Цифровое управление кластером шести гиродинов при начальной ориентации космического аппарата

Автор: Сомов Евгений Иванович, Бутырин Сергей Анфимович, Сомов Сергей Евгеньевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 5 т.21, 2019 года.
Бесплатный доступ
Рассматриваются вопросы начальной ориентации космического аппарата после отделения от ракеты-носителя с режимами успокоения, ориентации на Солнце, разгона роторов шести гиродинов, их включения в контур управления и приведения ориентации космического аппарата к заданной в орбитальной системе координат. Приводятся численные результаты по эффективности разработанных алгоритмов, применяемых для спутников и космических роботов.
Космический аппарат, разгон роторов гиродинов, цифровое управление, начальная ориентация
Короткий адрес: https://sciup.org/148312598
IDR: 148312598 | УДК: 629.78
Digital control of six gyrodine cluster at the spacecraft initial orientation
The problems of the initial orientation of the spacecraft after separation from the launch vehicle with the modes of calming, orientation to the Sun, acceleration of the rotors of the six gyrodines with their inclusion in the control loop, and bringing the spacecraft orientation to the specified in orbital coordinate system are considered. Numerical results on the efficiency of the developed algorithms used for satellites and space robots are presented.
Текст научной статьи Цифровое управление кластером шести гиродинов при начальной ориентации космического аппарата
до номинального значения h g их собственного кинетического момента (КМ) лишь для пар ГД.
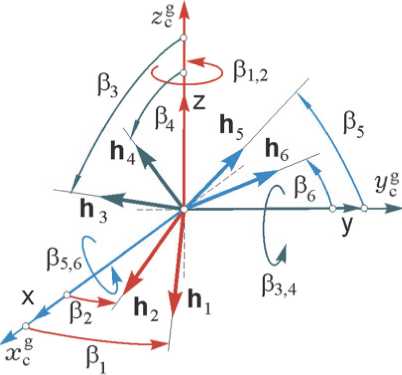
Рис. 1. Отсчет углов ГД в СГК по схеме 3-SPE
После отделения от ракеты-носителя КА начинает кувыркаться – вращаться с вектором угловой скорости ω изменяемого направления в базисе B , связанного с его корпусом. Здесь выделяются следующие режимы начальной ориентации: (i) успокоение (остановка вращения) КА в инерциальном базисе с помощью МП; (ii) накопление измерительной информации, перевод ориентации КА к требуемой и стабилизация его положения c минимизацией усредненного за виток ССО углового рассогласование ϕsp = arccos〈np,s〉 между ортом np к плоскости панелей солнечных батарей (СБ) и ортом s направления на Солнце с помощью МП и одноосного привода панелей СБ, когда выполняется разгон роторов гиродинов и приведение СГК парковое состояние; (iii) включение СГК в кон- тур управления, автономное угловое наведение и управление КА с приведением его ориентации к заданной в орбитальном базисе O и последующей угловой стабилизацией.
В нашей статье [1], публикуемой в этом же номере журнала, аналогичная задача исследована для КА, управляемого минимально-избыточным кластером реактивных двигателей-маховиков, где отсутствует необходимость предварительного разгона их роторов, и, следовательно, длительной ориентации панелей СБ на Солнце для энергетического обеспечения такого разгона.
МАТЕМАТИЧЕСКИЕ МОДЕЛИ И ПОСТАНОВКА ЗАДАЧИ
Инерциальными системами координат (ИСК), используемыми для описания перемещения центра масс и углового движения КА, являются геоцентрическая экваториальная система координат (СК) I ⊕ (O ⊕ XIeYeIZeI ) и солнечноэклиптическая СК I s(OsXsIYsIZsI) , рис. 2.
Начало ИСК I ⊕ расположено в центре Земли O ⊕ , ось X e I направлена в точку весеннего равноденствия ϒ , а ось Z e I – на Северный полюс мира P N по оси суточного вращения Земли с угловой скоростью ω e . ИСК I s имеет начало в центре Солнца O s , ее ось X s I также направлена в точку ϒ , а оси Y s I и Z s I получаются поворотом соответствующих осей Y e I , Z e I на угол ε e относительно оси X I e (X s I ) . Угол ε e между плоскостями земного экватора X e I O ⊕ Y e I и эклиптики X s I O s Y s I равен 0.41015234 рад (23.44 град), см. рис. 1. В ИСК I ⊕ орт e s направления из центра Солнца к центру Земли имеет вид e s I ( t ) = [ -ε e ] 1 [ -ρ s ( t )] 3 {1,0,0} , где ρ s ( t ) = ρ s 0 +ω s ( t - t 0 ) , ρ s 0 =ρ s ( t 0 ) , t 0 – некоторый начальный момент времени, ω s = 0.19965 ⋅ 10-6
с-1– средняя угловая скорость обращения Земли вокруг Солнца в плоскости эклиптики за тропический год (365.2422 средних солнечных суток). Здесь и далее используются общепринятые обозначения { ⋅ } = col( ⋅ ) , [ ⋅ ] = line( ⋅ ) , 〈⋅ , ⋅〉 , ( ⋅ )t , [ a x ] и ° ,~ для векторов, матриц и кватернионов, матрицы [ α ] i элементарного поворота вокруг i -ой оси на угол α , i = 1,2,3 ≡ 1 ÷ 3 , а также C α ≡ cos α , S α ≡ sin α . Астрономическая долгота Солнца λ s , которая определяется в ИСК I ⊕ как угол между направлением на точку весны ϒ и ортом s = - e s направления от центра Земли к центру Солнца, вычисляется по формуле λ s ( t ) =π+ρ s ( t ) .
Применяется геодезическая Гринвичская система координат (ГСК) G (O ffi XeYeZe) , связанная с Землей, которая вращается с угловой скоростью ω e = 7.2921158 . 10-6 с-1. Положение ГСК E относительно ИСК I ⊕ определяется углом ρ e ( t ) =ρ e 0 +ω e ( t - t 0 ) , где ρ e 0 =ρ e ( t 0 ) – угловое положение Гринвичского меридиана относительно направления на точку ϒ при t = t 0 и ω e - модуль вектора M e = {0,0, W e } угловой скорости вращения Земли. Преобразование векторов-столбцов расположения r o и скорости v o поступательного движения ЦМ O КА из ИСК I ⊕ ( r o I , v o I ) в ГСК G ( r o G , v o G ) выполняется по соотношениям r G = [ Р е ] з r ; V о = - [ m e x ][ P eL r O + [ P e ]3 V { , а обратное преобразование – по соотношениям Г О = М Г ; V = [ P e ] 3 ( v : + M. Х ] Г О ° ) .
Плоскость орбиты КА в ИСК определяют долгота восходящего узла Ω^ o и наклонение i ο , см рис. 3. Положение центра масс КА на эллиптической орбите с эксцентриситетом e o определяется вектором r o ( t ) и истинной аномалией ν o ( t ) , отсчитываемой от перигелия орбиты π , который находится на угловом расстоянии ωπ от ее восходящего узла в направлении движении ЦМ.
