульсаций 900 Гц и более не воспринимается птицей [16]. Разрядность сигнала менее 10-ти бит ведет к возникновению «ступенек» при изменении коррелированной цветовой температуры при небольших уровнях освещенности [9].
Автоматическое или ручное изменение параметров освещения выполняется контроллером управления освещением, который может представлять собой отдельное устройство (рис. 1) или быть в программном составе котроллера управления микроклиматом.
Также котроллер управления освещением может выполняться на базе общепромышленного ПЛК. Важным для контроллера освещения является реализация функции «рассвет-закат», позволяющая плавно изменять уровень освещенности в течении заданной продолжительности времени, что снижает стрессовое воздействие резкого изменения света на организм птицы [18]. Связь котроллера освещения с элементами управления светильниками и внешними устройствами целесообразно выполнять на основе цифровых промышленных помехозащищенных интересов, таких как RS-485.

Рисунок 1 - Некоторые специализированные контроллеры для управления


искусственным освещением в птичнике
В соответствии с методическим руководством по проектированию [8] при разработке систем динамического освещения рекомендуется использовать сенсорные панели оператора, позволяющие реализовать современный эргономичный человеко-машинный интерфейс.
Точное поддержание заданных параметров биодинамического освещения в птичнике в реальных условиях эксплуатации (с учетом запыленности светильников, естественного снижения светового потока СИД, изменения величины питающего напряжения и т.д.) возможно за счет применения систем программного управления уровнем освещенности кормушки и коррелированной цветовой температуры оптического излучения светодиодных светильников. Для этого целесообразно использовать ПИ- или ПИД-регулятор с обратной связью по освещенности через соответствующий датчик, что обеспечивает статистическую ошибку регулирования близкой к нулю [12]. С целью минимизации передачи данных по интерфейсам цифровой регулятор освещенности предпочтительно выполнять на базе микроконтроллера, производящего генерацию ШИМ-сигналов управления световыми потоками светодиодов.
Основными параметрами настройки ПИД-регулятора являются: пропорциональный коэффициент передачи, постоянные времени интегрирования и дифференцирования [6]. Также в качестве варьируемого параметра в цифровых системах может выступать время дискретизации регулятора [7]. Практическое применение ПИ-регулятора отличается относительно большей простой настройкой параметров регулятора чем ПИД-регулятора. Математическое представление ПИ-регулятора, выходной величиной которого является регулирующий коэффициент kR заполнения управляющего ШИМ-сигнала, описывается выражением:
kR
= kP
1 ^
^ E + Т i ^ Edt MC ’
V Ti 7
где ДЕ - сигнал рассогласования, определяемый как разница между заданной и измеренной величинами освещенности, лк;
kP - пропорциональный коэффициент передачи, 1/лк;

T I - постоянная времени интегрирования, с;
dt Mc — период выполнения цикла программы микроконтроллером, с.
При использовании программного расчета регулирующего коэффициента kR в каждом цикле программы временем дискретизации регулятора допустимо пренебречь. Высокие показатели качества работы системы автоматического регулирования освещенности обеспечиваются при использовании метода определения настроек параметров цифрового регулятора, предложенного А. П. Копеловичем [12].
Для измерения фактической освещенности при ШИМ-управлении световыми потоками светодиодов в последние годы широкое распространение получили цифровые датчики на основе полупроводниковых микросхем. Такой датчик производит измерение сигнала по следующему алгоритму: сначала выполняется суммирование измерений освещенности в течении времени интегрирования, затем определяется среднее значение и формируется конечный результат измерений. Математическое описание процесса измерения освещенности, E I , цифровым датчиком с учетом дискретизации процесса измерений во времени, может быть представлено в виде:
E = j0 E i dt E
, t DO
где Ei - освещенность отдельного измерения в периоде интегрирования показаний датчика, лк;
dtE - продолжительность преобразования измерений освещенности аналого-цифровым преобразователем, с;
t DO - продолжительность интегрирования освещенности, с.
Кроме этого необходимо учитывать время, затрачиваемое на обработку и передачу данных измерений освещенности по цифровому интерфейсу. Квантование освещенности по уровню при высокой разрядности измерений аналого-цифрового преобразователя датчика освещенности допустимо не учитывать [12].
В подобных цифровых системах управления биодинамическим освещением наиболее инертным элементом является датчик освещенности [3], время интегрирования измерения которого на один - два порядка выше постоянных времени остальных элементов системы, что может приводить к скачкообразному изменению регулируемой величины [9]. Для корректного измерения освещенности желательно использовать цифровой фильтр сигнала измерений освещенности [12]. Выходная величина освещенности, E F , сглаженная фильтром на основе апериодического звена первого порядка в дискретной форме, имеет вид:
EF = EF 0 + ( EI — EF 0 ) dtMC lTF ’ (6)
где E F о - освещенность на выходе фильтра в предыдущем шаге вычислений, с;
T F - постоянная времени фильтра, с.
Применение апериодического фильтра измерений освещенности (рис. 2), несмотря на скачкообразное изменение освещенности E I , позволяет САР более корректно формировать управляющее воздействие с помощью ПИ-регулятора, что положительно сказывается на качестве регулирования системы.
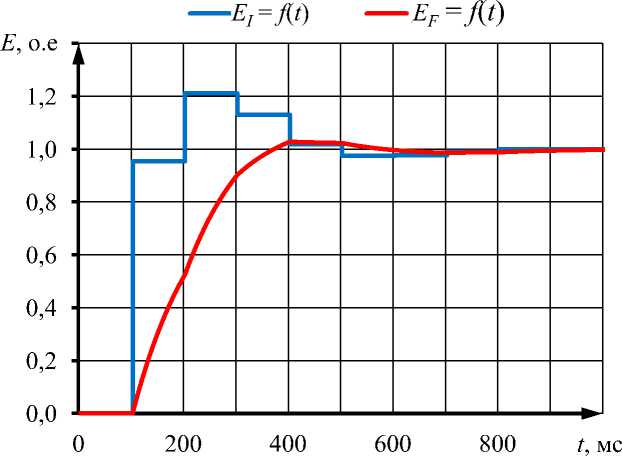
Рисунок 2 – Переходные процессы освещенности системы автоматического регулирования по задающему воздействию
В качестве ориентировочной величины постоянной времени фильтра рационально использовать T F = 0,125 с, которая равна постоянной времени зрения наблюдателя [12].
Выводы
В системах управления биодинамическим освещением птичников для изменения освещенности и спектрального состава излучения светодиодных светильников целесообразно использовать ШИМ-управление световыми потоками светодиодов белого теплого и холодного света. Для этого следует использовать частоту ШИМ-сигнала более 1 кГц при его разрядности не менее 10-ти бит. Это позволяет снизить негативное влияние от эффектов мерцания светодиодов и «ступенек» светового потока СИД при ШИМ-управлении.
Для оперативного управления и изменения настроек работы системы освещения целесообразно использовать в ее составе сенсорные панели оператора или программируемые логические контроллеры с сенсорным экраном, позволяющие реализовать современный эргономичный человеко-машинный интерфейс. Связь между цифровыми элементами системы управления рекомендуется осуществлять посредством интерфейса RS-485.
В качестве регулятора систем программного управления параметрами биодинамического освещения рационально использовать цифровой ПИ-регулятор (4) с обратной связью через датчик освещенности. С целью определения настроек параметров такого регулятора стоит применять метод Копеловича. При этом следует учитывать существенную дискретизацию измерений освещенности датчиком во времени и предусмотреть для него цифровой фильтр, который может быть реализован на базе апериодического звена первого порядка (6) с постоянной времени, равной 125 мс.