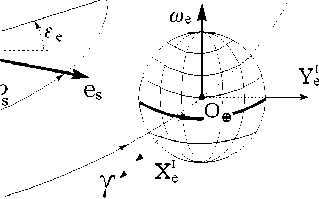
Рис. 2. Инерциальные СК
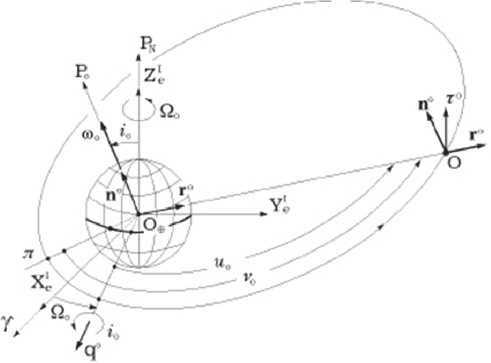
Рис. 3. Орбита КА и орбитальная СК
Орбитальная система координат (ОСК) O (Oxoyozo) с началом в центре масс КА O и ортами o1 ,o2 , o3 имеет следующие направления осей и связанных с ними ортов: ось Oyo и орт o2 совпадают по направлению с ортом r o вектора rο (t); ось Ozo и орт o3 = -no направлены o противоположно орту нормали n к плоскости орбиты; ось Oxo с ортом o1 дополняет ОСК до правой – принадлежит плоскости орбиты, перпендикулярна оси Oyo и направлена в сторону орбитального движения центра масс КА. Вектор угловой скорости ωo орбитального движения ЦМ КА определяется как шо = шо(t)по = vo(t)n0.
Геомагнитная СК M (O ⊕XmYmZm) определяется с помощью вектора магнитного момента M⊕ =M⊕m⊕ магнитного поля Земли (МПЗ) с модулем M⊕ следующим образом: ось O⊕Zm направлена по геомагнитной оси с ортом m⊕ , фиксированным в ГСК, а ось O⊕Xm – по линии пересечения геодезического и геомагнитного экваторов. В простейшем случае МПЗ в точке O представляется магнитным потенциалом ди- поля, когда вектор индукции магнитного поля Земли B = Bb с модулем B = µem M⊕aom /ro3(t), m где µe – магнитная проницаемость вакуума и aom – модуль вектора aom =m⊕ - 3〈m⊕,ro〉ro , который направлен по орту b = aom / aom
Используется связная с корпусом КА система координат (ССК) B (O xyz ) (body) с ортами b i , направленными по соответствующим осям ССК. Ориентация ССК B в ИСК I ⊕ определяется кватернионом Λ = ( λ0, λ ) , где λ = { λ i } , вектором параметров Эйлера Λ = { λ0, λ } , который представляется в форме Л = { С ф /2 , e S ф /2 } с ортом e мгновенной оси Эйлера и углом Φ собственного поворота, а также вектором модифицированных параметров Родрига (МПР) О = { о i } = е tg( Ф / 4) , который связан с кватернионом Л прямыми О = Х / (1 + X 0 ) и обратными X 0 = (1 -о 2)/(1 + о 2), Х = 2 о /(1 + о 2) соотношениями.
Связанная с панелями СБ система координат (РСК) P (Op x p y p z p) определяется так: ось O p y p и орт p 2 совпадают по направлению с нормалью n p к плоскости фотоэлементов панелей СБ, ось Op z p и орт p 3 совпадают по направлению соответственно с осью O z и ортом b 3 ССК, а ось Op x p дополняет РСК до правой ортогональной. Угловое положение панелей СБ относительно ССК определяется углом γ p ≡ γ их поворота вокруг оси O z ССК. В парковом положении панелей СБ на корпусе КА угол
γ p = 0 , при этом направления осей РСК и ССК совпадают.
При составлении модели движения спутника начало ССК (точка O ) считается полюсом, который совпадает с центром масс КА при не-деформированном состоянии его конструкции. Кинематические соотношения для кватерниона Λ и вектора МПР σ имеют соответственно вид
Л = Л о ш/ 2;
о = |(1 - о 2) го + 2 о х го + 2 ( о , го ) а , динамика углового движения КА описывается уравнением
J ( Y )(b = -rox G + M p + M m + M g + M d . (2)
Здесь G = J ( y ) ®+ H является вектором КМ электромеханической СУО, где столбец H = { Н i } представляют КМ СГК; вектор M g = {M i g } управляющего момента СГК формируется в виде М 8 =- H , где ( ⋅ )* – символ локальной производной по времени; to = { to i } - вектор абсолютной угловой скорости КА, представленный в ССК O xyz ; J ( γ ) = J o + 2 J p( γ ) – тензор инерции КА при произвольном положении панелей СБ, при этом изменяемая часть тензора инерции каждой панели СБ в ССК представляется в виде
J P( Y ) =
j p с ; +j^; jpx ; c Y ^ Y
J? C V 5 Y j p 5 V 2 + j p c 2
где Jpx , Jpy и Jzp – собственные моменты инерции каждой панели в ее центре масс и J xpyd =Jxp -Jyp ; столбец мР = {(jp;($2,ro, -C2,^2)-2jp^2)Y,
- (jp;(C2,^1 -S2,^2) + 2JZPШ2)Y, -2JP y} представляет вектор момента инерционно-гироскопических сил из-за подвижности двух панелей СБ; Mm = {mim} – вектор управляющего механического момента магнитного привода (МП), а вектор Md представляет внешние возмущающие моменты. Вектор управляющего механического момента МП формируется по формуле Mm = {mim} = -L × B, где вектор электромагнитного момента (ЭММ) L = {li} с ограниченными компонентами | li | ≤ lm и вектор индукции магнитного поля Земли B с ортом b определены в ССК.
Вводятся также ортогональная гироскопическая система координат (ГСК) Oxcgycgzcg силового гироскопического кластера, для простоты совпадающая с ССК Oxyz, отсчет углов ГД вp относительно осей их подвеса, см. рис. 1, и обозначения проекций ортов КМ каждого ГД на оси системы координат СГК х1 = С] - cosР]; x2 = C2 - cos в2; y, = S, - sinв1;
y 2 = S 2 - sin в 2 ; x 3 = S 3 - sin P 3 ; x 4 = S 4 - sin P 4 ;
z 3 C з = ГО^ ; z 4 — C 4 — cos в 4 ; y 5 C 5 = cosP 3 ;
y 6 = C 6 = cos 3 6 ; z 5 = S 5 = sin p 5 ; z 6 = S 6 = sin& •
f , j ( P ) - X j2 — X 34 +p (X j2 X 34 — 1);
f , 2 ( P ) - X 56 - X 12 + P (X 5s X 12 - J);
f , 3 ( P ) - X 34 - X 5 6 +P (X 34 X 56 — 1),
Тогда вектор нормированного кинетиче-
ского момента СГК h® — Н ( в ) /К , , где столбец р = { в p } , p = 1 ^ 6 , и градиентная матрица A h ( Р ) = 5 h / д р представляются в виде
где постоянный параметр p удовлетворяет условию 0 < p < 1. Для представления условий однозначной разрешимости уравнения h(P) = h, где h = {x, y, z} является известным столбцом, относительно синусов и косинусов углов в p всех шести гиродинов, вводятся обозначения p12 = V4 — (x12 ) ; q12 = V4 — (y 12 ) ;
A h ( P ) =
|
x |
" C 1 + C 2 |
+ S 3 |
+ S 4 |
||
|
h = |
y |
= |
S 1 + S 2 |
+ C 5 |
+ C 6 |
|
. z . |
. C 3 + C 4 |
+ S 5 |
+ S 6 . |
- S 1
C i
- S 2
C 2
C 3
C 4
0 - S 5
-
S 6
p 34 = V4 — ( z 34 ) ; q 34 = V4 — ( x 34 ) ;
p 56 = j ^-y ^y lef ; q 56 = ^A- z y^ Ief ;
- S 3
- S 4
C 5
S
Вектором цифрового управления СГК
и , ( t ) — {и ®, ( t )} с периодом T u , u pk ( t ) = u pk V t g [ t k , t k + 1 ) , 4 + 1 = tk + Tu , k g N 0 , считается вектор P k - { P pk } — и g скоростей ГД относительно осей их подвеса с ограниченными по
модулю компонентами | в ( t )| <в m , кусочнонепрерывный управляющий момент СГК фор-
мируется по соотношениям ■
M g ( t ) = - h g A h ( p ( t ) u g ( t ) ; P ( t ) = u g ( t ) . (3)
Сингулярные состояния этой схемы возникают при таких угловых положениях ГД, когда матрица Грамма G ( p ) = A h ( P ) A h ( P ) теряет полный ранг, т.е. при G = det( G ( p ) = 0 . Важной проблемой управления СГК избыточной структуры является выбор функции распределения вектора КМ СГК между ГД - закона настройки СГК. Наиболее рациональными [2] являются явные законы настройки, когда все характеристики движения ГД получаются по аналитическим соотношениям. При обозначениях
Условия разрешимости векторного уравнения h ( P ( t ) = h ( t ) имеют вид
A x = d x {1 - [1 - 4 p (( q 12 - p 34 )( x /2)
+ p ( q 12 p 34 - ( x /2) 2 ))/ d^}/ P ;
Ay= dy {1 - [1 - 4 p (( q 56 - px 2)( y /2)
y y (3)
+ p ( q 56 P 12 - ( y /2) 2 ))/ d^T}/ p ;
A z = d z {1 - [1 - 4 p (( q 34 - p 56 )( z /2)
+ p ( q 34 p 56 - ( z /2) 2 ))/ d^T}/ P
и при введении столбца A = { A x , A y , A z } очевидным образом преобразуются к нелинейному векторному уравнению A = Ф ( h , A ) . Получить аналитическое решение этого уравнения для определения углов в*, ГД при парковом состоянии СГК весьма затруднительно, но его
xj2 = x j + X 2 ; X 34 = X 3 + X 4 ;
y j2 = y j + y 2 ;
y 56 y 5 + y 6 ; z 34 z 3 + z 4 ; z 56 z 5 + z 6 ;
численное решение достигается практически мгновенно по методу простой итерации - при рациональном выборе начального точки достаточно лишь 2-3 итераций для получения результата с приемлемой точностью.
Далее при введении обозначений
X
X 12
X
; X 34
X 34 ~ y 12
Д-Ж ’ y 12 = 4 < ’
а1 =
x + A x 2
b1 =
2-^. ;
С 1 = aa i + b1 ;
X 12
V4 - y 2

. X
; z 34
Z 34
^^^^^^^.
X 2
X 34
-
z
_____ 56
V4 - y 56
d 1 = V 4 - C 1 / С 1 ;
a 2 =
z + A z
■ b = x -A x
’ 2 2
и компоненты явного векторного закона настройки f p ( p ) = { f p i , f ) 2 , f } = 0 СГК схемы 3-SPE принимаются в виде [2]
I 2 2 I 2 У + A
c? = Л/a9 + bx ; d9 = Л/4 - c9 /c9; a, =------:
2 2 2 2 2 2 3
b 3 =
z-A z
c 3 — yj a 3 + b 3 ; d 3 — 4 — c 3 / c 3
вычисление синусов и косинусов углов β p всех шести ГД выполняется по явным аналитическим соотношениям
1-я пара (ГД 1 и ГД2):
x i =
a1 - d 1 b1
b + da y i = "T"
. v _ a i + d i b i
; x 2 =
b - da
’ y 2 = —;—;
b + d2a2 x з = ~ ’
2-я пара (ГД3 и ГД4):
|
z 3 = |
a 2 - d 2 b 2 b2 |
— d 2 a 2 |
’ z 4 |
_ a 2 |
+ d 2 b 2 |
|
~ 2 ’ x 4 = пара (ГД5 и ГД6): |
2 |
— d 3 b |
2 |
||
|
a 3 |
|||||
|
3-я |
|||||
|
y 5 = |
2 |
’ |
|||
|
z 5 = |
b3 + d 3 a 3 a 3 |
+ d3b3 |
; z 6 |
= b 3" |
— d 3 a 3 |
|
- 2 ' y - = |
—— 2 |
• 2 |
Положение нечетных ( p = 1,3,5) и четных ( p = 2,4,6) ГД в трех парах i = 1 - 3 удобно представить углами a i = ( в 2 i - 1 + в 2 i )/2 и 5 i = ( в 2 i - 1 - в 2 i ) / 2 , i = 1 - 3 , которые поясняют применяемое выше наименование «ножничной пары» – угол α i определяет центральную линию ai «ножниц», а углы ± δ i – положения векторов КМ h 2 i - 1 и h 2 i относительно линии a i в i -ой паре ГД. Парковое состояние СГК, которому соответствует значение вектора его КМ H = Σ h p = 0 при h p = | h p | = h g , приведено на рис. 4. Здесь векторы КМ всех 3 пар ГД h i = h 2 i - 1 + h 2 i с одинаковыми модулями и концами в точках A , B и C принадлежат плоскости P , которая содержит начало O системы координат СГК, причем векторы h i направлены по линиям ai .
Детальный топологический анализ сингуляр -ных состояний схемы 3-SPE и проходимости внутренних сингулярных поверхностей данной схемы показывает [2], что все эти поверхности проходи-
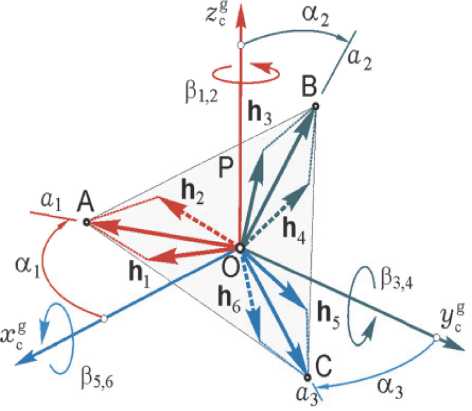
Рис. 4. Парковое состояние СГК мы . При этом наибольшую сложность в исследовании доставляет именно начало ГСК – центра сгустка сингулярных поверхностей, см. рис. 5.
Явный векторный закон настройки СГК принимается в виде
Aр (в) в = -Ф(в) = - sat(фр, црfp (в)), (4) где матрица Лр (в) = дfp (в) / дв и векторная функция sat(фр,Црfp(в)) = {sat(фр, Црf,,-(в)) , i = 1 - 3 имеет параметры ограничения φρ и усиления µρ . Данный закон настройки обеспечивает отсутствие сингулярных состояний СГК по схеме 3-SPE для всех внутренних точек области S вариации вектора его суммарного кинетического момента. Здесь рационален выбор параметра ρ = 0.65.
При известном значении вектора M g управляющего момента СГК вектор цифрового управления всеми шестью ГД u g = 0 q рассчитывается так: сначала вычисляется вектор
Р q =- ({А ьф)), Ар ф)) })-1{Мg/h g, Ф (Р )} и затем с учетом условия max | Рqpk | <Рm формируется вектор цифрового управления ГД ■ u д=в q.
Бесплатформенная инерциальная навигационная система (БИНС), корректируемая сигналами навигационных спутников ГЛОНАСС/ GPS и звездных датчиков, измеряет в моменты времени tT + 1 = t l + T p , l е N 0 = [0,1,2,3...) как векторы расположения и скорости поступательного движения центра масс КА, так и кватернион его ориентации, которые преобразуются в их значения относительно ИСК I @ по аналитическим соотношениям.
При определении ортов r o = r o / ro и v o = v o /v o положение ортов o 1 , o 2 и o 3 ОСК O в ИСК I @ вычисляется на борту КА по алгоритму
0 3 = ( r o X v o )/1 r o X v o | ; o 2 = r o ; o 1 = o 3 X o 2 .
Пусть в моменты времени ts с периодом T q , t s + 1 = t s + T q , s е N 0 с помощью магнитометра измеряется вектор индукции МПЗ B = B b , а в моменты времени tr с периодом T m , t r + 1 = t r + T u m, r е N 0 формируется цифровое управление МП, когда значения компонентов вектора ЭММ L = {l i ) фиксируются V t е [ t r , t r + 1 ) . Цифровое управление СГК формируется в моменты времени tk с периодом T u , t k + , = t k + T , , k е N , .
Задача статьи состоит в (i) анализе процесса успокоение КА в ИСК с помощью МП; (ii) применении авторских алгоритмов автономного наведения и управления ориентацией КА
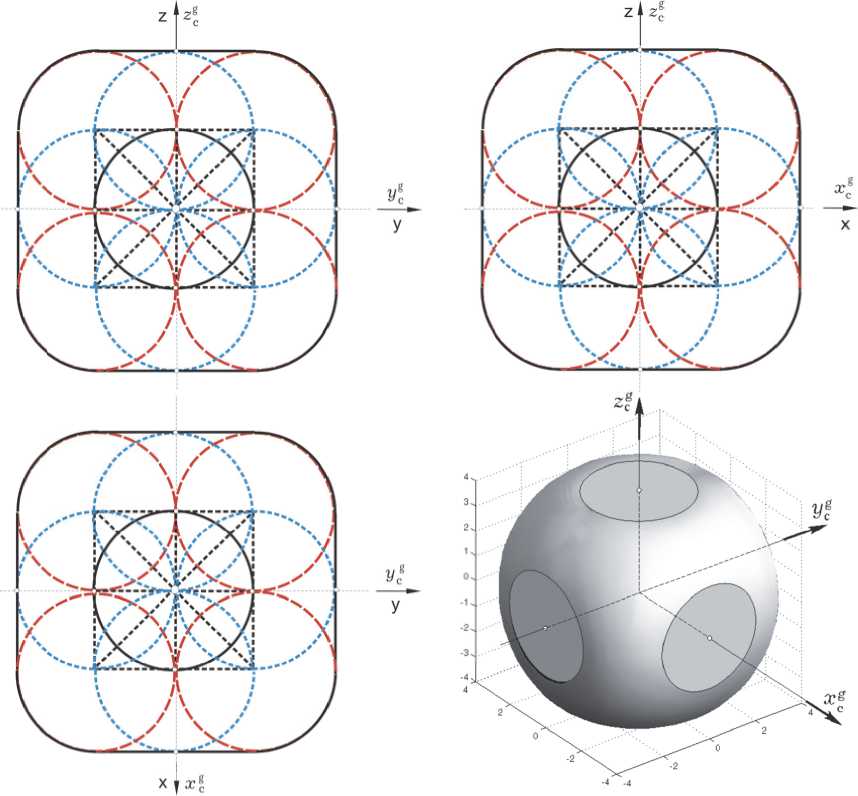
Рис. 5. Множества сингулярных состояний и оболочка области вариации КМ СГК
с помощью МП при переводе его углового положения из произвольного, достигнутого при завершении режима успокоения, в такое угловое положение, при котором орт n p нормали к плоскости панелей СБ направлен на Солнце; (iii) применении авторского метода разгона роторов ГД и приведения СГК в парковое состояние, при котором обеспечивается значение Н = 0 его вектора КМ; (iv) анализе процессов при включении СГК в СУО, автономном угловом наведении и управлении КА с приведением его ориентации к заданной в ОСК и последующей угловой стабилизацией.
АВТОНОМНОЕ УГЛОВОЕ НАВЕДЕНИЕ
Если считать, что СУО при отсутствии внешних возмущений и неподвижных панелях СБ со значением Y p = Y = 0 является сбалансированной по вектору суммарного КМ ( G = J to+ Н = 0 ), то пространственное угловое движение КА описывается уравнениями
Л = Л°ю/2; ю = J-Mg = е = и. (5)
Пусть для формирования вектора управляющего углового ускорения u ≡ ε применяются измерения кватерниона Л ( t ) , которые используются для вычисления вектора МПР а ( t ) , и вектора угловой скорости ю ( t ) . Тогда модель (5) представляется в непрерывной векторной форме
Для эталонной модели автономного наведения (6) в нашей статье [1] решена задача формирования нелинейного цифрового управления uk = u(CTk, юk ) (7)
в моменты времени tk с периодом дискретности Tu и ограниченными модулями век- торов управления и угловой скорости. В этой статье замкнутая модель автономного наведения (6), (7) применялась при переходе КА из произвольной ориентации, достигнутой при завершении режима успокоения КА, в орбитальную ориентацию. При этом ориентация ОСК Ox0 У ° z0 в ИСК определялась матрицей Co и кватернионом Л0, а угловое положение ССК в ОСК представлялось углами крена Ф1 , рыскания ф2 и тангажа ф3 в последовательности 312, кватернионом ошибки ориентации Е = (е0, е) = Л0 ° Л с вектором ё = {ei}, которому соответствуют вектор параметров Эйлера E = {е0,ё}, матрица ошибки ориентации ^ё
C e ( E ) = 1 3 - 2[ ё x ] Q e где Q е = 1 3 ё 0 + [ ё ^ ] , вектор МПР О е = е /(1 + е 0) = е tg( Ф е/4) и вектор-столбец погрешности ориентации 5 ф = {5ф i } = { 2 ё 0 ё } . Вектор погрешности угловой скорости вычисляется по соотношению З го = го — С е го 0 , где го 0 является измеряемым вектором абсолютной угловой скорости ОСК. Применяемая здесь стратегия автономного углового наведения КА содержит два этапа: (i) угловое наведение КА при его переходе из произвольной ориентации в малую окрестность требуемого углового положения орбитального базиса в назначенное время, когда используется эталонная модель (6), (7) с учетом ограничений и дискретные измерения кватерниона ориентации Л 0 и вектора го 0 угловой скорости КА; (ii) автономное угловое наведение КА в малой окрестности перемещения орбитального базиса на основе требования для кватерниона невязки Е k = Л 0 ° Л k = 1 с единичным кватернионом 1 по измерениям кватернионов ориентации Л 0 и Л 0 , а также векторов угловой скорости го 0 и ускорения £ к = ГО 0 ОСК в инерциальном базисе.
В данной статье описанная стратегия ав- тономного углового наведения применяется дважды: 1) при переходе КА от произвольной ориентации, достигнутой при завершении режима успокоения, к требуемой ориентации с наведением панелей СБ на Солнце; 2) после завершения разгона роторов гиродинов при переходе КА от ориентации на Солнце в орбитальную ориентацию.
РЕЖИМ УСПОКОЕНИЯ
Алгоритмы управления магнитным приводом в режиме успокоения КА детально представлены в статье [1]. Здесь применяется сочетание закона управления, оптимального по быстродействию на начальном этапе успокоения, с автоматическим переключением на локально-оп- тимальный закон управления с минимальным принуждением. При этом направление вектора механического момента магнитного привода M = Mт(го) определяется ортом k вектора КМ K = Jro корпуса КА. Пусть в момент времени t0 = 0 известен вектор го0 = го (t0) произвольного направления с модулем | го0 | = го0 < го0 при заданном значении го0. Тогда при тензоре инерции J корпуса КА в этот момент времени становится известным значение вектора КМ K(t0) = K0 = J го0 с модулем К0. Задача успокоения вращательного движения КА состоит в разработке закона управления M = M(ro), который начиная с момента времени t1 обеспечивает выполнение условия го( t) е S т = (го ( t ):| го( t) |
М p = t r + 1 М ( т ) d т = — a t r + 1 К ( т ) d т r tr tr
= — К r (1 — ехр( — aT ,m)) k r .
Этот вектор представляется в виде M p = b r X ( M p X b r ) + b r ( M p , b r ) и для энергетической экономичности МП назначается вектор M p = M p m = b r x ( M p x b r ) с условием ( M p , b r ) = 0 .
Вектор потребной вариации импульса управляющего момента МП M p m = -A I m k r с модулем A I “ = К r (1 — ехр( — aT™)) и ортом k r далее используется для формирования цифрового управления ЭММ L r = { l ir } МП с периодом T™ . При этом определяется взаимная ориентация ортов b r и k r , если | ( b r , k r )| > cos( n /3) , то на текущем периоде дискретности МП не включается, иначе формируется вектор ЭММ L r = ( A I ™ / T ^Xb r X k r )/ B r с ограниченными компонентами | lr | < 1 ™ .
Аналогичный алгоритм цифрового управления МП применяется для автоматической разгрузки кластера гиродинов от накопленного кинетического момента.
Режим успокоения (остановки вращения) КА начинается в момент времени 10 = 0 с вектором го0 произвольного направления при его модуле |гоо | = юо < юо и заканчивается в мо- мент времени to = t1* при произвольных значениях кватерниона Л ° и вектора угловой скорости О° е S ю с заданной константой А0.
НАВЕДЕНИЕ НА СОЛНЦЕ
В используемой концепции данного режима предусмотрено три этапа:
-
1) перевод ориентации корпуса КА к требуемой в ИСК относительно орта s направления на Солнце, когда угол φ s y = arccos 〈 b 2 , s 〉 = 0 ;
-
2) угловая стабилизация корпуса КА, накопление измерительной информации и перевод ориентации корпуса КА в такое усредненное за виток ССО угловое положение в ИСК, относительно которого устанавливаются устойчивые нелинейные угловые колебания КА, обусловленные влиянием внешних возмущающих моментов и управляющего момента магнитного привода;
-
3) продолжение угловой стабилизации корпуса КА с помощью МП и разворот панелей СБ с помощью одноосного шагового привода относительно корпуса КА к такому положению, где будет достигаться минимальное усредненное за виток ССО угловое рассогласование ϕ s p = arccos 〈 n p , s 〉 между ортом n p в РСК P и ортом s направления на Солнце.
Угловое положение орта s относительно плоскости земного экватора в течение года изменяется в диапазоне [-εe,εe] . Для наглядного представления детальной информации о положении орта np относительно орта s вводится подвижная солнечно-эклиптическая система координат O ⊕ xes yes zes с началом в центре Земли O⊕ , где ось O⊕ xes направлена по орту s, ось O⊕ zes совпадает по направлению с осью OsZsI инерциальной солнечно-эклиптической СК Is , а ось O⊕yes дополняет систему до правой ортогональной. Положение орта np относительно орта s в такой СК определяется углом αp2 наклона орта np к плоскости земного экватора (аналог широты) и углом α1p отклонения про-p екции орта n на плоскость земного экватора от оси XIe ИСК I⊕ (аналог долготы). Для любой ССО высотой до 1000 км угловое рассогласование между направлениями из центра Земли O⊕ и из центра масс O спутника на центр Солнца O s не превышает 10 угл. сек. Такое рассогласование в дальнейшем не учитывается.
В парковом положении панелей СБ направления осей РСК и ССК совпадают, при этом орт np =p2 =b2. На основе значений орта s направления на Солнце и орта no нормали к плоскости орбиты в ИСК I⊕ на борту КА определяется орбитальная солнечная система координат (ОССК) S с ортами s1,s2 и s3, которые формируются по соотношениям s2 =s; s3 =(s×no)/|s×no | ; s1 =s2 ×s3. (8) Для вычисления требуемого углового положения ССК B с ортами bi в ИСК I⊕ формируется матрица С = С8 = {[si ]} в виде столбца, составленного из строк [si ] ≡ sit . Целевой кватернион Л8 = (X0,X8) ориентации ССК в ИСК I⊕ определяется по матрице ориентации С8 = {[cij ]} , i, j e 1 ^ 3 на основе явных соотношений
X 0 = (1 + tr C 8)1/2/2;
X 8 = ( C +u+ 2 — c i + 2 i + i )/(4 X 0 ) ; (9)
i = 1 ^ 3, i + 3 = i .
Для исключения неопределенности типа (0/0) в процессе вычисления λ i s , i = 1 ÷ 3 с помощью соотношений (9) при значении λ s 0 = 0 используется известный алгоритм С. Стенли. Кватернион Е 8 = Л 8 ° Л = ( е 0 8 , е 8 ) и вектор МПР G e8 = { g е8} = tg( Ф е8 / 4) е 8 полностью определяют погрешность ориентации ССК B относительно ОССК S .
На первом этапе выполняется переориентация КА из произвольного углового положения при ti = to = t1* к требуемому положению ССК в ИСК I⊕ , которое определяется целевым кватернионом Л8. Здесь применяется эталонная модель автономного углового наведения [1] и управление ориентацией КА выполняется магнитным приводом, при этом на каждом витке орбитального движения КА, начиная с момента времени ti, определяется среднее значение е 8m -т- s eо скалярной части e0 кватерниона углового рассогласования Е8. Длительность этого этапа определяется моментом времени tii, когда удовлетворяется условие е™ ^ 0.9. При рациональном назначении параметра lm МП переходный процесс при любом значении угла фР(t.) = ф е8(t.) < п гарантированно завершается в момент времени начала витка с номером n = 4 . Здесь и далее отсчет номеров n витков ССО выполняется от момента времени очередного прохождения восходящего узла. В результате устанавливаются устойчивые нелинейные угловые колебания КА в окрестности «усредненного» положения орта b2 = np ССК. Разгон роторов в парах ГД начинается в этот же момент времени tii.
На втором этапе, по-прежнему при парковом положении панелей СБ (np = b2 ), начиная с момента времени tii на каждом n ≥ 4 витке ССО в моменты времени tr по значениям ортов b2 (tr) в ИСК I⊕ накапливается сумма Ξ b= Σb2(tr) , вычисляются ее модуль Ξ b=|| Ξ b || и усредненное за виток ССО зна- bm bb m
2 n =Ξ / Ξ . Значение орта b 2 n подставляется вместо орта s в соотношения (8) и (9) для формирования очередного значения целевого кватерниона Л = ( X 0 m +1Д ^J для следующего витка ССО с номером n + 1 .
Третий этап начинается в момент t = tiii ≥ tii , здесь на каждом n ≥ 4 витке ССО выполняется разворот панелей СБ на угол γ = γsp относительно оси Oz ССК. Этот угол определяет положение орта p2 = np нормали к плоскости панелей СБ, который в ССК представляется в виде столбца pb2(γ) = {-Sγ,Cγ.0} . В момент времени t = tiii известно усредненное на предыдущем витке значение орта b2mn в ИСК I⊕ , который в ССК B имеет представление bmb mb mb mb T m
2 n — { b 2 nx ’ b 2 ny ’ b 2 nz } = Л ( t iii ) ° b 2 n ° Л ( t iii ) .
Оптимальное значение угла γ = γps определяется из условия f (Y) —
Нетрудно сообразить, что в общем случае ось O z и орт b 3 ССК не ортогональны плоскости, которая содержит усредненное на предыдущем витке ССО значение орта b 2 m n , соответствующее направлению на Солнце. Поэтому такой разворот панелей СБ может лишь свести к минимуму усредненное угловое рассогласование ϕ s p = arccos 〈 n p , s 〉 между ортом n p к плоскости панелей СБ и ортом s направления на Солнце.
На витках ССО с номерами n ≥ 4 на борту КА рассчитываются очередные значения целевого кватерниона Л sm и потребного угла поворота γ p панелей СБ, однако их фактический разворот можно выполнять не на каждом витке [3], так как положение орта s относительно плоскости земного экватора изменяется со средней угловой скоростью ≈ 3.91 град/месяц.
РАЗГОН РОТОРОВ И ПРИВЕДЕНИЕ СГК В ПАРКОВОЕ СОСТОЯНИЕ
Для СГК по схеме 3-SPE в плоскости изменения КМ каждой i -ой паре ГД введем линии bi , ортогональные линиям ai , рис. 6 a , и будем считать, что направления осей роторов нечетных ( p = 1,3,5) и четных ( p = 2,4,6) ГД в парах i = 1 ÷ 3 зафиксированы в корпусе КА с помощью арретиров по линиям bi при углах ГД относительно осей их подвеса β 2 i - 1 = β 2 i - π , так как согласно применяемой стратегии отсчета углов гиродинов нечетные ГД в парах всегда перемещаются впереди четных, см. рис. 1 и рис. 6 a .
При последовательном разгоне двух гиророторов в каждой паре ГД с одинаковыми ускорениями в противоположных направлениях вплоть до номинального значения h g их собственных КМ инерционные возмущающие моменты компенсируются. В результате КМ роторов всех шести ГД принимают значения h g без влияния их инерционных возмущающих моментов на угловое движение корпуса КА и при отключении арретиров гиродинов СГК готов для приведения его в парковое состояние.
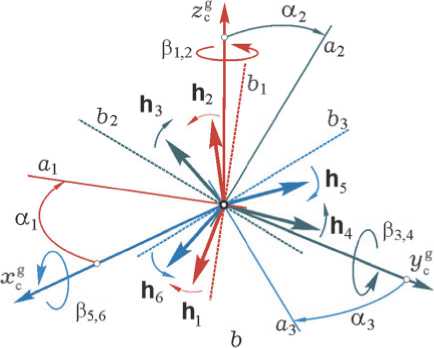
При развороте двух ГД c противоположными векторами КМ в i -ой паре в разные стороны с одинаковыми скоростями относительно осей подвеса создаваемые ими гироскопические моменты складываются, а вектор КМ h i ( t ) этой пары ГД изменяется вдоль центральной линии ai , см. рис. 6 b . Поэтому приведение СГК в парковое состояние с условиями Н ( t ) — 0 и М g (t ) = — Н * ( t ) — О рационально выполнять указанные развороты ги-родинов во всех трех парах одновременно в следующей последовательности:
-
1) все шесть ГД разворачиваются в соответствующих направлениях с одинаковыми постоянными угловыми скоростями до значений их углов β ˆ 2 i - 1 = β * 2 i - 1 -χ , β 2 i = β * 2 i +χ в парах i = 1 ÷ 3 с заданным постоянным углом χ , далее принимается χ = 1 град;
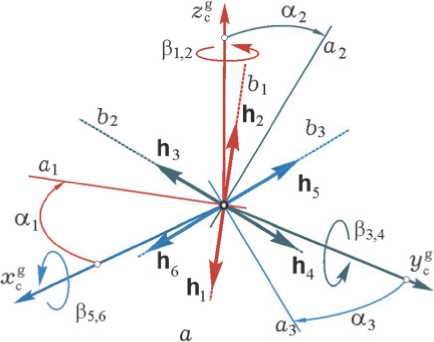
Рис. 6. Схемы разгона роторов в парах гиродинов ( a ) и приведения СГК в парковое состояние ( b )
-
2) задается потребный управляющий гироскопический момент СГК M g ≡ 0 и включается закон его настройки, который автоматически приводит СГК точно в парковое состояние.
В статьях [4,5] подробно представлены результаты исследования динамических процессов при разгоне роторов шести гиродинов и последующем приведении СГК в парковое состояние.
В момент времени t = t 2 рассмариваемый режим заканчивается и СУО переходит в режим приведения ориентации КА к заданной в ОСК с последующей угловой стабилизацией.
ОРБИТАЛЬНАЯ ОРИЕНТАЦИЯ
По измеренным БИНС в момент времени t 2 значениям векторов расположения r o и скорости v o поступательного движения центра масс КА (шесть координат состояния) на его борту по явным аналитическим соотношениям вычисляются сначала значения кватерниона Л ° ( 1 2) = Л ° , шести кеплеровых элементов орбиты и вектора угловой скорости ® ° ( 1 2) = to ° , а затем прогнозируемые значения постоянного кватерниона Л ° ( t«) = Л ° и вектора угловой скорости ю ° ( t , ) = to ° в инерциальном базисе I е для момента времени e = 1 2 + T * , подробности представлены в [1].
Приведение углового положения КА к орбитальной ориентации выполняется в два этапа:
-
1) в момент времени t 2 * СГК включается в контур управления и ∀ t ∈ [ t 2 * , t 3 * ) требуемое изменение ориентации КА реализуется вектором управляющего момента СГК
М X = Ju k + to k x G k , (11)
где G k = Jto k + H k , с использованием дискретных значений вектора u k эталонной модели автономного углового наведения [1] и распределением вектора M k g между шестью ГД с учетом ограниченности модулей | β p ( t ) | ≤ β m , p = 1 ÷ 6 угловых скоростей вокруг осей подвеса ГД ; здесь t 3 * > t 2 * является моментом времени, когда выполняется двойное условие
Φe(t3*)≤Φ*e& ω(t3*)≤Δoω с заданным малым углом Φ *e вектора МПР Ge = e/(l + ё0) = e tg^ e/4);
-
2) в момент времени t = t 3 при малой погрешности углового положения базиса B относительно базиса O работа эталонной модели автономного углового наведения прекращается и начинается фильтрация значений вектора углового рассогласования £ l = -5ф l = - 2 е 0 l е l , l е N 0 с формированием векторов £ f , k е N 0 ,
которые используются в законе управления СГК gk+i = Bgk + C £ k; ink = К (gk + P £ 1); (12)
Mg f f e о e о ~ k =® k x G k + J(C k £ к + LC kto К XJ®k + m k )
с периодом Tu , где Gfk = Jωfk + Hfk и при обозначениях du = 2/Tu ,a = (duTi-1)/(duTi+1)
элементы диагональных матриц B , P и C вычисляются в виде b = (duT2 -1) /(duT2 +1); p = (1 - b)/(1 - a);
c ≡ p ( b - a ) с настраиваемыми параметрами τ1 , τ2 , а также k в диагональной матрицы K .
КОМПТЬЮТЕРНАЯ ИМИТАЦИЯ
Рассматривался КА массой 1000 кг, который выведен на ССО высотой 720 км и долготой восходящего узла 30 град, при раскрытых панелях СБ его тензор инерции J = diag{812, 587, 910} кг м2.
Будем считать, что применяемый магнитный привод имеет ограничение 1m=150 Am2 для компонентов вектора ЭММ и период цифрового управления Tu m = 4 с, причем МП работает во всех режимах начальной ориентации КА, в том числе при его орбитальном полете в тени Земли; номинальное значение собственного кинетического момента каждого из шести ГД h g = 10 Нмс, ограничение скорости его поворота р m = 10 град/c, а период цифрового управления ГД T u = 0.25 с.
На рис. 7 представлена угловая скорость КА на всем интервале компьютерной имитации, где цветами выделены компоненты вектора угловой скорости – синим по крену, зеленым по рысканию и красным по тангажу, а черным цветом отмечены изменения модуля этого вектора.
При модуле | ω 0 | = ω 0 = 3 град/с вектора начальной угловой скорости режим успокоения КА выполняется на интервале времени t ∈ [0, t 1 * ) , где момент времени t 1 * = 13248 с, когда начинается переход СУО в режим ориентации на Солнце. Соответствующие изменения электромагнитного и механического моментов магнитного привода, а также вектора угловой скорости КА, представлены на рис. 8 и 9.
Режим приведения ориентации панелей СБ космического аппарата на Солнце и последущей длительной стабилизации такого положения КА с разгоном роторов гиродинов и приведением СГК в парковое состояние выполняется на интервале времени t ∈ [ t 1 * , t 2 * ) с, где момент времени t 2 * = 47616 с, когда начинается переход СУО в режим орбитальной ориентации КА. Соответствующие изменения угла φ s y отклонения орта b 2 от направления на Солнце и угла γ p пе-
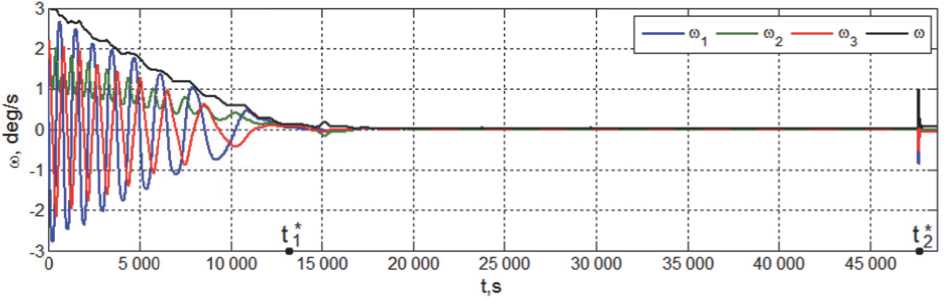
Рис. 7. Угловая скорость КА на всем интервале компьютерной имитации
О 2000 4000 6000 8000 10000 12000 14000 16000 18000
t,s
Рис. 8. Электромагнитный и механический моменты магнитного привода при успокоении КА и переходе СУО в режим ориентации на Солнце
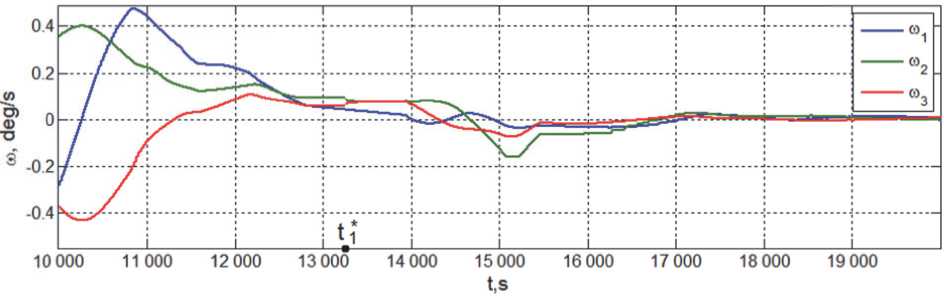
Рис. 9. Угловая скорость при завершении успокоении КА и переходе СУО в режим ориентации на Солнце
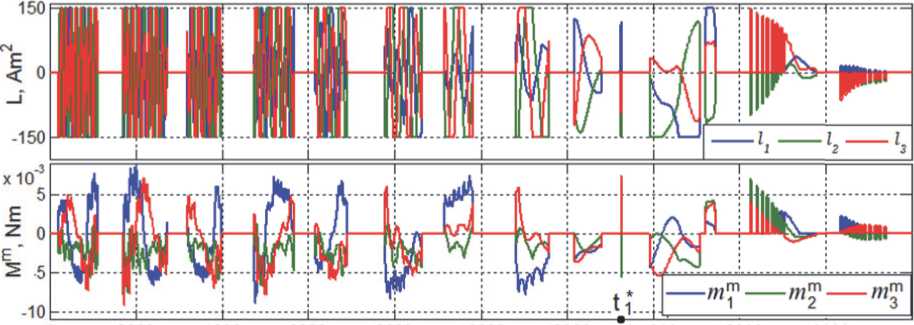
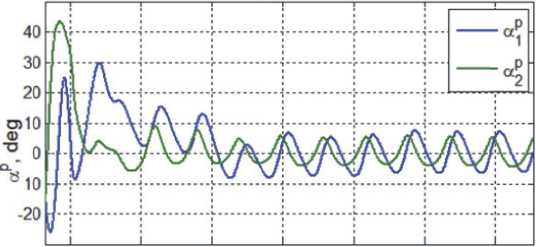
ремещения панелей СБ, а также углов α 1 p и α 2 p ориентации орта n p относительно направления на Солнце, представлены на рис. 10 и 11. Картина такой ориентации орта n p на интервале времени t ∈ [19000, 47616) с приведена на рис. 12, где красным цветом выделен символ Солнца.
Режим включения СГК в контур управления и приведения КА в орбитальную ориентацию с последующей угловой стабилизацией космического аппарата в ОСК выполняется на интервале времени t ∈ [47616, 48616) с. При этом на начальном интервала времени
**
t ∈ [ t 2 , t 3 ) , где
t 2 * = 47616 с и t 3 * = 47724.5 с, используется закон автономного углового наведения с ограничениями ω m = 1 град/с, u m = 0.15 град/с2 и закон управления (11), а ∀ t ≥ t 3 * применяется закон управления (12).
Рис. 13 и 14 представляют общую картину изменения угловых скоростей и углов ориентации КА при его переходе в орбитальную систему координат. Изменения цифровых команд управления гиродинами на начальном и завершающем
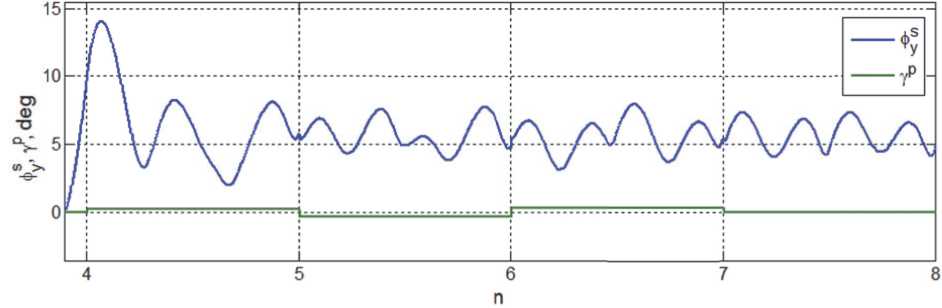
Рис. 10. Угол φ s y отклонения орта b 2 от направления на Солнце и угол γ p перемещения панелей СБ
15 000 20 000 25 000 30 000 35 000 40 000 45 000 t s
Рис. 11. Изменения углов ориентации орта n p в ССК
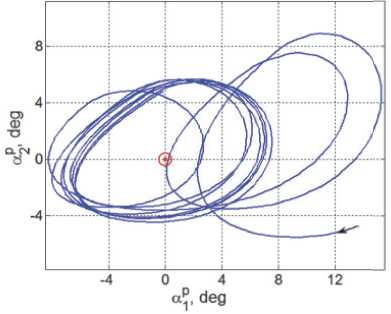
Рис. 12. О риентации орта n p в ССК
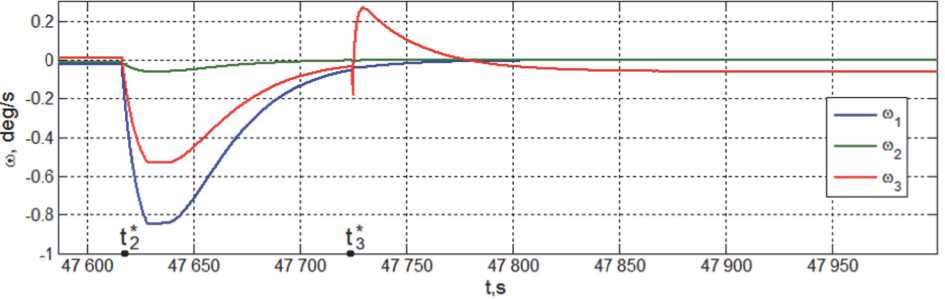
Рис. 13. Угловые скорости КА при переходе в орбитальную ориентацию
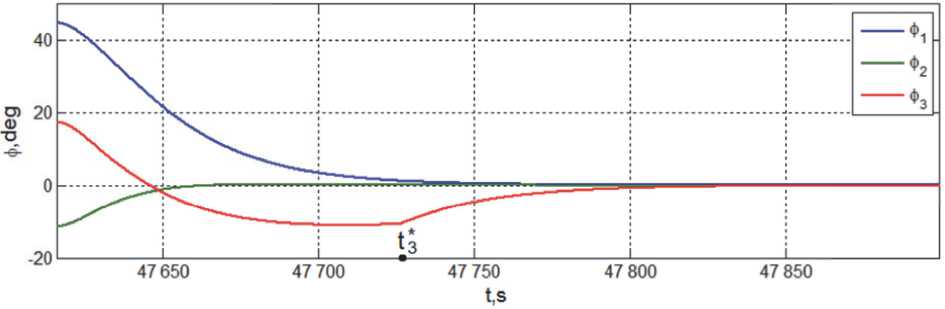
Рис. 14. Углы ориентации КА относительно орбитальной системы координат
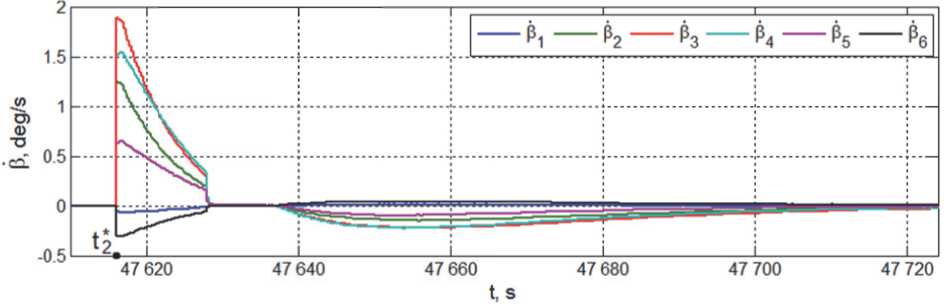
Рис. 15. Угловые скорости гиродинов при начале перехода КА в орбитальную ориентацию
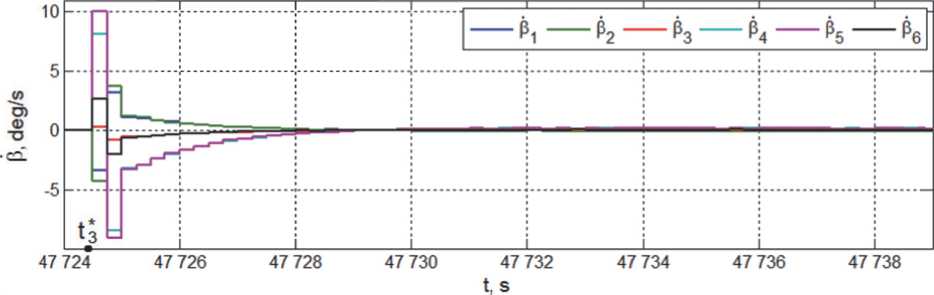
Рис. 16. Угловые скорости гиродинов при завершении перехода КА в орбитальную ориентацию
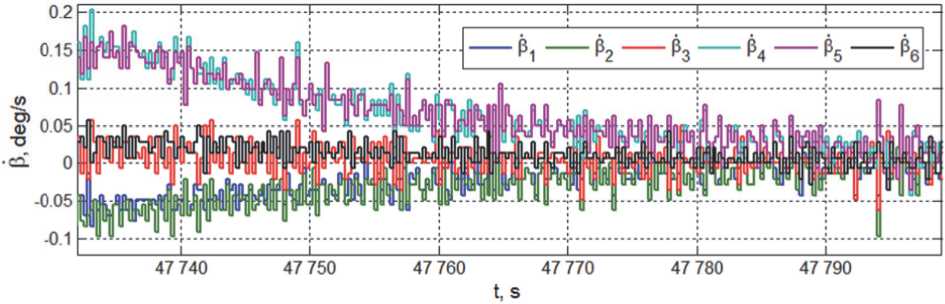
Рис. 17. Угловые скорости гиродинов при стабилизации КА в орбитальной ориентации
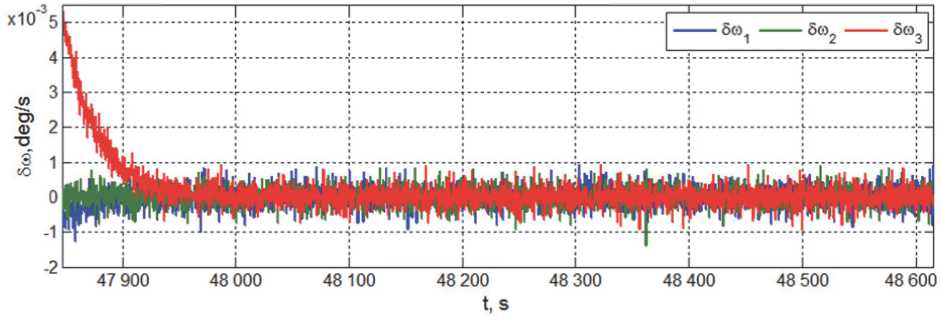
Рис. 18. Погрешности угловых скоростей КА при стабилизации в орбитальной ориентации
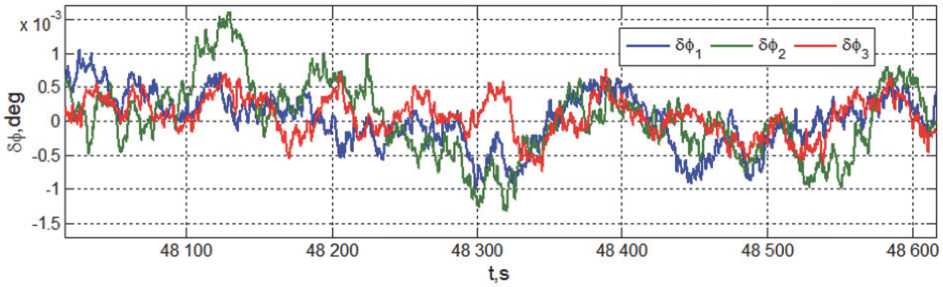
Рис. 19. Погрешности угловой стабилизации КА в орбитальной ориентации
этапах этого режима представлены на рис. 15 и 16, соответственно, а также на рис. 17. Наконец, погрешности установившейся стабилизации КА в орбитальной ориентации по угловым скоростям и углам приведены на рис. 18 и 19.
ЗАКЛЮЧЕНИЕ
Разработана новая стратегия начальной ориентации космического аппарата, оснащенного кластером шести гиродинов, после отделения его от ракеты-носителя с режимами успокоения, ориентации на Солнце, разгона роторов гиродинов и приведения кластера в парковое состояние, включения силового гироскопического кластера в контур цифрового управления космическим аппаратом и приведения его ориентации к заданной в орбитальной системе координат. Представлены численные результаты, демонстрирующие эффективность разработанных алгоритмов, которые могут применяться для информационных спутников и космических роботов.
Список литературы Цифровое управление кластером шести гиродинов при начальной ориентации космического аппарата
- Сомов Е.И, Бутырин С.А., Сомова Т.Е. Автономное наведение и управление ориентацией космического аппарата в режиме слежения // Известия Самарского научного центра РАН. 2019. Том 21. № 5. С. 96-107.
- Сомов Е.И. Анализ сингулярных состояний и синтез явных законов настройки гирокомплексов кратных схем // Гироскопия и навигация. 2013. № 1(80). С. 134-148.
- Сомов Е.И., Бутырин С.А. Энергосберегающее цифровое управление магнитным приводом в аварийном режиме ориентации спутника // Известия Самарского научного центра РАН. 2018. Том 20. № 1. С. 37-44.
- Сомов С.Е. Разгон гиророторов и включение избыточного кластера гиродинов в контур управления ориентацией информационного спутника // Известия Самарского научного центра РАН. 2017. Том 19, № 4. С. 130-138.
- Somov S., Somov Ye., Butyrin S., Somova T. A spin-up of the rotors and enable a control gyro cluster into the spacecraft attitude system // Mathematics in Engineering, Science and Aerospace. 2019. Vol. 10, no. 3. P. 451-462.
